Настоящее изобретение относится к способу и устройству для обнаружения опасности столкновения летательного аппарата, в частности транспортного летательного аппарата, с окружающей местностью.
Известно, что цель такого устройства, например типа TAWS («Системы предупреждения и предотвращения столкновений с наземными препятствиями») или типа GPWS («Системы предупреждения опасного сближения с землей»), состоит в том, чтобы обнаруживать всякую опасность столкновения летательного аппарата с окружающей местностью и оповещать экипаж, когда обнаружена опасность, из условия чтобы последний, в таком случае, мог выполнить маневр предотвращения столкновения с наземными препятствиями. Обычно такое устройство содержит:
первое средство, осведомленное о профиле местности, расположенной впереди летательного аппарата;
второе средство для определения эффективных значений конкретных параметров полета;
третье средство для расчета, по упомянутым эффективным значениям, траектории предотвращения столкновения, которая является наилучшим возможным представлением реальной ситуации, и для проверки, совместима ли эта траектория предотвращения столкновения с упомянутым профилем местности, по меньшей мере на протяжении заранее определенного расстояния впереди летательного аппарата; и
четвертое средство для передачи соответствующего сигнала предупреждения, если упомянутое третье средство обнаруживает несовместимость.
Вообще, упомянутое третье средство использует модель, предназначенную для представления маневра предотвращения столкновения, выполняемого летательным аппаратом, для расчета соответствующей траектории. Однако используемая модель, которая обычно учитывает постоянный коэффициент нагрузки и фиксированную траекторию, представляющую устойчивое состояние летательного аппарата, довольно хорошо воспроизводит маневр, выполняемый летательным аппаратом. Более того, производимая аппроксимация вызывает необходимость учитывать большие допустимые погрешности, для того чтобы не завышать реальные летно-технические характеристики летательного аппарата во время маневра предотвращения столкновения. Однако учет допустимых ошибок может иметь следствием, в частности, сигналы ложной тревоги. Режим расчета и режим проверки, используемые упомянутым третьим средством, поэтому, не являются вполне достоверными.
Настоящее изобретение относится к способу для обнаружения опасности столкновения летательного аппарата с окружающей местностью, который дает возможность преодолевать эти недостатки.
Для этой цели, согласно изобретению, упомянутый способ, согласно которому автоматически и периодически выполняется следующий цикл последовательных этапов:
a) учитывается профиль местности, расположенной впереди летательного аппарата;
b) определяются эффективные значения конкретных параметров полета;
c) по этим эффективным значениям, определяют траекторию предотвращения столкновения, содержащую, по меньшей, мере участок подъема и участок постоянного наклона, ее проецируют впереди летательного аппарата;
d) проверяется, совместима ли упомянутая траектория предотвращения столкновения с упомянутым профилем местности, по меньшей мере на протяжении заранее определенного расстояния впереди летательного аппарата; и
e) если на этапе d) обнаружена несовместимость, передается соответствующий предупредительный сигнал, характеризуется тем, что:
на этапе c):
рассчитывается, с использованием определенных эффективных значений некоторых из упомянутых конкретных параметров полета, изменение высоты летательного аппарата, которое обусловлено переходом энергии и изменением общего наклона, произведенным снижением скорости во время маневра предотвращения столкновения; и
изменение высоты, рассчитанное таким образом, используется для определения траектории предотвращения столкновения, которая является наилучшим возможным представлением реальности, и которая содержит, между участком подъема и участком с постоянным наклоном, промежуточный участок, который учитывает это изменение высоты; и
на этапе d), траектория предотвращения столкновения, определенная таким образом, используется для проверки, совместима ли такая траектория предотвращения столкновения с упомянутым профилем местности на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата.
Таким образом, изобретение позволяет учитывать изменение высоты летательного аппарата, которое обусловлено переходом энергии и изменением тяги в ходе маневра предотвращения столкновения, которое дает возможность оптимизировать модель, используемую на этапе c) и описанную ниже. Вычисления, используемые во время этого этапа c), поэтому, приспособлены, чтобы быть как можно ближе к реальности. Следовательно, обнаружение опасности столкновения с местностью учитывает маневр предотвращения столкновения, который очень близок к маневру предотвращения столкновения, фактически используемому, если необходимо, летательным аппаратом, каковое, в частности, дает возможность избегать сигналов ложной тревоги и получать очень достоверное отслеживание.
В первом варианте осуществления, упомянутое изменение общего наклона, произведенное снижением скорости, соответствует изменению силы тяги.
Преимущественно, в этом первом варианте осуществления:
на этапе b):
оценивается эффективная масса GW летательного аппарата;
измеряется текущая эффективная скорость VO летательного аппарата; и
измеряется текущий эффективный наклон γO летательного
аппарата; и
на этапе c), рассчитывается упомянутое изменение (ΔH) высоты с использованием следующих уравнений:
ΔH=[K1·(VO2-VF2)/2·g+(K2·(VO-VF)+K3)/(GW-GWO)]·f(x)
f(x)=f(X-XO; VF; GW; γF-γO)
f(x) ∈[0;1],
в которых:
K1, K2 и K3 являются заранее определенными параметрами, зависящими от летательного аппарата;
g представляет ускорение свободного падения;
GWO представляет заранее определенное постоянное значение массы летательного аппарата, зависящее от упомянутого летательного аппарата;
VF представляет постоянное значение скорости, соответствующее стабильной скорости, достигаемой в конце маневра предотвращения столкновения, это значение является заранее определенным и зависящим от летательного аппарата;
γF представляет постоянное значение наклона полета, соответствующее наклону полета относительно земли, стабилизируемому в конце маневра предотвращения столкновения, это значение является заранее определенным и зависящим от летательного аппарата и от параметров состояния;
X представляет текущее положение летательного аппарата на горизонтальной оси вертикальной плоскости симметрии летательного аппарата; и
XO представляет положение летательного аппарата на упомянутой горизонтальной оси упомянутой вертикальной плоскости в начале фазы изменения высоты упомянутого маневра предотвращения столкновения.
Кроме того, во втором варианте осуществления, на этапе c), упомянутое изменение высоты рассчитывается этап за этапом, давая сумму:
первого изменения высоты, которое представляет превращение кинетической энергии в потенциальную энергию, спровоцированное замедлением; и
второго изменения высоты, которое представляет общий наклон по данному этапу.
Кроме того, предпочтительно, для того, чтобы оптимизировать фазу начального подъема маневра предотвращения столкновения:
на этапе c):
с использованием заранее определенных эффективных значений некоторых из упомянутых конкретных параметров полета, рассчитывается коэффициент нагрузки, который является представляющим фазу подъема маневра предотвращения столкновения; и
коэффициент нагрузки, рассчитанный таким образом, используется для определения участка подъема траектории предотвращения столкновения, которая является наилучшим возможным представлением реальности; и
на этапе d), участок подъема, определенный таким образом, используется для проверки, совместима ли траектория предотвращения столкновения с упомянутым профилем местности на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата.
В этом случае, предпочтительно,
на этапе b):
оценивается эффективная масса GW летательного аппарата; и
измеряется текущая эффективная скорость VO летательного аппарата; и
на этапе c), упомянутый коэффициент Nz нагрузки рассчитывается с использованием следующего выражения:
Nz=n0+(n1·GW)+(n2·VO),
в котором n0, n1 и n2 являются заранее определенными параметрами.
В конкретном варианте осуществления, по меньшей мере, некоторые из упомянутых заранее определенных параметров и то, необходимы ли упомянутые постоянные значения, зависят от действующего режима полета летательного аппарата. Это дает возможность улучшать представительность моделируемого маневра предотвращения столкновения по сравнению с маневром, который вероятно должен реально выполняться летательным аппаратом.
Настоящее изобретение также относится к устройству для автоматического обнаружения опасности столкновения летательного аппарата с окружающей местностью, упомянутое устройство содержит:
первое средство, осведомленное о профиле местности, расположенной впереди летательного аппарата;
второе средство для определения эффективных значений конкретных параметров полета;
третье средство для расчета, по упомянутым эффективным значениям, траектории предотвращения столкновения и для проверки, совместима ли упомянутая траектория предотвращения столкновения с упомянутым профилем местности, по меньшей мере, на протяжении заранее определенного расстояния впереди летательного аппарата; и
четвертое средство для передачи соответствующего сигнала предупреждения, если упомянутое третье средство обнаруживает несовместимость.
Согласно изобретению упомянутое устройство характеризуется тем, что упомянутое третье средство содержит, по меньшей мере:
первый узел для расчета, с использованием определенных эффективных значений некоторых из упомянутых конкретных параметров полета, изменения высоты летательного аппарата, которое обусловлено переходом энергии и изменением тяги, произведенным снижением скорости во время маневра предотвращения столкновения;
второй узел для использования изменения высоты, рассчитанного упомянутым первым узлом, для того чтобы определять траекторию предотвращения столкновения, которая является наилучшим возможным представлением реальности; и
третий узел для использования траектории предотвращения столкновения, определенной упомянутым вторым узлом, для того чтобы проверять, совместима ли эта траектория предотвращения столкновения с упомянутым профилем местности на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата.
В конкретном варианте осуществления, упомянутое третье средство дополнительно содержит:
четвертый узел для расчета, с использованием определенных эффективных значений некоторых из упомянутых конкретных параметров полета, коэффициента нагрузки, который является представляющим фазу подъема маневра предотвращения столкновения;
пятый узел (например, соответствующий упомянутому второму узлу) для использования коэффициента нагрузки, рассчитанного упомянутым четвертым узлом, для того чтобы определять участок подъема траектории предотвращения столкновения, которая является наилучшим возможным представлением реальности; и - шестой узел (например, соответствующий упомянутому третьему узлу) для использования этого участка подъема, определенного упомянутым пятым узлом, для того чтобы проверять, совместима ли упомянутая траектория предотвращения столкновения с упомянутым профилем местности на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата.
Изобретения представлены на фигурах, где идентичные ссылки указывают подобные узлы.
Фиг.1 - структурная схема устройства согласно изобретению.
Фиг.2 - схема маневра подъема, принимаемого во внимание в настоящем изобретении.
Фиг.3 - график, дающий возможность проиллюстрировать существенные признаки настоящего изобретения.
Назначение устройства 1 по изобретению, схематически показанного на Фиг.1, состоит в том, чтобы автоматически обнаруживать всякую опасность столкновения летательного аппарата A, в частности военного транспортного летательного аппарата, с окружающей местностью 2 и для предупреждения экипажа летательного аппарата A, когда обнаружена такая опасность, из условия чтобы последний, в таком случае, мог осуществить маневр TE для предотвращения столкновения с местностью 2, как показано на Фиг.2.
Такое устройство 1, например, типа TAWS («Системы предупреждения и предотвращения столкновений с наземными препятствиями») или типа GPWS («Системы предупреждения опасного сближения с землей»), которое установлено на летательном аппарате A, обычным образом, содержит:
средство 5, которое осведомлено о профиле местности 6, по меньшей мере, впереди летательного аппарата A и которое, для этой цели, содержит, например, базу данных, содержащую упомянутый профиль 6 местности и/или средство распознавания местности, такое как радар. Упомянутый профиль 6 местности, например, находится на заранее определенной габаритной высоте G над рельефом 4;
средство 7, описанное ниже и, например, образующее часть сборки 8 источника данных, чья цель состоит в том, чтобы определять эффективные значения множества конкретных параметров полета, также описанных ниже;
центральный узел 9, который присоединен промежуточным звеном линий 11 и 12 связи, соответственно к упомянутому средству 5 и 7, и чья цель состоит в том, чтобы рассчитывать траекторию предотвращения столкновения по упомянутым эффективным значениям конкретных параметров полета, определенных упомянутым средством 7, чтобы проецировать эту траекторию впереди летательного аппарата A, и чтобы проверять, совместима ли упомянутая траектория, проецируемая вперед таким образом, с упомянутым профилем 6 местности, по меньшей мере, на протяжении заранее определенного расстояния (например, 10000 метров) впереди летательного аппарата A; и
средство 13, которое присоединено промежуточным звеном линии 14 связи к упомянутому центральному узлу 9, для передачи предупредительного сигнала (звукового и/или визуального) в случае обнаружения опасности столкновения упомянутым центральным узлом 9.
В соответствии с изобретением, упомянутый центральный узел 9 содержит:
узел 15 для расчета, с использованием эффективных значений (определенных упомянутым средством 7) некоторых из упомянутых конкретных параметров полета, как описано ниже, изменения ΔH высоты летательного аппарата A, которое обусловлено переходом энергии и изменением общего наклона, произведенным снижением скорости во время маневра предотвращения столкновения, выполняемого для того, чтобы предотвратить столкновение с местностью 2 впереди летательного аппарата A; и
узел 16, который присоединен линией 17 связи к упомянутому узлу 15, для использования изменения ΔH высоты, рассчитанного последним, для цели определения траектории предотвращения столкновения, которая является наилучшим возможным представлением реальности; и
узел 3, который присоединен линией 10 связи к упомянутому узлу 16, для использования траектории предотвращения столкновения, определенной последним, для цели проверки, совместима ли упомянутая траектория предотвращения столкновения с упомянутым профилем 6 местности на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата A.
Для того, чтобы делать это, упомянутый узел 3 использует вспомогательную кривую 18 (или кривую предотвращения столкновения), которая рассчитывается узлом 16, который показан на Фиг.3, и которая считается воспроизводящей маневр предотвращения столкновения. Упомянутый узел 3 заставляет эту вспомогательную кривую 18 двигаться прямолинейно впереди летательного аппарата A и он проверяет, что она не сталкивается с профилем 6 местности впереди текущего положения летательного аппарата A, по меньшей мере, на протяжении упомянутого заранее определенного расстояния. Таким образом, до тех пор, пока подвижная вспомогательная кривая 18, движимая таким образом, не сталкивается с профилем 6 местности, летательный аппарат A способен пролетать профиль 4 местности 2, которая находится спереди него.
Однако, когда, во время движения вспомогательной кривой 18, упомянутая вспомогательная кривая 18 сталкивается с профилем 6 местности, есть опасность столкновения с последним, так что, в таком случае, узел 3 предписывает средству 13 передавать предупредительный сигнал, как проиллюстрировано символом 19 на Фиг.2. Тогда пилот или автоматическая система управления заставляет летательный аппарат A следовать траектории TE предотвращения столкновения, предназначенной для предоставления упомянутому летательному аппарату A возможности пролетать рельеф 4 местности 2, которая находится спереди него, и, таким образом, избегать столкновения.
Вплоть до настоящего времени, обычная вспомогательная кривая 18A (предназначенная для воспроизведения маневра предотвращения столкновения) содержала, как показано пунктирной линией на Фиг.3:
первый участок 20A (или участок подъема), представляющий фазу подъема маневра предотвращения столкновения и предназначенный для предоставления летательному аппарату A возможности восстанавливать абсолютную высоту полета. Этот участок 20A подъема обычно создавался посредством учета постоянного коэффициента нагрузки летательного аппарата A таким способом, как для соответствия дуге окружности постоянного радиуса; и
участок 21A постоянного наклона, который тангенциально следует за этим участком 20A подъема.
Такая обычная вспомогательная кривая 18A не воспроизводит точно маневр предотвращения столкновения, фактически выполняемый летательным аппаратом A, если необходимо, каковое, в частности, может вызывать сигналы ложной тревоги (относящиеся к опасности столкновения).
Вспомогательная кривая 18 согласно изобретению дает возможность преодолевать этот недостаток посредством воспроизведения, оптимальным образом, маневра предотвращения столкновения, фактически выполняемого летательным аппаратом A. Для этой цели, согласно изобретению, упомянутая вспомогательная кривая 18 содержит, в дополнение к специальному участку 20 подъема, описанному ниже, и обычному участку 21 постоянного наклона, промежуточный участок 22, учитывающий упомянутое изменение ΔH высоты. Поэтому, эта вспомогательная кривая 18 учитывает динамическое повышение абсолютной высоты полета, начиная от конца упомянутого участка 20 подъема и делая это вплоть до начала упомянутого участка 21 постоянного наклона (который, поэтому, сдвинут вертикально вверх на упомянутое изменение ΔH высоты относительно упомянутого обычного участка 21A).
Для того, чтобы делать это, упомянутое средство 7 содержит узлы, конкретно не показанные, для того, чтобы, соответственно:
оценивать эффективную массу GW летательного аппарата A;
измерять текущую эффективную скорость VO летательного аппарата A; и
измерять текущий эффективный наклон γO (по отношению к земле) летательного аппарата A.
Кроме того, в первом варианте осуществления, для которого упомянутое изменение общего наклона соответствует изменению тяги, упомянутый узел 15 определяет изменение ΔH с использованием упомянутых эффективных значений и следующих выражений:
ΔH=[K1·(VO2-VF2)/2·g+(K2·(VO-VF)+K3)/(GW-GWO)]·f(x)
f(x)=f(X-XO; VF; GW; γF-γO)=(X-XO)/[K4·GW·VF·(γF-K5·γO)]
f(x) ∈[0;1],
в которых:
K1, K2, K3, K4 и K5 являются заранее определенными параметрами, зависящими от летательного аппарата A;
g представляет ускорение свободного падения;
GWO представляет заранее определенное постоянное значение массы летательного аппарата A, зависимое от упомянутого летательного аппарата A;
VF представляет постоянное значение скорости, соответствующее стабильной скорости, достигаемой в конце маневра предотвращения столкновения, это значение является заранее определенным и зависимым от упомянутого летательного аппарата A;
γF представляет постоянное значение наклона полета, соответствующее наклону полета относительно земли, стабилизируемому в конце маневра предотвращения столкновения, это значение является заранее определенным и зависимым от летательного аппарата A и от параметров состояния;
X представляет текущее положение летательного аппарата A на горизонтальной оси OX вертикальной плоскости OXZp симметрии летательного аппарата A; и
XO представляет положение летательного аппарата A на упомянутой горизонтальной оси OX упомянутой вертикальной плоскости OXZp в начале фазы изменения высоты упомянутого маневра предотвращения столкновения, как показано на Фиг.3.
Это изменение ΔH обусловлено, как упомянуто ранее, переходом энергии (вызывающим изменение ΔH1 высоты) и изменением силы тяги (вызывающим изменение ΔH2 высоты): ΔH=ΔH1+ΔH2.
Изменение ΔH1 высоты иллюстрирует превращение кинетической энергии в потенциальную энергию:
ΔH1=K1·(VO2-VF2)/2·g.
Кроме того, в этом первом варианте осуществления, изменение ΔH2 высоты обусловлено изменением тяги, которое производится снижением скорости.
Кроме того, во втором варианте осуществления, для которого изменение ΔH высоты обусловлено переходом энергии и изменением общего наклона, произведенным снижением скорости, упомянутое изменение ΔH высоты является функцией геометрического наклона γ:
ΔH ≈ ∫ γ·dx
Этот геометрический наклон, однако, равен сумме общего наклона γTOT и элемента ускорения:
γ=γTOT-(dVSOL/dt)/g
Общий наклон равен движущему соотношению, то есть разности между силой тяги и лобового сопротивления на массу:
γTOT≈(P-T)/m·g
Этот общий наклон γTOT способствует увеличению ΔH высоты, так как он увеличивается по мере того, как снижается скорость. Это увеличение общего наклона, который обратно пропорционален скорости, обусловлено повышением тяги, обратно пропорциональной скорости.
Фактически, это физическое явление в высокой степени усугублено в турбовинтовом двигателе, где доминирующий элемент выражения для тяги определяется, как:
P ≈ Полезная мощность / V
Изменение ΔH высоты, поэтому, может рассчитываться узлом 15, в этом втором варианте осуществления, этап за этапом, в качестве суммы двух вкладов:
ΔH3, которое относится к превращению кинетической энергии в потенциальную энергию, вызванному замедлениями; и
ΔH4, которое представляет общий наклон по данному этапу, то есть:
ΔH=ΔH3+ΔH4
причем, для этапа i
ΔH3=(Vi+1 2-Vi 2)/2·g
ΔH4=tg(γTOT)·Δxi.
Кроме того, в соответствии с изобретением, упомянутый центральный узел 9 дополнительно содержит:
узел 23 для расчета, с использованием эффективных значений массы GW и скорости VO летательного аппарата A (определенных упомянутым средством 7), коэффициента Nz нагрузки, который является представляющим реальный коэффициент нагрузки летательного аппарата A, в ходе фазы подъема маневра предотвращения столкновения, реально выполняемого летательным аппаратом A; и
дополнительный узел, например, узел 16, который присоединен линией 24 связи к упомянутому узлу 23, для использования упомянутого коэффициента Nz нагрузки (вместо заранее определенного постоянного коэффициента нагрузки, используемого вплоть до настоящего времени) для цели оптимизации упомянутого участка 20 подъема вспомогательной кривой 18. Этот коэффициент Nz нагрузки учитывается для расчета, обычным образом, радиуса дуги окружности, образующей этот участок 20 подъема.
В конкретном варианте осуществления, упомянутый узел 23 определяет упомянутый коэффициент Nz нагрузки с использованием следующего выражения:
Nz=n0+(n1·GW)+(n2·VO),
в котором n0, n1 и n2 являются заранее определенными параметрами.
Этот коэффициент Nz нагрузки является более близким к реальности, чем постоянный коэффициент нагрузки, используемый в предшествующем уровне техники, каковое дает возможность повышать соответствие участка 20 подъема вспомогательной кривой 18.
Траектория TE предотвращения столкновения, фактически используемая летательным аппаратом A, в случае обнаружения опасности столкновения устройством 1 и приведения в действие маневра предотвращения столкновения, таким образом, точно воспроизводится вспомогательной кривой 18, определенной в соответствии с настоящим изобретением, как показано на Фиг.3.
Следовательно, обнаружение опасности столкновения с местностью 2, используемое устройством 1, учитывает маневр предотвращения столкновения (в виде вспомогательной кривой 18), который очень близок к маневру предотвращения столкновения, фактически используемому, если необходимо, летательным аппаратом A, каковое, в частности, дает возможность избегать сигналов ложной тревоги и, таким образом, получать очень достоверное отслеживание.
В конкретном варианте осуществления, по меньшей мере, некоторые из упомянутых заранее определенных параметров n0, n1, n2, K1, K2 и K3 или из упомянутых постоянных значений GWO, VF и γF (зарегистрированных в центральном устройстве 9 или в сборке 8 источников данных) зависят от действующего режима полета летательного аппарата A. В этом случае, сборка 8 источников данных содержит средство, предназначенное для измерения параметров, дающее возможность определять текущий режим полета летательного аппарата A, который зависит, например, от фазы полета, аэродинамической конфигурации (предкрылков, закрылков) летательного аппарата A, его абсолютной высоты полета, и т.п.
Изобретение относится к области приборостроения и может найти применение в системах обеспечения безопасности летательных аппаратов (ЛА). Технический результат - расширение функциональных возможностей. Для достижения данного результата устройство (1) содержит средство (5) для хранения профиля местности, средство (7) для определения эффективных значений конкретных параметров полета, средство (9) проверки траектории полета, средство (13) для формирования предупредительного сигнала. При этом средство (9) проверки включает в себя, по меньшей мере, один элемент (15) для расчета изменения высоты. В ходе действия уклонения элемент (16) определяет курс уклонения ЛА. 4 н. и 7 з.п. ф-лы, 3 ил.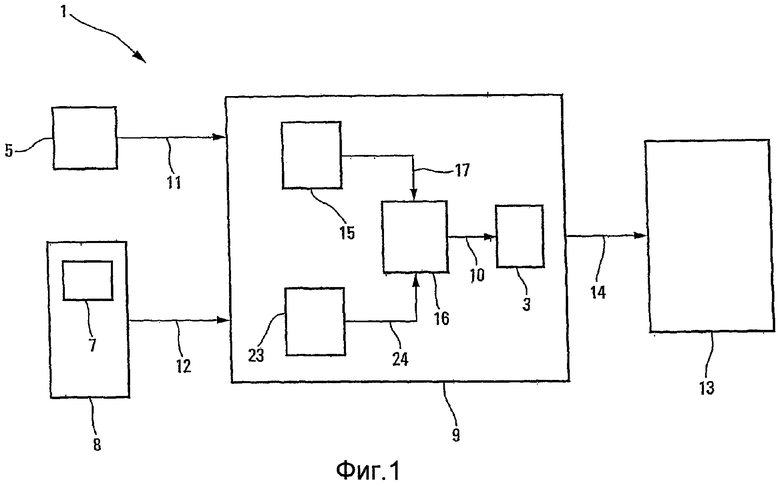
1. Способ для обнаружения опасности столкновения летательного аппарата (А) с окружающей местностью (2), согласно которому автоматическим и повторяющимся образом выполняется следующий ряд последовательных этапов:
a) учитывают профиль (6) местности (2), расположенной впереди летательного аппарата (А);
b) определяют эффективные значения конкретных параметров полета;
c) по этим эффективным значениям определяют траекторию предотвращения столкновения, содержащую, по меньшей мере, участок кабрирования и участок постоянного наклона, и ее проецируют впереди летательного аппарата (А);
d) проверяют, совместима ли упомянутая траектория предотвращения столкновения с упомянутым профилем (6) местности (2), по меньшей мере, на протяжении заранее определенного расстояния впереди летательного аппарата (А); и
e) если на этапе d) обнаружена несовместимость, передают соответствующий предупредительный сигнал (19), в котором
на этапе с): рассчитывают, с использованием определенных эффективных значений некоторых из упомянутых конкретных параметров полета, изменение (ΔН) высоты летательного аппарата (А), которое обусловлено переходом энергии и изменением общего наклона, произведенным снижением скорости во время маневра предотвращения столкновения; и изменение (ΔН) высоты, рассчитанное таким образом, используют для определения траектории предотвращения столкновения, которая является наилучшим возможным представлением реальности, и которая содержит, между участком кабрирования и участком при постоянном наклоне, промежуточный участок, который учитывает это изменение (ΔН) высоты; и на этапе d): траекторию предотвращения столкновения, определенную таким образом, используют для проверки, совместима ли такая траектория предотвращения столкновения с упомянутым профилем (6) местности (2) на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата (А).
2. Способ по п.1, в котором упомянутое изменение общего наклона, произведенное снижением скорости, соответствует изменению тяги.
3. Способ по п.2, в котором:
на этапе b): оценивают эффективную массу GW летательного аппарата (А); измеряют текущую скорость VO летательного аппарата (А); и измеряют текущий эффективный наклон γО летательного аппарата (А); и на этапе с): рассчитывают упомянутое изменение (ΔН) высоты с использованием следующих уравнений:
ΔН=[К1·(VO2-VF2)/2·g+(K2·(VO-VF)+K3)/(GW-GWO)]·f(x),
f(x)=f(X-XO; VF; GW; γF-γO),
f(x)∈[0;1], в которых:
K1, K2 и К3 являются заранее определенными параметрами, зависящими от летательного аппарата (А);
g представляет ускорение свободного падения;
GWO представляет заранее определенное постоянное значение массы летательного аппарата (А), зависящее от упомянутого летательного аппарата (А);
VF представляет постоянное значение скорости, соответствующее стабильной скорости, достигаемой в конце маневра предотвращения столкновения, это значение является заранее определенным и зависящим от летательного аппарата (А);
γF представляет постоянное значение наклона полета, соответствующее наклону полета относительно земли, стабилизируемому в конце маневра и предотвращения столкновения, это значение является заранее определенным и зависящим от летательного аппарата (А) и от параметров состояния;
Х представляет текущее положение летательного аппарата (А) на горизонтальной оси (ОХ) вертикальной плоскости (OXZp) симметрии летательного аппарата (А); и
ХО представляет положение летательного аппарата (А) на упомянутой горизонтальной оси (ОХ) упомянутой вертикальной плоскости (OXZp) в начале фазы изменения высоты упомянутого маневра предотвращения столкновения.
4. Способ по п.1, в котором на этапе с): упомянутое изменение ΔН высоты рассчитывают, этап за этапом, давая сумму:
первого изменения высоты, которое представляет преобразование кинетической энергии в потенциальную энергию, провоцируемое замедлением;
и второго изменения высоты, которое представляет общий наклон по данному этапу.
5. Способ по п.1, в котором
на этапе с): рассчитывают с использованием заранее определенных эффективных значений некоторых из упомянутых конкретных параметров полета, коэффициент нагрузки, который является представляющим фазу кабрирования маневра предотвращения столкновения; и коэффициент нагрузки, рассчитанный таким образом, используется для определения участка кабрирования траектории предотвращения столкновения, которая является наилучшим возможным представлением реальности; и на этапе d) участок кабрирования, определенный таким образом, используют для проверки, совместима ли траектория предотвращения столкновения с упомянутым профилем (6) местности (2) на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата (А).
6. Способ по п.5, в котором:
на этапе b): оценивают эффективную массу GW летательного аппарата (А); и измеряют текущую эффективную скорость VO летательного аппарата (А); и на этапе с): упомянутый коэффициент Nz нагрузки рассчитывается с использованием следующего выражения:
Nz=n0+(n1·GW)+(n2·VO),
в котором n0, n1 и n2 являются заранее определенными параметрами.
7. Способ по п.3, в котором, по меньшей мере, некоторые из упомянутых заранее определенных параметров и, если необходимо, упомянутые постоянные значения, зависят от действующего режима полета летательного аппарата (А).
8. Устройство для обнаружения опасности столкновения летательного аппарата (А) с окружающей местностью (2), упомянутое устройство (1) содержит:
первое средство (5), осведомленное о профиле (6) местности (2), расположенной впереди летательного аппарата (А);
второе средство (7) для определения эффективных значений конкретных параметров полета;
третье средство (9) для расчета, по упомянутым эффективным значениям,
траектории предотвращения столкновения и для проверки, совместима ли
упомянутая траектория предотвращения столкновения с упомянутым профилем
(6) местности (2), по меньшей мере, на протяжении заранее определенного расстояния впереди летательного аппарата (А); и
четвертое средство (13) для передачи соответствующего сигнала (19)
предупреждения, если упомянутое третье средство (9) обнаруживает несовместимость,
причем упомянутое третье средство (9) содержит, по меньшей мере:
первый элемент (15) для расчета, с использованием определенных эффективных значений некоторых из упомянутых конкретных параметров полета, изменения (ΔН) высоты летательного аппарата (А), которое обусловлено переходом энергии и изменением общего наклона, произведенным снижением скорости в ходе маневра предотвращения столкновения;
второй элемент (16) для использования изменения (ΔН) высоты, рассчитанного упомянутым первым элементом (15), для того, чтобы определять траекторию предотвращения столкновения, которая является наилучшим возможным представлением реальности; и
третий элемент (3) для использования траектории предотвращения столкновения, определенной упомянутым вторым элементом (16), для того чтобы проверять, совместима ли эта траектория предотвращения столкновения с упомянутым профилем (6) местности (2) на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата (А).
9. Устройство по п.8, в котором упомянутое третье средство (9) дополнительно содержит:
четвертый элемент (23) для расчета, с использованием определенных эффективных значений некоторых из упомянутых конкретных параметров полета, коэффициента нагрузки, который является представляющим фазу кабрирования маневра предотвращения столкновения;
пятый элемент (16) для использования коэффициента нагрузки, рассчитанного упомянутым четвертым элементом (23), для того чтобы определять участок кабрирования траектории предотвращения столкновения, которая является наилучшим возможным представлением реальности; и шестой элемент (3) для использования этого участка кабрирования, определенного упомянутым пятым элементом (16), для того чтобы проверять, совместима ли упомянутая траектория предотвращения столкновения с упомянутым профилем (6) местности (2) на протяжении упомянутого заранее определенного расстояния впереди летательного аппарата (А).
10. Летательный аппарат, отличающийся тем, что он содержит устройство (1), способное осуществлять способ по п.1.
11. Летательный аппарат, отличающийся тем, что он содержит устройство (1) по п.8.
| US 5922031 А, 13.07.1999 | |||
| US 3018049 A, 23.01.1962 | |||
| US 4144571 A, 13.03.1979 | |||
| Регулируемая тепловая труба | 1980 |
|
SU937963A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

