Изобретение относится к конвейерному оборудованию, а именно к устройствам шагового перемещения для межоперационного транспортирования изделий
Цель изобретения - снижение металлоемкости и энергоемкости устройства при большой величине подъема груза.
На фиг.1 изображено устройство для шаговых перемещений груза, общий вид; на фиг.2 - узел I на фиг.1, в исходном положении; на фиг.З - то же. в момент начала горизонтального перемещения; на фиг 4 - узел П на фиг.З
Устройство для шаговых перемещений груза содержит раму 1 с направляющими 2, по которым установлены с возможностью возвратно-поступательного перемещения на рамках 3 жестко связанные между собой посредством стяжек 4 одна приводная каретка 5 и несколько (например, две) неприводных кареток 6
В каретках 5 и 6 имеются вертикальные пазы, в которых на роликах 7 установлены с возможностью возвратно-поступательного перемещения ползуны 8.
Приводной цепной тяговый орган, например цепь 9, приводится в движение посредством электромеханического привода 10, огибает закрепленные на раме 1 натяжную звездочку 11, поддерживающие звездочки 12 и приводную звездочку 13. На участке между звездочками 11 и 13 цепь 9 снабжена шарнирами 14, расстояние между которыми равно шагу между каретками 5 и 6. Приводной цепной тяговый орган - цепь 9 - соединен с ползунами 8 посредством гибких тяг 15, одни концы которых соединены с верхней частью ползунов 8, а другие концы соединены с шарнирами 14. На тягах 4 у каждой каретки установлены две поддерживающие звездочки 16 и 17 для удержания цепи 9 от провисания, связанные с кареткой и размещенные по обе стороны от каретки вдоль направления ее перемещения. На каретке расположен приводной фиксатор ползуна, выполненный в виде подпружиненного в сторону ползуна 8 язычка 18, который установлен с возможностью возвратно-поступательного перемещения посредством закрепленного на корпусе каретки электромагнита 19 и.взаимодействия с выступом 20 фиксирующего приспособления, расположенного на ползуне 8. Для сокращения продольного габарита кареток 5 и 6 в верхней части вертикальных пазов этих кареток установлены с возможностью взаимодействия с тягами 15, но без возможности взаимодействия с тяговой цепью 9, отклоняющие элементы в виде звездочек 21. С ползуном 8 связано приспособление для удержания груза - грузозахватное устройство 22, снабженное фиксирующим приспособлением, расположенным на ползуне 8 с возможностью взаимодействия с приводным фиксатором. Фиксирующее приспособление выполнено в виде расположенной на ползуне и соединенной с приспособлением для удержания груза штанги 23 с рядом размещенных на ней выступов 20 с гнездами для фиксаторов- язычков 18, при этом выступы 20 установлены на штанге 23 с заданным шагом Н с возможностью перемещения и фиксации один относительно другого. Форма гнезда на выступах 20 соответствует форме язычка 18, выполненного, например, со скосом в сторону опускания груза.
Грузозахватные устройства 22 крепятся к ползунам 8 с помощью штанг23. Для предотвращения самопроизвольного горизонтального перемещения кареток 5 и 6 на
раме 1 установлены с возможностью переустановки два механизма фиксации кареток 5 и 6 в крайних положениях. Каждый из этих механизмов содержит силовой цилиндр 24,
на штоке которого закреплена с возможностью фиксации каретки 6 тормозная колодка 25. В крайних положениях конструкция снабжена конечными выключателями (не показаны), которые контролируют срабаты0 вание всех механизмов.
Устройство для шаговых перемещений груза работает следующим образом.
В исходном положении каретки 5 и 6 находятся в крайнем левом положении, ко5 лодка 25 прижата к ответной колодке, расположенной на каретке 6. ползуны 8 находятся в крайнем нижнем положении, при этом тяги 15 расположены вертикально, По команде с пульта управления (не по0 казан) грузозахватные устройства 22 зажимают изделия (не показаны), электромагнит 19 выводит язычок 18 из зацепления, включается привод 10 и начинает перемещать тяговую цепь 9 против часовой стрелки. При
5 этом шарниры 14 перемещаются вправо, увлекая за собой тяги 15, что приводит к подъему ползунов 8. При подъеме ползунов 8 (а значит, и грузозахватных устройств 22 с грузами) на необходимую величину срабатыва0 ют конечные выключатели и происходит кратковременная остановка привода 10, во время которой подпружиненный язычок 18 входит в зацепление с упором 20, стопоря ползун 8, а колодка 25 посредством силово5 го цилиндра 24 отходит от каретки 6. После этого вновь включается привод 10 и продолжает перемещать тяговую цепь 9 в прежнем направлении.
При достижении каретками крайнего
0 правого положения срабатывает конечный выключатель и вновь происходит кратковременная остановка привода 10, во время которой колодка 25 прижимается к ответной колодке каретки 5, вновь включается привод
5 10 и начинает перемещать тяговую цепь по часовой стрелке, при этом шарнир 14 перемещается влево, электромагнит 19 освобождает язычок 18 из зацепления с выступом 20, что дает возможность ползунам 8 с грузозахватными устройствами 22 под собст0 венным весом перемещаться вниз. При достижении ползунами 8 крайнего нижнего положения привод 10 останавливается, Грузозахватные устройства 22 освобождают изделия. После этого опять включается при5 вод 10 и перемещает тяговую цепь 9 по часовой стрелке, перемещая шарниры 14 влево. При подъеме ползунов 8 на необходимую величину опять происходит кратковременная остановка привода 10. во время
которой подпружиненный язычок 18 входит в зацепление с выступом 20, стопоря ползун 8, включается привод 10. перемещая тяговую цепь 9 по часовой стрелке, и тележки 5 и б перемещаются в крайнее левое положение. Вновь происходит кратковременная остановка привода 10, во время которой колодка 25 прижимается к ответной колодке каретки 6. Вновь электромагнит 19 выводит язычок 18 из зацепления, включается привод 10 и начинает перемещать тяговую цепь 9 против часовой стрелки, при этом ползун 8 с грузозахватными устройствами 22 возвращается в исходное положение, которое определяется срабатыванием конечных выключателей. Далее цикл повторяется.
Переналадка устройства на другой шаг осуществляется переустановкой конечных выключателей, которые определяют крайние положения кареток 5 и 6. Кроме того, конечные выключатели могут быть установлены таким образом, что цикл работы устройства будет содержать ряд чередующихся по заданной программе перемещений на разные дискретные расстояния от одной исходной точки.
Для опускания грузозахватных устройств 22 с грузами в местах между технологически заданными положениями кареток (например, при сбоях в работе линии или в каких-либо аварийных ситуациях) достаточно остановить привод 10 и электромагнитом 19 вывести язычок 18 из зацепления с упором 20. При этом под действием момента сил, возникающего от веса ползунов 8 и грузозахватных устройств 22, относительно осей звездочек 21 тележки 5 и 6 перемещаются, а ползуны 8 опускаются. Если же величина упомянутого момента сил будет недостаточна для перемещения тележек 5 и 6, то опускание грузозахватных устройств 22 осуществляется описанным ранее способом (за счет реверсивного включения привода 10). При использовании устройства для штабелирования и разборки штабелей грузов осуществляется переналадка шага Н выступов 20, закрепленных на штанге 23 ползуна 8 с возможностью перемещения, например, по направляющим и фиксации
этих выступов ня направляющих, напри мер, винтами.
Устройство для шаговых перемещений позволяет поднимать и опускать гру на
различную высоту, что дает возможность использовать устройство в качестве транспор- тно-штабелирующего устройства, при этом устройство имеет низкие металлоемкость и энергоемкость при большой величине подъема груза за счет возможности выполнения кареток с малыми габаритами.
Формула изобретения
1.Устройство для шаговых перемеще- ний груза, содержащее раму с направляющими, установленную с возможностью возвратно-поступательного перемещения по направляющим каретку с вертикальным пазом, установленный с возможностью возратно-поступательного перемещения в вертикальном пазу каретки ползун с приспособлениями для удержания груза, приводной цепной тяговый орган, соединенный с ползуном гибкой тягой, расположенной между закрепленными на каретке двумя отклоняющими элементами, связанные с кареткой две поддерживающие звездочки для цепного тягового органа и расположенный на каретке приводной фиксатор, от л и ч а ю ще е с я тем, что, с целью снижения металлоемкости и энергоемкости устройства при большой величине подъема груза, оно снабжено фиксирующим приспособлением, расположенным на ползуне с
возможностью взаимодействия с приводным фиксатором, а поддерживающие звездочки размещены по обеим сторонам от каретки вдоль направления ее перемещения.
2.Устройство поп.1,отличающее- с я тем, что, с целью расширения технологических возможностей устройства путем обеспечения переналадки на различную высоту подъема груза, фиксирующее приспособление выполнено в виде расположенной
на ползуне и соединенной с приспособлением для удержания груза штанги с рядом размещенных на ней выступов с гнездами для фиксаторов, при этом выступы установлены на штанге с возможностью перемещения и фиксации относительно друг друга.
in
ID
r-
cc
cr,
CD
//
Я 51
I
22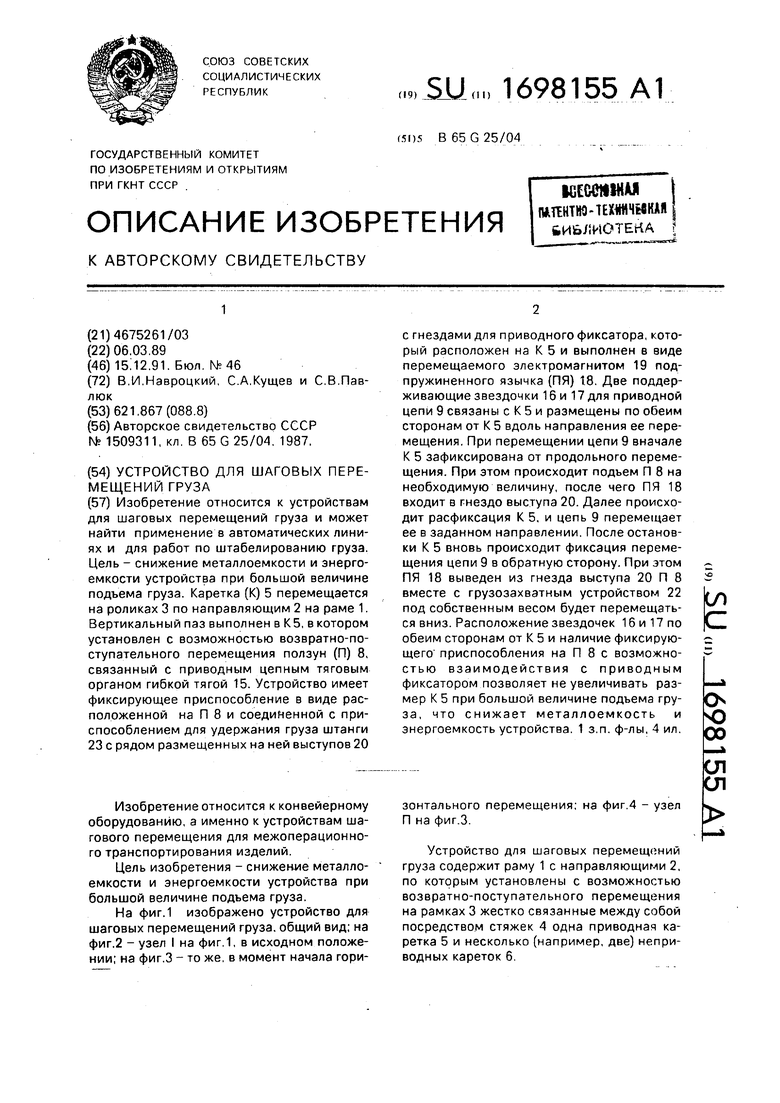
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговых перемещений груза | 1987 |
|
SU1509311A1 |
| Устройство для шаговых перемещений груза | 1988 |
|
SU1583332A1 |
| Подвесное устройство для перемещения груза | 1989 |
|
SU1691233A1 |
| Устройство для управления приводом вертикального перемещения кареток грузоподъемной машины | 1981 |
|
SU1009927A1 |
| Шаговый механизм для перемещения груза | 1990 |
|
SU1742200A1 |
| Строительный подъемник | 1971 |
|
SU450763A1 |
| Устройство для шагового перемещения | 1991 |
|
SU1791365A1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2005 |
|
RU2297383C2 |
| Устройство для шагового перемещения груза | 1988 |
|
SU1548124A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
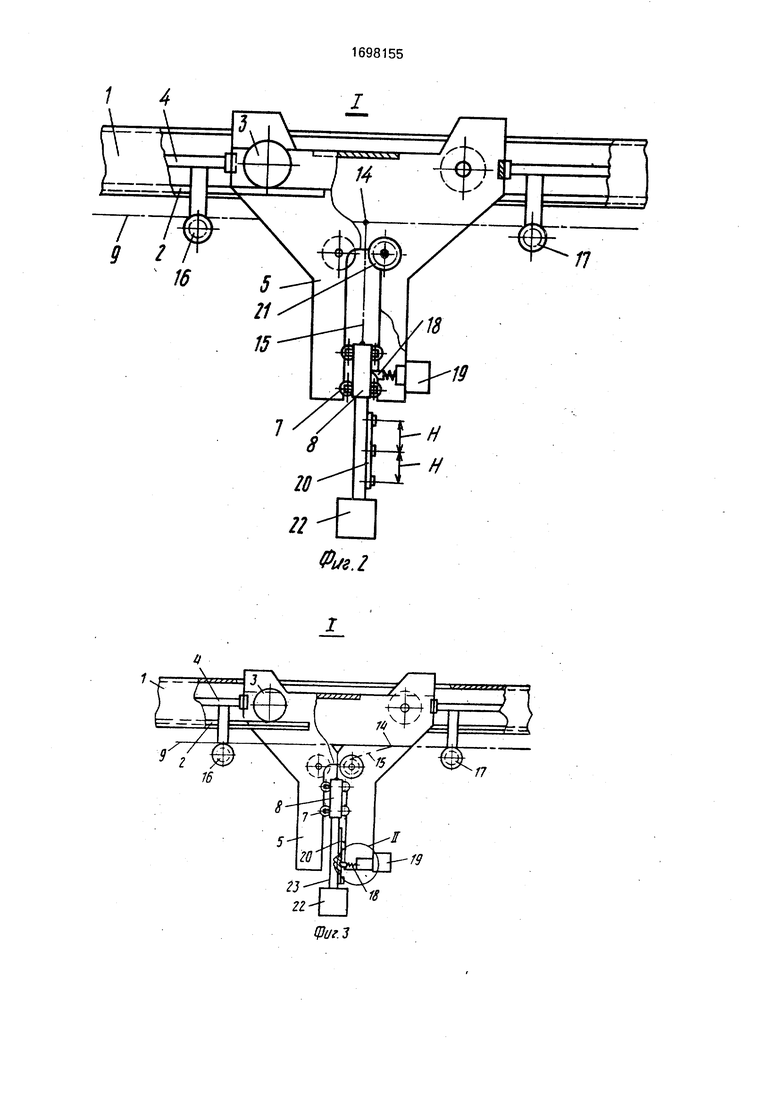
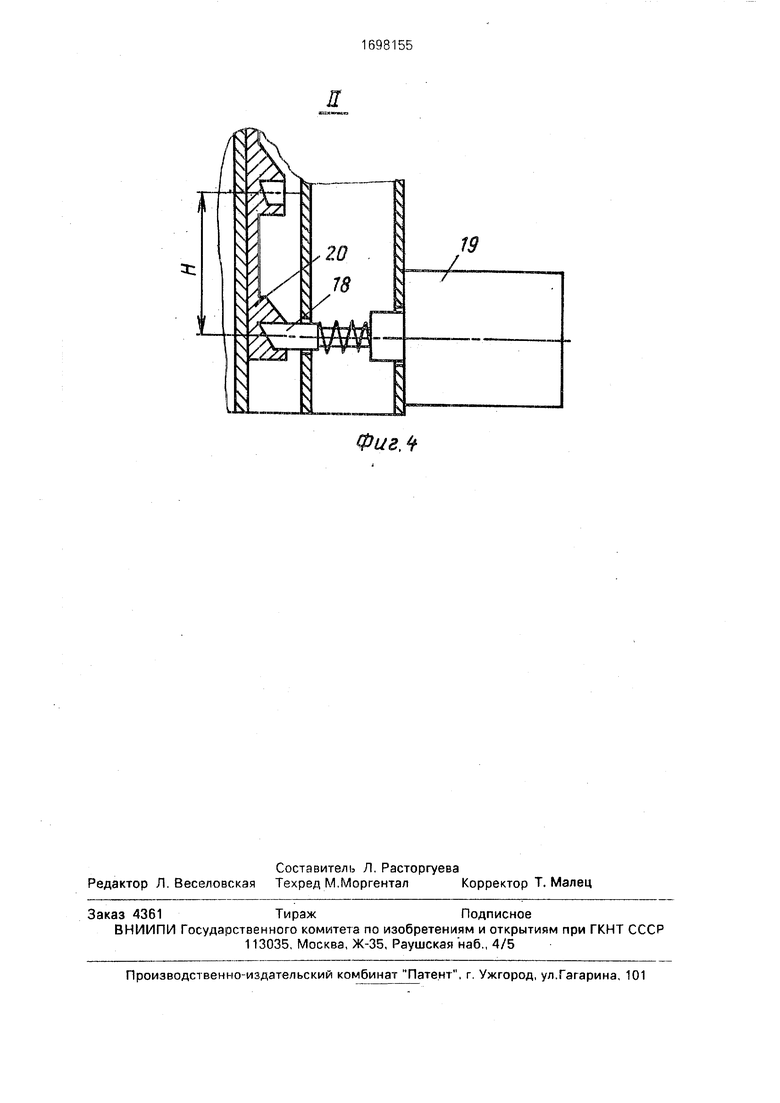
Изобретение относится к устройствам для шаговых перемещений груза и может найти применение в автоматических линиях и для работ по штабелированию груза. Цель - снижение металлоемкости и энергоемкости устройства при большой величине подъема груза. Каретка (К) 5 перемещается на роликах 3 по направляющим 2 на раме 1. Вертикальный паз выполнен в К 5, в котором установлен с возможностью возвратно-поступательного перемещения ползун (П) 8, связанный с приводным цепным тяговым органом гибкой тягой 15. Устройство имеет фиксирующее приспособление в виде расположенной на П 8 и соединенной с приспособлением для удержания груза штанги 23 с рядом размещенных на ней выступов 20 с гнездами для приводного фиксатора, который расположен на К 5 и выполнен в виде перемещаемого электромагнитом 19 подпружиненного язычка (ПЯ) 18. Две поддерживающие звездочки 16 и 17 для приводной цепи 9 связаны с К 5 и размещены по обеим сторонам от К 5 вдоль направления ее перемещения. При перемещении цепи 9 вначале К 5 зафиксирована от продольного перемещения. При этом происходит подъем П 8 на необходимую величину, после чего ПЯ 18 входит в гнездо выступа 20. Далее происходит расфиксация К 5, и цепь 9 перемещает ее в заданном направлении. После остановки К 5 вновь происходит фиксация перемещения цепи 9 в обратную сторону. При этом ПЯ 18 выведен из гнезда выступа 20 П 8 вместе с грузозахватным устройством 22 под собственным весом будет перемещаться вниз. Расположение звездочек 16 и 17 по обеим сторонам от К 5 и наличие фиксирующего приспособления на П 8 с возможностью взаимодействия с приводным фиксатором позволяет не увеличивать размер К 5 при большой величине подъема груза, что снижает металлоемкость и энергоемкость устройства. 1 з.п. ф-лы, 4 ил. Ј Os ю 00 сл ел
Фм.2
Фиг. 4
| Редукционный стан | 1974 |
|
SU509311A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
