Настоящее изобретение относится к способу и устройству отображения для воздушного судна, в частности для транспортного самолета, которое следует плану полета.
Известно, что в международном контексте, где объем воздушного движения постоянно увеличивается, с траекториями воздушного судна связываются все более и более узкие воздушные коридоры. Для того чтобы предоставить возможность уменьшения ширины этого воздушного коридора, в частности, должны учитываться определенные особенности характеристики упомянутого воздушного судна.
Кроме того, известно, что особенности характеристики, которые воздушное судно должно поддерживать, чтобы оставаться в таком воздушном коридоре, бывают двух типов, а именно:
- характеристика наведения: цель заключается в том, чтобы воздушное судно корректно следовало плану полета, то есть, чтобы минимизировать ошибку наведения (обозначаемую как "Техническая ошибка в полете" или FTE - Flight Technical Error); и
- характеристика навигации: цель заключается в том, чтобы иметь хорошую оценку действительного положения воздушного судна, то есть, чтобы минимизировать Ошибку Оценки Положения (PEE - Position Estimation Error).
Чтобы обеспечить наличие вышеупомянутых особенностей характеристики, следовательно, будет целесообразно минимизировать сумму этих двух ошибок FTE и PEE, то есть общую ошибку, которая обозначается как "Общая Системная Ошибка" или TSE - Total System Error.
Устойчивость этого параметра TSE является одним из условий, необходимых для предоставления возможности, в частности:
- пилотировать воздушное судно согласно новым типам захода на посадку относительно местностей, содержащих препятствия или представляющих ограничения для посадки;
- выполнять одновременные заходы на посадку на взлетно-посадочные полосы, которые расположены близко друг к другу; и
- обеспечить меньшие минимумы высоты, на которой принимается решение о выполнении посадки.
Следовательно, пилоту и системам воздушного судна необходимо выполнять мониторинг характеристики в части наведения и навигации упомянутого воздушного судна относительно требуемой характеристики. В частности, подобная информация предоставляет возможность уведомлять пилота и систему о резерве, остающемся для удержания воздушного судна в требуемом воздушном коридоре.
Настоящее изобретение относится к способу отображения для воздушного судна, которое следует плану полета, причем способ предоставляет возможность обеспечивать пилота воздушного судна информацией, позволяющей ему выполнять простой и точный мониторинг характеристики воздушного судна, относящейся к ограничению воздушного судна в коридоре полета (или воздушном коридоре).
Для этой цели согласно настоящему изобретению упомянутый способ отображения примечателен тем, что автоматически и повторяющимся образом выполняются следующие последовательные этапы, на которых:
а) вычисляют действительное положение воздушного судна;
b) определяют, по меньшей мере, одно максимально допустимое отклонение от заданного положения на траектории полета, обусловленной упомянутым планом полета, в зависимости, с одной стороны, от характеристики, относящейся к точности и целостности вычисления упомянутого действительного положения воздушного судна, и, с другой стороны, от ограничения, относящегося к зоне полета, которая допустима в коридоре полета, связанном с упомянутым планом полета; и
c) на, по меньшей мере, одном просмотровом экране представляют, по меньшей мере, одну шкалу дальности, и на этой шкале дальности представляют, по меньшей мере:
- первый символ, который неподвижен и который указывает упомянутое действительное положение, который принимается как исходное положение; и
- два индикатора, которые указывают границы упомянутого максимально допустимого отклонения, как правило, на обеих сторонах траектории полета, причем упомянутые индикаторы являются подвижными, и относительно упомянутого первого символа они каждый раз располагаются в соответствии с результатами обработок, выполняемых на упомянутых этапах а) и b).
Таким образом, посредством этих элементов (первого символа и индикаторов), отображенных на просмотровом экране, пилоту предоставляется возможность точным образом оценивать положение воздушного судна относительно максимально допустимого отклонения, связанного с этим планом полета.
Кроме того, посредством упомянутой шкалы дальности эти элементы предоставляют ему индикацию о действительном расстоянии. Предпочтительно эта шкала дальности является неизменяемой, то есть она всегда представляет одинаковое отношение между изображенным представлением длины и соответствующей действительной длиной, так что эта информация всегда представляется унифицированным образом.
Преимущественно, если упомянутые индикаторы передвигаются относительно упомянутого первого символа так, что упомянутый первый символ больше не располагается между этими индикаторами, то издается первый тревожный сигнал.
В предпочтительном варианте осуществления:
- на этапе b), кроме того, определяют заданное положение воздушного судна, соответствующее положению, требуемому планом полета; и
- на этапе с), кроме того, на упомянутом просмотровом экране представляют второй символ, который указывает упомянутое заданное положение на шкале дальности, причем упомянутый второй символ является подвижным и относительно упомянутого первого символа он каждый раз располагается в соответствии с результатами обработок, выполняемых на упомянутых этапах а) и b).
Таким образом, посредством этих элементов (первого и второго символов), отображенных на просмотровом экране, пилоту предоставляется возможность точно оценивать положение воздушного судна относительно положения, требуемого планом полета.
Сверх того, преимущественно:
- на этапе с), кроме того, определяют вспомогательное отклонение, которое иллюстрирует характеристику наведения воздушного судна, в зависимости от режима пилотирования, активированного, чтобы пилотировать воздушное судно; и
- на этапе d), кроме того, на упомянутом просмотровом экране представляют два маркера, которые указывают на шкале дальности границы упомянутого вспомогательного отклонения, как правило, на обеих сторонах траектории полета, причем упомянутые маркеры являются подвижными и относительно упомянутого первого символа они каждый раз располагаются в соответствии с результатами предыдущей обработки.
Дополнительно, эффективным образом:
- упомянутое максимально допустимое отклонение сравнивают с упомянутым вспомогательным отклонением; и
- если упомянутое максимально допустимое отклонение становится меньше, чем упомянутое вспомогательное отклонение, то издается второй тревожный сигнал.
В первом варианте упомянутое максимально допустимое отклонение является максимально допустимым боковым отклонением, и упомянутая траектория полета является боковой траекторией полета.
В особом варианте осуществления на этапе b) как максимально допустимое боковое отклонение определяется наименьшая из следующих трех разностей:
- разность между ограничением коридора, относящимся к коридору полета, и неопределенностью в вычисленном действительном положении;
- разность между удвоенным упомянутым ограничением коридора и пределом горизонтальной целостности; и
- разность между удвоенным упомянутым ограничением коридора и вероятностью, относящейся к ошибке поперечной навигации.
Во втором варианте или как дополнение к вышеупомянутому первому варианту упомянутое максимально допустимое отклонение является максимально допустимым вертикальным отклонением, и упомянутая траектория полета является вертикальной траекторией полета.
В третьем варианте или как дополнение к одному или обоим из вышеупомянутых вариантов упомянутое максимально допустимое отклонение является продольным отклонением согласно траектории полета.
Дополнительно, в особом варианте осуществления на этапе с) представляют одну или более из следующих шкал дальности:
- боковую шкалу;
- продольную шкалу; и
- вертикальную шкалу.
Сверх того, преимущественно на этапе с) на одной и той же шкале дальности, соответствующей горизонтальному отклонению, выполняют комбинированное отображение бокового и продольного отклонений.
Настоящее изобретение также относится к устройству отображения для воздушного судна, которое следует плану полета.
Согласно настоящему изобретению упомянутое устройство примечательно тем, что оно содержит:
- первое средство для вычисления действительного положения воздушного судна;
- возможно второе средство для определения заданного положения воздушного судна, соответствующего положению, требуемому планом полета;
- третье средство для определения, по меньшей мере, одного максимально допустимого отклонения (бокового, вертикального или продольного) от заданного положения на траектории (боковой или вертикальной, или согласно последней) полета, обусловленной упомянутым планом полета, в зависимости, с одной стороны, от характеристики, относящейся к точности и целостности вычисления упомянутого действительного положения воздушного судна, и, с другой стороны, от ограничения, относящегося зоны полета, которая допустима в коридоре полета, связанном с упомянутым планом полета; и
- систему отображения для представления на, по меньшей мере, одном просмотровом экране, по меньшей мере, одной шкалы дальности (предпочтительно неизменяемой), а также для представления на этой шкале дальности:
* первого символа, который является неподвижным и который указывает упомянутое действительное положение, которое принимается как исходное положение;
* возможно второго символа, который указывает упомянутое заданное положение; и
* двух индикаторов, которые указывают границы (на обеих сторонах траектории полета в случае бокового или вертикального отклонения) упомянутого максимально допустимого отклонения,
причем упомянутая система отображения сформирована, чтобы перемещать упомянутый второй символ и упомянутые индикаторы, которые являются подвижными, так чтобы относительно упомянутого первого символа они каждый раз располагались в соответствии с результатами обработок, выполняемых посредством упомянутого первого, второго и третьего средств.
Предпочтительно упомянутое устройство согласно настоящему изобретению, сверх того, содержит четвертое средство для определения вспомогательного отклонения, которое иллюстрирует характеристику наведения воздушного судна, в зависимости от активированного режима пилотирования, и упомянутая система отображения, сверх того, представляет на упомянутом просмотровом экране два маркера, которые указывают на шкале дальности границы (на обеих сторонах траектории полета в случае бокового или вертикального отклонения) упомянутого вспомогательного отклонения, причем упомянутая система отображения сформирована, чтобы передвигать упомянутые маркеры, которые являются подвижными, так чтобы относительно упомянутого первого символа они каждый раз располагались в соответствии с результатами обработок, выполняемых упомянутым четвертым средством.
Сверх того, в особом варианте осуществления упомянутое устройство, кроме того, содержит:
- средство, способное издавать, по меньшей мере, один тревожный сигнал; и/или
- базу данных, содержащую величины ограничений, в частности величины ограничений коридора, относящиеся к коридору полета, связанному с планом полета.
Дополнительно, преимущественно:
- по меньшей мере, упомянутое третье средство образует часть системы управления полетом воздушного судна; и/или
- упомянутый просмотровый экран является основным пилотажным экраном.
Прилагаемые чертежи четко разъясняют способ, по которому может быть реализовано настоящее изобретение, где идентичные ссылки обозначают схожие элементы.
Фиг.1 - структурная схема устройства отображения согласно настоящему изобретению;
Фиг.2-5 - схематические иллюстрации отображения, выводимого согласно настоящему изобретению, например, на основном пилотажном экране в различных ситуациях полета соответственно;
Фиг.6-8 - схематические иллюстрации вариантов осуществления индикаций, представленных на просмотровом экране согласно настоящему изобретению.
Схематически показанное на Фиг.1 устройство 1 согласно настоящему изобретению предназначено для отображения описанной ниже информации о воздушном судне А, в частности транспортном самолете, который следует плану полета. Этот план полета определяется обычным образом либо до полета, либо в процессе полета, например, посредством системы управления полетом типа FMS (Flight Management System).
Согласно настоящему изобретению упомянутое устройство 1 содержит:
- набор 2 источников информации, содержащих, в частности, обычное средство, оборудованное, например, датчиком типа GPS (Global Positioning System - Система Глобального Позиционирования) для вычисления действительного положения воздушного судна А;
- средство 3 для определения заданного положения воздушного судна А, соответствующего положению, требуемому упомянутым планом полета, которому должно следовать воздушное судно А;
- средство 4 для определения в масштабе реального времени, по меньшей мере, одного максимально допустимого отклонения на какую-либо сторону траектории полета, которая обычно обусловлена упомянутым планом полета. В рамках настоящего изобретения это может вовлекать максимально допустимое боковое отклонение, относящееся к боковой траектории полета, и/или максимально допустимое вертикальное отклонение, относящееся к вертикальной траектории полета, и/или максимально допустимое продольное отклонение согласно траектории полета. В качестве иллюстрации, которая не является исключительной, следующее описание относится к максимально допустимому боковому отклонению Е1 на какой-либо стороне боковой траектории 5 полета, которая схематически показана в верхней части Фиг.2-5. Согласно настоящему изобретению упомянутое средство 4 определяет упомянутое максимально допустимое боковое отклонение Е1 в зависимости:
* с одной стороны, от характеристики, относящейся к точности и целостности вычисления упомянутого действительного положения воздушного судна А, то есть уверенности в изменениях и вычислениях, выполненных, чтобы определить упомянутое действительное положение; и
* с другой стороны, от ограничения, относящегося к допустимой зоне полета, и, более конкретно, к ограничению CV коридора, относящегося к коридору полета, который задается границами 6А 6В, также показанными в верхней части Фиг.2-5. Упомянутый коридор полета (или воздушный коридор) связан с упомянутым планом полета и является таким, что воздушное судно А должно оставаться в пределах упомянутого коридора полета, когда оно следует упомянутому плану полета; и
- систему 7 отображения, которая содержит, по меньшей мере, один просмотровый экран 8 и которая представляет на упомянутом просмотровом экране 8, по меньшей мере, одну шкалу 9 дальности, а также на этой шкале 9 дальности, градуированной, например, в морских милях, упомянутая система 7 отображения представляет:
* символ 10, например расположенную вертикально черту, которая является неподвижной и которая указывает упомянутое действительное положение воздушного судна А, причем упомянутое действительное положение принимается как исходное положение; и
* набор индикаций 11, который является подвижным относительно упомянутого неподвижного символа 10.
Упомянутый набор индикаций 11 содержит, по меньшей мере:
- символ 12, например прямоугольник или расположенную вертикально черту, который указывает упомянутое заданное положение, то есть положение, требуемое на боковой траектории 5 полета планом полета; и
- два индикатора 13 и 14, которые указывают границы 15А и 15 В (на обеих сторонах боковой траектории 5 полета) упомянутого максимально допустимого бокового отклонения Е1, как показано на Фиг.2.
Согласно настоящему изобретению упомянутая система 7 отображения сформирована, чтобы перемещать упомянутый набор индикаций 11, который является подвижным, так чтобы относительно упомянутого символа 10 он всегда располагался в соответствии с результатами вышеупомянутых обработок (выполняемых в масштабе реального времени).
Таким образом, посредством этих элементов (символов 10 и 12, и индикаторов 13 и 14), отображаемых на просмотровом экране 8, пилоту предоставляется возможность точно оценить положение воздушного судна А, с одной стороны, относительно положения, требуемого планом полета, и, с другой стороны, относительно максимально допустимого бокового отклонения Е1, относящегося к этому плану полета.
Кроме того, посредством упомянутой шкалы 9 дальности эти элементы 10, 12, 13, 14 предоставляют ему индикацию о соответствующих действительных расстояниях. Предпочтительно, эта шкала 9 дальности является неизменяемой, то есть она всегда представляет одинаковое отношение между изображенным представлением длины и соответствующей действительной длиной, так что эта информация всегда представляется унифицированным образом относительно длины.
Что касается отображения (в частности, для продольного отклонения), то в рамках настоящего изобретения предусматриваются несколько возможностей, в частности: продольное отклонение на особой шкале дальности (в добавление к двум шкалам дальности - боковой и вертикальной, можно предусмотреть все комбинации: отображение только одной, двух или трех шкал дальности);
комбинированное отображение бокового и продольного отклонений на одной и той же шкале дальности, соответствующей горизонтальному отклонению.
В верхних частях Фиг.2-5 показана ситуация в полете, а в нижней части показано отображение, выводимое согласно настоящему изобретению для соответствующей ситуации.
Фиг.2 иллюстрирует пример, где воздушное судно А расположено на боковой траектории 5 полета. В этом случае символ 10, указывающий действительное положение воздушного судна А, и символ 12, указывающий предписанное положение или заданное положение на упомянутой боковой траектории 5 полета, накладываются друг на друга.
В примере с Фиг.3 действительное положение воздушного судна А (которое расположено на действительной боковой траектории 17) смещено вбок относительно предписанной боковой траектории 5 на расстояние D. Кроме того, символ 12 смещен относительно упомянутого неподвижного символа 10. Тем не менее, поскольку это боковое расстояние или отклонение D меньше максимально допустимого бокового отклонения E1 (не показано), упомянутый символ 10 всегда располагается между индикаторами 13 и 14, которые указывают границы упомянутого максимально допустимого бокового отклонения Е1, на обеих сторонах боковой траектории 5 полета. В этом случае полет воздушного судна А остается в соответствии с директивами, причем воздушное судно А располагается на достаточном расстоянии от границ 6А и 6В коридора полета, таким образом, предохраняя его от какого-либо риска выхода из упомянутого коридора полета.
С другой стороны, в примере с Фиг.4 боковое отклонение D больше, чем максимально допустимое боковое отклонение E1, и присутствует риск, что воздушное судно А находится вне упомянутого коридора полета. Набор индикаций 11, следовательно, смешается вбок относительно упомянутого символа 10. В этом случае воздушное судно А больше не удовлетворяет ограничению в части нахождения в коридоре полета.
Устройство 1 согласно настоящему изобретению содержит средство 18 тревоги для излучения тревожного сигнала в такой ситуации. Тревожный сигнал может соответствовать сообщению, которое отображается на экране, например на просмотровом экране 8 или любом другом экране воздушного судна А, таком как многофункциональный экран управления типа MCDU (Multipurpose Control Display Unit - Многоцелевой Блок Управления и Индикации) или навигационный экран типа ND (Navigation Display - Навигационный Дисплей), например. Тревожный сигнал может также соответствовать информации, которая передается в систему аварийного оповещения типа FWS (Flight Warning System - Система Сигнализации в Полете).
В предпочтительном варианте осуществления сигнал тревоги выделяется на просмотровом экране 8 (показанном на Фиг.2-5) путем мигания набора индикаций 11 и, возможно, символа 10.
В варианте осуществления с Фиг.2-5 упомянутый просмотровый экран 8 является основным пилотажным экраном типа PFD (Primary Flight Display - Основной Пилотажный Дисплей, который отображает обычным образом центральную зону 16, содержащую искусственный горизонт, который меняет наклон, когда воздушное судно А наклоняется). Обычно такой основной пилотажный экран 8 также содержит шкалу 19 скорости, шкалу 20 курса и шкалу 21 высоты.
Дополнительно, в особом варианте осуществления упомянутое ограничение CV коридора, которое зависит от текущего плана полета, записывается в базу 22 данных устройства 1.
Кроме того, в предпочтительном варианте осуществления упомянутое средство 4 определяет упомянутое максимальное допустимое боковое отклонение E1, как наименьшую из следующих трех разностей, которые оно вычисляет в масштабе реального времени:
- разность между упомянутым ограничением CV коридора, выводимым из упомянутой базы 22 данных, и предопределенной неопределенностью в упомянутом вычисленном действительном положении;
- разность между удвоенным упомянутым ограничением CV коридора и предопределенной границей горизонтальной целостности; и
- разность между удвоенным упомянутым ограничением CV коридора и предопределенной вероятностью, относящейся к ошибке поперечной навигации.
Дополнительно, в особом варианте осуществления упомянутое устройство 1, кроме того, содержит:
- обычное средство 23 для индикации режима пилотирования (автопилот, директор полета), используемого на текущий момент воздушным судном А, чтобы следовать упомянутому плану полета; и
- средство 24 для определения вспомогательного отклонения E2, которое иллюстрирует характеристику наведения воздушного судна А в зависимости от упомянутого режима пилотирования, активированного на текущий момент, чтобы пилотировать воздушное судно А, и информацию, которая принимается из упомянутого средства 23.
Это вспомогательное отклонение E2 может также зависеть от геометрической формы траектории полета или условий снаружи воздушного судна А, таких как прогнозируемый ветер на траектории полета.
В этом случае система 7 отображения, сверх того, представляет на упомянутом просмотровом экране 8 два маркера 25 и 26, которые указывают на шкале 9 дальности границы 39А и 39В (Фиг.5) упомянутого вспомогательного отклонения Е1 на обеих сторонах боковой траектории 5 полета. Упомянутые маркеры 25 и 26 образуют часть упомянутого набора индикаций 11 и перемещаются относительно символа 10 в соответствии с результатами предыдущей обработки. Маркеры 25 и 26, следовательно, указывают внутреннюю характеристику воздушного судна 1, относящуюся к активированному режиму пилотирования.
Устройство 1 согласно настоящему изобретению, сверх того, содержит средство 27 для сравнения максимально допустимого бокового отклонения Е1, принятого из упомянутого средства 4, с вспомогательным отклонением Е2, принятым из упомянутого средства 24. На Фиг.5 показано отклонение Е3, которое соответствует удвоенному вспомогательному отклонению Е2. Когда максимально допустимое боковое отклонение Е1 становится меньше, чем вспомогательное отклонение Е2, упомянутое средство 1 издает соответствующий тревожный сигнал. В этом случае активированный режим пилотирования не позволяет воздушному судну А оставаться в коридоре полета. Это имеет место либо вследствие деградации характеристики наведения (увеличения отклонения между маркерами 25 и 26), или вследствие деградации навигационной характеристики (уменьшения отклонения между индикаторами 13 и 14, как в примере с Фиг.5). В этом случае издаваемый тревожный сигнал может быть того же типа, что и указанный выше.
Набор индикаций 11 и символ 10 отображаются на зоне 28 отображения просмотрового экрана 8. Эта зона 28 отображения показана на Фиг.6-8. Согласно настоящему изобретению упомянутые маркеры 13 и 14 могут быть графически показаны различным образом. В качестве примера упомянутые маркеры 13 и 14 могут быть представлены:
- в форме двух скобок, связанных дуг с другом и формирующих набор 29, как проиллюстрировано на Фиг.2-5;
- в форме скобок 30, как проиллюстрировано на Фиг.6;
- в форме поверхностей 31, как проиллюстрировано на Фиг.7; или
- в форме наборов 32, содержащих соединенные друг с другом скобку и поверхность, как проиллюстрировано на Фиг.8.
Дополнительно, в особом варианте осуществления упомянутые средства 3, 4, 24 и 27 образуют часть центрального блока 33, который соединен посредством связей 34-38 соответственно с набором 2, средством 23, базой 22 данных, системой 7 отображения и средством 18 тревоги, как показано на Фиг.1. Упомянутый центральный блок 33 соответствует, например, системе управления полетом типа FMS (Flight Management System - Система Управления Полетом).
Изобретение относится к области приборостроения и может найти применение для отображения состояния летательного аппарата (ЛА). Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство содержит средство для определения текущего положения воздушного судна (А), средство для определения, по меньшей мере, одного максимально допустимого отклонения (Е1) от установленного положения ЛА от траектории полета. При этом характеристики точности и целостности измерения текущего положения ЛА определяют согласно ограничению области полета. Разрешенную область полета или коридор (6А, 6В) полета отображают на просмотровом экране (9). Этой области соответствует, по меньшей мере, одна шкала (9) дальности и, по меньшей мере, один неподвижный символ (10), отображающий текущее положение ЛА, и два подвижных указателя (13, 14), отображающие границы упомянутого максимально допустимого отклонения (Е1). 4 н. и 17 з.п. ф-лы, 8 ил.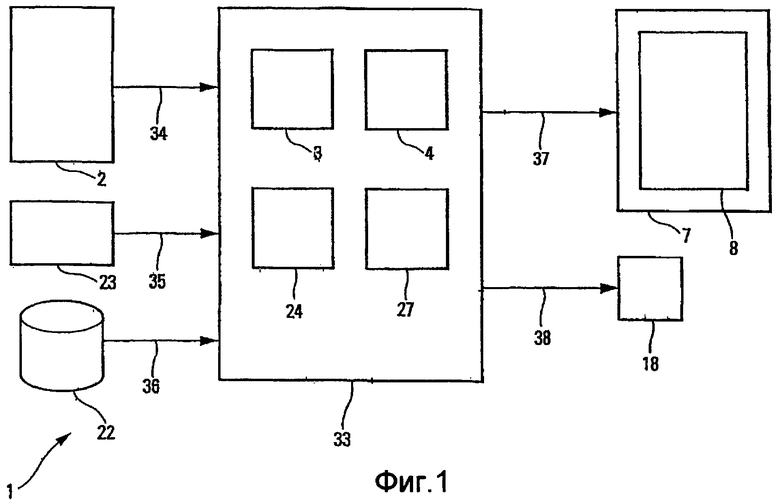
1. Способ отображения для воздушного судна, которое следует плану полета, в котором автоматически и повторяющимся образом выполняются последовательные этапы, на которых:
a) вычисляют действительное положение воздушного судна (А);
b) определяют, по меньшей мере, одно максимально допустимое отклонение (Е1) от заданного положения на траектории (5) полета, обусловленной упомянутым планом полета, в зависимости, с одной стороны, от характеристики, относящейся к точности и целостности вычисления упомянутого действительного положения воздушного судна (А) и, с другой стороны, от ограничения, относящегося к зоне полета, которая допустима в коридоре (6А, 6В) полета, связанном с упомянутым планом полета; и
c) на, по меньшей мере, одном просмотровом экране (8) представляют, по меньшей мере, одну шкалу (9) дальности, и на этой шкале (9) дальности представляют, по меньшей мере:
первый символ (10), который неподвижен и который указывает упомянутое действительное положение, которое принимается как исходное положение; и
два индикатора (13, 14), которые указывают границы (15А, 15В) упомянутого максимально допустимого отклонения (Е1), причем упомянутые индикаторы (13, 14) являются подвижными, и относительно упомянутого первого символа (10) они каждый раз располагаются в соответствии с результатами обработок, выполняемых на упомянутых этапах a) и b).
2. Способ по п.1, в котором, если упомянутые индикаторы (13, 14) передвигаются относительно упомянутого первого символа (10) так, что упомянутый первый символ (10) больше не располагается между этими индикаторами (13, 14), то издается первый тревожный сигнал.
3. Способ по п.1, в котором
на этапе b), кроме того, определяют заданное положение воздушного судна (А), соответствующее положение, требуемое планом полета; и
на этапе с), кроме того, на упомянутом просмотровом экране (8) представляют второй символ (12), который указывает упомянутое заданное положение на шкале (9) дальности, причем упомянутый второй символ (12) является подвижным и относительно упомянутого первого символа (10) он каждый раз располагается в соответствии с результатами обработок, выполняемых на упомянутых этапах а) и b).
4. Способ по п.1, в котором
на этапе b), кроме того, определяют вспомогательное отклонение, которое иллюстрирует характеристику наведения воздушного судна (А), в зависимости от режима пилотирования, активированного, чтобы пилотировать воздушное судно (А); и
на этапе с), кроме того, на упомянутом просмотровом экране (8) представляют два маркера (25, 26), которые указывают на шкале (9) дальности границы (39А, 39В) упомянутого вспомогательного отклонения, причем упомянутые маркеры (25, 26) являются подвижными и относительно упомянутого первого символа (10) они каждый раз располагаются в соответствии с результатами предыдущей обработки.
5. Способ по п.4, в котором
упомянутое максимально допустимое отклонение (Е1) сравнивают с упомянутым вспомогательным отклонением; и
если упомянутое максимально допустимое отклонение (Е1) становится меньше, чем упомянутое вспомогательное отклонение, то издается второй тревожный сигнал.
6. Способ по п.1, в котором упомянутое максимально допустимое отклонение является максимально допустимым боковым отклонением (Е1), и упомянутая траектория полета является боковой траекторией (5) полета.
7. Способ по п.6, в котором на этапе b) как максимально допустимое боковое отклонение (Е1) определяется наименьшая из следующих трех разностей:
разность между ограничением (CV) коридора, относящимся к коридору (6А, 6В) полета, и неопределенностью в вычисленном действительном положении;
разность между удвоенным упомянутым ограничением (CV) коридора и пределом горизонтальной целостности; и
разность между удвоенным упомянутым ограничением (CV) коридора и вероятностью, относящейся к ошибке поперечной навигации.
8. Способ по п.1, в котором упомянутое максимально допустимое отклонение является максимально допустимым вертикальным отклонением, и упомянутая траектория полета является вертикальной траекторией полета.
9. Способ по п.1, в котором упомянутое максимально допустимое отклонение является продольным отклонением согласно траектории полета.
10. Способ по п.1, в котором упомянутая шкала (9) дальности является неизменяемой.
11. Способ по п.1, в котором на этапе с) представляют одну или более из следующих шкал (9) дальности:
боковую шкалу;
продольную шкалу и
вертикальную шкалу.
12. Способ по п.1, в котором на этапе с) на одной и той же шкале (9) дальности, соответствующей горизонтальному отклонению, выполняют комбинированное отображение бокового и продольного отклонений.
13. Устройство отображения для воздушного судна, которое следует плану полета, которое содержит
первое средство (2) для вычисления действительного положения воздушного судна (А);
третье средство (4) для определения, по меньшей мере, одного максимально допустимого отклонения (Е1) от заданного положения на траектории (5) полета, обусловленной упомянутым планом полета, в зависимости, с одной стороны, от характеристики, относящейся к точности и целостности вычисления упомянутого действительного положения воздушного судна (А), и, с другой стороны, от ограничения, относящегося к зоне полета, которая допустима в коридоре (6А, 6В) полета, связанном с упомянутым планом полета; и
систему (7) отображения для представления на, по меньшей мере, одном просмотровом экране (8), по меньшей мере, одной шкалы (9) дальности, а также для представления на этой шкале (9) дальности
первого символа (10), который является неподвижным и который указывает упомянутое действительное положение, которое принимается как исходное положение;
двух индикаторов (13, 14), которые указывают границы (15А, 15В) упомянутого максимально допустимого отклонения (Е1), причем упомянутая система (7) отображения сформирована, чтобы перемещать упомянутые индикаторы (13, 14), которые являются подвижными, так, чтобы относительно упомянутого первого символа (10) они каждый раз располагались в соответствии с результатами обработок, выполняемых посредством упомянутого первого, второго и третьего средств (2, 4).
14. Устройство по п.13, которое сверх того содержит второе средство (3) для определения заданного положения воздушного судна (А), соответствующего положению, которое требуется планом полета, и что упомянутая система (7) отображения сверх того представляет на упомянутом просмотровом экране (8) второй символ (12), который указывает упомянутое заданное положение на шкале (9) дальности, причем упомянутая система (7) отображения сформирована, чтобы перемещать упомянутый второй символ (12), который является подвижным, так, чтобы относительно упомянутого первого символа (10) он каждый раз располагался в соответствии с результатами обработок, выполняемых упомянутым первым и вторым средствами (2, 3).
15. Устройство по п.13, которое сверх того содержит четвертое средство (24) для определения вспомогательного отклонения, которое иллюстрирует характеристику наведения воздушного судна, в зависимости от активированного режима пилотирования, и что упомянутая система (7) отображения сверх того представляет на упомянутом просмотровом экране (8) два маркера (25, 26), которые указывают на шкале (9) дальности границы (29А, 29В) упомянутого вспомогательного отклонения, причем упомянутая система (7) отображения сформирована, чтобы перемещать упомянутые маркеры (25, 26), которые являются подвижными, так, чтобы относительно упомянутого первого символа (10) они каждый раз располагались в соответствии с результатами обработок, выполняемых упомянутым четвертым средством (24).
16. Устройство по п.13, которое сверх того содержит средство (18), способное издавать, по меньшей мере, один тревожный сигнал.
17. Устройство по п.13, которое сверх того содержит базу (23) данных, содержащую величины (CV) ограничений, относящиеся к коридору (6А, 6В) полета, который связан с планом полета.
18. Устройство по п.13, в котором, по меньшей мере, упомянутое третье средство (3) образует часть системы управления полетом воздушного судна (А).
19. Устройство по п.13, в котором упомянутый просмотровый экран (8) является основным пилотажным экраном.
20. Воздушное судно, которое содержит систему (1), способную осуществлять способ по п.1.
21. Воздушное судно, которое содержит устройство (1) по п.13.
| US 2004111192 A1, 10.06.2004 | |||
| US 6255965 A, 03.07.2001 | |||
| EP 0775953 A1, 28.05.1997 | |||
| WO 2005069094 A, 28.05.2005 | |||
| US 4144571 A, 13.03.1979 | |||
| Регулируемая тепловая труба | 1980 |
|
SU937963A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

