Настоящее изобретение относится к плавучим понтонам, используемым для швартовки судов и шлюпок, в частности парусных или моторных прогулочных катеров и шлюпок, в морских и речных портах, а также на различных водных путях и т.п.
Ввиду мощного развития в последние десятилетия экскурсионного мореплавания как во Франции, так и в других развитых странах происходит переполнение портов, предназначенных для судов указанных типов, что служит причиной недопустимых задержек, которые приходится испытывать пользователям государственных портов, и резкого роста цен за стоянку в частных портах.
Учитывая увеличение количества и средних размеров судов, а также все более заметное расширение сферы применения крупных круизных катамаранов, наблюдается резкая интенсификация указанного явления переполнения портов. В то же время осознание необходимости защиты окружающей среды и законодательство по защите береговой линии ограничивают возможности выделения новых портовых территорий.
В большинстве случаев стоянка на плаву прогулочных парусных судов или моторных катеров осуществляется в портах с помощью швартовных бочек или швартовных траверс, а также на бонах, составленных из нескольких плавучих понтонов, причем между двумя рядами судов каждый раз оставляют довольно большое открытое пространство, с тем чтобы обеспечить возможность их маневрирования при заходе в порт и выходе из него. Эти необходимые зоны маневрирования занимают довольно значительные площади (более 40% площади портовых бассейнов), которые невозможно выделить для стоянки судов.
В документе GB-A-2236716 описаны боны, перемещаемые относительно одного или нескольких неподвижных или плавучих пирсов, например, с помощью зубчатых рельсов или иных пригодных для этой цели средств, часть которых являются подводными. Эти устройства ни разу не были введены в эксплуатацию из-за невозможности постоянно поддерживать боны значительной длины в перпендикулярном положении относительно основных пирсов с помощью устройств, предложенных в указанном документе, принимая во внимание воздействие ветра на верхний рангоут и такелаж пришвартованных судов и практическую нереальность описанных методов направленного перемещения под водой вследствие трудностей, связанных с коррозией. Подвижные боны рассмотренного типа ни при каких обстоятельствах не обладают достаточной устойчивостью.
Таким образом, цель изобретения - устранение указанных недостатков. Для ее достижения предлагаются плавучие подвижные системы, действующие в качестве швартовных траверс, между которыми закреплены боновые элементы. Предусматривается возможность координированного перемещения этих систем относительно некоторых неподвижных пунктов, каковыми являются сваи или причальные палы, вбитые в дно портового бассейна, посредством волочения боновых элементов и пришвартованных к ним судов, что позволяет получить единое пространство для маневрирования всей группы из нескольких бонов.
Итак, предметом изобретения является, прежде всего, комплекс механизированных плавучих подвижных систем перемещения бонов для швартовки судов В и шлюпок в портовых бассейнах Р с обеспечением поступательного перемещения указанных бонов по перпендикулярной к ним траектории таким образом, чтобы оставалось пространство для маневрирования судов В и шлюпок между по меньшей мере двумя смежными бонами, тогда как остальные пространства между бонами закрыты для маневрирования, причем каждая система содержит:
- средства крепления бонов или боновых секций, причем указанные боны или боновые секции расположены перпендикулярно к направлению поступательного перемещения;
- размещенные на обоих ее концах средства, обеспечивающие ее соединение с такой же системой, находящейся напротив нее, или с соединительным средством, находящимся на конце пирса или неподвижного бона;
- средства обеспечения направленного поступательного перемещения параллельно пирсу или основному понтону относительно некоторого неподвижного пункта, каковым является свая или причальный пал либо группа свай или причальных палов, вбитых в дно бассейна, причем указанные неподвижные пункты указанного комплекса установлены в виде правильной сетки с осями, перпендикулярными и параллельными указанному пирсу или основному понтону, и с размером ячеек, позволяющим совершать указанное маневрирование бона или группы смежных бонов, сцепленных своими концами, некоторые системы, управляемые каким-либо неподвижным понтоном;
- средства приведения бонов в поступательное перемещение, причем указанные средства указанного комплекса получают управление от средств синхронизированного управления вышеупомянутым маневрированием.
В соответствии с одним из особых отличительных признаков изобретения на концах плавучих подвижных систем закреплены средства швартовки, образующие швартовные траверсы.
Целесообразно расположить системы таким образом, чтобы в положении остановки они всегда упирались одним концом в причальную сваю или пал, а на другом конце скреплялись с концом такой же находящейся напротив системы или с концом неподвижного понтона или пирса, при этом сами концы указанной такой же системы или указанного неподвижного понтона должны упираться в другую причальную сваю или пал.
Можно предусмотреть средства, предназначенные для соединения и разъединения двух смежных бонов, для достижения их надежного сцепления, обеспечивающего противодействие неблагоприятным метеорологическим условиям с учетом движений воды и приливов-отливов.
Средства обеспечения направленного перемещения плавучей подвижной системы могут состоять из каретки, охватывающей причальный пал и образующей ползун, имеющий возможность подъема и опускания вдоль причального пала с учетом движения воды или приливов-отливов, причем указанная каретка имеет снаружи приводные колеса, установленные с возможностью взаимодействия с рельсами плавучей подвижной системы.
Каждая плавучая подвижная система может приводиться в действие с помощью по меньшей мере одного троса, присоединенного к каретке с двух противоположных сторон, перпендикулярных рельсам, и установленного с возможностью натягивания с помощью двигателя, так что натяжение троса, связанного с одной из сторон, обеспечивает скольжение плавучей подвижной конструкции в направлении, противоположном натяжению, создаваемому тросом.
В соответствии с другим возможным вариантом осуществления специальный установленный на каретке двигатель приводит в действие одно или два зубчатых колеса, передвигающихся по одному или двум зубчатым рельсам таким образом, что это движение приводит к перемещению плавучей подвижной системы в одну или другую сторону.
В соответствии с другим вариантом осуществления плавучая подвижная система содержит удлиненную опорную конструкцию с двумя противолежащими балками, на внутренней стороне которых закреплены рельсы, имеющие возможность взаимодействия с приводными колесами каретки причального пала, причем указанные балки соединены на концах с помощью соединительных конструкций, указанные балки и, в случае необходимости, соединительные конструкции установлены на по меньшей мере одном поплавке, на указанных балках имеются средства, обеспечивающие их соединение с боном или с боновыми секциями с возможным усилением с правой стороны от указанного соединения с помощью триангуляционных силовых цилиндров, на концах указанной конструкции имеются соединительные средства, являющиеся ответными для средств, закрепленных на смежной плавучей подвижной системе, что позволяет сформировать цепочки соединенных плавучих подвижных систем.
В соответствии с первым вариантом оба пространства между обоими рельсами по обе стороны от каретки, связанной с причальным палом, могут быть закрыты решеткой, выполненной с возможностью наматывания и разматывания с любой стороны от каретки в зависимости от перемещения плавучей подвижной системы относительно причального пала, причем предусмотрен пешеходный настил, перекрывающий конструкцию вокруг указанной решетки.
Целесообразно предусмотреть средства для обеспечения наматывания или разматывания одной из решеток со скоростью, зависящей от разматывания и наматывания другой решетки.
Указанные средства наматывания/разматывания одной из решеток относительно другой могут представлять собой по меньшей мере одну цепь, имеющую длину и толщину, пропорциональные соответственно длине и толщине подлежащей наматыванию решетки, установленную с возможностью наматывания вокруг оси намотки первой решетки в направлении, обратном направлению ее наматывания, и на параллельную ось второй решетки также в направлении, обратном направлению ее наматывания, в результате чего после полного наматывания первой решетки на ее ось цепь оказывается целиком размотанной с этой же оси и целиком намотанной на указанную вторую ось, причем вторая решетка полностью размотана, при этом указанная цепь приводится в движение в результате сматывания первой решетки, которая, в свою очередь, приводится в движение от двигателя, обеспечивающего перемещение конструкции.
В соответствии со вторым вариантом защита центрального проема систем может быть обеспечена ограждением, установленным вокруг зоны поступательного перемещения причального пала, при этом по оси секций бонов благодаря подъемным мосткам формируется зона прохода.
Кроме того, между двумя рельсами плавучей подвижной системы могут быть установлены распорки для поддержания постоянного расстояния между рельсами, выполненные таким образом, что они могут быть убраны, когда в результате перемещения конструкции они оказываются у края каретки, распорки могут служить опорой для тягового троса.
В соответствии с другим возможным вариантом изобретения каждый бон содержит несколько секций швартовных понтонов, присоединенных к плавучим подвижным системам, и дополнен одной, так называемой пирсовой плавучей подвижной системой, имеющей возможность скольжения вдоль обычного неподвижного плавучего понтона, и одной, так называемой головной плавучей подвижной системой, находящейся на противоположном конце бона со стороны подхода судов и выполненной с возможностью работы в качестве резервного понтона.
Кроме этого соединение между бонами или секциями бонов и подвижными системами может быть выполнено на уровне, выбранном таким образом, чтобы обеспечить по обе стороны от бона по необходимости две одинаковые или разные длины для размещения судов В или шлюпок.
В соответствии с другим отличительным признаком изобретения каждый неподвижный пункт образован несколькими причальными палами, соответствующие каретки которых соединены с помощью шарнирного соединительного устройства.
Предметом изобретения является также портовая установка, содержащая боны, выполненные с возможностью перемещения с помощью комплекса механизированных плавучих подвижных систем типа описанных выше.
Таким образом, система согласно изобретению гарантирует достижение перпендикулярного перемещения швартовных бонов с использованием простых надводных средств.
Ниже сущность изобретения иллюстрируется более наглядно с помощью описания нескольких вариантов осуществления со ссылками на прилагаемые чертежи, где:
- на фиг.1 и 2 приведены схематические виды сверху портового бассейна, боны которого снабжены плавучими подвижными системами, обеспечивающими их привод с целью их перемещения параллельно друг другу по поверхности воды, при этом на фиг.1 все подвижные боны показаны замкнутыми за исключением первого пролета между неподвижным боном и первым подвижным боном, а на фиг.2 показана ситуация, когда выполнено смещение бонов для создания зоны маневрирования между двумя другими подвижными бонами;
- на фиг.3-5 в большем масштабе показаны виды сверху одной из плавучих подвижных систем бона в трех положениях, а именно в двух предельных положениях и в одном промежуточном положении относительно соответствующего причального пала;
- на фиг.6 в большем масштабе приведен вид сверху одной из плавучих подвижных систем с пришвартованным слева судном, причем указанная система содержит приводные средства согласно первому варианту осуществления с помощью троса и шкивов и с использованием центральной системы продольных решеток, убирающихся посредством наматывания;
- на фиг.7 приведен вид сбоку плавучей подвижной системы по фиг.6 с пришвартованным справа судном, правая часть которой показана в вертикальной проекции, а левая - в разрезе по линии VII-VII на фиг.6;
- на фиг.8 приведен вид в перспективе плавучей подвижной системы в соответствии с вышеупомянутым первым вариантом осуществления с несколькими вырезами, иллюстрирующими различные внутренние элементы конструкции;
- на фиг.9 в большем масштабе показана центральная зона соединения плавучей подвижной системы по фиг.6 с двумя боновыми секциями, образующими бон, которые располагаются по обе стороны от нее, причем плавучая подвижная система смещена вправо относительно связанного с ней причального пала;
- на фиг.10 приведен детальный вид сверху плавучей подвижной системы по фиг.9 со связанной с ней кареткой, где показана подвижная распорка и сделан вырыв для иллюстрации взаимодействия каретки с рельсами;
- на фиг.11 показан вид сбоку в разрезе по линии XI-XI на фиг.10, разрез выполнен по подвижной распорке;
- на фиг.12 в большем масштабе показан вид левой части фиг.10, повернутый на 90°, причем настил бона снят, чтобы можно было видеть рельсы для скольжения системы и устройство, обеспечивающее перемещение распорки, поддерживающей интервал боковых рельсов системы, крайние положения которого показаны штрихпунктирной линией;
- на фиг.13 приведен вид в разрезе по линии XIII-XIII на фиг.12;
- на фиг.14 приведен вид в поперечном разрезе по линии XIV-XIV на фиг.6 с поплавками разных типов, а на фиг.15 - вид в большем масштабе узла каретка-рельсы в разрезе по линии XV-XV на фиг.10;
- на фиг.16 приведен детальный вид сверху каретки, вдоль которой перемещается плавучая подвижная система, причем в рельсах сделаны вырывы для показа колес каретки и троса, обеспечивающего перемещение каретки;
- на фиг.17 приведен вид в поперечном разрезе по линии XVII-XVII на фиг.16;
- на фиг.18 приведено увеличенное изображение участка L на фиг.17, иллюстрирующего систему фиксации решетки на одном из двух зубчатых рельсов плавучей подвижной системы;
- на фиг.19 в большем масштабе приведен вид сверху оконечности плавучей подвижной системы на участке присоединения решетки;
- на фиг.20 приведен вид сбоку в разрезе по линии ХХ-ХХ на фиг.19;
- на фиг.21 приведен вид в перспективе трех составных элементов решетки, иллюстрирующий их конструктивное исполнение и шарнирную связь;
- на фиг.22 и 24 приведены виды сверху оконечных участков плавучей подвижной системы согласно вышеупомянутому первому варианту осуществления в соответствующих предельных положениях ее перемещения;
- на фиг.23 и 25 приведены виды сбоку в разрезе соответственно по линии XXIII-XXIII на фиг.22 и по линии XXV-XXV на фиг.24;
- на фиг.26 приведен частичный вид плавучей подвижной системы согласно одной из разновидностей первого варианта осуществления, которая имеет возможность взаимодействия не с одним, а с двумя причальными палами, причем плавучая подвижная система показана в центральной промежуточной позиции своего перемещения;
- на фиг.27 приведен вид сбоку в разрезе по линии XXVII-XXVII на фиг.26;
- на фиг.28 приведен вид, аналогичный фиг.26, но всего с одним причальным палом, иллюстрирующий плавучую подвижную систему, содержащую приводные средства согласно второму варианту осуществления с использованием зубчатых рельсов и зубчатых колес с двигателем, смонтированным на каретке;
- на фиг.29 приведен вид сбоку в разрезе по линии XXIX-XXIX на фиг.28;
- на фиг.30 приведен вид, аналогичный фиг.28, иллюстрирующий плавучую подвижную систему согласно одной из разновидностей вышеупомянутого второго варианта осуществления, которая имеет возможность взаимодействия не с одним, а с двумя причальными палами;
- на фиг.31 приведен вид сбоку в разрезе по линии XXXI-XXXI на фиг.30;
- на фиг.32 приведен вид сверху центральной части плавучей подвижной системы, содержащей приводные средства по первому варианту осуществления, в соответствии с модификацией, где используют не решетки, убирающиеся посредством наматывания, а систему боковых защитных барьеров и центральные мостки, убирающиеся посредством поворота и располагающиеся по оси соответствующего бона;
- на фиг.33 в большем масштабе приведен вид в поперечном разрезе по линии XXXIII-XXXIII на фиг.32, причем приподнятое положение мостков показано штрихпунктирными линиями;
- на фиг.34 и 35 приведены в аксонометрии виды центральной части плавучей подвижной системы по фиг.32 в двух разных положениях - в первом из них обе части мостков приподняты для обеспечения возможности прохождения этой центральной части на уровне причального пала в процессе перемещения плавучей подвижной системы, а во втором обе части мостков опущены для обеспечения возможности прохода пользователей;
- на фиг.36 на частичном виде сверху в большем масштабе показано соединение так называемой пирсовой плавучей подвижной системы согласно изобретению с обычным плавучим неподвижным понтоном, расположенным рядом с пирсом и имеющим возможность вертикального перемещения с учетом приливов и отливов;
- на фиг.37 в большем масштабе приведен частичный вид сверху вышеупомянутого соединения;
- на фиг.38 приведен вид в разрезе по линии XXVIII -XXVIII на фиг.37;
- на фиг.39 и 40 приведены увеличенные виды сверху противолежащих концов двух плавучих подвижных систем согласно вышеупомянутому первому или второму варианту осуществления с подъемной решеткой соответственно в их разъединенном (фиг.39) и соединенном (фиг.40) положениях;
- на фиг.41 приведен в аксонометрии вид концов двух плавучих подвижных систем по фиг.38 с увеличенной детальной иллюстрацией соединительных средств;
- на фиг.42 приведен схематический вид устройства электрического и электромеханического управления бонами.
В нижеследующем описании и на чертежах некоторые цифровые позиции снабжены буквенными индексами а, b, с и т.д., А, В, С и т.д. или значками «′», «′′», так как они служат для обозначения одинаковых деталей или элементов на разных бонах либо элементов, симметричных относительно средней продольной линии плавучих подвижных систем согласно изобретению. Для простоты эти позиции используются иногда без сопутствующих букв или значков.
Портовый бассейн типа, показанного на фиг.1 и 2, содержит неподвижный обычный пирс 1, соединенный с помощью мостков 2 с плавучим понтоном 3, который мы называем неподвижным и который, как и все традиционные понтоны, может подниматься и опускаться в соответствии с движениями приливов и отливов. Понтон 3 располагается параллельно пирсу 1 и содержит на конце перпендикулярный к пирсу неподвижный бон 4, внутри которого имеются отводы, образующие швартовные траверсы 4', а между ними - швартовные траверсы меньшего размера 6, называемые мостки.
На противоположной от понтона 3 стороне находится неподвижный пирс или так называемый неподвижный плавучий понтон такого же типа, который на фиг.1 и 2 не показан, так как они иллюстрируют лишь часть бассейна. Эти неподвижные части предназначены для удержания бонов 4 в их крайних положениях останова независимо от того, какой из пролетов открыт для прохода судов В.
Плавучий понтон 3 обеспечивает доступ к следующим друг за другом подвижным бонам 4А, 4В, 4С, 4D, которые расположены перпендикулярно к нему, при этом бон 4А находится рядом с неподвижным боном 4 на пути возврата от плавучего понтона 3. Однако, в отличие от традиционных бонов типа бона 4, указанные боны 4A-4D имеют возможность перемещения в горизонтальной плоскости, оставаясь все время перпендикулярными к понтону 3, который параллелен неподвижному пирсу 1. Этот последний служит также для указанных бонов 4A-4D вспомогательной направляющей конструкцией, как будет разъяснено ниже.
На рассматриваемом чертеже показаны четыре из этих подвижных бонов и частично пятый. Количество бонов будет определяться длиной пирса 1. На практике придется находить оптимальный компромисс между количеством бонов и сроками ожидания, обусловленными раскрытием и закрытием различных зон маневрирования, а также временем маневрирования судов.
Каждый из бонов 4A-4D образован рядом следующих друг за другом швартовных боновых секций 5A-5D, перпендикулярных к ветви понтона 3, которая параллельна пирсу 1. В показанном здесь примере количество понтонных секций, образующих бон, равно четырем.
По обе стороны от каждой боновой секции 5A-5D располагаются необходимые для причаливания судов боковые швартовные траверсы типа мостков, которые обозначены все одной и той же позицией 6. Количество и длина этих мостков зависят от размера судов. Их описание здесь не приводится, так как используют мостки традиционного типа. Они размещаются с учетом длины соответствующих судов - как правило, по обе стороны от одного мостка швартуются два судна.
Таким образом, в рассматриваемом здесь примере мостки, находящиеся с одной стороны от бона, оказываются более длинными, чем те, которые располагаются с другой стороны. Организация размещения таких мостков довольно традиционна для начальника порта, однако в данном случае их длина будет всегда меньше длины соседней части плавучих подвижных систем согласно изобретению.
Имеются плавучие подвижные системы 7а1, 7а2, 7а3; 7b1, 7b2, 7b3; 7с1, 7с2, 7с3; 7d1, 7d2, 7d3; 7е1, 7е2, 7е3 (они обозначаются также в общем виде как 7а, 7b, 7с или как 7), которые расположены между соответствующими швартовными понтонными секциями 5А, 5В, 5С, 5D бона 4А, 4В, 4С, 4D перпендикулярно к линии, вдоль которой расположены боновые секции. Они находятся напротив основных швартовных траверс 4' неподвижного бона 4, образуя также швартовные траверсы. Эти системы взаимодействуют между собой и получают направленное перемещение, как будет детально описано ниже, от сваи или причального пала 8, вбитого традиционным способом вертикально в дно портового бассейна. Неподвижный бон 4 традиционно поддерживается причальными палами, обозначенными также позицией 8, которые находятся снаружи полученного таким образом портового бассейна. Подобным же образом швартовные траверсы 4', как и понтон 3 и бон 4, выполнены с возможностью подъема и опускания в соответствии с движениями прилива и отлива вдоль причальных палов 8, находящихся на их концах. Причальные палы 8 располагаются в виде сетки с четырехсторонними ячейками, что необходимо для выравнивания систем 7 указанного комплекса (а также с траверсами 4') перпендикулярно к бонам 4, а также для закрытия бонов 4.
Системы 7 согласно изобретению могут иметь длину порядка тридцати метров.
Кроме сказанного, каждый конец бонов 4А, 4В, 4С, 4D получает направленное перемещение вдоль традиционного неподвижного понтона 3 от так называемой пирсовой швартовной плавучей подвижной системы соответственно 107а, 107b, 107с, 107d, при этом конец первой швартовной плавучей понтонной секции 5А, 5В, 5С, 5D и т.д. перпендикулярен пирсу. Системы 107 будут детальнее описаны ниже при рассмотрении фиг.36-38.
На противоположном конце каждого бона 4A-4D, 4Е и т.д. полученного таким образом швартовного плавучего комплекса, то есть со стороны входа и выхода судов, находится так называемая головная плавучая подвижная система соответственно 207а, 207b, 207с, 207d, которая взаимодействует с комплексом и тоже получает направленное перемещение от причального пала 8, соединенного только с одной стороны с последней швартовной понтонной секцией соответственно 5A-5D, 5Е и т.д.
Плавучие подвижные системы 7а-7е; 107а-107е; 207а-207е, помимо того, что они рассчитаны таким образом, чтобы приводить в движение боны 4А-4Е, как детально описано ниже, выполняют также, как сказано ранее, функции швартовных траверс - только с одной стороны для так называемых пирсовых систем 107а-107е и т.д., и с обеих сторон для промежуточных систем 7а-7е и т.д., и для головных систем 207а-207е и т.д. Прибывающие в портовый бассейн суда смогут, таким образом, если понадобится, временно швартоваться к наружным сторонам этих последних (в позициях ожидания).
Все плавучие подвижные системы - пирсовые, промежуточные и головные - присоединены в своей центральной зоне к соответствующим швартовным понтонным секциям. Высоту (надводный борт) этих систем относительно уровня воды можно менять с учетом высоты существующих понтонов.
Каждая из всех этих систем, за исключением пирсовых понтонов, содержит продольный проем, через который проходит причальный пал 8. Они перемещаются вдоль своей продольной оси из положения, в котором причальный пал 8 находится на одном из концов проема, в другое положение, в котором он находится на другом конце. Два наружных конца плавучей системы, охватываемые и охватывающие, обозначены позициями 9А, 10А; 9В, 10В; 9С, 10С; 9D, 10D соответственно для каждой из систем 7а, 7b, 7c, 7d и т.д.
Швартовные траверсы 6 типа мостков короче половин систем 7а-7е и т.д.; 107а-107е и т.д.; 207а-207е и т.д., которые имеют все одинаковую длину. Эти последние, по сути дела, выполнены с возможностью взаимодействия друг с другом своими концами 9В, 10А; 9с, 10В; 10С, 9D, образуя при этом ряды подвижных систем, параллельных пирсу 1 (фиг.1 и 2). Подобным же образом концы 9А будут взаимодействовать с концами швартовных траверс 4', снабженных средствами 10 (такими же, как средства 10А, 10В и т.д.), обеспечивая усиление монолитности комплекса и повышение его стойкости к воздействию неблагоприятных погодных условий.
Концы пирсовых подвижных систем также снабжены охватываемыми/ охватывающими соединительными средствами 9А', 9В' и т.д., 10А', 10В' и т.д., причем конец 9А' первого элемента 107а упирается в соединительную деталь 10' того же типа, закрепленную на неподвижном понтоне 3.
В рассматриваемом здесь примере (фиг.1 и 2) пространства, оставленные для судов, имеют с разных сторон от бонов разные размеры. Само собой разумеется, что можно было бы предусмотреть и пространства одинаковой длины. Места для судов различных категорий можно организовать каким угодно образом. Размещаемые в этих местах траверсы типа мостков тоже имеют разные длины по тем же причинам.
На фиг.1 боны 4A-4D находятся в замкнутом положении, когда они скреплены друг с другом противолежащими концами разных плавучих подвижных систем 7. Разомкнута только одна сторона бона 4. На фиг.2 пространство между бонами 4В и 4С разомкнуто. Таким образом, имеется возможность маневрирования судов, в зависимости от конкретных обстоятельств, в пространстве между неподвижным боном 4 (фиг.1) и боном 4А, а также между бонами 4В и 4С (фиг.2).
Во всех возможных случаях концы 9 или 10 подвижных систем в разомкнутом положении упираются в причальный пал, благодаря чему комплекс становится жестким даже в неблагоприятных атмосферных условиях, при этом второй конец системы сцеплен с находящимся напротив него концом, который, в свою очередь, упирается в другой причальный пал.
На фиг.3-5 приведен вид сверху плавучей подвижной системы (7b бона 4В) по фиг.1 и 2 в трех разных положениях относительно связанного с ней причального пала 8.
Ниже применительно к фиг.8 раскрыта конструкция этой системы 7b, причем та же конструкция использована и для остальных систем - 7а, 7с и 7d.
Подвижная система 7 образована двумя металлическими балками 11 и 11', которые параллельны друг другу и отстоят друг от друга, что позволяет создать проход для связанного с ними причального пала 8 и охватывающей этот пал каретки 12, назначение которой разъясняется далее. Каждая из балок состоит из двух параллельных профилей 11А, 11В; 11'А, 11'В прямоугольного сечения, соединенных стяжками 11С. Внутренний профиль (11А; 11'А) каждой из балок имеет на своей свободной боковой поверхности, обращенной ко второй поверхности, частично перекрытое отверстие, образуя таким образом рельс (обозначен позициями 11А; 11'А).
Наружные профили 11В, 11'В снабжены в нескольких местах утками Т для швартовки судов, а также боковыми защитными кранцами D.
Каждая плавучая подвижная система 7 содержит поплавки F, помещенные под балками 11, 11' по обе стороны от пространства, обеспечивающего прохождение причального пала 8 во время перемещения указанной системы (типа катамарана). Эти поплавки F выполнены в виде обычных блоков (из закачанной в пластмассовую оболочку пены). Они могут также иметь форму надувных кранцев F1, типа изображенных на фиг.14. В этом случае достигается то преимущество, что они выступают за пределы конструкции систем 7, обеспечивая при необходимости поглощение ударов от столкновения с судами.
Для того чтобы повысить жесткость каждой плавучей подвижной системы 7, на ее концах 9 и 10 размещены металлические усиливающие конструкци 13А, 13В (фиг.3-6), и, кроме того, как видно среди прочего на фиг.10, от одного рельса 11А к другому (11'А) проходят распорки 14, которые могут убираться посредством поворота в рельсе, как будет разъяснено далее.
За пределами пространства, находящегося между рельсами 11А и 11'А, система 7 покрыта настилом 15, традиционным для кораблестроительной промышленности.
Кроме сказанного, между рельсами 11А и 11'А и по обе стороны от каретки 12, охватывающей причальный пал 8, пространство перекрыто, из соображений безопасности для пользователей, сматываемой решеткой 16А (слева от каретки 12 на фиг.3-5) и 16В (справа), которая наматывается и разматывается (как будет показано ниже) с обеих сторон причального пала 8 в зависимости от перемещения системы 7 относительно этого последнего. Указанное наматывание/разматывание рассчитано таким образом, что центральное пространство системы 7 оказывается всегда перекрытым (за пределами пространства, занятого кареткой 12) решеткой, обеспечивающей возможность прохода для пользователей.
Для того чтобы укрепить соединение между плавучей подвижной системой 7b и боновой секцией 5, предусмотрены также элементы жесткости 18 и 18' трапецеидальной формы, которые расширяют систему 7 в зоне этого соединения.
Плавучая подвижная система 7 взаимодействует с двумя швартовными боновыми секциями 5 по обе стороны от нее через посредство специальной соединительной системы соответственно 18А, 18'А, которая закреплена на наружных свободных кромках элементов жесткости 18 и 18', что показано более четко на фиг.9, будучи выполнена в виде, например, шарнирных проушин, в результате чего обеспечивается, с одной стороны, приспособляемость к любым изготавливаемым в настоящее время понтонам и, с другой стороны, незначительное смещение вокруг горизонтальной оси соединения 18А, 18'А с учетом движений водного зеркала.
На нижней поверхности платформ 18, 18' предусмотрены горизонтальные триангуляционные силовые цилиндры 17, рабочие органы (цилиндры) которых обозначены позициями 17А, 17'А, а поршни-штоки - позициями 17В, 17В', причем цилиндры 17А, 17'А могут быть прикреплены любыми средствами к соответствующей платформе (каждый внутри трапеции).
В выдвинутом состоянии штоки поршней занимают положения, показанные в правой части фиг.9, образуя при этом усиливающие кронштейны, концы которых зажаты в глухих отверстиях 28, 28', предусмотренных для этого в противоположном рельсе.
Вдоль рельса 11'А располагаются датчики 17С1, 17С2, 17С3, 17С4, при этом датчики 17C1 и 17С2 находятся по обе стороны от точки пересечения выдвинутых штоков 17В, расположенных на фиг.9 слева, а датчики 17С3 и 17С4 - по обе стороны от точки пересечения выдвинутых штоков 17В, расположенных справа.
Когда каретка 12 приходит в соприкосновение с датчиками 17C1 или 17С4, в зависимости от направления перемещения системы штоки 17В силовых цилиндров 17 убираются внутрь, оставляя место для прохождения каретки, и снова выдвигаются при соприкосновении каретки 12 с датчиками 17C2 или 17С3, в зависимости от направления перемещения системы, после прохождения каретки.
Можно также предусмотреть выполнение плавучих подвижных систем состоящими из трех модульных частей, а именно одной центральной части, имеющей трапецеидальные элементы жесткости, и двух одинаковых боковых частей, которые могут иметь разные длины и на концах которых имеются соответствующие охватываемые и охватывающие соединительные элементы. Места соединения указанной центральной части с боковыми частями обозначены на фиг.9 буквой J. Это соединения того же типа, что и соединения 18А и 18'А.
При сборке системы 7 выполняют соединение ее левой и правой частей с центральной частью после того, как они были разделены для целей транспортировки от места изготовления к портовому бассейну. Центральная часть 11D, 11'D рельсов 11А и 11'А выполнена съемной, с тем чтобы обеспечить возможность установки каретки 12 и ее техобслуживания (см. также фиг.13).
В положении, показанном на фиг.3, охватывающий конец 10В системы 7b прикреплен к охватываемому концу 9С системы 7с, а причальный пал 8 упирается в систему 7b рядом с ее охватываемым концом 9В, при этом решетка 16А намотана, решетка 16В полностью размотана, и проход между бонами 4А и 4В открыт. В положении, показанном на фиг.4, происходит перемещение системы 7b, при этом ее концы 9В и 10В свободны, а решетки 16А и 16В частично намотаны (или размотаны). В положении, показанном на фиг.5, система 7b прикреплена к концу 10А соседней системы 7а, при этом решетки 16А, 16В находятся в положениях, противоположных показанным на фиг.3, и проход между бонами 4В и 4С открыт.
Каретка 12 плавучей подвижной системы 7, охватывающая причальный пал 8, обеспечивает направленное перемещение этой системы 7, взаимодействуя с рельсами 11А и 11'А.
Целесообразно установить центральную верхнюю часть 11D, 11'D рельсов 11А и 11'А (фиг.9 и 13) с возможностью поворота, с тем чтобы обеспечить раскрытие этих последних, когда необходимо провести обслуживание каретки 12.
Каретка 12 образована квадратной рамой из металлического профиля, имеющей на сторонах, находящихся напротив рельсов 11А и 11'А, боковые подвижные системы - горизонтальные 24 и вертикальные 25, которые обеспечивают возможность ее перемещения внутри рельсов 11А и 11'А, сохраняя между ними постоянное расстояние.
В каждом из четырех внутренних углов каретки 12 и в середине ее четырех сторон имеются горизонтальные опорные ролики 26, дающие каретке возможность свободно скользить вдоль по вертикали вдоль причального пала 8, что позволяет традиционным образом отслеживать движение воды в период приливов и отливов. Ролики 26 установлены на пружинах 26', благодаря чему удается амортизировать боковые движения каретки 12 вокруг причального пала 8 и компенсировать допуски на изготовление причальных палов.
В наружной верхней части каретки 12, со стороны рельсов, закреплена металлическая конструкция 53, на которой установлены оси 23А и 23В для наматывания решеток 16А, 16В, причем указанные оси расположены перпендикулярно рельсам по обе стороны от каретки 12. На конструкции 53 закреплены также оси двух роликов 54, служащих для прижима решеток 16А, 16В к зажимным зубчатым фиксаторам 36, 36', помещенным в верхней части рельсов 11А, 11'А. Следующие друг за другом зубья 55 зажимных зубчатых фиксаторов 36, 36' видны более наглядно на фиг.18. Они обеспечивают удержание решетки в нужном положении.
Решетки образованы рядом небольших удлиненных деталей 37 (фиг.21), расположенных в зависимости от длины рельсов 11А и 11'А. Эти детали 37 ограничены двумя противоположными боковыми продолговатыми поверхностями, в собранном состоянии расположены вертикально и в шахматном порядке. В каждой детали 37 высверлены по два поперечных отверстия, перпендикулярных к продолговатым поверхностям, причем через находящиеся напротив друг друга отверстия пропущены оси 38. Благодаря такому исполнению образуется своего рода ленточный конвейер гусеничного типа. На концах осей 38 насажены небольшие зажимные цилиндры 37', которые могут быть зажаты в зубчатых фиксаторах 36, 36'.
На наружной поверхности каретки 12, в середине ее краев, перпендикулярных к рельсам, и в верхней части имеются губки 30, 30', например насадки типа Norseman, которые захватывают трос 21 (его два конца, отходящие от каретки, обозначены позициями 21А, 21В), проходящий по шкивам 20A1, 20B1 с вертикальными осями (шкив 20A1 - ведущий и шкив 20B1 - холостой), находящимся под настилом 15 у соответствующих концов системы 7.
На фиг.22 и 23 можно видеть, что шкив 20A1 приводится в движение моторно-редукторным узлом 19/19', а на фиг.24 и 25 видно, что холостой шкив 20B1 соединен с пружиной 57, что обеспечивает амортизацию тягового усилия, воздействующего на трос 21, приводимый в движение шкивами.
Трос 21, который проходит по средней продольной линии пространства хода причального пала 8, поддерживается распорками 14, которые снабжены для этой цели предусмотренными по всей их длине вращающимися оболочками 14а (фиг.12 и 13). Возвратный конец троса 21, обозначенный позицией 22 (фиг.8 и 14), проходит внутри балки 11В. Как можно видеть на фиг.14, возвратный конец 22 троса поддерживается холостыми шкивами 27, оси которых закреплены на балке 11В. На фиг.20 показано, что за пределами системы имеется трос 21, поддерживаемый шкивом 27, оси которого вставлены в проушины 27', прикрепленные к внутренней структуре системы 7.
Как показано на фиг.20, решетка 16А, 16В прикреплена с помощью крепежных крюков соответственно 31А, 31В (обозначаются также позицией 31) к конструкции настила 15 по обеим концам подвижной системы 7.
С обеих сторон причального пала 8, как уже говорилось выше, каждая решетка 16А, 16В наматывается или разматывается вокруг своей оси 23А, 23В, причем обе оси жестко связаны друг с другом с помощью двух приводных цепей 40, которые наматываются вокруг той же ступицы, что и решетки 16А, 16В, а намотанные участки цепей удерживаются внутренними щеками 20В3; 20'В3 - 23В3; 23'В3 и наружными щеками 20В2; 20'В2 - 23В2; 23'В2.
Предусмотрено такое размещение решеток 16А, 16В и цепей 40, 40' на указанных выше осях 23А, 23В, при котором разматывание одной решетки приводит к наматыванию цепи, находящейся на той же оси, которая разматывается со своей второй оси, вызывая, в свою очередь, наматывание второй решетки, так что скорости разматывания и наматывания обеих решеток идеально синхронны. Процесс разматывания управляется натяжением троса 21, который, в свою очередь, приводится в движение от двигателя 19. При включении двигателя 19 происходит вращение приводного шкива 20A1, что приводит к перемещению троса 21, который, будучи прикреплен к каретке 12, создает поступательное перемещение комплекса плавучей подвижной системы относительно причального пала 8.
Узел, состоящий из двух осей 23А, 23В и цепей 40, 40', закрыт кожухом С; прикрепленные к основанию кожуха С датчики 52 обеспечивают возможность прекращения продвижения системы, если в процессе перемещения подвижной системы относительно кожуха между решеткой и кожухом застрял какой-либо инородный предмет.
На фиг.10 приведен вид сверху, иллюстрирующий каретку 12 и поворотную распорку 14 подвижной системы 7. Распорки 14 имеют возможность горизонтального поворота при прохождении каретки 12, когда эта последняя толкает их, и возвращаются на свое место под действием силовых цилиндров 35 после прохождения каретки 12, когда они блокируются в противоположном рельсе. Они установлены поочередно через определенные промежутки на одном из рельсов 11А и на втором 11′А.
В левой части фиг.10 можно видеть систему 7, рельсы 11А и 11'А которой поддерживаются этими поворотными распорками 14, которые поворачиваются вокруг одного из своих концов 32, поочередно устанавливаемых в рельсе 11А или 11'А. Свободные концы 33 распорок 14, которые более детально показаны на фиг.12 и 13, снабжены оконечной частью в виде небольшого цилиндра качения, свободно установленного на оси с одной стороны от распорки 14 и перпендикулярно к ней.
В левой части фиг.11 можно видеть, что в рельсе 11'А выполнены отверстия, или прорези, 34А, имеющие, по существу, форму перевернутой буквы U, сердцевина которых параллельна настилу 15, а ветви имеют очень большую ширину, что обеспечивает возможность прохождения свободного конца 33.
На заднюю сторону этих отверстий 34А с целью их перекрытия и обеспечения качения свободных концов 33 выведены круглые короба 34 типа схематично показанных на фиг.12 и 13.
В правой части фиг.10 (где показаны только каретка 12 и центральные участки 21А, 21В тросов) можно видеть, что края 12А, 12В указанной каретки 12, перпендикулярные к рельсам 11А, 11'А, закруглены в направлении наружной стороны каретки.
В процессе эксплуатации распорки 14 поочередно сталкиваются с противоположным краем 12А или 12В, вследствие чего происходит их отвод посредством поворота; вертикальная цилиндрическая оконечная часть конца 33 может выйти из рельса 11'А через одну из широких вертикальных ветвей отверстия 34А в виде перевернутой буквы U. При этом распорка 14 переворачивается, устанавливаясь параллельно рельсу 11А, как показано на фиг.12 штрихпунктирными линиями.
Когда распорка 14 уже не удерживается кареткой 12, она оттягивается назад силовым цилиндром 35 (фиг.12 и 13), который снова устанавливает ее в исходное положение, сохраняя интервал между двумя рельсами 11А и 11'А, то есть в положение, в котором цилиндрическая оконечная часть свободного конца 33 удерживается в коробе 34 горизонтальной частью отверстия 34А, препятствуя таким образом схождению или расхождению рельсов 11А и 11'А.
На фиг.8, где представлен вид системы 7 в перспективе, показан соединительный конец 9, который будет детально описан ниже при рассмотрении фиг.39-41, где показано соединение между собой двух соседних подвижных систем 7а и 7b соответственно охватываемым концом 9В и охватывающим концом 10А.
На охватываемом конце 9В предусмотрены выступающие элементы 47, взаимодействующие с полостями 48 охватывающего конца 10А. Боковые поверхности 48А выступающих элементов 47, ограничивающие полости 48, дают выступающим элементам 47 возможность легко входить в полости 48 через более широкую входную зону. Действительно, можно видеть, что подвижные системы 7а и 7b могут быть сведены в процессе не идеально прямолинейного перемещения, обусловленного движениями водного зеркала.
В выступающих элементах 47 охватываемого конца 9В выполнено горизонтальное отверстие 49, перпендикулярное к поверхностям 48А. Подобным же образом в каждом из выступающих элементов 47 охватывающего конца 10А выполнено по горизонтальному отверстию, в которое входит палец 50, который выступает за пределы боковых поверхностей 48А и может выходить из своего гнезда, обеспечивая при этом механическую и/или электромагнитную блокировку концов 9В и 10А подвижных систем 7b и 7а сразу после того, как выступающий элемент 47 вошел в полость 48.
Передние поверхности выступающих элементов 47 и днища полостей 48 имеют криволинейную форму, обеспечивая для соединенных систем возможность поворота вокруг оси пальца 50, с тем чтобы подвижные системы 7 могли перемещаться с учетом движений водного зеркала (фиг.41).
Охватываемый конец 9 подвижных элементов выполнен с возможностью незначительного перемещения посредством бокового скольжения с одной или другой стороны, будучи приводим в действие двигателем 44' (фиг.41), работа которого управляется путем лазерного наведения с целью компенсации допусков на выравнивание (движения водного зеркала), что позволяет добиться идеального перекрытия двух систем на последних метрах перед их сцеплением.
Предусмотрены специальные средства 51′′ лазерного или другого светового наведения, способствующие надежному выравниванию двух концов 9 и 10 в процессе их сближения.
На концах 9 и 10 систем 7, а также справа в местах соединения 18А боновых секций 5 имеются сигнальные огни 51, зажигающиеся в момент приведения в движение систем 7 для предупреждения пользователей.
На боковых кромках концов 9В и 10А предусмотрены световые огни 51', традиционно зеленые или красные, которые указывают путь судам, совершающим маневры в ночное время.
Исходя из соображений безопасности можно предусмотреть на концах 9В и 10А датчики 52, которые будут обнаруживать возможное наличие инородного для системы предмета в процессе их сближения, препятствуя в этот момент соединению двух понтонов для предотвращения несчастных случаев.
На фиг.36-38 проиллюстрировано выполнение соединения между пирсовой подвижной системой 107 и неподвижным плавучим понтоном 3.
В соответствии с этим вариантом осуществления неподвижный плавучий понтон 3 прикреплен через посредство обычных ползунов 43 к первому ряду причальных палов 8'', находящемуся между неподвижным пирсом 1 и традиционным плавучим понтоном 3. Пирсовая подвижная система 107 не пересекается причальным палом 8 и не требует применения системы сматываемых решеток. Она содержит простую балку 211, выполняющую роль швартовной траверсы, которая помещена на ряде поплавков F или закреплена на понтоне 3 и накрыта настилом 15. Балка 211 снабжена частично закрытым рельсом-балкой типа направляющих рельсов кареток 12 систем 7, который передвигается по узлам 42, включающим в себя вертикальные 25 и горизонтальные 24 колеса. Эти узлы 42 установлены через равные промежутки на боковой поверхности неподвижного понтона 3 благодаря шарнирным креплениям 41, что позволяет совершать перемещения с учетом движений водного зеркала (фиг.38). Перемещение так называемых головных систем 107 вбок относительно неподвижного понтона 3 обеспечивается одним или несколькими зубчатыми колесами 45, которые взаимодействуют с рельсом 46 с зубчатыми выемками, закрепленным на понтоне 3. Пирсовая подвижная система 107 оборудована в середине двигателем 44, который помещен под ее настилом 15 и для приведения системы в движение приводит в движение зубчатое колесо 45, взаимодействующее с рельсом 46 с зубчатыми выемками, находящимся на боковой поверхности понтона 3.
На фиг.36 в уменьшенном масштабе показан узел, образованный пирсовой подвижной системой 107 и обычным плавучим понтоном 3, в зоне соединения с боновой секцией 5 и ее торцевыми соединительными концами 9' и 10'. Эти концы 9' и 10' соответствуют половинам концов 9 и 10 систем 7.
Двигатели перемещения (19; 44) и средства сцепления и расцепления (9-10; 9'-10') концов систем (7-207; 107) получают одновременное управление от бона или группы бонов, в зависимости от конкретных потребностей, с использованием любых специальных средств, в частности централизованных и компьютеризованных.
Так, можно предусмотреть пульт управления и контроля с дисплеем в конторе начальника порта (S1 на фиг.42), что позволит эксплуатационному персоналу выполнять маневры открытия по запросам пользователей (по телефону или по радио), намеревающихся зайти в порт или выйти из него, при этом можно предусмотреть программирование команд на открытие и закрытие каждого из бонов в определенное время. Можно также использовать вспомогательные шкафы (А1, А2, A3 и т.д.) для объединения средств управления и автоматики каждого бона, в которые будут включены устройства аварийного выключения, устанавливаемые напротив каждого бона на неподвижном понтоне 3 или пирсе 1.
Кроме того, можно предусмотреть автоматизацию команд по запросу пользователей непосредственно с пирса 1 или понтона 3, для чего можно будет использовать средства типа монетного автомата или карт для расчетов.
Необходимо предусмотреть экстренное раскрытие бонов на случай пожара для предотвращения распространения пламени, а на самих бонах установить средства пожаротушения, при этом персонал должен иметь возможность поперечного прохода по элементам 7, с тем чтобы как можно быстрее добраться до очага возгорания.
В случае повреждения какого-либо движущего или механического органа одной из систем 7, 207, 107 можно будет отсоединить неисправный орган, при этом комплекс системы согласно изобретению будет оставаться в функциональном состоянии благодаря тому, что дефектная система будет отбуксирована другими подвижными элементами 7, 207, 107 на время до вмешательства обслуживающего персонала.
Детальное изложение предлагаемых средств помогает уяснить функционирование оборудованного такими средствами портового бассейна посредством маневрирования боном или группой смежных бонов, связанных между собой концами систем согласно изобретению. В результате удается получить существенный выигрыш в свободном пространстве для швартовки судов.
К этому следует добавить, что при использовании швартовного комплекса в соответствии с изобретением швартовка судов осуществляется исключительно на боновых секциях 5 и, одновременно, на швартовных траверсах 6 и концах плавучих подвижных систем 7.
Как уже упоминалось, системы 7 обладают тем преимуществом, что становятся возможными поперечные связи, обеспечивающие легкое перемещение пользователей от одного бона к другому.
Ниже описываются различные возможные модификации рассмотренного выше варианта осуществления.
На фиг.26 и 27 иллюстрируется одна из разновидностей первого варианта осуществления по фиг.24 и 25, в соответствии с которой система получает направленное перемещение не от одного, а от двух спаренных причальных палов 8, что позволяет добиться лучшего удержания (для зон, в большей степени подверженных воздействию непогоды или рассчитанных на прием более крупных судов). Каждый из причальных палов 8 снабжен собственной кареткой 12, при этом две каретки соединены между собой шарнирным соединительным устройством 12С, которое обеспечивает возможность относительного перемещения этих кареток. Концы каждого из тяговых тросов 21А, 21В прикреплены к одной из кареток 12.
Опорная конструкция 53 для наматывания решеток 16А, 16В рассчитана на совместную работу с обеими каретками 12. Кроме того, кожух С удлинен таким образом, чтобы можно было перекрыть весь механизм; в верхней части выполнены также два отверстия, обеспечивающие прохождение головных частей причальных палов 8.
На фиг.28 и 29 иллюстрируется второй вариант осуществления устройства перемещения систем 7, 207, в соответствии с которым тяговый трос не используется. Имеется двигатель 19, установленный на опорную конструкцию 53, жестко связанную с кареткой 12; этот двигатель, действуя через редуктор 19', приводит во вращение два боковых зубчатых колеса 45, 45', каждое из которых зацепляется с зубчатым фиксатором 36, 36' для зажима решеток типа, описанного выше применительно к первому варианту осуществления. При включении двигателя 19 происходит поворот колес 45, 45', которые, приводя в действие связанные с ними зубчатые фиксаторы 36, 36', перемещают систему 7.
При использовании этого варианта осуществления целесообразно предусмотреть специальную систему, обеспечивающую возможность раскатывания и складывания кабеля питания двигателя 19.
На фиг.30 и 31 иллюстрируется этот второй вариант осуществления с использованием той же модификации с двумя причальными палами, что и на фиг.26 и 27. В данном случае двигатель 19 расположен предпочтительно между двумя причальными палами 8.
На фиг.32 и 33 показан вариант защиты центрального проема систем 7, 207, согласно которому применение сматываемых решеток не предусмотрено. Вместо этого защита обеспечивается благодаря ограждению G, располагающемуся вокруг зоны поступательного перемещения причального пала 8 внутри системы 7. По оси боновых секций 5 выполнена зона прохода с помощью специальных подъемных мостков 16, образованных, например, перекрывающимися элементами 16С, 16D (фиг.4, 33 и 34), которые в откинутом положении служат также для поддержания интервала между рельсами 11А и 11'В, причем их концы специально рассчитаны на такую работу, обеспечивая в приподнятом положении сохранение неразрывности ограждения G.
На фиг.33 буквами SE обозначен уровень поверхности воды.
При перемещении системы 7, 207 на уровне причального пала 8 мостки 16 меняют свое закрытое положение (фиг.35) на открытое (фиг.34). Две части 16С, 16D этих мостков приводятся в действие от подъемных силовых цилиндров 35' (фиг.33).
Для обеспечения защиты обеих сторон мостков 16 в откинутом положении (фиг.35) противолежащие оконечные элементы каждых мостков 16С, 16D также снабжены ограждением G'.
На фиг.35 изображены съемные решетки 16Е, предназначенные для перекрытия проема между двумя рельсами 11А, 11'А на время проведения таких мероприятий, как плавучие салоны, судостроительные выставки и пр. В этих случаях системы 7 приводятся в нерабочее состояние, а ограждения G, которые предпочтительнее выполнять съемными, убираются.
Очевидно, что описанные выше варианты осуществления следует рассматривать лишь как наглядные примеры, не имеющие ограничительного характера, так что возможно внесение любых изменений при условии сохранения объема изобретения. Так, в частности, в качестве механизма, обеспечивающего перемещение плавучей подвижной системы, можно также использовать:
- перемещение, создаваемое в результате вращения также приводимого в действие от электродвигателя и располагающегося на одном из концов каждой плавучей подвижной системы шнека внутри двух направляющих рельсов;
- перемещение, создаваемое телескопическими силовыми гидроцилиндрами;
- перемещение, создаваемое в результате реверсирования направления вращения гребных винтов, помещенных над поплавками центральных частей, благодаря чему обеспечиваются движения элементов в том или ином направлении; вращение этих винтов, которые на время простоев могут складываться и извлекаться из воды, может также обеспечиваться электродвигателями;
- вращение гребных колес, находящихся под соединительными деталями на каждом конце плавучих систем.
Можно также сделать так, чтобы решетки 16А, 16В наматывались не рядом с каретками, а на соответствующем конце плавучей подвижной системы согласно изобретению, под ее настилом, при этом в центральной части будут сохранены системы синхронизирующих цепей.
Кроме того, распорки 14 могут быть размещены таким образом, чтобы они могли скользить параллельно сами себе на одном из концов плавучей подвижной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УДЕРЖАНИЯ ЛОДОК, НАХОДЯЩИХСЯ НА ПЛАВУ В ВОДОЕМЕ, ПОСЛЕ ИХ СПУСКА И/ИЛИ ПЕРЕД ИХ ПОДЪЕМОМ | 2015 |
|
RU2659189C2 |
| Устройство для швартования объектов в открытом море | 1982 |
|
SU1102623A1 |
| Причально-наводочное устройство для поперечного перемещения плавучих средств | 1980 |
|
SU894055A1 |
| УЛУЧШЕННАЯ ОТСОЕДИНЯЕМАЯ ПЛАВУЧАЯ ШВАРТОВНАЯ СИСТЕМА С ТУРЕЛЬЮ | 2006 |
|
RU2412080C2 |
| ПЛАВУЧИЙ ВЕРТОЛЕТНЫЙ ВЗЛЕТНО-ПОСАДОЧНЫЙ И ПРИЧАЛЬНЫЙ КОМПЕКС | 2008 |
|
RU2369518C1 |
| ШВАРТОВОЕ ПРИЧАЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2734644C1 |
| УСТРОЙСТВО ДЛЯ ШВАРТОВКИ СУДОВ к ПЛАВБАЗАМ В ОТКРЫТОМ МОРЕ | 1964 |
|
SU166888A1 |
| Плавучий причал для погрузкиразгрузки судов | 1978 |
|
SU722473A3 |
| Устройство для швартовки судов | 1979 |
|
SU1028556A1 |
| Устройство для наводки судов на ось шлюза | 1982 |
|
SU998647A1 |
Изобретение относится к плавучим понтонам, используемым для швартовки судов и шлюпок, в частности парусных или моторных прогулочных катеров и шлюпок, в морских и речных портах, а также на различных водных путях. Комплекс состоит из механизированных плавучих подвижных систем для перемещения бонов для швартовки судов и шлюпок в портовых бассейнах с обеспечением поступательного перемещения указанных бонов по перпендикулярной к ним траектории таким образом, чтобы оставалось пространство для маневрирования судов и шлюпок между, по меньшей мере, двумя смежными бонами, тогда как остальные пространства между бонами закрыты для маневрирования. Каждая система содержит средства крепления бонов или боновых секций, причем указанные боны или боновые секции расположены перпендикулярно к направлению поступательного перемещения; размещенные на обоих ее концах средства, обеспечивающие ее соединение с такой же системой, находящейся напротив нее, или с соединительным средством, находящимся на конце пирса или неподвижного бона; средства обеспечения направленного поступательного перемещения параллельно пирсу или основному понтону относительно некоторого неподвижного пункта, каковым является свая или причальный пал либо группа свай или причальных палов, вбитых в дно бассейна, причем указанные неподвижные пункты указанного комплекса установлены в виде правильной сетки с осями, перпендикулярными и параллельными указанному пирсу или основному понтону, и с размером ячеек, позволяющим совершать указанное маневрирование бона или группы смежных бонов, сцепленных своими концами; системы, управляемые неподвижным понтоном; средства приведения бонов в поступательное перемещение, причем указанные средства привода указанного комплекса получают управление от средств синхронизированного управления вышеупомянутым маневрированием. Изобретение обеспечивает возможность поддержания бонов значительной длины в перпендикулярном положении относительно основных пирсов при воздействии ветра. 2 н. и 15 з.п. ф-лы, 42 ил.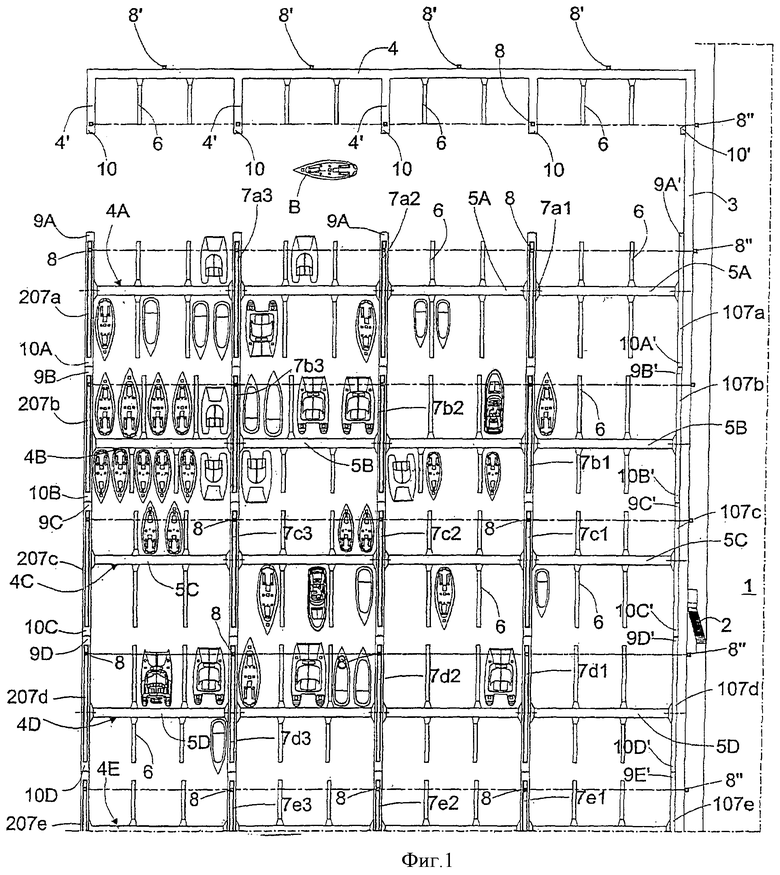
1. Комплекс механизированных плавучих подвижных систем (7; 107; 207) для перемещения бонов (4А-4Е) для швартовки судов В и шлюпок в портовых бассейнах Р с обеспечением поступательного перемещения указанных бонов (4А-4Е) по перпендикулярной к ним траектории таким образом, чтобы оставалось пространство для маневрирования судов В и шлюпок между, по меньшей мере, двумя смежными бонами (4, 4А-4Е), тогда как остальные пространства между бонами закрыты для маневрирования, причем каждая система содержит:
средства крепления бонов или боновых секций (5), причем указанные боны или боновые секции расположены перпендикулярно к направлению поступательного перемещения;
размещенные на обоих ее концах средства (9, 10), обеспечивающие ее соединение с такой же системой, находящейся напротив нее, или с соединительным средством, находящимся на конце пирса или неподвижного бона;
средства обеспечения направленного поступательного перемещения параллельно пирсу или основному понтону относительно некоторого неподвижного пункта, каковым является свая или причальный пал (8) либо группа свай или причальных палов, вбитых в дно бассейна, причем указанные неподвижные пункты указанного комплекса установлены в виде правильной сетки с осями, перпендикулярными и параллельными указанному пирсу или основному понтону и с размером ячеек, позволяющим совершать указанное маневрирование бона или группы смежных бонов, сцепленных своими концами, системы (107), управляемые неподвижным понтоном (7);
средства приведения бонов в поступательное перемещение, причем указанные средства привода указанного комплекса получают управление от средств синхронизированного управления вышеупомянутым маневрированием.
2. Комплекс по п.1, отличающийся тем, что на концах плавучих подвижных систем имеются средства швартовки, образующие швартовные траверсы.
3. Комплекс по любому из п.1 или 2, отличающийся тем, что системы установлены таким образом, что в положении остановки они всегда упираются одним концом в причальную сваю или пал (8), а на другом конце скреплены с концом такой же находящейся напротив системы или с концом неподвижного понтона или пирса, при этом концы указанной такой же системы или неподвижного понтона упираются в другую причальную сваю или пал (8).
4. Комплекс по п.1, отличающийся тем, что содержит средства (9, 10), предназначенные для соединения и разъединения двух смежных бонов, обеспечивающие их надежное сцепление, способное противостоять воздействию неблагоприятных метеорологических условий с учетом движений воды и приливов-отливов.
5. Комплекс по п.1, отличающийся тем, что средства обеспечения направленного перемещения плавучей подвижной системы образованы кареткой (12), охватывающей причальный пал (8) и образующей ползун, имеющий возможность подъема и опускания вдоль причального пала (8) с учетом движения воды или приливов-отливов, причем указанная каретка имеет снаружи приводные колеса (24, 25), установленные с возможностью взаимодействия с рельсами (11А, 11′А) плавучей подвижной системы.
6. Комплекс по п.5, отличающийся тем, что для придания движения каждой плавучей подвижной системе (7) имеется, по меньшей мере, один трос (21), присоединенный к каретке (12) с двух противоположных сторон (12А, 12В), перпендикулярных рельсам (11А, 11′А), установленный с возможностью натягивания с помощью двигателя (19) так, что натяжение троса, связанного с одной из сторон, обеспечивает скольжение плавучей подвижной конструкции в направлении, противоположном натяжению, создаваемому тросом.
7. Комплекс по п.5, отличающийся тем, что установленный на каретке (12) двигатель (19) приводит в действие одно или два зубчатых колеса (45), передвигающиеся по одному или двум зубчатым фиксаторам (36) таким образом, что это движение приводит к перемещению плавучей подвижной системы в одну или другую сторону.
8. Комплекс по любому из пп.5-7, отличающийся тем, что плавучая подвижная система содержит удлиненную опорную конструкцию с двумя противолежащими балками (11, 11′), на внутренней стороне которых закреплены рельсы (11А, 11′А), имеющие возможность взаимодействия с приводными колесами (24, 25) каретки (12) причального пала (8), причем указанные балки (11, 11′) соединены на концах с помощью соединительных конструкций (13В, 13С), причем указанные балки и, в случае необходимости, соединительные конструкции расположены на, по меньшей мере, одном поплавке (F, F1), на указанных балках имеются средства (18, 18′), обеспечивающие их соединение с боном или с боновыми секциями, с усилением с правой стороны от указанного соединения с помощью триангуляционных силовых цилиндров (17), на концах указанной конструкции имеются соединительные средства, являющиеся ответными для средств, установленных на смежной плавучей подвижной системе, что позволяет формировать цепочки соединенных плавучих подвижных систем.
9. Комплекс по п.8, отличающийся тем, что оба пространства между обоими рельсами (11А, 11′А) по обе стороны от каретки (12), связанной с причальным палом (8), закрыты решеткой (16А, 16В), выполненной с возможностью наматываться и разматываться с любой стороны от каретки в зависимости от перемещения плавучей подвижной системы относительно причального пала (8), причем предусмотрен пешеходный настил (15), перекрывающий конструкцию вокруг указанной решетки.
10. Комплекс по п.9, отличающийся тем, что предусмотрены средства для обеспечения разматывания или наматывания одной из решеток со скоростью, зависящей от разматывания и наматывания другой решетки.
11. Комплекс по п.10, отличающийся тем, что средства разматывания/наматывания одной из решеток относительно другой представляют собой, по меньшей мере, одну цепь (40), имеющую длину и толщину, пропорциональные соответственно длине и толщине разматываемой решетки, установленную с возможностью наматывания вокруг оси намотки первой решетки в направлении, обратном направлению ее наматывания, и на параллельную ось второй решетки также в обратном направлении таким образом, что после полного наматывания первой решетки на ее ось цепь (40) оказывается целиком размотанной с этой же оси и целиком намотанной на указанную вторую ось, причем вторая решетка полностью размотана, при этом указанная цепь приводится в движение в результате разматывания первой решетки, которую, в свою очередь, приводит в движение двигатель, обеспечивающий перемещение конструкции.
12. Комплекс по п.8, отличающийся тем, что защита центрального проема систем обеспечена ограждением (G), установленным вокруг зоны поступательного перемещения причального пала (8), причем по оси секций бонов имеется зона прохода, сформированная подъемным мостком (16С, 16D).
13. Комплекс по любому из пп.9-12, отличающийся тем, что между двумя рельсами (11А, 11′А) установлены распорки (14), выполненные с возможностью быть плавно убранными, когда в результате перемещения конструкции они оказываются близко к краю (12А, 12В) каретки, и служащие опорой для тягового троса.
14. Комплекс по любому из пп.1-2, 4-7 и 9-12, отличающийся тем, что каждый бон содержит несколько секций швартовных понтонов, присоединенных к плавучим подвижным системам (7а, 7b, 7c, 7d), и дополнен одной, так называемой, пирсовой плавучей подвижной системой (107а, 107b, 107с, 107d), имеющей возможность скольжения вдоль обычного неподвижного плавучего понтона (3), и одной, так называемой, головной плавучей подвижной системой (207а, 207b, 207c, 207d), находящейся на противоположном конце бона со стороны подхода судов и выполненной с возможностью работы в качестве понтона.
15. Комплекс по любому из пп.1-2, 4-7 и 9-11, отличающийся тем, что соединение между бонами или секциями бонов и подвижными системами выполнено в такой точке, чтобы обеспечить по обе стороны от бона по необходимости две одинаковых или разных длины для размещения судов В и шлюпок.
16. Комплекс по любому из пп.5-7 и 9-12, отличающийся тем, что каждый неподвижный пункт образован несколькими причальными палами, соответствующие каретки которых соединены с помощью шарнирного соединительного устройства.
17. Портовая установка, содержащая боны, выполненные с возможностью перемещения с помощью комплекса механизированных плавучих подвижных систем, раскрытых в любом из пп.1-16.
| СПОСОБ ИЗГОТОВЛЕНИЯ СТЕКЛОПЛАСТИКОВОГО ИЗДЕЛИЯ | 2003 |
|
RU2236716C1 |
| Плавучее причальное сооружение | 1939 |
|
SU65267A1 |
| US 3672178 А, 27.06.1972 | |||
| US 4342277 А, 03.08.1982 | |||
| US 3635181 А, 18.01.1972. | |||

