Изобретение относится к области машиностроения, в частности к сельскохозяйственным малогабаритным почвообрабатывающим машинам с системой дистанционного управления поршневого двигателя, и может применяться в таких машинах, как мотокультиваторы, мотоблоки, косилки.
Известный механизм управления включает в себя установленную на оси вращения ручку управления, связанную тягой с рычагом двигателя, возвратную пружину (Патент РФ №2164611, МКИ F02D 9/10, опубл. 2001.02.10).
Наиболее близким по совокупности существенных признаков является механизм управления, содержащий корпус, установленную на оси вращения ручку управления, связанную тягой с регулятором оборотов двигателя, подпружиненным возвратной пружиной (Мотокультиватор «Тарпан», Руководство по эксплуатации 093400000 РЭ. г.Тула, стр.4 п.1.5; стр.6 п.3.4, стр.15 рис.7; стр.16 рис.8а, 8б).
Недостатком известных механизмов управления является то, что данные конструктивные схемы отличаются сложной конструкцией из-за необходимости применения дополнительных узлов, что приводит к неудобствам в эксплуатации и удорожанию самого двигателя.
Техническим результатом, достигаемым данным изобретением, является повышение удобства эксплуатации и упрощение конструкции.
Указанный технический результат достигается тем, что известный механизм дистанционного управления поршневым двигателем, содержащий корпус, ручку управления, установленную на оси вращения, и тягу, связывающую ручку управления с подпружиненным возвратной пружиной регулятором оборотов, снабжен установленной на тяге в свободном контакте с ручкой управления и с упором в корпус пружиной сжатия, обеспечивающей своей высотой фиксацию ручки управления и одновременно усилием удерживающей регулятор в положениях "холостые обороты", а возвратная пружина сформирована предварительной нагрузкой, гарантировано удерживающей ручку управления от вращения, при этом усилие возвратной пружины меньше, чем у пружины сжатия.
Кроме того, технический результат достигается также тем, что:
- предварительная нагрузка возвратной пружины сформирована усилием, обеспечивающим возвратно-поступательное ее деформирование вдоль начальной высоты в пределах рабочих ходов регулятора относительно его положения "холостые обороты",
- пружина сжатия и установленный на оси вращения конец ручки управления размещены внутри корпуса, при этом свободный конец ручки управления выведен наружу через сформированное в корпусе продольное окно длиной в пределах рабочих ходов ручки управления относительно ее положения "холостые обороты".
Изобретение поясняется чертежами, где:
На фиг.1 изображена кинематическая схема механизма дистанционного управления поршневым двигателем, положение "холостые обороты";
на фиг.2 - то же самое, положение "максимальные обороты";
на фиг.3 - то же самое, положение "останов".
Механизм управления состоит из корпуса 1, закрепленного на руле 2, ручки управления 3, тяги 4, связывающей ручку управления с установленным на двигателе 5 регулятором оборотов 6.
Ручка управления выполнена в виде одноплечевого рычага, один конец которого, расположенный внутри корпуса, установлен с возможностью вращения вокруг оси вращения 7. Другой конец ручки управления - свободный и расположен снаружи. Для выхода свободного конца ручки управления в корпусе выполнено продольное окно 8 длиной, равной полному рабочему ходу ручки управления.
Тяга выполнена в виде металлического прутка и заключена снаружи с возможностью возвратно-поступательного перемещения в жесткую стальную оболочку 9. Внутри корпуса на тяге установлена пружина сжатия 10, свободно упирающаяся одним концом в торцевую стенку корпуса, другим концом - в установленный на оси вращения конец ручки управления. Высота пружины сжатия в свободном состоянии соответствует начальному положению ручки управления на холостых оборотах. Регулятор оборотов, выполненный в виде двуплечевого рычага, установлен с возможностью вращения вокруг установленной на двигателе оси вращения 11. Регулятор подпружинен предварительно нагруженной возвратной пружиной 12, высота которой соответствует начальному положению регулятора на холостых оборотах. Предварительное усилие возвратной пружины обеспечивает возвратно-поступательное деформирование возвратной пружине вдоль ее начальной высоты, равное рабочим ходам регулятора относительно его начального положения (положения "холостые обороты"). Кроме того, ручка управления усилием возвратной пружины гарантировано удерживается на пружине сжатия в положении "холостые обороты" и одновременно от возможности вращения относительно своей оси вращения с условием, что усилие возвратной пружины меньше, чем у пружины сжатия.
Механизм управления сцеплением работает следующим образом.
В исходном положении механизма управления, что соответствует отключенному сцеплению и работающему двигателю 5, ручка управления 3 находится в свободном контакте с пружиной сжатия (фиг.1, положение "холостые обороты").
Для включения сцепления после запуска двигателя 5 ручку управления 3 переводят вверх с одновременным ее вращением на оси 7 против часовой стрелки из положения "холостые обороты" в крайнее верхнее положение, т.е. до упора в верхнюю стенку продольного окна 8. При этом ручка управления выходит из контакта с пружиной сжатия 10. При перемещении ручки управления тяга 4 вытягивается из оболочки 9, увлекая за собой регулятор 6, который, вращаясь вокруг оси 11 в направлении, противоположном повороту ручки управления, выйдет из своего исходного положения в сторону максимальных оборотов, нагружая возвратную пружину 12 на растяжение на величину рабочего хода ручки управления. Подача топлива увеличивается, соответственно растут обороты двигателя 5. Срабатывает сцепление (фиг.2, положение "максимальные обороты").
Отпустив ручку управления 3, под действием разгрузки возвратной пружины регулятор 6 вернется в исходное положение холостых оборотов. Подача топлива уменьшается, соответственно уменьшаются обороты двигателя 5. При перемещении регулятора 6 тяга 4, втягиваясь обратно в оболочку 9, поворачивает ручку управления 3 вниз, а так как усилие возвратной пружины 12 меньше усилия пружины сжатия 10, то ручка управления, дойдя до контакта с концом пружины сжатия, будет удерживаться в этом положении начальным установочным усилием возвратной пружины.
Для отключения двигателя 5 ручку управления 3 из положения "холостые обороты" переводят, вращая вокруг оси по часовой стрелке, в крайнее нижнее положение, т.е. до упора в нижнюю стенку продольного окна 8. При этом ручка управления 3, нагружая пружину сжатия 10, втягивает тягу 4 обратно в оболочку 9. Регулятор 6 поворачивается против часовой стрелки в сторону, нагружая возвратную пружину уже на сжатие на величину рабочего хода ручки управления.
При перемещении регулятора ограничивается подача топлива и происходит срабатывание выключателя (не показано) двигателя. В крайнем нижнем положении регулятора, соответственно, и ручки управления в окне корпуса двигатель останавливается (фиг.3, положения останов).
Отпустив свободный конец ручки управления 3, под действием разгрузки пружины сжатия, ручка управления возвращается в положение "холостые обороты". Пружина сжатия 10 встанет в свое свободное состояние, а положение ручки управления 3 зафиксируется усилием возвратной пружины 12.
Реализация заявляемого технического решения позволит плавно регулировать обороты двигателя, значительно упростить конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Корректор регулятора подачи топлива дизеля | 1989 |
|
SU1666791A1 |
| Система дистанционного управления двигателем внутреннего сгорания | 1983 |
|
SU1125395A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ И РЕГУЛИРОВКИ ОБОРОТОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2006 |
|
RU2350769C2 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ СО СМЕННЫМИ ИСТОЧНИКАМИ ЭНЕРГИИ | 2007 |
|
RU2469664C2 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ДИСТАЛЬНО УСТАНОВЛЕННЫМ ПНЕВМАТИЧЕСКИМ ВРАЩАТЕЛЬНЫМ ЭЛЕМЕНТОМ ПРИВОДА | 2007 |
|
RU2469665C2 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ИСПОЛНИТЕЛЬНЫМ УСТРОЙСТВОМ НА ДИСТАЛЬНОМ КОНЦЕ | 2007 |
|
RU2478347C2 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ЕМКОСТЬЮ ХРАНЕНИЯ УВЕЛИЧЕННОГО ОБЪЕМА | 2007 |
|
RU2477087C2 |
| Двигатель внутреннего сгорания | 1990 |
|
SU1816876A1 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ФУНКЦИЯМИ АУДИО И ВИЗУАЛЬНОЙ ОБРАТНОЙ СВЯЗИ | 2007 |
|
RU2469666C2 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКОЙ КАРБЮРАТОРА ПОРШНЕВОГО ДВИГАТЕЛЯ | 1999 |
|
RU2164611C2 |
Изобретение относится к области машиностроения, в частности к сельскохозяйственным малогабаритным почвообрабатывающим машинам с системой дистанционного управления поршневого двигателя, и может применяться в таких машинах, как мотокультиваторы, мотоблоки, косилки. Техническим результатом, достигаемым данным изобретением, является повышение удобства эксплуатации и упрощение конструкции. Реализация заявляемого технического решения позволит плавно регулировать обороты двигателя, значительно упростить конструкцию. Механизм дистанционного управления поршневым двигателем содержит корпус, ручку управления, установленную на оси вращения, и тягу, связывающую ручку управления с подпружиненным возвратной пружиной регулятором оборотов, снабжен установленной на тяге в свободном контакте с ручкой управления и с упором в корпус пружиной сжатия, обеспечивающей своей высотой фиксацию ручки управления и одновременно усилием удерживающей регулятор в положениях "холостые обороты". Возвратная пружина сформирована предварительной нагрузкой, гарантировано удерживающей ручку управления от вращения, при этом усилие возвратной пружины меньше, чем у пружины сжатия. 2 з.п. ф-лы, 3 ил.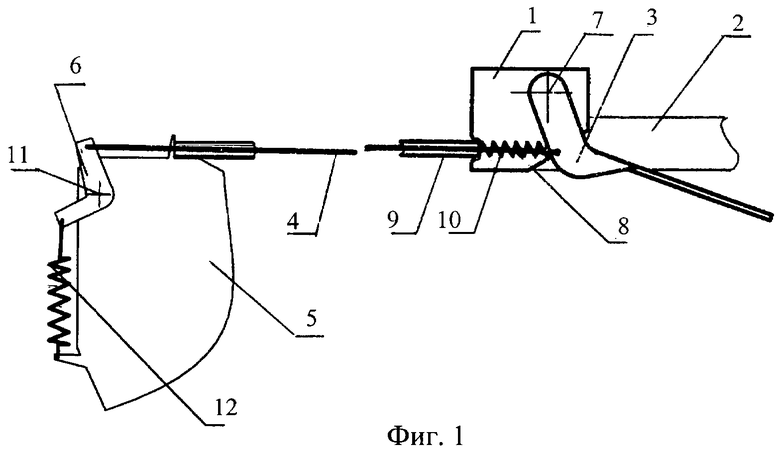
1. Механизм дистанционного управления поршневым двигателем, содержащий корпус, ручку управления, установленную на оси вращения, тягу, связывающую ручку управления с подпружиненным возвратной пружиной регулятором оборотов, отличающийся тем, что он снабжен установленной на тяге в свободном контакте с ручкой управления и с упором в корпус пружиной сжатия, обеспечивающей своей высотой фиксацию ручки управления и одновременно усилием удерживающей регулятор в положениях холостые обороты, а возвратная пружина сформирована предварительной нагрузкой, гарантировано удерживающей ручку управления от вращения, при этом усилие возвратной пружины меньше, чем у пружины сжатия.
2. Механизм по п.1, отличающийся тем, что предварительная нагрузка возвратной пружины сформирована усилием, обеспечивающим возвратно-поступательное деформирование вдоль ее начальной высоты в пределах рабочих ходов регулятора относительно его положения холостые обороты.
3. Механизм по п.1, отличающийся тем, что пружина сжатия и установленный на оси вращения конец ручки управления размещены внутри корпуса, при этом свободный конец ручки управления выведен наружу через сформированное в корпусе продольное окно длиной в пределах рабочих ходов ручки управления относительно ее положения холостые обороты.
| Устройство для погрузки сыпучих или кусковых грузов | 1936 |
|
SU50072A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКОЙ КАРБЮРАТОРА ПОРШНЕВОГО ДВИГАТЕЛЯ | 1999 |
|
RU2164611C2 |
| Привод управления топливным насосом двигателя внутреннего сгорания | 1990 |
|
SU1726813A1 |
| Механизм управления топливоподачей двигателя привода водяного насоса пожарного автомобиля | 1989 |
|
SU1673741A1 |
| Система регулирования частоты вращения двигателя внутреннего сгорания | 1987 |
|
SU1539357A1 |
| US 2003071371 A1, 17.04.2003 | |||
| KR 900001297 В1, 05.03.1990 | |||
| JP 2004116352 A, 15.04.2004 | |||
| JP 7004276 A, 10.05.1995. | |||

