Изобретение относится к машиностроению, к устройствам для преобразования вращательного движения в поступательное перемещение и может применяться для различных исполнительных механизмов, в том числе и в качестве стеклоподъемников для автомобилей.
Известны различные конструкции устройств для преобразования вращательного движения в поступательное перемещение, используемые по этому назначению, например рычажные. Эти устройства, обладая определенными достоинствами, имеют и ряд недостатков, таких как большие, объемные габариты, вес и трудоемкость изготовления.
Известны устройства, основанные на перематывании тросика между двумя опорами. Эти устройства имеют меньший вес, но также требуют значительного пространства для своего размещения, к тому же тросики постоянно вытягиваются, неровно наматываются на барабан и запутываются. Для устранения этого приходиться вводить дополнительные приспособления, что усложняет и так достаточно сложную конструкцию таких устройств, повышает трудоемкость изготовления и снижает надежность их эксплуатации.
Перечисленные конструкции принципиально отличаются от предлагаемой и в дальнейшем не рассматриваются.
Известны устройства на основе пары шестерня-зубчатая рейка. Эти устройства известны достаточно широко и применяются в самых различных областях техники. Одной из рассматриваемых областей применения таких устройств является применение их в автомобилестроении в качестве стеклоподъемников.
Одно из таких устройств до недавнего времени изготавливалось предприятием «АКСИОН-ХОЛДИНГ» в г.Ижевске, которое близко по своей технической сущности к предлагаемому.
В этом устройстве, содержащем корпус, приводную шестерню и находящуюся с ней в зацеплении зубчатую рейку, рейка выполнена составной из звеньев, шарнирно соединенных между собой посредством штифтов, с возможностью поворота относительно друг друга и складывания в направлении зубчатой стороны. Рейка установлена в направляющих пазах корпуса и входит в зацепление с приводной шестерней.
Достоинством этого устройства является то, что при перемещении рейки и сокращении длины ее рабочего конца свободный ее конец не выдвигается в противоположную сторону, а складывается на 180 градусов и направляется в ту же сторону, что и рабочий конец, тем самым, сокращая возможные габариты устройства, как если бы рейка была жесткой.
Конструктивная сложность и нетехнологичность складной рейки связаны с необходимостью изготовления звеньев разной конфигурации и последующим их соединением и расклепкой штифтов. Для торможения и ограничения усилий в конце хода в этом устройстве имеются демпфирующие узлы - на рабочем и свободном концах рейки, необходимая жесткость пружин которых вызывает явление «отката», т.е. обратный отход стекла в конце рабочего хода. Для предотвращения этого явления в устройстве предусматриваются специальные приспособления, а все это - «лишние» детали, снижающие технологичность и повышающие трудоемкость изготовления.
Конструкция устройства требует изготовления двух исполнений - левого и правого, для левых и правых дверей соответственно. А это автоматически влечет за собой увеличение инструментального парка для изготовления деталей разного исполнения и другие сопутствующие сложности.
В самом ответственном месте - в области зацепления рейки с шестерней - между звеньями рейки и стенкой паза возникают значительные силы трения от воздействующих на рейку зубьев шестерни. В процессе работы материал контактирующих деталей в этом месте интенсивно истирается и, поскольку размеры зубьев невелики из-за стесненности габаритов, геометрия зацепления нарушается, и механизм быстро выходит из строя.
Для сложения и разворота свободного конца рейки на 180 градусов требуется значительное пространство, увеличивающее габариты и снижающее длину возможного рабочего хода. А это ограничивает применимость конструкции в автомобилях со стесненными пространственными возможностями внутри дверей.
Все эти и другие недостатки вынудили изготовителя отказаться от выпуска стеклоподъемников этой конструкции.
Известно устройство по заявке №2003118059/11 (018967), которое наиболее близко по своей технической сущности и которое принимается за прототип.
В этом устройстве, содержащем корпус с пазами, орган поступательного перемещения в виде ряда роликов с кольцевыми проточками и соединительным звеном приводимого объекта, размещенный в этих пазах, и орган вращательного движения в виде звездочки, установленной между этими пазами с возможностью зацепления с роликами, пазы выполнены в виде замкнутой фигуры, и ролики установлены вплотную по всей длине этой фигуры, а звездочка установлена так, что ее зубья в зоне зацепления входят в отверстия, образованные проточками двух рядом расположенных роликов.
К причинам, препятствующим достижению указанного ниже технического результата при использовании этого известного устройства, относятся следующие.
При работе устройства под нагрузкой ролики, изготовленные из упругого материала (пластмассы), в напорной ветви сжимаются и тем больше, чем большее число роликов находится в напорной ветви и больше нагрузка. Это приводит к тому, что ролики в обратной ветви, подходящие к звездочке, могут запаздывать, между роликом в звездочке и подходящим к ней образуется зазор на величину сжатия напорной ветви, т.е. расстояние между роликами в этом месте больше шага звездочки и геометрия зацепления нарушается. Этот недостаток особенно проявляется в длинноходовых подъемниках, где число роликов может превышать 100 штук и «мягкость» амортизации всего ряда элементов оказывается чрезмерной. Величина зазора бывает такова, что, при нештатном повышении нагрузки, наблюдаются щелчки и даже заклинивание механизма при попадании зуба звездочки непосредственно на тело ролика. Это приводит к быстрому износу роликов.
Помимо этого, большое число роликов усложняет технологию изготовления и удорожает стоимость изделия.
Сущность заявленного изобретения заключается в упрощении конструкции, повышении технологичности и надежности работы устройства.
Указанный технический результат, который может быть получен при осуществлении заявленного изобретения, достигается тем, что устройство для преобразования вращательного движения в поступательное перемещение, содержащее корпус с пазами, орган перемещения, состоящий из ряда рабочих элементов, содержащих, хотя бы частично, тела вращения и ползуна для связи с перемещаемым объектом, размещенные в этих пазах, и приводной орган вращательного движения в виде звездочки роликовой цепи с шагом «t», находящейся в зацеплении с телами вращения, отличается тем, что:
1 вариант - тело вращения элемента имеет два торца, на одном из которых имеется соосный этому телу вращения первый выступ, также представляющий собой тело вращения, на другом торце имеется второй выступ, удлиненный в одну сторону на 0,5t и в противоположную сторону на 1,5t от оси тела вращения, причем этот, более длинный конец второго выступа, имеет отверстие, размерами и формой отвечающее размерам и форме первого выступа и отстоящее от оси тела вращения на расстояние 1,0t, при этом элементы установлены так, что первый выступ одного элемента расположен в отверстии второго выступа соседнего элемента и элементы могут быть соединены как попарно, так и последовательно, при этом ползун расположен у одного из концов ряда элементов и может быть соединен с рядом элементов непосредственно в этом месте, а также может быть соединен с противоположным концом ряда при помощи гибкой связи.
2 вариант - тело вращения имеет два торца, на одном из которых имеется выступ, удлиненный в одну сторону на 0,5t и в противоположную сторону на 1,5t от оси тела вращения, причем этот, более длинный конец выступа, имеет второй выступ также в виде тела вращения, направленный в ту же сторону, что и первичное тело вращения, и отстоящий от его оси на расстоянии 1,0t, а первичное тело вращения имеет соосное ему отверстие, размерами и формой отвечающее размерам и форме второго выступа, при этом элементы установлены так, что второй выступ одного элемента располагается в отверстии тела вращения соседнего элемента и элементы могут быть соединены как попарно, так и последовательно, при этом ползун расположен у одного из концов ряда элементов и может быть соединен с рядом элементов непосредственно в этом месте, а также может быть соединен с противоположным концом ряда при помощи гибкой связи.
Форма первого выступа в первом варианте и второго выступа во втором варианте может быть выполнена цилиндрической, но, чтобы элементы не распадались при сборке, может быть конической или сфероидальной для соединения «в замок».
Изобретение иллюстрируется одним из возможных вариантов конструкции.
На фиг.1 показано устройство прототипа.
На фиг.2. показан один из вариантов устройства по заявленному изобретению (верхний ряд элементов 4 условно снят).
На фиг.3 показан единичный рабочий элемент органа поступательного перемещения по первому варианту.
На фиг.4 показан единичный рабочий элемент органа поступательного перемещения по второму варианту.
На фиг.5 показано попарное соединение элементов.
На фиг.6 показано последовательное соединение элементов.
Устройство (фиг.2) состоит из корпуса 1 с двумя пазами 2 и 3. Ближайшие концы пазов закруглены и соединены между собой, образуя фигуру в форме двух лучей. В пазы свободно установлены в ряд элементы 4 рабочего органа поступательного перемещения, а в непосредственной близости от паза, в данном случае в закруглении, установлена звездочка 5 для роликовой цепи с шагом «t». Элемент 4 (фиг.3) состоит из тела вращения 6, в одном из торцов которого имеется выступ 7, соосный телу вращения 6. В противоположном торце тела вращения 6 имеется второй выступ 8, имеющий удлинение в одну сторону на 0,5t, а в противоположную на 1,5t от оси тела вращения 6. В этом, более длинном конце второго выступа, имеется отверстие, своими размерами и формой отвечающее выступу 7 и отстоящее от оси тела вращения 6 на расстояние 1,0t. Элементы 4 установлены в пазах 2 и 3 так, что выступ 7 одного элемента находится в отверстии выступа 8 соседнего элемента, причем элементы могут быть соединены как попарно, так и последовательно, образуя цепочку. Звездочка 5 установлена так, что тела вращения 6 в зоне зацепления находятся во впадинах звездочки, а зубья - между телами вращения 6 соседних элементов. Звездочка установлена так, а форма и размеры сопрягаемых деталей подобраны так, чтобы траектории движения осей тел вращения совпадали с осевой линией пазов. В зависимости от конкретных условий применения устройства звездочка может быть установлена и в закруглении пазов, и на прямых участках пазов. Как один из возможных вариантов, пазы могут быть параллельны друг другу и звездочка может быть установлена как в закруглении пазов, так и в любом месте на прямых участках между пазами, и в этом случае звездочка может контактировать с обеими ветвями рабочих элементов. Для возможности огибания элементами 6 звездочки 5 и прохождения закругления пазов края выступов 8 имеют соответствующие закругления. Возможен вариант, когда пазы являются прямым продолжением друг друга, то есть, фактически, с одним пазом, без закруглений.
Для соединения с приводимым механизмом в одном из пазов имеется ползун 9, при этом ползун, при неопасных нагрузках и последовательном соединении элементов, может быть связан с набором элементов непосредственно. В принципе, в качестве ползуна может быть использован один из элементов. При попарном соединении элементов или при последовательном, но при расчетных нагрузках, превышающих допустимый предел на разрыв материала элементов, ползун может быть связан с контрползуном 10 (или одним из элементов), установленным на противоположном конце ряда элементов, посредством гибкой связи - тросиком 11. При этом тросик прокладывается между выступами 8 с внешней стороны набора элементов так, что весь ряд элементов оказывается установленным между ползуном и контрползуном с некоторым натягом. В конце каждого паза имеется упор 12.
Устройство работает следующим образом.
При вращении приводной звездочки 5 ее зубья взаимодействуют с телами вращения 6 и, через выступы 8, толкают вдоль пазов всю систему элементов 4, сообщая ползуну 9 поступательное перемещение. При вращении звездочки по часовой стрелке (по чертежу) ползун 9 в пазу 2 поднимается вверх, посредством гибкой связи 11 через контрползун 10 подталкивая элементы 4 в пазу 3 к звездочке 5 (при последовательном соединении и отсутствии гибкой связи элементы сами тянут друг друга). При вращении звездочки против часовой стрелки элементы в пазу 3 поднимаются вверх и тянут ползун 9 посредством гибкой связи вниз, а ползун подталкивает элементы в пазу 2 к звездочке. При последовательном соединении элементов и отсутствии гибкой связи ползун соединен с крайним элементом и его тянут вниз элементы в пазу 2.
Связь между существенными отличиями предлагаемой конструкции и желаемым техническим результатом усматривается в следующем.
В предлагаемом устройстве все элементы рабочего органа поступательного перемещения абсолютно одинаковы и не содержится никаких дополнительных деталей для их соединения, тем не менее они могут соединяться, по необходимости, и отдельными парами, и в непрерывную цепочку. Это упрощает технологию сборки.
Элементы, по технологическим соображениям, так же, как и элементы у прототипа, изготавливаются из пластмассы и, в силу характера контактирования между собой, суммарная собственная упругость рабочего набора элементов остается вполне достаточной для исключения необходимости применения специальных демпферов в конце хода, хотя самих элементов вдвое меньше. Более того, в зависимости от длины рабочего хода, соединяя элементы попарно или последовательно, необходимую степень упругости можно регулировать. Это также упрощает и удешевляет конструкцию.
При перемещении стекла вверх на элементы действуют силы сжатия, при перемещении стекла вниз элементы работают также только на сжатие, а на растяжение работает гибкая связь, например, в виде тросика. Это позволяет не предъявлять к материалу элементов высокие требования по прочности на разрыв и также удешевляет конструкцию. При последовательном соединении элементов и их работе на растяжение расстояние между двумя соседними телами вращения изменяется лишь на величину растяжения между одной парой тел вращения элементов, остается в допустимых пределах для используемого вида зацепления и геометрия зацепления не нарушается.
При параллельном соединении элементов их общая жесткость увеличивается. Поскольку в этом устройстве длина ряда вдвое короче, то возможная величина укорочения всего ряда при работе на сжатие, по сравнению с прототипом, уменьшается в несколько раз, а наличие гибкой связи также не позволяет элементам «запаздывать» к зацеплению со звездочкой. Тем не менее, в любом из крайних положений (до упора 12) между ползуном 9 или контрползуном 10 и звездочкой 5 находится достаточно большое число упругих элементов, контактирующих между собой, в результате чего специальных амортизаторов в устройстве не требуется.
Все это обеспечивает повышение надежности работы механизма.
Устройство имеет более простую конструкцию с небольшим перечнем простых и технологичных деталей, принцип действия надежно использует как конструктивные особенности, так и свойства материала деталей. Форма элементов более технологична, более технологична сборка и самих деталей требуется меньше.
Таким образом, искомый технический результат - упрощение конструкции, повышение ее технологичности и надежности - вполне достигнут.
Приведенный анализ существующего уровня техники показал, что аналогов, характеризующихся совокупностью признаков, тождественных всем перечисленным признакам, не обнаружено.
Следовательно, изобретение отвечает критерию «новизна».
Влияние совокупности существенных признаков на достижение искомого технического результата неизвестно и неявно следует из существующего уровня техники.
Следовательно, заявленное изобретение отвечает критерию «изобретательский уровень».
Устройство предназначено для использования в различных областях техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2003 |
|
RU2327915C2 |
| Устройство для передвижения по вертикальным опорам Л.Н.Бульмана | 1991 |
|
SU1796217A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| СТУПЕНЧАТЫЙ ПЕРЕКЛЮЧАТЕЛЬ ПЕРЕДАЧ ЧУРИКОВА ДЛЯ ТРАНСМИССИИ С БЕСКОНЕЧНОЙ ЦЕПЬЮ | 1992 |
|
RU2038253C1 |
| КОДОВЫЙ ПРОГРАММИРУЕМЫЙ ЗАМОК | 1995 |
|
RU2093655C1 |
| Устройство для нанесения защитного покрытия на тире спиралей электрических источников света | 1984 |
|
SU1432634A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2423615C2 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
| Автоматическая транспортная установка для передачи изделий с одного конвейера на другой | 1974 |
|
SU557014A1 |
| Копатель-валкоукладчик корнеклубнеплодов | 1989 |
|
SU1716999A2 |
Изобретение относится к машиностроению, а именно к устройствам для преобразования вращательного движения в поступательное перемещение. Устройство содержит корпус с пазами, рабочий орган поступательного перемещения в виде тел вращения и приводной орган вращательного движения в виде приводной звездочки с шагом «t». В пазах свободно установлены в ряд тела вращения, соответствующие впадинам приводной звездочки и входящие с ней в зацепление. Торцы тел вращения имеют разновеликие выступы с размерами, кратными 0,5t. Элементы рабочего органа могут соединяться между собой параллельно или последовательно. Для соединения с приводным механизмом в одном из пазов имеется ползун. При этом ползун установлен у одного из концов ряда и может быть соединен с рядом в этом месте непосредственно и/или с противоположным концом ряда посредством гибкой связи. Решение позволяет упростить конструкцию, повысить ее надежность и технологичность. 2 н.п. ф-лы, 6 ил.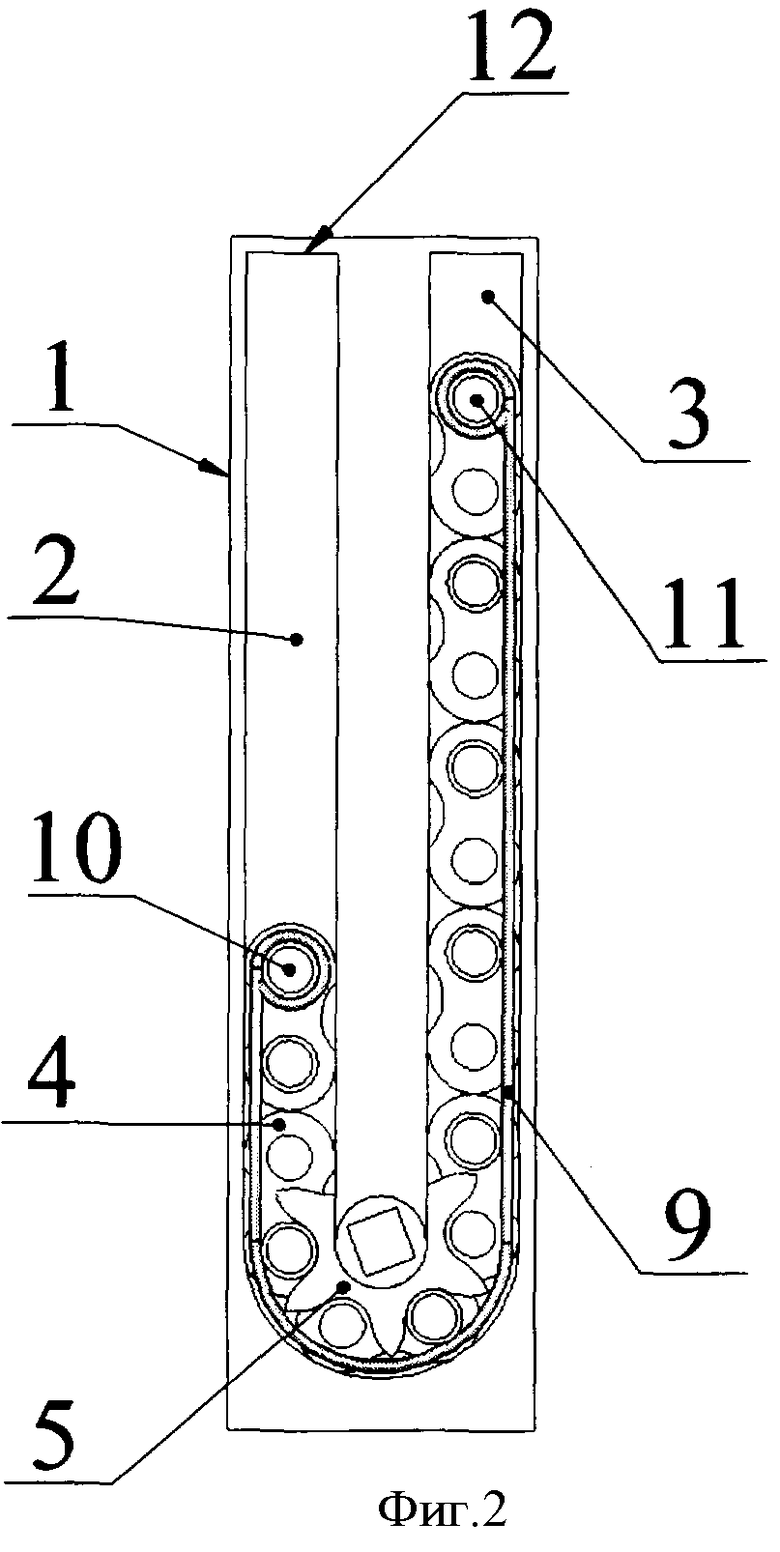
1. Устройство для преобразования вращательного движения в поступательное перемещение, содержащее корпус с пазами, рабочий орган поступательного движения, размещенный в этих пазах и состоящий из элемента для соединения с перемещаемым объектом (ползуна) и ряда рабочих элементов, имеющих тела вращения, а также приводной орган вращательного движения в виде звездочки с шагом «t», находящийся в зацеплении с телами вращения элементов рабочего органа поступательного движения, отличающееся тем, что тело вращения рабочего элемента имеет два торца, на одном из которых имеется соосный этому телу вращения первый выступ, также представляющий собой тело вращения, а на другом торце тела вращения имеется второй выступ, удлиненный в одну сторону от оси тела вращения на половину шага «t», а в противоположную - на полтора шага «t», причем более длинный конец второго выступа имеет отверстие, размерами и формой отвечающее размерам и форме первого выступа и отстоящее от оси тела вращения на шаг «t», при этом рабочие элементы установлены в пазах корпуса в ряд и могут быть соединены как попарно, так и последовательно таким образом, что первый выступ одного элемента располагается в отверстии второго выступа соседнего элемента, причем первый выступ может иметь цилиндрическую, коническую или сфероидальную форму, и ползун расположен с одной стороны ряда рабочих элементов и может быть соединен с рядом рабочих элементов в этом месте непосредственно, а также и/или с противоположным концом ряда элементов посредством гибкой связи, причем в качестве ползуна может быть использован рабочий элемент, а в зоне зацепления элементов со звездочкой зубья звездочки находятся между телами вращения соседних элементов.
2. Устройство для преобразования вращательного движения в поступательное перемещение, содержащее корпус с пазами, рабочий орган поступательного движения, размещенный в этих пазах и состоящий из элемента для соединения с перемещаемым объектом (ползуна) и ряда рабочих элементов, имеющих тела вращения, а также приводной орган вращательного движения в виде звездочки с шагом «t», находящейся в зацеплении с телами вращения элементов рабочего органа поступательного движения, отличающееся тем, что тело вращения рабочего элемента имеет два торца, на одном из которых имеется выступ, удлиненный в одну сторону на половину шага «t» от оси тела вращения, а в противоположную сторону - на полтора шага «t», но в этом более длинном конце выступа имеется второй выступ в виде тела вращения, направленный в ту же сторону, что и первичное тело вращения, и отстоящий от оси этого первичного тела вращения на расстоянии шага «t», а само первичное тело вращения имеет соосное себе отверстие, размерами и формой отвечающее размерам и форме второго выступа, и элементы установлены в пазах корпуса в ряд и могут быть соединены как попарно, так и последовательно таким образом, что второй выступ одного элемента располагается в отверстии первичного тела вращения соседнего элемента, причем второй выступ может иметь цилиндрическую, коническую или сфероидальную форму, и ползун расположен с одной стороны ряда рабочих элементов и может быть соединен с рядом рабочих элементов в этом месте непосредственно, а также и/или с противоположным концом ряда элементов посредством гибкой связи, причем в качестве ползуна может быть использован рабочий элемент, а в зоне зацепления элементов со звездочкой зубья звездочки находятся между первичными телами вращения соседних элементов.
| RU 2003118059 А, 20.12.2007 | |||
| ЖЕШЖЫПШЕСНДЯБИБЛИОТЕКА | 0 |
|
SU325239A1 |
| Устройство для автоматического учета количества продукции | 1939 |
|
SU64143A1 |
| Процессор управляющей вычислительной машины | 1975 |
|
SU579621A1 |

