Уровень техники
Настоящее изобретение относится к устройству отображения характеристик при повороте для отображения состояния управления характеристиками при повороте транспортного средства, имеющего блок управления характеристиками при повороте.
Различные способы были предложены до настоящего времени для повышения безопасности транспортного средства посредством попыток стабилизации транспортного средства в процессе поворота. Например, способ предусматривает регулирование с обратной связью разности между тяговым усилием левых колес и правых колес транспортного средства и силы торможения, прилагаемой к соответствующим колесам в соответствии с угловой скоростью рыскания транспортного средства, или другой способ предусматривает управление с обратной связью электронным управлением самоблокирующимся дифференциалом передачи с межосевым дифференциалом, которое изменяет степень дифференциального ограничения для передних колес и степень дифференциального ограничения для задних колес в соответствии с угловой скоростью рыскания транспортного средства (см., например, JP-A-2007-131229).
Согласно способу, описанному в JP-A-2007-131229, степень дифференциального ограничения для передних и задних колес и вращающий момент, и торможение, прилагаемые к правым и левым колесам транспортного средства генераторами вращающего момента для правых и левых колес, регулируются объединенным образом посредством применения управления угловой скоростью рыскания с обратной связью. Описанная технология, ограниченная только предотвращением избыточного поворачивания, предназначена для управления дифференциальным перемещением между передними и задними колесами при помощи межосевого дифференциала для усиления силы ограничения в сочетании с управлением вращающим моментом, воздействующим на левые и правые колеса транспортного средства.
Когда такой блок управления характеристиками при повороте предусмотрен на практике, водитель может устанавливать состояние управления характеристиками поворота благодаря отображению величины управления вращающим моментом, воздействующим на правые и левые колеса, и степень силы сдерживания (степени дифференциального ограничения). Таким образом, могут эффективно использоваться характеристики управляемости и характеристики безопасности транспортного средства.
Технология отображения, например, коэффициента распределения тягового усилия и величины вращающего момента, воздействующего на левые колеса, и величины вращающего момента, воздействующего на правые колеса, уже была предложена как способ отображения, например, величины управления вращающим моментом, воздействующим на левые и правые колеса, и коэффициента распределения (степени дифференциального ограничения) тягового усилия, прилагаемого к передним и задним колесам (см., например, JP-A-11-98603 и JP-UM-B-5-15046, приведенные ниже).
Предложенное до настоящего времени устройство отображения отображает интенсивность силы сдерживания на основе коэффициента распределения тягового усилия, отображаемого посредством степени состояния отображения (величины, обозначенной шкалой), и отображает величину вращающего момента на левых колесах и величину вращающего момента на правых колесах, показанные посредством степени состояния отображения (величины, обозначенной шкалой). Водитель визуально устанавливает силу сдерживания транспортного средства и состояние вращающего момента, воздействующего на правые и левые колеса, при помощи состояния дисплея, таким образом воспринимая состояние управления характеристиками при повороте (состояние поворотного усилия) транспортного средства согласно состоянию силы сдерживания транспортного средства и состоянию вращающего момента, воздействующего на правые и левые колеса.
Однако устройство отображения отображает интенсивность силы сдерживания на основе коэффициента распределения тягового усилия, величины вращающего момента, воздействующего на левые колеса, и величины вращающего момента, воздействующего на правые колеса соответственно. Когда соответствующие состояния отображаются одновременно, дисплей становится сложным, что ухудшает видимость для водителя. По этой причине состояние управления характеристиками при повороте (то есть состоянием поворотного усилия) оценивается посредством разности между величинами вращающих моментов, прилагаемых к правым колесам. Таким образом, возникает трудность мгновенного установления состояния управления характеристиками при повороте (состояния поворотного усилия) транспортного средства. В результате для водителя может быть трудно осуществлять управление с одновременным точным установлением состояния транспортного средства. При нынешнем положении вещей большая часть характеристик управляемости и безопасности транспортного средства не используется эффективно.
Сущность изобретения
Таким образом, целью изобретения является создание устройства отображения характеристик при повороте, которое позволяет мгновенно распознавать состояние управления характеристиками при повороте (состояние поворотного усилия) транспортного средства, таким образом позволяющего надежно и эффективно использовать характеристики управляемости и безопасности транспортного средства.
Для достижения этой цели согласно изобретению предложено устройство отображения характеристик при повороте, действующее для отображения состояния управления блоком управления характеристиками при повороте, который управляет характеристиками при повороте транспортного средства в направлении поворота посредством использования относительной разности между первым вращающим моментом, воздействующим на одно из левых и правых колес транспортного средства, и вторым вращающим моментом, воздействующим на другое из левых и правых колес транспортного средства, причем устройство отображения характеристик при повороте содержит:
первые секции отображения, предусмотренные для левых и правых колес и выполненные с возможностью увеличения или уменьшения в направлении поворота в соответствии с относительной разностью относительно контрольной секции, используемой, когда первый вращающий момент равен второму вращающему моменту.
С этой конфигурацией состояние отображения для левого колеса (колес) (первая часть) и состояние отображения для правого колеса (колес) (первая часть), которые распространяются от контрольной секции в направлении поворота, увеличивается или уменьшается согласно относительной разности между вращающим моментом, воздействующим при повороте внешнего колеса (колес) и вращающим моментом, воздействующим при повороте внутреннего колеса (колес). Следовательно, состояние управления характеристиками при повороте (состояние поворотного усилия) транспортного средства может быть визуально установлено интуитивным образом. Следовательно, состояние управления поворотным усилием может быть мгновенно установлено, и характеристики управляемости и характеристики безопасности транспортного средства могут эффективно использоваться без сбоев.
Блок управления характеристиками при повороте применяется для системы активного управления углом рыскания для управления разностью между вращающим моментом, воздействующим на левое колесо (колеса), и вращающим моментом, воздействующим на правое колесо (колеса), или системы для управления разностью между вращающим моментом торможения, воздействующим на левое колесо (колеса), и вращающим моментом торможения, воздействующим на правое колесо (колеса). Кроме того, блок управления характеристиками при повороте применяется для системы, которая управляет разностью между вращающим моментом, воздействующим на левое колесо (колеса), и вращающим моментом, воздействующим на правое колесо (колеса), и разностью между вращающим моментом управления торможением, воздействующим на левое колесо (колеса), и вращающим моментом управления торможением, воздействующим на правое колесо (колеса), таким образом в целом управляя моментом рыскания.
Первый вращающий момент может быть больше, чем второй вращающий момент. Первая секция отображения, соответствующая первому вращающему моменту, может увеличиваться на заданный уровень. Первая секция отображения, соответствующая второму вращающему моменту, может уменьшаться на заданный уровень.
В этом случае отображение идентичного уровня задано вверх и вниз относительно контрольной секции на стороне, где вращающий момент сделан большим, и на стороне, где вращающий момент сделан меньшим. Следовательно, величина и направление вращающего момента, воздействующего на левое колесо (колеса), и величина и направление вращающего момента, воздействующего на правое колесо (колеса), которые заданы управлением характеристиками при повороте (состоянием поворотного усилия) транспортного средства, могут быть визуально установлены с точностью.
Каждая из первых секций отображения может увеличиваться посредством увеличения количества сегментов одного за другим в первом направлении или уменьшаться посредством увеличения количества сегментов одного за другим во втором направлении, противоположном первому направлению.
В этом случае состояние управления характеристиками при повороте (состоянием поворотного усилия) транспортного средства может быть визуально установлено интуитивным образом при помощи количества множества отображенных сегментов.
Каждая из первых секций отображения может увеличиваться или уменьшаться в форме дуги окружности, имеющей контрольную секцию в ее середине.
В этом случае, так как состояние отображения увеличивается или уменьшается в форме дуги окружности, состояние управления состоянием поворотного усилия транспортного средства может быть визуально установлено более интуитивно.
Каждая из первых секций отображения может увеличиваться или уменьшаться замедленным образом, когда относительная разность становится больше.
В этом случае, даже когда величина управления поворотным усилием мала, состояние отображения может увеличиваться или уменьшаться бесперебойно. Кроме того, когда величина управления большая, возникновение нежелательного увеличения или уменьшения состояния отображения может предотвращаться таким образом, что соответствующее отображение может осуществляться безотносительно величины управления.
Устройство отображения характеристик при повороте может дополнительно содержать вторую секцию отображения для отображения степени дифференциального ограничения между передними колесами и задними колесами.
В этом случае в результате применения второй секции отображения состояние управления состоянием поворотного усилия, включая характеристику управляемости транспортного средства, может быть визуально установлено.
Вторая секция отображения может быть расположена между первыми секциями отображения, и вторая секция отображения может увеличиваться или уменьшаться в соответствии со степенью дифференциального ограничения, от секции, соответствующей контрольной секции первых секций отображения.
В этом случае состояние управления степенью дифференциального ограничения отображается в положении между состоянием управления состоянием поворотного усилия, прилагаемого к левому колесу (колесам), и состоянием управления состоянием поворотного усилия, прилагаемого к правому колесу (колесам). Следовательно, состояние управления состоянием поворотного усилия, включающим характеристику управляемости транспортного средства, может быть визуально установлено интуитивным образом.
Одна из первых секций отображения может увеличиваться, а другая из первых секций отображения может уменьшаться таким образом, что первые секции отображения будут симметричны друг другу.
Краткое описание чертежей
Фиг. 1 представляет собой концептуальное представление, показывающее состояние управления характеристиками при повороте транспортного средства, в котором применено устройство отображения характеристик при повороте в варианте, соответствующем настоящему изобретению.
Фиг. 2 представляет собой вид общей конфигурации транспортного средства, оборудованного устройством отображения характеристик при повороте.
Фиг. 3 представляет собой полный вид приборной панели, оборудованной устройством отображения характеристик при повороте в варианте, соответствующем настоящему изобретению.
Фиг. 4 представляет собой подробный вид состояния устройства отображения характеристик при повороте в варианте, соответствующем настоящему изобретению.
Фиг. 5 представляет собой зависимость между величинами управления моментом рыскания и величиной сегмента.
Фиг. 6 представляет собой зависимость между величинами управления активным межосевым дифференциалом и величиной сегмента.
фиг. 7 представляет собой вид переходного состояния сегмента.
Фиг. 8A-8F представляют собой виды других примеров устройства отображения характеристик при повороте, соответствующего настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Транспортное средство, в котором применяется устройство отображения характеристик при повороте, соответствующее настоящему изобретению, представляет собой транспортное средство с приводом на четыре колеса и имеет систему, включающую антиблокировочную систему тормозов (ABS), активный межосевой дифференциал (AСD) для управления силой дифференциального ограничения, прилагаемой к передним и задним колесам, активное управление углом рыскания (AYC) для управления тяговыми усилиями, прилагаемыми к правому и левому задним колесам, и активным управлением устойчивостью (ASC) для управления силами торможения, прилагаемыми к четырем колесам. Транспортное средство оборудовано регулятором характеристик при повороте, который демонстрирует и характеристику поворота, и характеристику ускорения, управляя системой в объединенном режиме. Транспортное средство, оборудованное устройством отображения характеристик при повороте, например, в ходе поворота или замедления, управляет тяговым усилием, сообщаемым правому и левому задним колесам, и усиливает силу дифференциального ограничения, прилагаемую к передним и задним колесам, таким образом повышая безопасность. Для улучшения характеристик поворота транспортного средства при совершении поворота тяговое усилие, прилагаемое к правому и левому задним колесам, управляется и дифференциальное ограничивающие усилие, прилагаемое к передним и задним колесам, ослабляется.
Устройство отображения характеристик при повороте, соответствующее настоящему изобретению, представляет собой устройство отображения, которое отображает условия управления характеристиками при повороте (состояние поворотного усилия) транспортного средства в регуляторе характеристик при повороте, а именно условий управления тяговыми усилиями, прилагаемыми к правому и левому задним колесам, и условий управления интенсивностью сил дифференциального ограничения, прилагаемых к передним и задним колесам. Устройство отображения устроено так, чтобы оно позволяло водителю визуально устанавливать состояние поворотного усилия интуитивным образом, таким образом мгновенно осознавая состояние управления характеристиками при повороте.
Вариант осуществления настоящего изобретения будет описан ниже со ссылками на чертежи.
На фиг. 1 показано концептуальное представление, показывающее состояние управления характеристиками при повороте транспортного средства, в котором применено устройство отображения характеристик при повороте, соответствующее варианту осуществления настоящего изобретения, и на фиг. 2 показана общая конфигурация транспортного средства, оборудованного устройством отображения характеристик при повороте. На фиг. 3 показана целиком приборная панель, оснащенная устройством отображения характеристик при повороте, соответствующим варианту осуществления настоящего изобретения. На фиг. 4 подробно показано состояние устройства отображения характеристик при повороте, соответствующего варианту осуществления настоящего изобретения. На фиг. 5 показана зависимость между величиной управления моментом рыскания и величиной сегмента. На фиг. 6 показана зависимость между величиной управления активным межосевым дифференциалом и величиной сегмента. На фиг. 7 отображаются переходные состояния сегмента. Кроме того, на фиг. 8A-8F отображаются другие примеры устройства отображения характеристик при повороте, соответствующие настоящему изобретению.
Устройство отображения характеристик при повороте транспортного средства, в котором применено устройство отображения характеристик при повороте, соответствующее варианту осуществления настоящего изобретения, будет описано со ссылками на фиг. 1 и 2.
Как показано на фиг. 1, в транспортном средстве 1 тяговое усилие двигателя 2 распределяется на передние колеса 4 и задние колеса 5 при помощи межосевого дифференциала (центрального дифференциала) 3, таким образом, с обеспечением управления интенсивностью сил дифференциального ограничения, прилагаемых к передним и задним колесам (величиной управления активным межосевым дифференциалом). Кроме того, разность моментов, относящаяся к управлению правым и левым тормозами, воздействующими на передние колеса 4, и разность моментов, относящаяся к смещающему моменту между правым и левым задними колесами 5, преобразуются в момент рыскания, и момент рыскания принят как управляемая величина момента рыскания транспортного средства 1 (величина управления моментом рыскания транспортного средства). Устройство отображения характеристик при повороте, соответствующее настоящему изобретению, должно отображать на индикаторе интенсивность силы дифференциального ограничения, прилагаемой к передним и задним колесам (величины управления активным межосевым дифференциалом), и величины управления моментом рыскания.
Краткое описание транспортного средства, оборудованного устройством отображения характеристик при повороте, будет описано со ссылками на фиг. 2.
Транспортное средство 1 оборудовано двигателем 2, и привод от двигателя 2 передается межосевому дифференциалу 3 посредством трансмиссии 6 и механизма 17 промежуточной зубчатой передачи. Выходная мощность, передаваемая межосевому дифференциалу 3, передается правому переднему колесу 4R при помощи полуоси 8R, а также левому переднему колесу 4L при помощи полуоси 8L.
Межосевой дифференциал 3 оснащен сателлитами 3a и 3b дифференциала, и предусмотрены боковые шестерни 3c и 3d, входящие в зацепление с сателлитами 3a и 3b дифференциала. Вращающий момент, поступающий посредством сателлитов 3a и 3b дифференциала, передается к передним колесам 4 посредством боковой шестерни 3c, и вращающий момент, поступающий при помощи сателлитов 3a и 3b дифференциала, передается к задним колесам 5 посредством боковой шестерни 3d и карданного вала 11. Межосевой дифференциал 3 допускает дифференциальное движение между передними колесами 4 и задними колесами 5.
Межосевой дифференциал 3 также снабжен механизмом 9 дифференциального ограничения для передних и задних колес, выполняющим функцию управления тяговыми характеристиками транспортного средства (функцию блока характеристик при повороте) посредством регулирования степени дифференциального ограничения, применяемого к передним колесам 4, и степени дифференциального ограничения, применяемого к задним колесам 5.
Механизм 9 дифференциального ограничения для передних и задних колес переменно распределяет выходной вращающий момент от двигателя 2 на передние колеса 4 и задние колеса 5, в то время как допускаемое дифференциальное движение между передними колесами 4 и задними колесами 5 переменно ограничивается. В частности, механизм 9 дифференциального ограничения для передних и задних колес включает механизм многодисковой гидравлической муфты сцепления, и степень дифференциального ограничения для передних колес 4, и степень дифференциального ограничения для задних колес 5 отрегулированы в соответствии с гидравлическим давлением не показанного гидравлического блока (управления активным межосевым дифференциалом).
Гидравлическое давление, воздействующее на механизм 9 дифференциального ограничения для передних и задних колес 9, регулируется в соответствии с командой от контроллера 21 межосевого дифференциала электронного блока 20 управления.
Выходная мощность, переданная заднему дифференциалу 7, передается правому заднему колесу 5R посредством полуоси 13R, а также левому заднему колесу 5L посредством полуоси 13L. Задний дифференциал 7 оборудован механизмом 14 изменения тягового усилия между правым и левым колесами, служащим узлом задания характеристик при повороте, который управляет характеристиками при повороте (моментом рыскания) транспортного средства 1 посредством создания разности вращающего момента между вращающим моментом привода, воздействующим на левое заднее колесо 5L, и вращающим моментом привода, воздействующим на правое заднее колесо 5R.
Механизм 14 смещения тягового усилия между правым и левым колесами включает передаточный механизм 14a и механизм 14b передачи вращающего момента переменного управления передаваемой мощностью. Передаточный механизм 14a предназначен для увеличения или уменьшения угловой скорости одного заднего колеса, то есть левого заднего колеса 5L, и выдачи угловой скорости механизму 14b передачи вращающего момента. Механизм 14b передачи вращающего момента включает механизм многодисковой гидравлической муфты сцепления, выполненный с возможностью регулирования вращающего момента трансмиссии. Механизм 14b передачи вращающего момента использует разность между угловой скоростью левого заднего колеса 5L, увеличиваемой или уменьшаемой передаточным механизмом 14a, и угловой скоростью одного заднего колеса, то есть правого заднего колеса 5R, таким образом изменяя вращающий момент (смещая вращающий момент) между левым задним колесом 5L и правым задним колесом 5R. В результате смещения вращающего момента между левым задним колесом 5L и правым задним колесом 5R вращающий момент привода, воздействующий на одно колесо, увеличивается или уменьшается таким образом, что вращающий момент привода, воздействующий на другое колесо, может уменьшаться или увеличиваться.
Гидравлическое давление, воздействующее на механизм 14 смещения тягового усилия между правым и левым колесами, регулируется в соответствии с командой от контроллера 22 заднего дифференциала электронного блока 20 управления.
Например, когда гидравлическое давление воздействует на механизм 14 изменения тягового усилия между правым и левым колесами при продолжении движения транспортного средства 1 с поворотом вправо для уменьшения вращающего момента, передаваемого правому заднему колесу 5R, вращение правого заднего колеса 5R замедляется. В этот момент вращающий момент, передаваемый левому заднему колесу 5L, увеличивается, при этом вращение левого заднего колеса 5L ускоряется. Таким образом, может генерироваться момент рыскания по часовой стрелке (правосторонний) (активное управление углом рыскания).
Правое и левое передние колеса 4 транспортного средства 1 снабжены тормозными устройствами 31R и 31L, и правое и левое задние колеса 5 снабжены тормозными устройствами 32R и 32L. Тормозные устройства 31R и 31L и тормозные устройства 32R и 32L независимо обеспечиваются гидравлическим давлением, и обеспечивается управление состоянием торможения соответствующего правого и левого передних колес 4 и состоянием торможения соответствующих правого и левого задних колес 5. Гидравлическое давление, воздействующее на тормозные устройства 31R, 31L, 32R и 32L, регулируется в соответствии с командой от контроллера 23 тормозных устройств электронного блока 20 управления.
Когда осуществляется управление состоянием торможения, например, разность между силами торможения, прилагаемыми к правому и левому передним колесам 4 (разность тормозных моментов), вызывает поворотное усилие транспортного средства 1. Разность тормозных моментов между правым и левым передними колесами 4 и разность тормозных моментов между правым и левым задним колесами 5 объединяются и таким образом могут составлять момент рыскания транспортного средства 1.
В указанном выше транспортном средстве 1 определяются, например, угол поворота, давление торможения, продольная угловая скорость рыскания транспортного средства 1 и боковая угловая скорость рыскания транспортного средства 1, достигаемые при движении, и осуществляется регулирование степени дифференциального ограничения для передних колес 4 и задних колес 5; осуществляется регулирование разности вращающих моментов между правым задним колесом 5R и левым задним колесом 5L; и осуществляется независимое управление силами торможения, прилагаемыми к правому и левому передним колесам 4 и правому и левому задним колесам 5. Например, осуществляется регулирование тягового усилия справа и слева, прилагаемого к задним колесам, во время поворота или замедления, и сила дифференциального ограничения для передних и задних колес увеличивается, что таким образом увеличивает устойчивость. Для увеличения способности к развороту транспортного средства в середине операции поворота осуществляется управление тяговым усилием, прилагаемым к правому и левому задним колесам, и сила дифференциального ограничения, прилагаемая к передним и задним колесам, уменьшается.
Таким образом, поведению транспортного средства 1 в пределах диапазона управления может оказываться содействие, и могут обеспечиваться высокие характеристики разворота и высокая устойчивость. Таким образом, например, операция поворота, выполняемая на дороге с малой кривизной, требует небольшой величины корректирующего руления, в результате чего устойчивость и управляемость улучшаются. Даже в случае экстренного маневрирования нарушение поведения, относящееся к операции грубого руления, небольшое и устойчивость и легкость конвергенции повышаются.
Устройство отображения характеристик при повороте, соответствующее настоящему изобретению, отображает интенсивность силы дифференциального ограничения, прилагаемой к передним и задним колесам (величины управления активным межосевым дифференциалом), и величину управления моментом рыскания (величину сегмента), в которую объединяются разность вращающих моментов, создаваемая управлением торможением правого и левого передних колес 4, и разность вращающих моментов, создаваемая смещением вращающего момента между правым и левым задними колесами 5. Устройство отображения позволяет водителю мгновенно установить состояние управления характеристиками при повороте (состояние поворотного усилия) транспортного средства 1, таким образом, с попыткой надежного и эффективного использования характеристик движения и безопасности транспортного средства 1.
Устройство отображения характеристик при повороте в варианте, соответствующем настоящему изобретению, будет описано со ссылками на фиг. 3-7.
Как показано на фиг. 3, устройство 30 отображения состояния транспортного средства размещено между спидометром 25 и тахометром 26 на приборной панели, расположенной перед сиденьем водителя, и устройство 27 отображения характеристик при повороте показано на устройстве 30 отображения состояния транспортного средства. Например, устройство отображения для заданной информации включается посредством касания панели водителем, и в качестве устройства 27 отображения характеристик при повороте действует одно из множества устройств отображения. В дополнение к устройству 27 отображения характеристик при повороте, включаемому в показанном примере, отображаются данные о наружной температуре, состоянии дорожной поверхности, режиме управления и остающемся количестве топлива.
Как показано на фиг. 4, устройство 27 отображения характеристик при повороте снабжено секцией 31 отображения момента рыскания, которая отображает величину управления моментом рыскания, и секцию 35 отображения дифференциального ограничения, которая отображает интенсивность силы дифференциального ограничения, прилагаемой к передним и задним колесам. Секция 31 отображения дифференциального ограничения имеет расположенные рядом левую секцию 31a отображения и правую секцию 31b отображения. Левая секция 31a отображения и правая секция 31b отображения выполнены в форме концентрично расположенных дуг окружности. Контрольные секции 32, где показано достижение баланса между вращающим моментом, воздействующим на правое колесо, и вращающим моментом, воздействующим на левое колесо, находятся в серединных положениях, соответствующих левой и правой секций 31a, 31b отображения.
Множество прямоугольных сегментов 33 (пять сегментов в показанном варианте осуществления изобретения) отображается в каждой из правой секции 31b отображения и левой секции 31a отображения. Когда сегменты 33 отображаются в положениях выше контрольной секции 32 левой секции 31a отображения, сегменты 33 в количестве, равном количеству сегментов отображения, отображаются ниже контрольной секции 32 правой секции 31b отображения. Количество сегментов 33 установлено согласно разности вращающих моментов между вращающим моментом, воздействующим на внешние колеса, и вращающим моментом, воздействующим на внутренние колеса, а именно величине управления моментом рыскания, и количество сегментов 33, отображаемых последовательно от контрольной секции 32 в направлении поворота, увеличивается или уменьшается, таким образом образуя форму дуги окружности. Количество сегментов 33 правой секции 31b отображения и количество сегментов 33 левой секции 31a отображения симметричны.
Например, в случае с условиями, показанными на фиг. 4, показано состояние, где максимальная величина управления моментом рыскания развивается в направлении поворота вправо. В частности, состояние, показанное на фиг. 4, соответствует состоянию, когда вращающий момент, воздействующий на левое заднее колесо 5, большой, и когда вращающий момент, воздействующий на правое заднее колесо 5, небольшой. В этом случае момент рыскания, в который преобразованы вращающий момент привода и вращающий момент управления тормозами, воздействует на поворачивающую вправо сторону, и разность вращающих моментов между вращающим моментом, воздействующим на левые колеса, и вращающим моментом, воздействующим на правые колеса, отображается в форме ряда сегментов 33, последовательно появляющихся выше контрольной секции 32 на левой секции 31a отображения (то есть с увеличением в направлении поворота). Сегменты в количестве, равном количеству этих сегментов, также отображаются последовательно ниже контрольной секции 32 на правой секции 31b отображения (то есть, с увеличением в направлении поворота).
Кроме того, секция 35 отображения дифференциального ограничения расположена между правой секцией 31b отображения и левой секцией 31a отображения секции 31 отображения момента рыскания. Степень дифференциального ограничения отображается в форме множества прямоугольных сегментов 36 в секции 35 отображения дифференциального ограничения. Сегменты 36 в количестве, равном друг другу, отображаются выше и ниже центрального сегмента 36a. Положение по вертикали центрального сегмента 36a аналогично положениям контрольных секции 32 секций 31 отображения дифференциального ограничения. Когда интенсивность силы дифференциального ограничения, прилагаемой к передним и задним колесам (то есть величина управления активным межосевым дифференциалом), становится больше, количество отображаемых сегментов 36 увеличивается в вертикальном направлении. Пример, показанный на фиг. 4, соответствует случаю, когда максимальная интенсивность (максимальная величина управления активным межосевым дифференциалом) достигнута и когда получены высокие характеристики управляемости транспортного средства 1 (см. фиг. 1).
Зависимость между величиной управления моментом рыскания и количеством отображенных сегментов 33 (вычисленным количеством сегментов) описана со ссылками на фиг. 5. Зависимость между величиной управления активным межосевым дифференциалом и количеством отображенных сегментов 36 (вычисленным количеством сегментов) описана со ссылками на фиг. 6.
Как показано на фиг. 5, количество сегментов задано от одного до пяти при относительном росте величины управления моментом рыскания. Положительная величина управления моментом рыскания показывает левый поворот, и отрицательная величина управления моментом рыскания показывает правый поворот. Кроме того, когда количество сегментов положительно, сегменты отображаются по направлению вниз в левой секции 31a отображения и сегменты отображаются по направлению вверх в правой секции 31b отображения. Когда количество сегментов отрицательное, сегменты отображаются по направлению вниз в левой секции 31a отображения и сегменты отображаются по направлению вверх в правой секции 31b отображения.
Когда величина управления моментом рыскания увеличивается, коэффициент увеличения или уменьшения изменения состояния отображения задают так, что оно становится медленнее. В частности, когда количество сегментов соответствует одному, устанавливается величина "h" управления моментом рыскания. Когда количество сегментов достигает четырех, устанавливается большая величина (длительный период) управления Н моментом рыскания. Установки задают таким образом, что при большей (меньшей) величине управления моментом рыскания переключение сегмента 33 становится медленнее (быстрее).
В результате, даже когда величина управления моментом рыскания мала, отображение сегмента 33 может быть увеличено или уменьшено без сбоя. Кроме того, когда величина управления моментом рыскания велика, нежелательное увеличение или уменьшение количества отображаемых сегментов 33 может предотвращаться. Точное отображение может обеспечиваться независимо от величины управления рысканием.
Как показано на фиг. 6, количества сегментов заданы от одного до пяти в части сегмента отображения, где величина управления активным межосевым дифференциалом становится больше, посредством чего количество отображаемых сегментов 36 увеличивается. В частности, повышение характеристик управляемости транспортного средства 1 (см. фиг. 1) отображается при помощи отображения сегментов 36. Установки задают таким образом, что чем больше величина управления активным межосевым дифференциалом, тем медленнее темп увеличения или уменьшения изменения состояния отображения. В частности, когда количество сегментов составляет один, устанавливается величина "h" управления активным межосевым дифференциалом. Когда количество сегментов составляет четыре, устанавливается большая величина (более продолжительный период) Н управления моментом рыскания. Установки задают таким образом, что чем больше (меньше) величина управления активным межосевым дифференциалом, тем медленнее (быстрее) переключение отображения сегментов 36.
В результате, даже когда величина управления активным межосевым дифференциалом мала, отображение сегментов 36 может увеличиваться или уменьшаться без сбоев. Когда величина управления активным межосевым дифференциалом большая, возникновение нежелательного увеличения или уменьшения отображения сегментов 36 может предотвращаться. Таким образом, может обеспечиваться соответствующее отображение, не принимая во внимание величины управления активным межосевым дифференциалом.
Состояние перемещения сегмента будет описано со ссылками на фиг. 7. Ссылочные позиции, приведенные в нижеследующем описании, аналогичны приведенным на фиг. 4. Следовательно, описание дано со ссылками на фиг. 4.
Относительно состояния сегмента 36, соответствующего величине управления активным межосевым дифференциалом, когда количество сегментов соответствует одному, отображается центральный сегмент 36a. Когда количество сегментов соответствует двум, дополнительно отображаются один сегмент выше и другой ниже центрального сегмента 36a в сочетании с центральным сегментом 36a, посредством чего отображаются в сумме три сегмента 36. Аналогично, когда количество сегментов соответствует трем, отображаются в сумме пять сегментов 36. Когда количество сегментов соответствует четырем, отображаются в сумме семь сегментов 36. Когда количество сегментов соответствует пяти, отображается в сумме девять сегментов 36.
Случай, когда величина управления активным межосевым дифференциалом становится больше, соответствует состоянию, когда характеристики управляемости транспортного средства (см. фиг. 1) увеличены. Следовательно, количество сегментов 36 может быть установлено как увеличивающееся от центрального сегмента 36a в вертикальном направлении секции 36 отображения дифференциального ограничения.
Относительно состояния сегментов 33, соответствующих величине управления моментом рыскания, выполняемого в ходе поворота вправо, когда количество сегментов соответствует одному, один сегмент 33 отображается выше контрольной секции 32 в левой секции 31a отображения. Кроме того, один сегмент 33 отображается ниже контрольной секции 32 в правой секции 31b отображения. Когда количество сегментов соответствует двум, два сегмента 33 отображаются выше контрольной секции 32 в левой секции 31a отображения и два сегмента 33 отображаются ниже контрольной секции 32 в правой секции 31b отображения. Таким образом, водитель может интуитивно устанавливать, что текущее действие соответствует содействию повороту вправо.
Аналогично, каждый раз, когда количество сегментов увеличивается на один, один сегмент 33 добавляется выше контрольной секции 32 в левой секции 31 отображения и один сегмент 33 добавляется ниже контрольной секции 32 в правой секции 31b отображения. Когда количество сегментов соответствует пяти, пять сегментов 33 отображаются выше контрольной секции 32 в левой секции 31a отображения. Пять сегментов 33 отображаются ниже контрольной секции 32 в правой секции 31b отображения. Таким образом, водитель может интуитивно устанавливать, что содействие повороту влево большое.
Относительно состояния сегментов 33, соответствующих величине управления моментом рыскания, выполняемого в ходе поворота влево, когда количество сегментов соответствует одному, один сегмент 33 отображается ниже контрольной секции 32 в левой секции 31a отображения. Кроме того, один сегмент 33 отображается выше контрольной секции 32 в правой секции 31b отображения. Когда количество сегментов соответствует двум, два сегмента 33 отображаются ниже контрольной секции 32 в левой секции 31a отображения и два сегмента 33 отображаются выше контрольной секции 32 в правой секции 31b отображения. Таким образом, водитель может интуитивно устанавливать, что текущее действие соответствует содействию повороту влево.
Аналогично, каждый раз, когда количество сегментов увеличивается на единицу, один сегмент 33 добавляется ниже контрольной секции 32 в левой секции 31 отображения и один сегмент 33 добавляется выше контрольной секции 32 в правой секции 31b отображения. Когда количество сегментов соответствует пяти, пять сегментов 33 отображаются ниже контрольной секции 32 в левой секции 31a отображения. Пять сегментов 33 отображаются выше контрольной секции 32 в правой секции 31b отображения. Таким образом, водитель может интуитивно устанавливать, что содействие повороту влево большое.
В устройстве 27 отображения характеристик при повороте количество сегментов 33, отображаемых в направлении поворота от контрольной секции 32 секции 31 отображения момента рыскания, увеличивается или уменьшается в форме дуги окружности в соответствии с относительной разностью между вращающим моментом, действующим при повороте внешних колес, и вращающим моментом, действующим при повороте внутренних колес. Соответственно, водитель может визуально, интуитивно устанавливать величину управления моментом рыскания транспортного средства 1 (см. фиг. 1), а именно состояние управления характеристиками при повороте (состояние поворотного усилия). Следовательно, возможно мгновенное установление состояния управления поворотным усилием. Характеристики управляемости и характеристики безопасности транспортного средства 1 (см. фиг. 1) могут эффективно использоваться без сбоев. Кроме того, уровень отображения левой секции 31a отображения и уровень отображения правой секции 31b отображения заданы так, что они становятся равными друг другу. Следовательно, величина и направление управления моментом рыскания могут быть визуально установлены с точностью.
Так как секция 35 отображения дифференциального ограничения расположена между левой секцией 31a отображения и правой секцией 31b отображения секции 31 отображения момента рыскания, состояние управления степенью дифференциального ограничения отображается между состоянием управления поворотным усилием левых колес и состоянием управления поворотным усилием правых колес и степень управления отображается относительно центральных секций 32. Таким образом, состояние управления состоянием поворотного усилия, включая характеристики управляемости транспортного средства 1, может быть визуально установлено более интуитивно.
Вышеупомянутый вариант осуществления изобретения был описан для примера относительно случая, когда секция 35 отображения дифференциального ограничения расположена между левой секцией 31a отображения и правой секцией 31b отображения секции 31 отображения момента рыскания. Однако существенным требованием является включение, по меньшей мере, секции 31 отображения момента рыскания. Более конкретно, в данном варианте осуществления изобретения было показано состояние управления активным межосевым дифференциалом транспортного средства с полным приводом для управления силой дифференциального ограничения, прилагаемой к передним и задним колесам. Однако в случае с транспортным средством с приводом на два колеса транспортное средство может иметь только секцию 31 отображения момента рыскания.
Описание приведено в отношении примера, где величина управления моментом рыскания отображается системой, которая управляет разностью вращающих моментов между вращающим моментом, воздействующим на левое заднее колесо, и вращающим моментом, воздействующим на правое заднее колесо, и разностью между вращающим моментом управления тормозами, воздействующим на левое переднее колесо, и вращающим моментом управления тормозами, воздействующим на правое переднее колесо, таким образом целиком управляя моментом рыскания. Однако величина момента рыскания, приобретенного посредством активного управления рысканием, для управления разностью вращающих моментов между вращающим моментом, воздействующим на левое заднее колесо, и вращающим моментом, воздействующим на правое заднее колесо, также может отображаться. Кроме того, величина момента рыскания, приобретенного при помощи системы для управления разностью между вращающим моментом управления торможением, воздействующим на левое переднее колесо, и вращающим моментом управления торможением, воздействующим на правое переднее колесо, также может отображаться.
Другие примеры устройства отображения характеристик при повороте, соответствующего настоящему изобретению, будут описаны со ссылками на фиг. 8A-8F.
Устройство 27A отображения характеристик при повороте, показанное на фиг. 8A, сконфигурировано так, чтобы оно отображало сегменты секции 35А отображения дифференциального ограничения таким образом, что сегменты прирастают или убывают в концентричной форме. Таким образом, становится легко визуально установить увеличение или уменьшение величины управления активным межосевым дифференциалом.
Устройство 27В отображения характеристик при повороте, показанное на фиг. 8B, сконфигурировано таким образом, что сегменты секции 31В отображения момента рыскания отображаются длиннее при возрастании величины управления моментом рыскания. Таким образом, становится легко визуально установить величину содействия управлению поворотом.
Устройство 27С отображения характеристик при повороте, показанное на фиг. 8C, устроено таким образом, что контрольная секция 32C отображается как единое целое. Таким образом, становится легко визуально установить в объединенной форме состояние содействия управлению поворотом и состояние управления активным межосевым дифференциалом.
Устройство 27D отображения характеристик при повороте, показанное на фиг. 8D, сконфигурировано таким образом, что контрольная секция 32D отображается как единое целое и так, что секция 31D отображения момента рыскания и секция 35D отображения дифференциального ограничения отображаются в одинаковой форме. Таким образом, простой дисплей позволяет легко устанавливать состояние управления.
Устройство 27Е отображения характеристик при повороте, показанное на фиг. 8E, сконфигурировано таким образом, что отображение секции 31Е отображения момента рыскания прирастает или уменьшается в веерообразной форме. Таким образом, становится легко непрерывно устанавливать величину содействия управлению поворотом.
Устройство 27F отображения характеристик при повороте, показанное на фиг. 8F, сконфигурировано так, что получен дисплей, не имеющий внутренних рамок в секции 31F отображения момента рыскания. Таким образом, становится легче установить в объединенной форме состояние содействия управлению поворотом и состояние управления активным межосевым дифференциалом.
Как показано на фиг. 8A-8F, состояние осуществляемых действий управления, таких как управление активным межосевым дифференциалом, управление полным приводом, сверхуправление полным приводом и т.п., также могут отображаться одновременно.
Устройство отображения характеристик при повороте, соответствующее настоящему изобретению, позволяет мгновенно распознавать состояния управления характеристиками при повороте (состояния поворотного усилия) транспортного средства, таким образом позволяя надежно и эффективно использовать характеристики управляемости и безопасности транспортного средства.
Настоящее изобретение может использоваться в области устройств отображения характеристик при повороте, которые отображают состояние управления поведением при повороте транспортного средства, имеющего блок управления характеристиками при повороте.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2384438C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАСПРЕДЕЛЕНИЕМ ДВИЖУЩЕЙ СИЛЫ | 2008 |
|
RU2376174C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2388631C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| СИСТЕМЫ ДЛЯ СТАБИЛИЗАЦИИ И СПОСОБ ДЛЯ СТАБИЛИЗАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2709319C2 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| Двухрежимный дифференциальный механизм распределения мощности | 2024 |
|
RU2837931C1 |
| ПОВЫШАЮЩАЯ УСТОЙЧИВОСТЬ СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПРОБУКСОВКИ И РЫСКАНИЯ С ДИФФЕРЕНЦИАЛОМ ПОВЫШЕННОГО ТРЕНИЯ | 2007 |
|
RU2449909C2 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
Изобретение относится к транспортной технике. Предложено устройство отображения характеристик при повороте, работающее для отображения состояния управления блоком управления характеристиками поворота. Последний управляет характеристиками поворота транспортного средства в направлении поворота с использованием относительной разности между первым вращающим моментом, воздействующим на одно из левого и правого колес транспортного средства, и вторым вращающим моментом, воздействующим на другое из левого и правого колес транспортного средства. Устройство отображения характеристик при повороте содержит секции отображения, предусмотренные для левого и правого колес. Эти секции отображения выполнены с возможностью увеличения или уменьшения в направлении поворота в соответствии с указанной относительной разностью относительно контрольной секции, используемой, когда первый вращающий момент равен второму вращающему моменту. Изобретение обеспечивает мгновенное распознавание состояния управления характеристиками при повороте (состояние поворотного усилия) транспортного средства, а также надежное и эффективное использование характеристик, управляемости и безопасности транспортного средства. 7 з.п. ф-лы, 8 ил.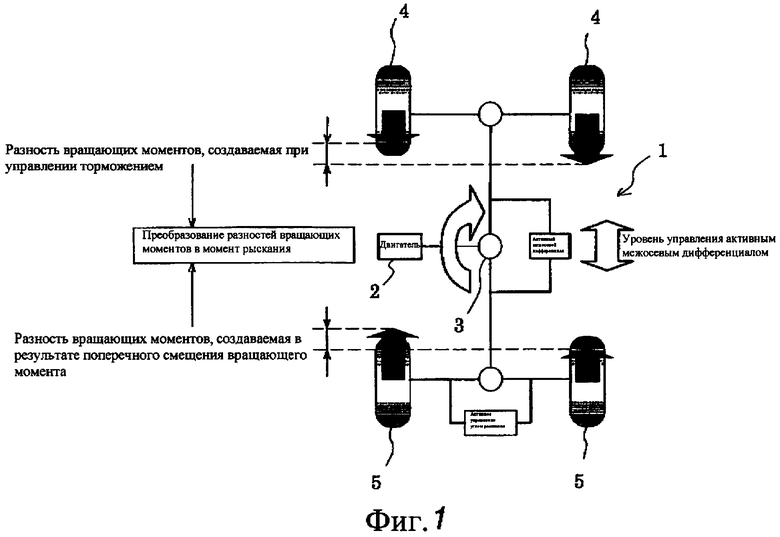
1. Устройство отображения характеристик при повороте, работающее для отображения состояния управления блоком управления характеристиками поворота, который управляет характеристиками поворота транспортного средства в направлении поворота с использованием относительной разности между первым вращающим моментом, воздействующим на одно из левого и правого колес транспортного средства, и вторым вращающим моментом, воздействующим на другое из левого и правого колес транспортного средства, причем устройство отображения характеристик при повороте содержит первые секции отображения, предусмотренные для левого и правого колес и выполненные с возможностью увеличения или уменьшения в направлении поворота в соответствии с относительной разностью относительно контрольной секции, используемой, когда первый вращающий момент равен второму вращающему моменту.
2. Устройство по п.1, в котором, когда первый вращающий момент больше, чем второй вращающий момент,
первая секция отображения, соответствующая первому вращающему моменту, увеличивается на заданный уровень, и
первая секция отображения, соответствующая второму вращающему моменту, уменьшается на заданный уровень.
3. Устройство по п.1, в котором каждая из первых секций отображения увеличивается посредством увеличения количества сегментов одного за другим в первом направлении или уменьшается посредством увеличения количества сегментов одного за другим во втором направлении, противоположном первому направлению.
4. Устройство по п.1, в котором каждая из первых секций отображения увеличивается или уменьшается в форме дуги окружности, имеющей контрольную секцию в ее центре.
5. Устройство по п.1, в котором каждая из первых секций отображения увеличивается или уменьшается медленнее, когда относительная разность становится больше.
6. Устройство по п.1, дополнительно содержащее вторую секцию отображения для отображения степени дифференциального ограничения между передними колесами и задними колесами.
7. Устройство по п.6, в котором
вторая секция отображения расположена между первыми секциями отображения, и
вторая секция отображения увеличивается или уменьшается в соответствии со степенью дифференциального ограничения от секции, соответствующей контрольной секции первых секций отображения.
8. Устройство по п.1, в котором одна из первых секций отображения увеличивается, а другая из первых секций отображения уменьшается таким образом, что первые секции отображения симметричны друг другу.
| JP 2006335305 А, 14.12.2006 | |||
| JP 1197174 А, 08.08.1989 | |||
| WO 2005047049 A1, 26.05.2005 | |||
| ЛЮФТМЕТР СО СВЕТОВЫМ УСТРОЙСТВОМ ДЛЯ ФИКСАЦИИ НАЧАЛА ПОВОРОТА УПРАВЛЯЕМЫХ КОЛЕС | 2002 |
|
RU2230304C2 |

