Предлагаемая группа изобретений относится к средствам измерения, сигнализации и управления для широкого класса самолетов, вертолетов, беспилотных летательных аппаратов и в частности для маневренных самолетов.
Значительное число авиационных происшествий с исправными воздушными судами различного назначения связано со столкновением с землей. Сложность предотвращения столкновения с землей обусловлена различными факторами: ошибками экипажа, отсутствием совершенных датчиков впереди лежащего рельефа местности, погрешностями измерителей. Особенно эта задача сложна для маневренных самолетов.
Предлагаемые средства измерения, управления и сигнализации предназначены для повышения безопасности полета вблизи земли.
Известна система раннего предупреждения близости земли (СРПБЗ РШПИ. 461535.004 РЭ-ЛУ ОАО "ВНИИРА"). Известна также система GCAS (ground collision avoidance system) - система предупреждения столкновения с землей для высокоманевренных самолетов. (Joint development of an auto GCAS, Donald E. Swihart.Artur F. Barfield, Flight Dinamics Directorate Wright Laboratory AFB OH 454333, Stockholm, Sweden). Известна группа изобретений "Способ предупреждения столкновения летательного аппарата с землей и устройство на его основе" патент RU № 2262746 от 10.06.2004 г.
В этих системах осуществляется мониторинг ("информационное сканирование") рельефа местности и определяется его профиль в упрежденной полосе по линии пути летательного аппарата, причем время упреждения задается априори.
Недостатком этих систем является формирование зоны мониторинга рельефа местности без учета текущих динамических характеристик летательного аппарата (ЛА). Завышение времени упреждения приводит к снижению точности прогнозирования траектории полета, что снижает достоверность выдаваемых сигналов. Практика показывает большую вероятность выдачи ложных предупреждений (до 73%). Занижение времени упреждения приводит к пропускам сигналов опасности и, как следствие, к столкновению с землей.
Эта проблема усугубляется для маневренных летательных аппаратов, размер и конфигурация зоны мониторинга которых зависит от режима применения, параметров полета и может в частности иметь форму круга для случая крутого пикирования.
Известна "Система предотвращения столкновения с землей" патент US № 4924401 от 08.05.1990 г.
В этой системе вычисляется потеря высоты при включении автоматического увода от земли, на основе которой вычисляется высота включения автоматического увода. При этом отсчет высоты включения автоматического увода осуществляется от некоторого уровня, который задается заранее и должен превышать высоту препятствий в районе полета. Это ограничивает возможности маневрирования и скрытного полета вблизи земли. Кроме того, траектория автоматического увода формируется без учета текущей располагаемой нормальной перегрузки автоматического управления ЛА, что может привести к критичной потере скорости ЛА.
В основу изобретения положено решение задачи предотвращения столкновения летательного аппарата с земной поверхностью при маневрировании вблизи земли.
Эта задача решается путем вычисления высоты включения автоматического увода от земли с учетом высоты препятствий в зоне текущего маневра летательного аппарата и формирования траектории автоматического увода с учетом степени пересеченности рельефа местности в этой зоне и текущей располагаемой нормальной перегрузки автоматического управления ЛА.
Особое значение предлагаемое изобретение имеет для маневренных самолетов, где задача обеспечения безопасности полета решается экипажем наряду с другими задачами по управлению самолетом и его системами.
Поставленная цель достигается тем, что в способе предотвращения столкновения летательного аппарата с рельефом местности, при котором измеряют параметры положения и движения летательного аппарата, вычисляют потерю высоты при включении автоматического увода, на основе которой вычисляют высоту включения автоматического увода, осуществляют автоматический увод от земли при снижении летательного аппарата до высоты включения автоматического увода, согласно изобретению определяют максимальную высоту рельефа местности в зоне мониторинга рельефа местности, относительно которой вычисляют высоту включения автоматического увода, а траекторию автоматического увода формируют в зависимости от пересеченности рельефа местности в этой зоне.
Поставленная цель достигается также и тем, что в способе мониторинга рельефа местности, при котором предварительно запоминают базу данных рельефа местности, определяют параметры положения и движения летательного аппарата, определяют погрешность счисления координат местоположения летательного аппарата и вычисляют координаты границы зоны мониторинга рельефа местности, на основе которых и с использованием базы данных высот рельефа местности формируют в быстродействующем запоминающем устройстве временную базу данных высот рельефа местности, осуществляют мониторинг рельефа местности путем обработки данных временной базы данных высот рельефа местности, согласно изобретению вычисляют время упреждения, с учетом которого вычисляют координаты границы зоны мониторинга рельефа местности.
Поставленная цель достигается также и тем, что вычисляют постоянную времени контура управления высотой полета летательного аппарата, на основе которой вычисляют время упреждения.
Поставленная цель достигается также и тем, что определяют минимальную высоту рельефа местности в зоне мониторинга рельефа местности, вычисляют рассогласование между максимальной и минимальной высотами рельефа местности, вычисляют отношение указанного рассогласования к размеру зоны мониторинга рельефа местности в направлении полета, на основе которого вычисляют показатель пересеченности рельефа местности.
Поставленная цель достигается также и тем, что в способе автоматического управления летательным аппаратом, при котором определяют параметры положения и движения летательного аппарата, формируют траекторию полета, осуществляют управление полетом летательного аппарата для выдерживания указанной траектории полета, согласно изобретению вычисляют располагаемую нормальную перегрузку летательного аппарата, на основе которой вычисляют располагаемую нормальную перегрузку автоматического управления и с учетом которой формируют траекторию полета летательного аппарата.
Описанный способ мониторинга рельефа местности реализуется с помощью системы мониторинга рельефа местности, содержащей навигационную систему, соединенную со средствами для запоминания и обработки данных рельефа местности, согласно изобретению она снабжена вычислителем, при этом вычислитель выполнен с возможностью вычисления времени упреждения, а средства для запоминания и обработки данных рельефа местности выполнены с возможностью вычисления координат границы зоны мониторинга рельефа местности с учетом времени упреждения.
Описанный способ предотвращения столкновения летательного аппарата с рельефом местности реализуется с помощью системы предотвращения столкновения летательного аппарата с рельефом местности, которая содержит измеритель абсолютной барометрической высоты полета, навигационную систему, соединенные с управляющим вычислителем, средства для запоминания и обработки данных рельефа местности, соединенные с навигационной системой и управляющим вычислителем, автопилот, соединенный с измерителем абсолютной барометрической высоты полета, навигационной системой и управляющим вычислителем, согласно изобретению средства для запоминания и обработки данных рельефа местности выполнены с возможностью определения максимальной и минимальной высот рельефа местности в зоне мониторинга рельефа местности, а управляющий вычислитель выполнен с возможностью вычисления высоты включения автоматического увода от земли с учетом максимальной высоты рельефа местности в зоне мониторинга рельефа местности, вычисления показателя пересеченности рельефа местности в этой зоне и формирования траектории автоматического увода в зависимости от показателя пересеченности рельефа местности.
Описанный способ автоматического управления летательным аппаратом реализуется с помощью системы автоматического траекторного управления летательным аппаратом, содержащей навигационную систему, систему воздушных сигналов, систему ограничительных сигналов, соединенные с автопилотом, согласно изобретению она снабжена управляющей вычислительной системой, соединенной с навигационной системой, системой воздушных сигналов, системой ограничительных сигналов и автопилотом, при этом система ограничительных сигналов выполнена с возможностью вычисления располагаемой нормальной перегрузки летательного аппарата, а управляющая вычислительная система выполнена с возможностью вычисления располагаемой нормальной перегрузки автоматического управления и формирования траектории полета летательного аппарата с ее учетом.
Заявленное изобретение иллюстрируется приложенными графическими материалами на которых изображено:
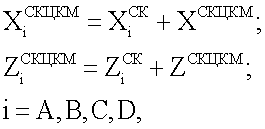
Фиг.1 - блок-схема системы предотвращения столкновения летательного аппарата с рельефом местности,
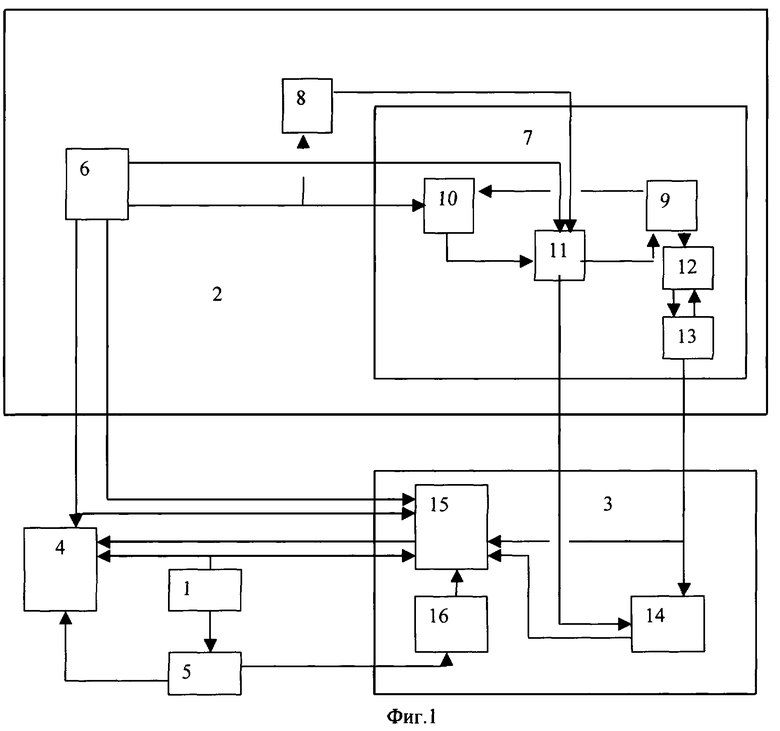
фиг.2 - блок-схема системы мониторинга рельефа местности,
фиг.3 - зона мониторинга рельефа,
фиг.4 - фрагмент математического моделирования.
Согласно предложенному способу мониторинга рельефа местности предварительно запоминают базу данных рельефа местности, определяют параметры положения и движения летательного аппарата, определяют погрешность счисления координат местоположения летательного аппарата, вычисляют время упреждения, с учетом которого вычисляют координаты границы зоны мониторинга рельефа местности, на основе которых и с использованием базы данных высот рельефа местности формируют в быстродействующем запоминающем устройстве временную базу данных высот рельефа местности, осуществляют мониторинг рельефа местности путем обработки данных временной базы данных высот рельефа местности.
Вычисляют постоянную времени контура управления высотой полета летательного аппарата, на основе которой вычисляют время упреждения.
Согласно предложенному способу предотвращения столкновения летательного аппарата с рельефом местности измеряют параметры положения и движения летательного аппарата, определяют максимальную высоту рельефа местности в зоне мониторинга рельефа местности, вычисляют потерю высоты при включении автоматического увода, на основе которых вычисляют высоту включения автоматического увода, осуществляют автоматический увод от земли при снижении летательного аппарата до высоты включения автоматического увода, а траекторию автоматического увода формируют в зависимости от пересеченности рельефа местности в этой зоне.
Определяют минимальную высоту рельефа местности в зоне мониторинга рельефа местности, вычисляют рассогласование между максимальной и минимальной высотами рельефа местности, вычисляют отношение указанного рассогласования к размеру зоны мониторинга рельефа местности в направлении полета, на основе которого вычисляют показатель пересеченности рельефа местности.
Согласно предложенному способу автоматического управления летательным аппаратом определяют параметры положения и движения летательного аппарата, вычисляют располагаемую нормальную перегрузку летательного аппарата, на основе которой вычисляют располагаемую нормальную перегрузку автоматического управления, с учетом которой формируют траекторию полета летательного аппарата, осуществляют управление полетом летательного аппарата для выдерживания указанной траектории полета.
Система предотвращения столкновения летательного аппарата с рельефом местности содержит (см. фиг.1) систему воздушных сигналов 1, устройство мониторинга рельефа местности 2, управляющий вычислитель 3, автопилот 4 и систему ограничительных сигналов 5.
Система мониторинга рельефа местности 2 содержит (см. фиг.1, 2) навигационную систему 6, средства для запоминания и обработки данных рельефа местности 7 и вычислитель времени упреждения 8.
Первый и второй входы средств для запоминания и обработки данных рельефа местности 7 соединены с соответствующими выходами навигационной системы 6. Выходы средств для запоминания и обработки данных рельефа местности 7 являются выходами устройства 2. Вход вычислителя времени упреждения 8 соединен со вторым выходом навигационной системы 6, а его выход - с третьим входом средств для запоминания и обработки данных рельефа местности 7.
Первый выход системы воздушных сигналов 1 соединен с первым входом управляющего вычислителя 3. Второй выход системы воздушных сигналов 1 соединен с системой ограничительных сигналов 5. Третий выход навигационной системы 6 соединен со вторым входом управляющего вычислителя 3, третий и четвертый входы которого соединены с первым и вторым выходами средств для запоминания и обработки данных рельефа местности 7 соответственно. Четвертый выход навигационной системы 6 соединен с пятым входом управляющего вычислителя 3 и первым входом автопилота 4, второй вход которого соединен с выходом управляющего вычислителя 3, третий вход - с первым выходом системы воздушных сигналов 1, а четвертый вход - с выходом системы ограничительных сигналов 5.
Средства для запоминания и обработки данных рельефа местности 7 содержат запоминающее устройство базы данных рельефа местности 9, преобразователь навигационной информации 10, вычислитель границ зоны мониторинга 11, быстродействующее запоминающее устройство временной базы данных рельефа местности 12, формирователь данных мониторинга рельефа 13.
Первый вход преобразователя навигационной информации 10 является первым входом средств для запоминания и обработки данных рельефа местности 7, он соединен с первым выходом навигационной системы 6. Второй вход преобразователя навигационной информации 10 соединен с первым выходом блока 9. Выход преобразователя навигационной информации 10 соединен с первым входом вычислителя границ зоны мониторинга 11. Второй вход вычислителя границ зоны мониторинга 11, являющийся соответствующим входом средств для запоминания и обработки данных рельефа местности 7, соединен со вторым выходом навигационной системы 6. Третий вход вычислителя границ зоны мониторинга 11, являющийся соответствующим входом средств для запоминания и обработки данных рельефа местности 7, соединен с выходом вычислителя времени упреждения 8. Первый выход вычислителя границ зоны мониторинга 11 соединен со входом запоминающего устройства базы данных рельефа местности 9, второй выход которого соединен со входом быстродействующего запоминающего устройства временной базы данных рельефа местности 12, выход которого соединен со входом формирователя данных мониторинга рельефа 13. Выход формирователя данных мониторинга рельефа 13 является первым выходом средств для запоминания и обработки данных рельефа местности 7 и устройства 2. Второй выход вычислителя границ зоны мониторинга 11 является вторым выходом средств для запоминания и обработки данных рельефа местности 7 и устройства 2.
Управляющий вычислитель 3 содержит формирователь показателя пересеченности рельефа местности 14, формирователь управляющих сигналов 15 и вычислитель располагаемой нормальной перегрузки автоматического управления 16.
Первый вход формирователя 15 является соответствующим входом управляющего вычислителя 3, он соединен с первым выходом системы воздушных сигналов 1. Второй вход формирователя 15 является соответствующим входом управляющего вычислителя 3, он соединен с третьим выходом навигационной системы 6. Третий вход формирователя 15 является соответствующим входом управляющего вычислителя 3, он соединен с выходом формирователя высот рельефа 13. Четвертый вход формирователя 15 является пятым входом управляющего вычислителя 3, он соединен с четвертым выходом навигационной системы 5. Пятый и шестой входы формирователя 15 соединены с выходами блоков 14, 16 соответственно. Выход формирователя 15 является выходом управляющего вычислителя 3, он соединен со вторым входом автопилота 4.
Первый и второй входы формирователя показателя пересеченности рельефа местности 14 соединены с первым и вторым выходами средств для запоминания и обработки данных рельефа местности 7, а его выход - с пятым входом формирователя 15.
Возможность осуществления изобретения иллюстрируется на примере системы предотвращения столкновения с землей маневренного самолета. Этот пример не должен рассматриваться ни как ограничивающий объем изобретения, ни как предпочтительная для всех случаев форма его реализации.
В навигационной системе 1 формируются:
- координаты местоположения ЛА в земной системе координат (ЗСК) - 1 выход;
земная скорость ЛА, путевой угол, СКО определения координат ЛА (V, Ψ, σ) - 2 выход;
- земная скорость, вертикальные скорость и ускорение ЛА (V, Vy, Ay) - 3 выход;
- углы крена и наклона траектории (γ, θ) - 4 выход.
В системе ограничительных сигналов 5 формируется располагаемая нормальная перегрузка ЛА с использованием информации о скоростном напоре с блока 1.
Nурасп=Cурасп·q·K5,
где Сурасп - располагаемый коэффициент подъемной силы;
q - скоростной напор;
К5 - константа для данного типа ЛА.
В преобразователе навигационной информации 10 осуществляется пересчет координат положения летательного аппарата с блока 6 из земной системы координат (ЗСК) в систему координат базы данных рельефа местности (цифровой карты местности - СКЦКМ) с учетом земных координат начала отсчета цифровой карты, которые поступают с первого выхода блока 6.
В вычислителе времени упреждения 8 вычисляется постоянная времени контура управления высотой полета ЛА -Тн, которая определяется динамическими характеристиками ЛА. В таблице 1 приведен пример зависимости Тн от скорости полета:
Указанная зависимость аппроксимируется в блоке 8 в функции земной скорости летательного аппарата.
На основе постоянной времени контура управления высотой полета ЛА -Тн вычисляется время упреждения Тu в виде:
где Т1=Ku·Тн; Ku, T0 - константы
Для маневренного ЛА Тu=10-15 с.
В вычислителе 11 вычисляются координаты границы зоны мониторинга в системе координат цифровой карты местности (СКЦКМ) по следующей информации:
- времени упреждения с вычислителя 8;
- земной скорости, путевом угле ЛА, погрешности счисления координат ЛА с блока 6;
- координатам местоположения ЛА в СКЦКМ с блока 10.
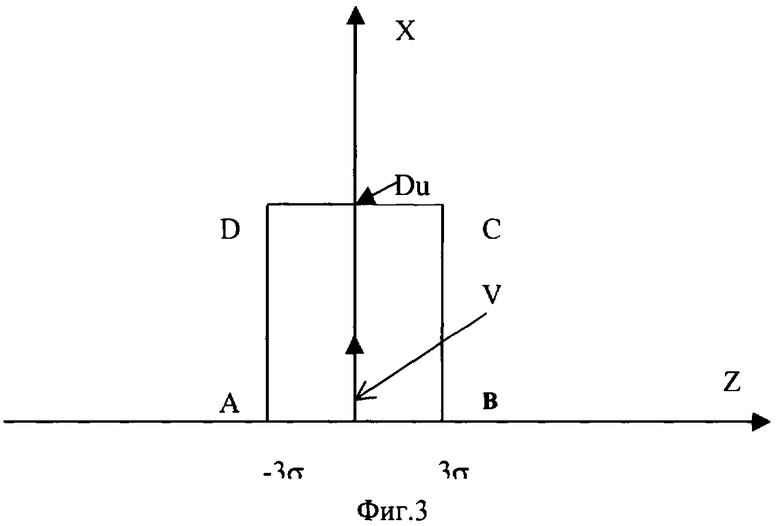
В качестве примера определим зону мониторинга в виде прямоугольника, ось симметрии которого совпадает с вектором скорости ЛА (фиг.3).
Размер прямоугольника по линии пути (дальность упреждения) равен
Du=Tu·V,
где V - земная скорость летательного аппарата, Тu - время упреждения.
Ширина прямоугольника Вu=6σ,
где σ - СКО определения координат ЛА.
Так, для времени упреждения Тu=15 с и скорости 200 м/с дальность упреждения равна 3 км.
Координаты угловых точек (А, Б, С, Д) в путевой СК равны:
Координата хП каждой из точек: 
Координата zП каждой из точек: 
Координаты угловых точек в переносной СКЦКМ (с началом в точке текущего местоположения ЛА):
Координата хСК каждой из точек: 
Координата zСК каждой из точек: 
где Ψ - путевой угол.
Координаты угловых точек в СКЦКМ имеют вид:
где ХСКЦКМ, ZСКЦКМ - координаты местоположения ЛА в СКЦКМ, определяемые в блоке 10.
Границы зоны в СКЦКМ будут определяться прямыми линиями, связывающими указанные точки.
Указанные координаты границы зоны мониторинга поступают с первого выхода блока 11 в блок 9, откуда в блок 12 поступают значения высот рельефа местности для точек карты (элементов базы данных рельефа местности), лежащих внутри зоны мониторинга. Упрежденная дальность со второго выхода блока 11 поступает на четвертый вход блока 3.
В формирователе высот рельефа 13 осуществляется выбор наибольшего (Ymax) и наименьшего (Ymin) значений из временной базы данных высот рельефа, которая поступает на вход блока 13.
В формирователе показателя пересеченности рельефа местности 14 вычисляется отношение разности максимальной и минимальной высот к величине дальности упреждения:
Uп.п.=(Ymax-Ymin)·57.3/Du (град);
Показатель пересеченности рельефа местности формируется следующим образом:

В блоке 16 формируется располагаемая нормальная перегрузка автоматического управления по информации о располагаемой нормальной перегрузке с блока 5.

где К 16 -константа для данного типа ЛА;
Nупр - константа для данного типа ЛА - предельное значение перегрузки автоматического управления.
В блоке 15 команда на включение автоматического увода формируется путем сравнения абсолютной барометрической высоты полета с измерителя 1 (Нб) с высотой включения автоматического увода (Hay):
Нб≤Нау,
где Нау=Ноп+Ymax+Нпв;
Ноп - заданный запас по высоте;
Нпв - потеря высоты при включении автоматического увода (вычисляется аналогично изобретению по патенту US 4924401 от 08.05.1990 г.);
Ymax - максимальная высота рельефа местности в зоне мониторинга.
В блоке 15 также формируются сигналы траекторного управления по информации с блоков 14,16:
Заданный крен, G зад=0;
Заданный угол наклона траектории (25 град для горного рельефа, 15 град - для пересеченного), при этом для предотвращения выхода за минимальное значение скорости указанные величины уменьшаются (например в 1.5 раза) при Ny распау<0.8Nупр.
Автопилот 4 при поступлении команды с блока 15 осуществляет
приведение ЛА к нулевому крену;
вывод ЛА на заданный угол наклона траектории;
стабилизацию скорости полета в заданном диапазоне скоростей, например 150-200 м/с).
Автопилот 4 при снятии команды с блока 15 осуществляет
приведение ЛА к горизонту с последующей стабилизацией барометрической высоты.
Эффективность использования системы предотвращения столкновения летательного аппарата с землей подтверждена результатами математического моделирования в эксплуатационном диапазоне скорости полета, углов крена и тангажа, с использованием цифровой карты рельефа местности района Кавказа.
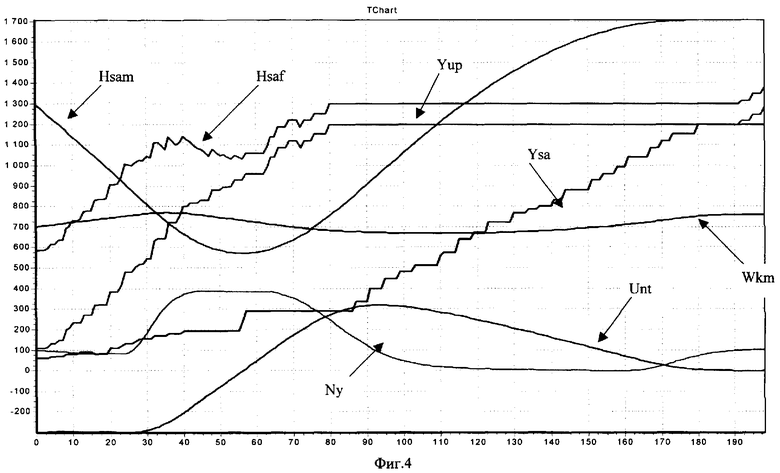
На фиг.4 представлен фрагмент математического моделирования - процесс пикирования ЛА с углом наклона траектории 30 град при полете над пересеченным рельефом местности, Ноп=100 м.
Обозначено:
- Wkm - земная скорость (км/ч).
- Hsaf - высота включения автоматического увода (м);
- Hsam - абсолютная высота полета (м);
- Unt - текущий угол наклона траектории (град);
- Ny - текущая нормальная перегрузка (ед);
- Yup -мажоранта рельефа местности (м);
- Ysa - текущая высота рельефа местности (м).
Итоговые характеристики представлены в табл.2.
Wkm=750 км/ч - земная скорость на момент начала увода ЛА;
Hsam=928 m - абсолютная высота на момент начала увода ЛА;
Unt=-30 град - угол наклона траектории на момент начала увода ЛА;
Ау=-2.1 м/с2 - вертикальное ускорение на момент начала увода ЛА;
Nyma=4.0 - максимальная нормальная перегрузка;
Vmm=669 км/ч - минимальное значение земной скорости;
Hmi=283 м - минимальная высота ЛА относительно рельефа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ АБСОЛЮТНОЙ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2346242C1 |
| Способ и система предупреждения столкновения пилотируемого летательного аппарата с земной поверхностью, многофункциональный, маневренный самолет с системой предупреждения столкновения с земной поверхностью | 2017 |
|
RU2664090C1 |
| Способ и система формирования оценки абсолютной высоты полета летательного аппарата, многофункциональный маневренный самолет с такой системой | 2017 |
|
RU2671613C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2523613C2 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ ОЦЕНКИ БЛИЗОСТИ ТРАЕКТОРИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ К ЗЕМНОЙ ПОВЕРХНОСТИ | 2008 |
|
RU2388059C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2475802C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
Группа изобретений относится к технике измерения, сигнализации и управления для широкого класса самолетов, вертолетов, беспилотных летательных аппаратов, в частности маневренных самолетов. В предложенном способе определяют параметры положения и движения летательного аппарата, вычисляют потерю высоты при включении автоматического увода, на ее основе вычисляют высоту включения автоматического увода и осуществляют автоматический увод от земли при снижении летательного аппарата до высоты включения автоматического увода. Максимальную высоту рельефа местности определяют в зоне мониторинга рельефа местности, относительно которой вычисляют высоту включения автоматического увода. Траекторию автоматического увода формируют в зависимости от пересеченности рельефа местности в этой зоне. Предложенная система содержит измеритель абсолютной барометрической высоты полета, навигационную систему, управляющий вычислитель, средства для запоминания и обработки данных рельефа местности, автопилот. Средства для запоминания и обработки данных рельефа местности выполнены с возможностью определения максимальной и минимальной высот рельефа местности в зоне мониторинга рельефа местности. Управляющий вычислитель выполнен с возможностью вычисления высоты включения автоматического увода от земли с учетом максимальной высоты рельефа местности в зоне мониторинга рельефа местности, вычисления показателя пересеченности рельефа местности в этой зоне и формирования траектории автоматического увода в зависимости от показателя пересеченности рельефа местности. Группа изобретений позволяет повысить безопасность полета вблизи земли. 2 н. и 1 з.п. ф-лы, 2 табл., 4 ил.
1. Способ предотвращения столкновения летательного аппарата с рельефом местности, при котором определяют параметры положения и движения летательного аппарата, вычисляют потерю высоты при включении автоматического увода, на основе которой вычисляют высоту включения автоматического увода, осуществляют автоматический увод от земли при снижении летательного аппарата до высоты включения автоматического увода, отличающийся тем, что определяют максимальную высоту рельефа местности в зоне мониторинга рельефа местности, относительно которой вычисляют высоту включения автоматического увода, а траекторию автоматического увода формируют в зависимости от пересеченности рельефа местности в этой зоне.
2. Способ по п.1, отличающийся тем, что определяют минимальную высоту рельефа местности в зоне мониторинга рельефа местности, вычисляют рассогласование между максимальной и минимальной высотами рельефа местности, вычисляют отношение указанного рассогласования к размеру зоны мониторинга рельефа местности в направлении полета, на основе которого вычисляют показатель пересеченности рельефа местности.
3. Система предотвращения столкновения летательного аппарата с рельефом местности, содержащая измеритель абсолютной барометрической высоты полета, навигационную систему, соединенные с управляющим вычислителем, средства для запоминания и обработки данных рельефа местности, соединенные с навигационной системой и управляющим вычислителем, автопилот, соединенный с измерителем абсолютной барометрической высоты полета, навигационной системой и управляющим вычислителем, отличающаяся тем, что средства для запоминания и обработки данных рельефа местности выполнены с возможностью определения максимальной и минимальной высот рельефа местности в зоне мониторинга рельефа местности, а управляющий вычислитель выполнен с возможностью вычисления высоты включения автоматического увода от земли с учетом максимальной высоты рельефа местности в зоне мониторинга рельефа местности, вычисления показателя пересеченности рельефа местности в этой зоне и формирования траектории автоматического увода в зависимости от показателя пересеченности рельефа местности.
| US 4924401 А, 08.05.1990 | |||
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2005 |
|
RU2271039C1 |
| RU 97106076 A, 10.04.1999. | |||

