Настоящее изобретение относится к системе наведения летательного аппарата.
Более точно, оно относится к системе наведения такого типа, которая содержит, по меньшей мере:
- базу данных, содержащую, по меньшей мере, данные, относящиеся к местности, над которой должен лететь летательный аппарат;
- приводимое в действие средство выбора, позволяющее пилоту летательного аппарата выбирать особый режим наведения;
- вычислитель, определяющий при выборе режима наведения, например режима захода на посадку, инструкции наведения, зависящие от, по меньшей мере, одного элемента данных (ось, путь и т.д.):
• который содержит, по меньшей мере, один конкретный параметр (угол наклона, высоту над уровнем моря географической точки и т.д.);
• который получают из упомянутой базы данных; и
• который должен использоваться для упомянутого выбранного режима наведения; и
- средства отображения, содержащие, по меньшей мере, один экран индикации.
Настоящее изобретение применяется, в частности, для автономного захода на взлетно-посадочную полосу, в частности, в области военной техники. Его также можно применять в гражданских программах, относящихся к процедурам захода на посадку, ухода на второй круг или взлета без средства помощи при посадке на землю, такого как системы типа LS (СП, система посадки), такие как ILS (СИП, система инструментальной посадки), GLS (СПГ, система посадки по глобальной спутниковой навигационной системе), MLS (ССП, СВЧ-система посадки) и так далее, с высокой точностью и безошибочностью, то есть когда уровни параметров летательного аппарата представляют почти такое же ограничение, как при точных заходах на посадку.
В контексте настоящего изобретения считается, что при автономном заходе на посадку летательный аппарат должен лететь в метеорологических условиях полета по приборам типа IMC («Instrument Meteorological Conditions») до высоты принятия решения, например 200 футов (приблизительно 60 метров), которая соответствует высоте принятия решения при точном заходе на посадку для системы типа ILS («Instrument Landing System», а именно системы посадки по приборам) без использования средств навигации, размещенных на земле. При таком автономном заходе на посадку средства определения местоположения, используемые летательным аппаратом, представляют собой, следовательно, исключительно бортовые средства и, в частности, систему спутниковой навигации, например, типа GNSS («Global Navigation Satellite System»), такую как Galileo или Глобальную систему позиционирования GPS («Global Positioning System»), инерционный модуль и барометрические датчики. То же относится к процедуре захода на посадку, ухода на второй круг или взлета упомянутого выше типа.
При заходе на посадку на упомянутой высоте принятия решения экипаж летательного аппарата должен визуально определить взлетно-посадочную полосу. Если это так, он заканчивает посадку в визуальном режиме, используя наведение вручную. С другой стороны, если на этой высоте принятия решения экипаж не видит взлетно-посадочную полосу, он должен выполнить уход на второй круг, при этом он снова переводит летательный аппарат на заданную безопасную высоту.
Траекторию захода на посадку, используемую при выполнении такого автономного захода на посадку, формируют перед полетом и описывают на бумажной карте, которая доступна для экипажа во время полета. С этой целью анализируют конфигурацию местности вокруг взлетно-посадочной полосы и определяют запас по отношению к препятствиям, которые были определены. Такую траекторию захода на посадку также сохраняют в упомянутой базе данных системы наведения.
Также во время полета, когда экипаж принимает решение лететь, используя автономный заход на посадку или процедуру захода на посадку, ухода на второй круг или взлета с высокой точностью и безошибочностью, он вводит соответствующую процедуру в план полета, используя упомянутое средство выбора, которое, в общем, соответствует средству интерфейса вычислительной системы самолетовождения. Упомянутая вычислительная система самолетовождения затем формирует на основе упомянутой информации, полученной из базы данных, опорную траекторию (соответствующую виртуальной линии захода на посадку в случае автономного захода на посадку). Из этой опорной траектории и на основе текущего положения в трех измерениях летательного аппарата, которое известно при помощи бортовых средств, упомянутый вычислитель системы наведения рассчитывает инструкции наведения, которым следуют обычно автоматически с помощью автопилота летательного аппарата или которые экипаж выполняет вручную, используя пилотажный командный прибор.
Однако перед воплощением такого автономного захода на посадку или такой процедуры захода на посадку, ухода на второй круг или взлета с высокой точностью и безошибочностью экипаж должен надежно обеспечить опорную траекторию, используемую вычислителем для расчета инструкций наведения. На практике, такая опорная траектория считается критической, поскольку ошибка, содержащаяся в ней, может привести к тому, что летательный аппарат полетит по неправильной траектории и при этом возникнет риск, что летательный аппарат выйдет из области полета, которая является безопасной, относительно препятствий. В этом случае может произойти столкновение летательного аппарата с элементами рельефа или внешними препятствиями.
Обычно для надежного обеспечения такой опорной траектории экипаж сравнивает информацию, относящуюся к этой опорной траектории, которая обозначена на упомянутой бумажной карте, находящейся в его распоряжении, с информацией, относящейся к упомянутой опорной траектории, которую отображает упомянутый вычислитель на экране индикации средств отображения.
Однако в контексте автономного захода на посадку такая проверка представляет собой очень большую нагрузку на экипаж, в частности, когда летательный аппарат является военным самолетом, рабочая нагрузка в котором увеличивается в соответствии с тактической ситуацией последнего (возможно, он находится на территории противника, в частности, с обязанностью наблюдать присутствие возможных угроз). Рабочая нагрузка, связанная с такой проверкой, велика, в частности, поскольку данные, относящиеся к линии захода на посадку, включают в себя, в частности, значения широты и долготы географической точки, значения, каждое из которых содержит большое количество цифр, которые требуется сверять. Кроме того, вероятность ошибок со стороны экипажа во время проверки в такой ситуации повышается из-за существующего стресса.
Кроме того, в контексте процедуры захода на посадку, ухода на второй круг или взлета с высокой точностью и безошибочностью выполняемое пилотом сравнение характеристик процедуры с бумажной картой не позволяет достичь требуемого уровня безошибочности (вероятность ошибки меньше чем 10-9 для каждой процедуры).
Цель настоящего изобретения состоит в устранении таких недостатков. Оно относится к системе наведения летательного аппарата, в частности гражданского или военного транспортного самолета, которая позволяет экипажу летательного аппарата быстро, безопасно и эффективно отслеживать заданные данные, которые используют при особом режиме наведения летательного аппарата (в частности, при автономном заходе на посадку) для определения инструкций наведения летательного аппарата.
С этой целью в соответствии с изобретением упомянутая система наведения такого типа содержит, по меньшей мере:
- одну навигационную базу данных;
- одно приводимое в действие средство выбора, позволяющее пилоту летательного аппарата выбирать особый режим наведения;
- один вычислитель, определяющий при выборе режима наведения инструкции наведения, зависящие от, по меньшей мере, одного элемента данных:
• который содержит, по меньшей мере, один особый параметр;
• который получают из упомянутой базы данных; и
• который должен использоваться для упомянутого выбранного режима наведения; и
- средства отображения, содержащие, по меньшей мере, один экран индикации, отличающаяся тем, что:
упомянутая система наведения включает в себя вспомогательные средства (уточняемые ниже) для создания идентификационной характеристики буквенно-цифрового типа, предпочтительно определяемой с использованием циклического избыточного кода и позволяющей идентифицировать упомянутый элемент данных, который должен использоваться для упомянутого выбранного режима наведения; и
упомянутые средства отображения выполнены таким образом, чтобы автоматически представлять упомянутую идентификационную характеристику буквенно-цифрового типа на упомянутом экране индикации при выборе упомянутого режима наведения.
Таким образом, благодаря изобретению элемент данных (заранее записанный в базе данных), который используется упомянутым вычислителем для расчета инструкций наведения летательного аппарата, отображают в виде идентификационной характеристики, которую представляют, используя сокращенный код, и которую поэтому просто и легко отслеживать, как уточнено ниже.
Следовательно, если элемент данных, который таким образом отображают в виде идентификационной характеристики на экране индикации, также представлен в этом виде на бумажной карте, находящейся в распоряжении экипажа, для последнего становится просто и легко выполнять упомянутую выше проверку, состоящую в сравнении двух идентификационных характеристик, каждая из которых имеет сокращенное количество буквенно-цифровых элементов (цифр и/или букв).
В частном варианте выполнения:
- упомянутая система наведения также содержит:
• по меньшей мере, одно средство наведения, например автопилот или пилотажный командный прибор, которое предназначено для помощи при наведении летательного аппарата с использованием инструкций наведения, определяемых упомянутым вычислителем; и
• приводимое в действие средство подключения, позволяющее пилоту летательного аппарата подключать выбранный режим наведения, что позволяет автоматически передавать упомянутые инструкции наведения из упомянутого вычислителя в упомянутое средство наведения с целью их использования для наведения летательного аппарата; и
- упомянутый вычислитель выполнен таким образом, чтобы фиксировать упомянутый используемый элемент данных с момента подключения упомянутого режима наведения и до тех пор, пока упомянутый режим наведения остается подключенным.
В первом варианте выполнения упомянутые вспомогательные средства включают в себя упомянутый вычислитель, который выполнен таким образом, чтобы автоматически определять, используя особое средство кодирования, при выборе упомянутого режима наведения, причем упомянутая идентификационная характеристика буквенно-цифрового типа позволяет идентифицировать упомянутый элемент данных, который должен использоваться для упомянутого выбранного режима наведения.
Кроме того, в этом первом варианте выполнения:
- упомянутая система наведения выполнена таким образом, чтобы наводить летательный аппарат, по меньшей мере, на этапе автономного (как упомянуто выше) захода на взлетно-посадочную полосу, вдоль виртуальной линии захода на посадку;
- упомянутая база данных включает в себя, в качестве данных, по меньшей мере, упомянутую виртуальную линию захода на посадку, которая определена множеством параметров; и
- упомянутый вычислитель формирует идентификационную характеристику, которая позволяет идентифицировать упомянутые параметры, которые определяют упомянутую виртуальную линию захода на посадку.
В этом случае, предпочтительно, упомянутая линия захода на посадку определена следующими пятью параметрами: магнитная ориентация, наклон и широта, долгота и высота точки привязки (которая, например, расположена на высоте на 50 футов выше земли), и упомянутый вычислитель формирует идентификационную характеристику, содержащую пять буквенно-цифровых идентификационных элементов (цифры и/или буквы), которые соответственно идентифицируют упомянутые пять параметров.
Кроме того, предпочтительно упомянутый вычислитель содержит средство кодирования, использующее циклический избыточный код обычного типа.
Кроме того, во втором варианте выполнения упомянутые вспомогательные средства включают в себя упомянутую навигационную базу данных, которая содержит упомянутую идентификационную характеристику буквенно-цифрового типа, позволяющую идентифицировать упомянутый элемент данных, который должен использоваться для упомянутого выбранного режима наведения. Предпочтительно эта идентификационная характеристика также была сформирована с помощью циклического избыточного кода упомянутого выше типа.
В этом втором варианте выполнения упомянутая система выполнена таким образом, чтобы наводить летательный аппарат вдоль опорной траектории на одном из следующих этапов (как упомянуто выше), которые являются автономного типа и имеют высокую безошибочность и точность: этап захода на посадку, этап ухода на второй круг и этап взлета; и упомянутая база данных включает в себя, по меньшей мере, упомянутую опорную траекторию, как данные, и идентификационную характеристику, позволяющую идентифицировать упомянутую опорную траекторию.
В этом случае, предпочтительно, упомянутый вычислитель выполнен таким образом, чтобы автоматически сравнивать упомянутую опорную траекторию, принятую из упомянутой базы данных, с упомянутой соответствующей идентификационной характеристикой, также принятой из упомянутой базы данных, и, если результат такого сравнения показывает, что эти элементы являются идентичными, упомянутые средства отображения автоматически представляют упомянутую опорную траекторию и упомянутую соответствующую идентификационную характеристику на упомянутом экране индикации.
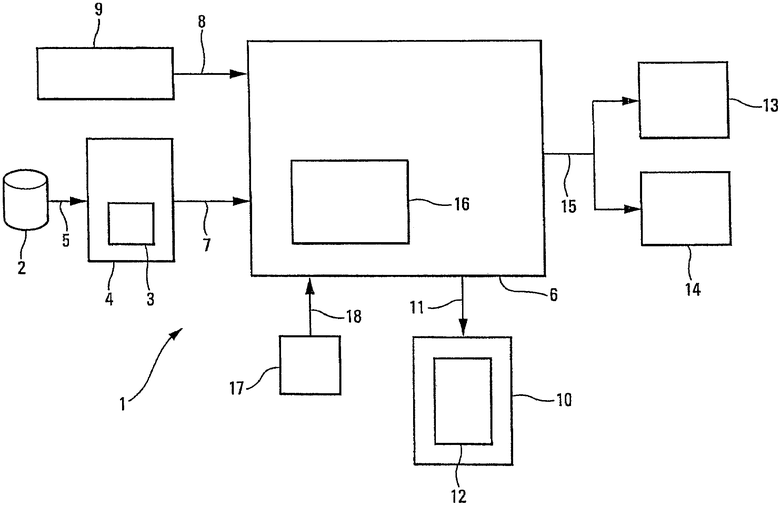
На чертеже ясно представлено, как изобретение может быть воплощено. На чертеже показана блок-схема системы наведения в соответствии с изобретением.
Система 1 в соответствии с изобретением, схематично представленная на чертеже, предназначена для наведения летательного аппарата (не показан), в частности военного или гражданского транспортного самолета.
Эта система 1 наведения, которая является бортовой, представляет собой систему такого типа, которая содержит:
- навигационную базу 2 данных, включающую в себя, по меньшей мере, данные, относящиеся к местности, над которой должен пролететь летательный аппарат;
- средство 3 выбора, которое приводится в действие и которое предоставляет пилоту летательного аппарата возможность выбирать особый режим наведения, и которое, например, представляет собой часть вычислительной системы 4 самолетовождения типа FMS («Flight Management System»), которая может быть соединена через соединение 5 с упомянутой базой 2 данных;
- вычислитель 6, например вычислитель наведения типа FG («Flight Guidance»), который соединен через соединение 7 с упомянутой вычислительной системой 4 самолетовождения и через соединение 8 с набором 9 источников информации. Этот набор 9 не описан здесь подробно, но включает в себя, например, средство определения в трех измерениях текущего положения летательного аппарата во время полета;
- средства 10 отображения, которые соединены через соединение 11 с упомянутым вычислителем 6 и которые выполнены с возможностью отображать информацию на экране 12 индикации; и
- обычные средства наведения, например автопилот 13 и пилотажный командный прибор 14, которые соединены через соединение 15 с упомянутым вычислителем 6 и которые предназначены для помощи при наведении летательного аппарата, используя инструкции наведения, определяемые упомянутым вычислителем 6.
Вычислитель 6 определяет при выборе особого режима наведения, используя упомянутое средство 3 выбора, инструкции наведения, которые относятся к этому особому режиму наведения и которые зависят от, по меньшей мере, одного элемента данных (траектория, профиль, положение и т.д.):
- который содержит, по меньшей мере, один особый параметр (позволяющий определять или характеризовать этот элемент данных);
- который получают из упомянутой базы 2 данных; и
- который должен использоваться для упомянутого выбранного режима наведения при помощи упомянутого средства 3 выбора.
Для того чтобы обеспечить возможность для экипажа летательного аппарата быстро и безопасно отслеживать заданные данные, которые используются упомянутым вычислителем 6 для определения инструкций наведения в конкретном режиме наведения, упомянутые средства 10 отображения выполнены в соответствии с изобретением таким образом, чтобы автоматически представлять на упомянутом экране 12 индикации идентификационную характеристику буквенно-цифрового типа, позволяющую идентифицировать, по меньшей мере, один элемент данных, который должен использоваться для упомянутого выбранного режима наведения.
Таким образом, система 1 в соответствии с изобретением отображает через упомянутые средства 10 отображения в виде идентификационной характеристики, по меньшей мере, один элемент данных (описан ниже), который заранее записан в базе 2 данных и который используется вычислителем 6 для расчета инструкций наведения летательного аппарата. Кроме того, эту идентификационную характеристику представляют в виде сокращенного кода (буквенно-цифрового типа), что позволяет его быстро и надежно отслеживать.
Кроме того, если элемент данных, который таким образом отображается на экране 12 индикации в виде идентификационной характеристики, также представлен в этом же виде на другом носителе, например на бумажной карте, которая находится в распоряжении экипажа, для экипажа летательного аппарата становится просто и легко проверять, является ли элемент данных, отображаемый и используемый вычислителем 6, действительно соответствующим требуемым элементом данных, который представлен на этом другом носителе. Такое сравнение может быть выполнено просто и быстро, поскольку каждая из двух идентификационных характеристик представляет сокращенное число буквенно-цифровых элементов, а именно сокращенное число цифр и/или букв, как описано ниже.
Конечно, если экипаж должен проверить множество данных, которые одновременно используются вычислителем 6 для расчета инструкций наведения, система 1 предусматривает идентификационную характеристику для каждого из этих элементов данных, и средства 10 отображения одновременно отображают все эти идентификационные характеристики.
Каждый элемент данных может содержать один параметр или множество параметров. В последнем случае выполняют кодирование для каждого из различных параметров, в частности, используя средство 16 кодирования, которое, например, интегрировано в упомянутый вычислитель 6, и полученная в результате идентификационная характеристика содержит множество элементов, соответствующим образом соответствующих этим различным параметрам. В предпочтительном варианте воплощения упомянутое средство 16 кодирования использует циклический избыточный код обычного типа. В конкретном варианте выполнения способ кодирования, используемый этим средством 16 кодирования, должен гарантировать заданную вероятность ошибки (кодирования), например, 10-9.
Кроме того, в первом варианте выполнения упомянутая система 1 наведения выполнена таким образом, чтобы позволять наводить летательный аппарат, по меньшей мере, на этапе автономного захода на взлетно-посадочную полосу. Как обозначено выше, такой этап захода на посадку может выполняться по виртуальной линии захода на посадку, которую определяют перед полетом, для обеспечения защитной области траектории летательного аппарата относительно препятствий и рельефа местности, над которой он пролетает. Известно, что такая виртуальная линия захода на посадку представляется с помощью:
- точки привязки, для которой должны быть известны широта, долгота и высота;
- магнитная ориентация; и
- значение наклона.
В этом случае упомянутый вычислитель 6 выполнен таким образом, чтобы автоматически определять при помощи интегрированного средства 16 кодирования, при выборе упомянутого режима наведения, идентификационную характеристику буквенно-цифрового типа, которая позволяет идентифицировать упомянутый элемент данных, который должен быть использован для упомянутого выбранного режима наведения.
В этом первом варианте выполнения элемент данных, который должен быть кодирован, представляет таким образом упомянутую виртуальную линию захода на посадку и содержит пять параметров, а именно магнитную ориентацию, наклон, широту точки привязки, долготу этой точки привязки и высоту упомянутой точки привязки. Таким образом, вычислитель 6 формирует идентификационную характеристику, которая предпочтительно содержит пять буквенно-цифровых идентификационных элементов, например пять цифр или пять букв, которые соответственно идентифицируют предыдущие пять параметров.
Кроме того, в данном первом варианте выполнения упомянутое выше кодирование выполняют на двух уровнях:
- перед полетом, когда упомянутую виртуальную линию захода на посадку определяют на земле. Определенную идентификационную характеристику затем перезаписывают на карту захода на посадку (которая находится в распоряжении экипажа летательного аппарата во время последующего полета); и
- во время полета посредством вычислителя 6 при помощи, в частности, информации, принимаемой из упомянутой базы 2 данных. Идентификационную характеристику, определенную упомянутым вычислителем 6, отображают на экране 12 индикации, как указано выше.
Следовательно, в этом первом варианте выполнения во время полета летательного аппарата экипаж выбирает при помощи средства 3 выбора вычислительной системы 4 самолетовождения автономный заход на посадку, последний введен в план полета летательного аппарата, и вычислительная система 4 самолетовождения извлекает из базы 2 данных параметры, которые определяют виртуальную линию захода на посадку, ассоциированную с этим автономным заходом на посадку. Эти параметры передают с помощью вычислительной системы 4 самолетовождения в вычислитель 6, который затем вычисляет соответствующую идентификационную характеристику и отображает ее на экране 12 индикации. В этот момент экипаж должен выполнить первую проверку этой идентификационной характеристики путем ее сравнения с характеристикой, которая обозначена на карте захода на посадку, находящейся в распоряжении экипажа. Когда автономный заход на посадку в конечном счете разрешен, например, диспетчером службы управления воздушным движением, который расположен на земле, экипаж подключает автономный заход на посадку, используя средство 17 подключения, которое соединено через соединение 18 с упомянутым вычислителем 6, то есть экипаж соединяет автопилот 13 и/или пилотажный командный прибор 14 с инструкциями наведения автономного захода на посадку, определенными вычислителем 6. Эти инструкции наведения рассчитывают на основании упомянутых выше параметров, которые определяют виртуальную линию захода на посадку, и на основе текущего положения в трех измерениях летательного аппарата, принятых из упомянутого набора 9. В этот момент по процедуре экипаж должен снова проверить идентификационную характеристику, отображаемую, по меньшей мере, на упомянутом экране 12 индикации, с характеристикой, обозначенной на карте захода на посадку. Параллельно с этим вычислитель 6 фиксирует используемые параметры, относящиеся к линии захода на посадку, таким образом, что эти параметры больше не могут быть изменены, пока заход на посадку остается подключенным или включенным. Если экипаж желает выполнить новый заход на посадку, он должен выключить текущий заход на посадку перед выбором нового захода на посадку при помощи средства 3 выбора.
Кроме того, во втором варианте выполнения упомянутая система 1 наведения выполнена таким образом, чтобы наводить летательный аппарат по опорной траектории на одном из следующих этапов: этап захода на посадку, этап ухода на второй круг и этап взлета. Эти этапы являются автономными в области гражданской авиации и представляют высокую степень безошибочности и точности. В этом случае, упомянутая база 2 данных включает в себя, по меньшей мере, упомянутую опорную траекторию как данные, а также идентификационную характеристику, которая позволяет идентифицировать эту опорную траекторию. Эту идентификационную характеристику определяют разработчики процедур и внедряют в навигационную базу 2 данных с соответствующей процедурой, которая содержит совокупность элементов, необходимых для определения опорной траектории (точки маршрута («waypoint»), траектории между последовательными точками маршрута, наклоны и т.д.). Эта идентификационная характеристика автоматически проверяется вычислителем 6 (вычислитель наведения полета), который представляет очень высокий уровень безошибочности, каждый раз, когда передают опорную траекторию. Эту опорную траекторию и соответствующую идентификационную характеристику также отображают для проверки пилотом.
Назначение идентификационной характеристики состоит в том, чтобы гарантировать с хорошим уровнем вероятности совокупность параметров, которые определяют опорную траекторию, используемую вычислителем 6 при процедуре захода на посадку, ухода на второй круг или взлета, и обеспечить проверку экипажем безопасности этой опорной траектории, используя этот новый параметр. Идентификационную характеристику определяют, используя способ кодирования идентификационной характеристики, который применяют для каждого из параметров опорной траектории, безопасность которой обеспечивается. Способ кодирования должен обеспечить вероятность ошибки 10-9 для параметров опорной траектории.
Следует отметить, что опорную траекторию определяют разработчики процедуры так, чтобы получить заданные запасы относительно препятствий и рельефа местности. Опорную траекторию поэтому обычно представляют в виде последовательности точек маршрута (идентифицированных по долготе, широте и высоте) и сегментами прямой линии или кривой линии. Ее сохраняют в базе 2 данных и выбирают, используя ее идентификационную характеристику.
В контексте процедуры захода на посадку, ухода на второй круг или взлета с высокой точностью и безошибочностью параметры опорной траектории передают с помощью вычислительной системы 4 самолетовождения (из базы 2 данных) в вычислитель 6 (наведения полета). То же относится к соответствующей идентификационной характеристике. Вычислитель 6 (наведения полета) затем проверяет соответствие между этой идентификационной характеристикой и параметрами опорной траектории. Если проверка будет успешно проведена, эту траекторию утверждают и пилот может использовать ее благодаря средствам наведения. В противном случае, опорную траекторию признают недействительной, что предотвращает полет летательного аппарата вдоль этой опорной траектории с использованием средств наведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ПО МЕНЬШЕЙ МЕРЕ, ВО ВРЕМЯ АВТОНОМНОГО ЗАХОДА НА ПОСАДКУ | 2007 |
|
RU2384889C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| УСТРОЙСТВО ПОМОЩИ В ЗАХОДЕ НА ПОСАДКУ С НАВЕДЕНИЕМ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2362976C1 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ В ПИЛОТИРОВАНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ АВТОНОМНОГО ЗАХОДА НА ПОСАДКУ | 2007 |
|
RU2383931C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ БЕЗДВИГАТЕЛЬНОЙ ПОСАДКЕ | 2005 |
|
RU2321524C2 |
| УСТРОЙСТВО ДЛЯ ПОМОЩИ В ПИЛОТИРОВАНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ВО ВРЕМЯ ЭТАПА ЗАХОДА НА ПОСАДКУ С ЦЕЛЬЮ ПРИЗЕМЛЕНИЯ | 2007 |
|
RU2381563C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
Изобретение относится к области приборостроения и может найти применение в системах навигации летательных аппаратов (ЛА). Технический результат - расширение функциональных возможностей. Для достижения данного результата система наведения содержит средства для создания буквенно-цифровой идентификационной характеристики траектории навигации ЛА. При этом эти характеристики позволяют идентифицировать элементы данных, которые должны использоваться для выбранного режима наведения летательного аппарата. Средства отображения ЛА автоматически представляют буквенно-цифровую идентификационную характеристику на экране индикации состояния ЛА, обеспечивая заданный уровень точности захода ЛА на посадку. 2 н. и 8 з.п. ф-лы, 1 ил.
1. Система наведения летательного аппарата, причем упомянутая система (1) наведения содержит, по меньшей мере,
навигационную базу (2) данных;
приводимое в действие средство (3) выбора, позволяющее пилоту летательного аппарата выбирать конкретный режим наведения;
вычислитель (6), определяющий при выборе режима наведения инструкции наведения, зависящие, по меньшей мере, от одного элемента данных:
который содержит, по меньшей мере, один конкретный параметр, позволяющий определить этот элемент данных;
который получают из упомянутой базы данных; и
который должен использоваться для упомянутого выбранного режима наведения; и
средства (10) отображения, содержащие, по меньшей мере, один экран (12) индикации, при этом
упомянутая система (1) наведения включает в себя вспомогательные средства (2, 6) для создания идентификационной характеристики буквенно-цифрового типа, позволяющей идентифицировать упомянутый элемент данных, который должен использоваться для упомянутого выбранного режима наведения; и
упомянутые средства (10) отображения автоматически представляют упомянутую идентификационную характеристику буквенно-цифрового типа на упомянутом экране (12) индикации при выборе упомянутого режима наведения.
2. Система по п.1, при этом
упомянутая система (1) наведения также содержит
по меньшей мере, одно средство (13, 14) наведения для помощи в наведении летательного аппарата путем использования инструкций наведения, определяемых упомянутым вычислителем (6); и приводимое в действие средство (17) подключения, позволяющее пилоту летательного аппарата подключать выбранный режим наведения так, чтобы обеспечить автоматическую передачу упомянутых инструкций наведения из упомянутого вычислителя (6) в упомянутое средство (13, 14) наведения с целью использования их для наведения летательного аппарата; и
упомянутый вычислитель (6) фиксирует упомянутый используемый элемент данных с момента подключения упомянутого режима наведения и до тех пор, пока упомянутый режим наведения остается подключенным.
3. Система по п.1,
в которой упомянутые вспомогательные средства включают в себя упомянутый вычислитель (6), который автоматически определяет при помощи конкретного средства (16) кодирования при выборе упомянутого режима наведения упомянутую идентификационную характеристику буквенно-цифрового типа, позволяющую идентифицировать упомянутый элемент данных, который должен использоваться для упомянутого выбранного режима наведения.
4. Система по п.3,
при этом она выполнена таким образом, что наводит летательный аппарат, по меньшей мере, на этапе автономного захода на взлетно-посадочную полосу вдоль виртуальной линии захода на посадку, и при этом упомянутая база (2) данных включает в себя, в качестве данных, по меньшей мере, упомянутую виртуальную линию захода на посадку, которая определена множеством параметров, и упомянутый вычислитель (6) формирует идентификационную характеристику, позволяющую идентифицировать упомянутые параметры, которые определяют упомянутую виртуальную линию захода на посадку.
5. Система по п.4,
в которой упомянутая виртуальная линия захода на посадку определена следующими пятью параметрами: магнитная ориентация, наклон и широта, долгота и высота точки привязки, и упомянутый вычислитель (6) формирует идентификационную характеристику, содержащую пять буквенно-цифровых идентификационных элементов, которые соответственно идентифицируют упомянутые пять параметров.
6. Система по п.3,
в которой упомянутый вычислитель (6) содержит средство (16)
кодирования, применяющее циклический избыточный код.
7. Система по п.1,
в которой упомянутые вспомогательные средства включают в себя упомянутую навигационную базу (2) данных, которая содержит упомянутую идентификационную характеристику буквенно-цифрового типа, позволяющую идентифицировать упомянутый элемент данных, который должен использоваться для упомянутого выбранного режима наведения.
8. Система по п.7,
при этом она выполнена таким образом, чтобы наводить летательный аппарат вдоль опорной траектории на одном из следующих этапов, которые являются этапами автономного типа: этап захода на посадку, этап ухода на второй круг и этап взлета, и упомянутая база (2) данных включает в себя, по меньшей мере, упомянутую опорную траекторию в качестве данных и идентификационную характеристику, позволяющую идентифицировать упомянутую опорную траекторию.
9. Система по п.8,
в которой упомянутый вычислитель (6) автоматически сравнивает упомянутую опорную траекторию, принятую из упомянутой базы (2) данных, с упомянутой соответствующей идентификационной характеристикой, также принятой из упомянутой базы (2) данных, и упомянутые средства (10) отображения автоматически представляют упомянутую опорную траекторию и упомянутую соответствующую идентификационную характеристику на упомянутом экране (12) индикации, если результат сравнения, выполненного упомянутым вычислителем (6), указывает, что эти элементы являются идентичными.
10. Летательный аппарат, который содержит систему (1) наведения по п.1.
| US 6693559 B1, 17.02.2004 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| 0 |
|
SU157827A1 | |
| US 5142478 A, 25.08.1992 | |||
| US 4316252 A, 16.02.1982. | |||

