Настоящее изобретение касается способа и устройства помощи в пилотировании летательного аппарата, предназначенных для помощи в пилотировании летательного аппарата, по меньшей мере, во время автономного захода на посадочную полосу с целью осуществления посадки, в частности, в области военной авиации.
В рамках настоящего изобретения считается, что автономный заход на посадку должен обеспечивать полет летательного аппарата без использования наземных навигационных средств в метеорологических условиях полета по приборам типа IMC (“Instrument Meteorological Conditions” на английском языке) до высоты принятия решения, например, 200 футов (примерно 60 метров), которая соответствует высоте принятия решения для обычного точного захода типа ILS (“Instrument Landing System” на английском языке, то есть система посадки по приборам) категории 1. Во время такого автономного захода на посадку летательным аппаратом используются исключительно бортовые средства определения положения, в частности, спутниковая система определения положения, например, типа GPS (“Global Positioning System” на английском языке), инерционный блок и барометрические датчики. Заход на посадку можно также осуществлять без участия диспетчера воздушного пространства. На упомянутой высоте принятия решения экипаж летательного аппарата должен визуально наблюдать полосу. Если это так он завершает посадку в визуальном режиме при помощи ручного управления. А если на высоте принятия решения экипаж не видит полосу, он должен осуществить полосу, на второй круг для подъема летательного аппарата на заранее определенную безопасную высоту. Траектория захода на посадку, используемая для осуществления такого автономного захода, разработана заранее до полета и проложена на бумажной карте, которая находится в распоряжении экипажа во время полета. Для этого производят анализ конфигурации местности вокруг посадочной полосы и определяют запасы по отношению к препятствиям. Эта траектория захода на посадку сохраняется также в базе данных системы пилотирования летательного аппарата.
Как было указано выше, высота принятия решения при автономном заходе на посадку, рассматриваемом в рамках настоящего изобретения, является высотой принятия решения при точном заходе на посадку по категории 1, то есть применяемом в гражданской авиации. Для применения такого точного захода на посадку по приборам типа ILS обычно используют наземные станции, расположенные вдоль края полосы, и, по меньшей мере, один специальный радиоприемник, установленный на борту летательного аппарата, который обеспечивает управление полетом по горизонтали и вертикали перед посадкой и во время посадки и показывает пилоту боковое отклонение по отношению к линии захода на посадку и вертикальное отклонение по отношению к плоскости снижения. Такой точный заход на посадку по приборам обеспечивает существенную и эффективную поддержку при посадке, в частности, в условиях плохой видимости (туман и т.д.) или в отсутствие видимости. Таким образом, такой точный заход на посадку по приборам использует информацию, получаемую извне. Этот случай не рассматривается для автономного захода на посадку в рамках настоящего изобретения, при котором помощь в пилотировании обеспечивается исключительно бортовыми средствами, как было указано выше.
Также линию захода, определенную для точного захода на посадку по приборам, нельзя использовать при автономном заходе на посадку, в частности, в силу того, что в случае автономного захода на посадку не обеспечиваются рабочие характеристики летательного аппарата, необходимые для выполнения такого точного захода на посадку по приборам.
Известно, что в основном характеристики летательного аппарата делятся на составляющую определения местоположения и составляющую наведения. Составляющая наведения позволяет оценить способность летательного аппарата придерживаться рассматриваемой линии захода на посадку с определенной точностью. Что касается составляющей определения местоположения, то она позволяет гарантировать действительное положение летательного аппарата. Эти рабочие характеристики рассматриваются одновременно в вертикальной плоскости и в горизонтальной плоскости.
Однако в случае автономного захода на посадку, для которого определение местоположения летательного аппарата осуществляют исключительно на основании информации, имеющейся на борту летательного аппарата, требуемые рабочие характеристики не могут быть достигнуты в вертикальной плоскости по причине большого предела погрешности касательно вышеуказанной составляющей определения местоположения.
Следовательно, в рамках автономного захода на посадку в области военной авиации, рассматриваемого настоящим изобретением, невозможно выполнить такой точный заход по приборам, как используется в гражданской авиации.
Задачей настоящего изобретения является устранение вышеуказанных недостатков. Его объектом является способ помощи в пилотировании летательного аппарата, предназначенный для помощи в пилотировании летательного аппарата, по меньшей мере, во время автономного захода на посадочную полосу с целью осуществления посадки.
С этой целью, в соответствии с изобретением, упомянутый способ, согласно которому:
а) определяют линию захода на посадку и
б) ведут летательный аппарат по упомянутой линии захода на посадку, по меньшей мере, до высоты принятия решения исключительно при помощи бортовых средств летательного аппарата,
отличается тем, что:
- на этапе а):
а1) определяют главную линию захода на посадку, которая характеризует точный заход на посадку по категории 1 и
а2) определяют вертикальную поправку и на основании этой вертикальной поправки и упомянутой главной линии захода на посадку определяют скорректированную линию захода на посадку, которая в вертикальном направлении имеет дополнительный запас относительно пролетаемой местности по отношению к упомянутой главной линии захода на посадку и
- на этапе б) ведут упомянутый летательный аппарат по упомянутой скорректированной линии захода на посадку.
Таким образом, благодаря изобретению летательный аппарат ведут по скорректированной линии захода на посадку, которая имеет вертикальный запас относительно пролетаемой местности по отношению к линии захода на посадку, определенной обычным путем для точного захода на посадку по категории 1. Следовательно, этот вертикальный запас позволяет обезопасить полет летательного аппарата относительно земли во время автономного захода на посадку, для которого (как было указано выше) текущие рабочие характеристики летательного аппарата являются меньшими по сравнению с текущими рабочими характеристиками для обычного точного захода на посадку по приборам по категории 1.
Следует отметить, что благодаря изобретению можно использовать информацию, определенную обычным путем для точного захода на посадку по категории 1. Это облегчает, в частности, осуществление изобретения. Точный заход на посадку по приборам по категории 1 описан, в частности, в приложении 10 ИКАО (Международная Организация гражданской авиации или International Civil Aviation Organization на английском языке).
В частном варианте выполнения на этапе а):
- сравнивают наклон упомянутой скорректированной линии захода на посадку с дополнительным наклоном, представляющим собой максимальный наклон, допустимый для полета летательного аппарата и
- если наклон упомянутой скорректированной линии захода на посадку превышает упомянутый дополнительный наклон, выдают сообщение, указывающее пилоту летательного аппарата, что рабочие характеристики упомянутого летательного аппарата не позволяют лететь по этой скорректированной линии захода на посадку.
Кроме того, предпочтительно пилот летательного аппарата получает, по меньшей мере, на одном экране отображения первое и второе средство индикации, представляющие соответственно упомянутую главную линию захода на посадку и упомянутую скорректированную линию захода на посадку.
В рамках настоящего изобретения упомянутая вертикальная поправка, позволяющая определить скорректированную линию захода на посадку, может быть получена разными путями. В предпочтительном варианте выполнения на этапе а2) определяют упомянутую вертикальную поправку и упомянутую скорректированную линию захода на посадку с учетом текущих рабочих характеристик летательного аппарата.
Таким образом, скорректированную линию захода на посадку адаптируют к реальной текущей ситуации летательного аппарата. Необходимо отметить, что для этого рабочие характеристики летательного аппарата, как правило, известны, автоматически, от обычных систем, установленных на борту последнего.
В предпочтительном варианте выполнения, в его первой версии, упомянутую скорректированную линию захода на посадку определяют при помощи поправки наклона, при этом наклон Р2 упомянутой скорректированной линии захода на посадку удовлетворяет следующему соотношению:
Р2=arctg[(H.tgP0)/(H.(tgP0/tgP1)-ΔH)],
в котором:
- tg является тангенсом;
- arctg является значением, обратным тангенсу;
- Р0 является наклоном, определяющим конус безопасности, относящийся к точному заходу на посадку по категории 1;
- Р1 является наклоном упомянутой главной линии захода на посадку;
- Н является упомянутой высотой принятия решения;
- ΔН является вертикальным запасом, зависящим от текущих рабочих характеристик летательного аппарата.
Кроме того, во второй версии определяют упомянутую скорректированную линию захода на посадку как линию:
- которая параллельна упомянутой главной линии захода на посадку;
- которую сдвигают горизонтально вперед в направлении полета летательного аппарата; и
- горизонтальный сдвиг ΔL которой удовлетворяет следующему соотношению:
ΔL=ΔH/tgP0,
в котором:
- tg является тангенсом;
- ΔН является вертикальным запасом, зависящим от текущих рабочих характеристик летательного аппарата;
- Р0 является наклоном, определяющим конус безопасности, относящийся к точному заходу на посадку по категории 1.
Кроме того, в рамках настоящего изобретения на упомянутом этапе а2 можно также определить упомянутую скорректированную линию захода на посадку:
- при помощи первой поправки наклона, при этом наклон упомянутой скорректированной линии захода на посадку соответствует наклону упомянутой главной линии захода на посадку, увеличенному на заранее определенное значение наклона;
- при помощи второй поправки наклона, при этом наклон упомянутой скорректированной линии захода на посадку соответствует наклону упомянутой главной линии захода на посадку, умноженному на заранее определенное значение;
- при помощи поправки высоты постоянного значения.
Объектом настоящего изобретения является также устройство помощи в пилотировании летательного аппарата, в частности военного транспортного самолета, которое предназначено для помощи в пилотировании летательного аппарата, по меньшей мере, во время автономного захода на посадку вышеуказанного типа.
Для этого, согласно изобретению, упомянутое устройство, содержащее:
- систему управления полетом для определения линии захода на посадку;
- систему наведения для помощи в ведении летательного аппарата по упомянутой линии захода на посадку, по меньшей мере, до высоты принятия решения исключительно при помощи информации, имеющейся на борту летательного аппарата,
отличается тем, что упомянутая система управления полетом содержит:
- первое средство для определения главной линии захода на посадку, которая характеризует точный заход на посадку по категории 1;
- второе средство для определения, с одной стороны, вертикальной поправки и, с другой стороны, на основании этой вертикальной поправки и упомянутой главной линии захода на посадку - скорректированной линии захода на посадку, которая имеет в вертикальном направлении дополнительный запас относительно пролетаемой местности по отношению к упомянутой главной линии захода на посадку, при этом упомянутая скорректированная линия захода передается в упомянутую систему наведения для помощи в ведении летательного аппарата по этой скорректированной линии захода на посадку.
В частном варианте выполнения упомянутое устройство дополнительно содержит средство контроля для:
- сравнения наклона упомянутой скорректированной линии захода на посадку с дополнительным наклоном, представляющим собой максимальный наклон, допустимый для полета летательного аппарата; и
- если наклон упомянутой скорректированной линии захода на посадку превышает упомянутый дополнительный наклон, выдачи сообщения, указывающего пилоту летательного аппарата, что рабочие характеристики упомянутого летательного аппарата не позволяют лететь по этой скорректированной линии захода на посадку.
Кроме того, предпочтительно устройство в соответствии с настоящим изобретением может дополнительно содержать:
- средства отображения для предоставления пилоту летательного аппарата, по меньшей мере, на одном экране отображения, первого и второго средств индикации, характеризующих соответственно упомянутую главную линию захода на посадку и упомянутую скорректированную линию захода на посадку; и/или
- интерфейсные средства, позволяющие пилоту ввести, по меньшей мере, одно значение высоты принятия решения, например, в систему управления полетом.
Настоящее изобретение будет более очевидно из нижеследующего описания со ссылками на прилагаемые чертежи. На этих чертежах идентичными позициями обозначены одинаковые элементы.
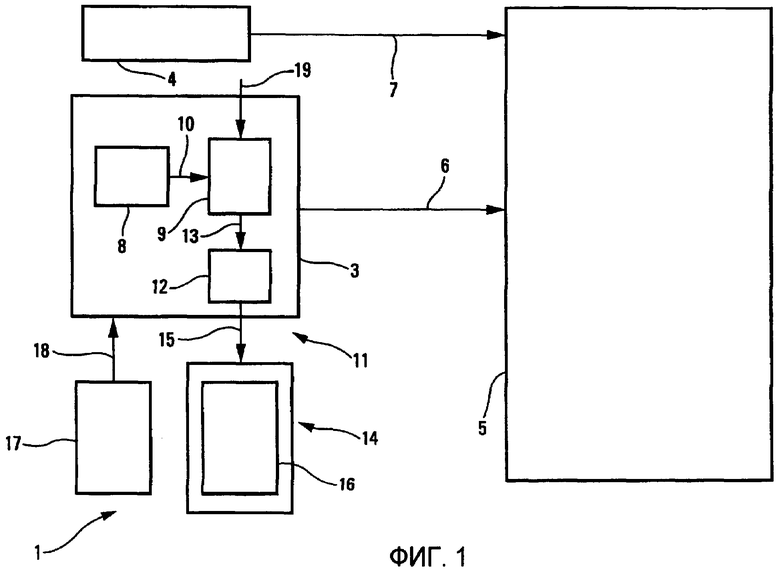
Фиг.1 - структурная схема устройства помощи в пилотировании в соответствии с настоящим изобретением.
Фиг.2 и 3 - графики, позволяющие выявить преимущества настоящего изобретения соответственно в двух разных вариантах выполнения.
Устройство 1 в соответствии с настоящим изобретением, схематически показанное на фиг.1, предназначено для помощи в пилотировании летательного аппарата, в частности военного транспортного самолета, по меньшей мере, во время автономного захода на посадочную полосу 2 с целью осуществления посадки.
Для этого упомянутое устройство 1 содержит:
- систему 3 управления полетом, например, типа FMS (“Flight Management System” на английском языке), которая позволяет определить линию захода на посадку;
- комплекс 4 обычных источников информации, содержащий, в частности, средства определения местоположения;
- систему 5 наведения, которая соединена при помощи соединений 6 и 7 соответственно с упомянутой системой 3 управления полетом и с упомянутым комплексом 4 и которая предназначена для помощи в ведении летательного аппарата по линии захода на посадку, определенной упомянутой системой 3 управления полетом, автономно, то есть исключительно при помощи информации, имеющейся на борту летательного аппарата (и получаемой, по меньшей мере, частично от упомянутого комплекса 4), до высоты Н принятия решения, которая будет уточнена ниже.
В предпочтительном варианте выполнения упомянутое средство 5 наведения содержит следующие средства, не показанные конкретно:
- средство вычисления, которое предназначено для определения обычным путем заданных значений пилотирования на основании информации, полученной от упомянутой системы 3 управления полетом через соединение 6 и от упомянутого комплекса 4 через соединение 7;
- по меньшей мере, одно средство помощи в пилотировании, например, устройство автоматического пилотирования и/или командный пилотажный прибор, которое на основании упомянутых заданных значений пилотирования, полученных от упомянутого средства вычисления, определяет команды пилотирования летательного аппарата;
- средства приведения в действие управляемых органов, например, таких как рули (направления, высоты и т.д.) летательного аппарата, к которым применяют определенные таким образом команды пилотирования.
Согласно изобретению, упомянутая система 3 управления полетом содержит:
- средство 8, которое содержит, например, не показанную на чертеже базу данных и которое позволяет определить обычным способом главную линию захода на посадку А1. Согласно изобретению, эта главная линия захода на посадку А1 характеризует точный заход на посадку по приборам по категории 1. Необходимо отметить, что такой точный заход на посадку по категории 1 описан, в частности, в приложении 10 ИКАО (Международная Организация гражданской авиации или International Civil Aviation Organization на английском языке); и
- средство 9, которое соединено через соединение 10 с упомянутым средством 8 и которое выполнено с возможностью определять:
- с одной стороны, вертикальную поправку; и
- с другой стороны, на основании этой вертикальной поправки и упомянутой главной линии захода на посадку А1, полученной от упомянутого средства 8, - скорректированную линию захода на посадку А2, которая в вертикальном направлении имеет дополнительный запас относительно пролетаемой местности по отношению к упомянутой главной линии захода на посадку А1 (на упомянутой высоте принятия решения Н).
Кроме того, согласно изобретению, упомянутую скорректированную линию захода на посадку А2, которая определена упомянутым средством 9, передают через соединение 6 в систему 5 наведения, чтобы упомянутая система 5 наведения помогала вести летательный аппарат по этой скорректированной линии захода на посадку А2. Для этого пилотирование летательного аппарата может осуществляться либо автоматически, например, посредством устройства автоматического пилотирования, либо вручную пилотом летательного аппарата, например, при помощи командного пилотажного прибора.
Таким образом, во время захода на посадочную полосу 2 устройство 1 в соответствии с настоящим изобретением ведет летательный аппарат по скорректированной линии захода на посадку А2, которая на высоте принятия решения Н имеет вертикальный запас ΔН относительно пролетаемой местности по отношению к линии захода на посадку А1, определенной обычным путем для точного захода на посадку категории 1. Следовательно, этот вертикальный запас ΔН позволяет обезопасить полет летательного аппарата относительно земли во время автономного захода на посадку, осуществляемого устройством 1, при котором текущие рабочие характеристики летательного аппарата являются меньшими, чем текущие рабочие характеристики при обычном точном заходе на посадку по приборам по категории 1.
Кроме того, поскольку средство 8 использует информацию, определенную обычным путем для точного захода категории 1, применение изобретения облегчается.
В частном варианте выполнения упомянутое устройство 1 дополнительно содержит средство 11 контроля, которое, например, встроено, по меньшей мере, частично в упомянутую систему 3 управления полетом и которое содержит:
- средство 12, которое соединено через соединение 13 с упомянутым средством 9 и которое выполнено с возможностью сравнения наклона Р2 упомянутой скорректированной линии захода на посадку А2, определенной упомянутым средством 9, с дополнительным наклоном, который представляет собой максимальный наклон, допустимый для полета летательного аппарата в соответствии с его сертификацией;
- средство 14 (например, средства отображения), которое соединено через соединение 15 с упомянутым средством 12 и которое выполнено с возможностью подачи сообщения (звукового и/или визуального), указывающего пилоту летательного аппарата, что рабочие характеристики упомянутого летательного аппарата не позволяют производить полет по упомянутой скорректированной линии захода на посадку А2, если наклон Р2 последней становится больше упомянутого дополнительного наклона.
Средство 14 может представлять это сообщение, в частности, на экране отображения 16, который входит, например, в комплект упомянутой системы 3 управления полетом.
Кроме того, в частном варианте выполнения упомянутое устройство 1 также содержит средства отображения, например, упомянутое средство 14 для предоставления пилоту летательного аппарата, по меньшей мере, на одном экране отображения в кабине летчиков, в частности, на экране отображения 16, первых и вторых средств индикации (например, графическое изображение траектории, отображаемое на части экрана, показывающей вертикальную плоскость), представляющих соответственно упомянутую главную линию захода на посадку А1 и упомянутую скорректированную линию захода на посадку А2).
В рамках настоящего изобретения упомянутое средство 9 может по-разному определять упомянутую вертикальную поправку, позволяющую определить скорректированную линию захода на посадку А2.
В предпочтительном варианте выполнения упомянутое средство 9 определяет упомянутую вертикальную поправку и упомянутую скорректированную линию захода на посадку А2 с учетом текущих рабочих характеристик летательного аппарата. Таким образом, устройство 1 в соответствии с настоящим изобретением адаптирует скорректированную линию захода на посадку А2 к действительной текущей ситуации летательного аппарата. Для этого используемые рабочие характеристики летательного аппарата автоматически принимаются средством 9 (через соединение 19, показанное в общем виде) от обычных систем (не показаны), установленных на борту упомянутого летательного аппарата.
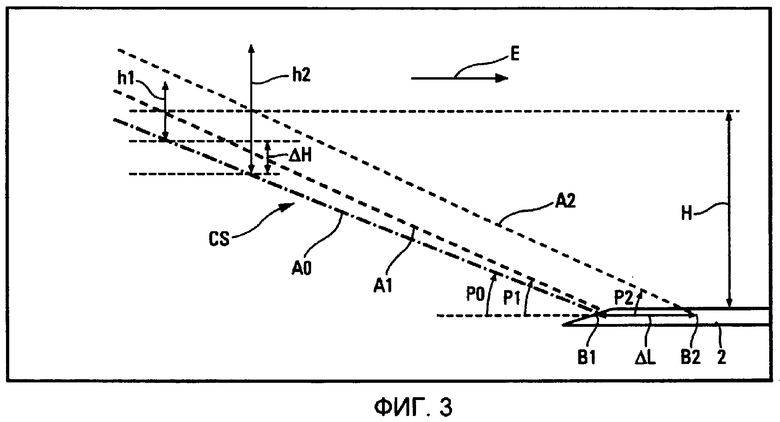
В предпочтительном варианте выполнения в первой версии, показанной на фиг.2, упомянутое средство 9 определяет упомянутую скорректированную линию захода на посадку А2 при помощи поправки наклона. Наклон Р2 упомянутой скорректированной линии захода А2 удовлетворяет следующему соотношению:
Р2=arctg[(H.tgP0)/(H.(tgP0/tgP1)-ΔH)],
в котором:
- tg является тангенсом;
- arctg является значением, обратным тангенсу;
- Р0 является наклоном (например, 2°), определяющим конус безопасности CS, относящийся к точному заходу на посадку по приборам по категории 1 и показанный на фиг.2 линией А0, показывающий его нижний край;
- Р1 является наклоном (например, 3°) упомянутой главной линии захода на посадку А1;
- Н является упомянутой высотой принятия решения, например, 200 футов (примерно 60 метров), которая может быть введена в систему 3 управления полетом пилотом летательного аппарата, в частности при помощи обычного интерфейсного средства 17, которое соединено через соединение 18 с упомянутой системой 3 управления полетом;
- ΔН является упомянутым вертикальным запасом, зависящим от текущих рабочих характеристик летательного аппарата.
Как показано на фиг.2, на высоте принятия решения Н конус безопасности CS представляет:
- уменьшенную высоту h1 по отношению к главной линии захода на посадку А1; и
- высоту h2, превышающую высоту h1 (на значение 2ΔН), по отношению к скорректированной линии захода на посадку А2.
Следовательно, поскольку рабочие характеристики летательного аппарата во время автономного захода на посадку, рассматриваемого в настоящем изобретении, не могут гарантировать, что летательный аппарат останется в конусе безопасности CS на главной линии захода на посадку А1 (относящейся к точному заходу), устройство 1 в соответствии с настоящим изобретением выполняет поправку по высоте, позволяющую добавить запас ΔН по отношению к пролетаемой местности. Это позволяет опосредованно расширить конус безопасности до высоты h2, когда летательный аппарат следует по упомянутой скорректированной линии захода на посадку А2, по отношению к конусу безопасности CS, определенному для главной линии захода на посадку А1.
Кроме того, во второй версии упомянутого второго предпочтительного варианта выполнения, как показано на фиг.3, упомянутое средство 9 определяет упомянутую скорректированную линию захода на посадку как линию А2:
- которая параллельна упомянутой главной линии захода на посадку А1;
- которую сдвигают горизонтально вперед в направлении Е полета летательного аппарата;
- горизонтальный сдвиг ΔL которой удовлетворяет следующему соотношению:
ΔL=ΔH/tgP0.
Таким образом, получают сдвиг ΔL точки привязки к земле линии захода на посадку от точки В1 для главной линии захода на посадку А1 к точке В2 для скорректированной линии захода на посадку А2.
Следует отметить, что этот сдвиг точки привязки к земле приводит к увеличению посадочной дистанции, так как отодвигается точка приземления на посадочной полосе 2. Поэтому на высоте принятия решения Н пилоту рекомендуется увеличить наклон захода на посадку на порог полосы, чтобы сократить посадочную дистанцию. Устройство 1 может также содержать сигнальное средство (не показано) для предупреждения экипажа в случае, если посадочная дистанция является слишком длинной по отношению к длине посадочной полосе 2.
Возможны также другие варианты выполнения, позволяющие средству 9 определять скорректированную линию захода на посадку А2.
В первом альтернативном варианте выполнения упомянутое средство 9 определяет упомянутую скорректированную линию захода на посадку А2 при помощи первой поправки наклона. В этом случае наклон упомянутой скорректированной линии захода на посадку А2 соответствует наклону упомянутой главной линии захода на посадку А1, увеличенному на заранее определенное значение наклона, например, на 0,3°.
Кроме того, во втором альтернативном варианте выполнения упомянутое средство 9 определяет упомянутую скорректированную линию захода на посадку А2 при помощи второй поправки наклона. В этом случае наклон упомянутой скорректированной линии захода на посадку А2 соответствует наклону упомянутой главной линии захода на посадку А1, умноженному на заранее определенное значение, например, 0,1.
В этих двух последних альтернативных вариантах выполнения поправка не зависит ни от высоты принятия решения Н, ни от действительных рабочих характеристик летательного аппарата.
Кроме того, в третьем альтернативном варианте выполнения упомянутое средство 9 определяет скорректированную линию захода на посадку А2 при помощи поправки высоты постоянного значения. В этом случае поправка тоже не зависит от действительных рабочих характеристик летательного аппарата. Предпочтительно эта поправка учитывает консервативные предположения, фиксируя необходимый запас для номинальных рабочих характеристик летательного аппарата.
Следовательно, в рамках настоящего изобретения учитываемой траекторией автономного захода на посадку будет скорректированная траектория или линия захода на посадку А2, которую определяют на основании главной линии захода на посадку А1, представляющей собой обычный точный заход на посадку по приборам по категории 1. Информация, относящаяся к этой главной линии захода на посадку А1, обычно сохраняется в базе данных средства 8. Как правило, эта информация указана также на бумажной карте захода на посадку, имеющейся в распоряжении экипажа. Во время полета экипаж вводит автономный заход на посадку, например, через интерфейсное средство 17 системы 3 управления полетом в свой полетный план. В этом случае информацию, относящуюся к главной линии захода на посадку А1, получают из базы данных. Экипаж информирует также систему 3 управления полетом о высоте принятия решения Н для захода на посадку через упомянутое интерфейсное средство 17. Эта высота принятия решения Н определена на карте захода на посадку. На заранее определенном расстоянии от аэропорта назначения, например, за 100 морских миль (примерно 180 километров) средство 9 системы 3 управления полетом вычисляет вертикальную поправку, предпочтительно в зависимости от высоты принятия решения Н, вводимой экипажем, и от действительных рабочих характеристик летательного аппарата, получаемых через соединение 19 от непоказанных систем летательного аппарата и, в частности, от системы определения местоположения. В этом случае упомянутое средство 9 определяет скорректированную линию захода на посадку А2, по которой должен следовать летательный аппарат при помощи системы 5 наведения.
Изобретение относится к способу и устройству управления летательными аппаратами. Способ и устройство помощи в пилотировании летательного аппарата заключаются в том, что для определения линии захода на посадку и для ведения летательного аппарата по этой линии при помощи системы наведения определяют главную линию захода на посадку (А1) и скорректированную линию, имеющую в вертикальном направлении дополнительный запас (ΔН) относительно пролетаемой местности по отношению к главной линии захода на посадку, которая характеризует точный заход на посадку по категории 1. Система наведения ведет летательный аппарат по скорректированной линии захода на посадку. Достигается существенная и эффективная поддержка при посадке в условиях плохой видимости или в отсутствие видимости. 3 н. и 11 з.п. ф-лы, 3 ил.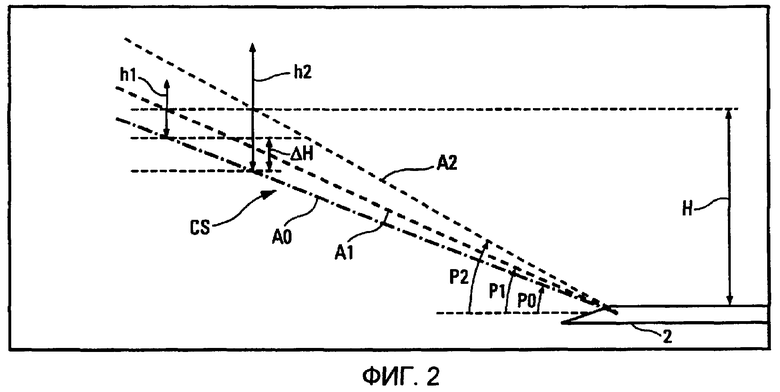
1. Способ помощи в пилотировании летательного аппарата, предназначенный для помощи в пилотировании летательного аппарата, по меньшей мере, во время автономного захода на посадочную полосу (2) с целью осуществления посадки, согласно которому а) определяют линию захода на посадку и б) ведут летательный аппарат по упомянутой линии захода на посадку, по меньшей мере, до высоты принятия решения (Н) исключительно при помощи бортовых средств летательного аппарата, отличающийся тем, что на этапе а) а1) определяют главную линию захода на посадку (А1), которая характеризует точный заход на посадку по категории 1 и а2) определяют вертикальную поправку и на основании этой вертикальной поправки и упомянутой главной линии захода на посадку (А1) определяют скорректированную линию захода на посадку (А2), которая в вертикальном направлении имеет дополнительный запас (ΔН) относительно пролетаемой местности по отношению к упомянутой главной линии захода на посадку (А1), и на этапе б) ведут упомянутый летательный аппарат по упомянутой скорректированной линии захода на посадку (А2).
2. Способ по п.1, отличающийся тем, что на этапе а) сравнивают наклон (Р2) упомянутой скорректированной линии захода на посадку (А2) с дополнительным наклоном, представляющим собой максимальный наклон, допустимый для полета летательного аппарата, и если наклон (Р2) упомянутой скорректированной линии захода на посадку (А2) превышает упомянутый дополнительный наклон, выдают сообщение, указывающее пилоту летательного аппарата, что рабочие характеристики упомянутого летательного аппарата не позволяют лететь по этой скорректированной линии захода на посадку (А2).
3. Способ по п.1, отличающийся тем, что пилот летательного аппарата получает, по меньшей мере, на одном экране отображения (16) первое и второе средства индикации, показывающие соответственно упомянутую главную линию захода на посадку (А1) и упомянутую скорректированную линию захода на посадку (А2).
4. Способ по п.1, отличающийся тем, что на этапе а2) определяют упомянутую вертикальную поправку и упомянутую скорректированную линию захода на посадку А2) с учетом текущих рабочих характеристик летательного аппарата.
5. Способ по п.4, отличающийся тем, что на этапе а2) упомянутую скорректированную линию захода на посадку (А2) определяют при помощи поправки наклона, при этом наклон Р2 упомянутой скорректированной линии захода на посадку (А2) удовлетворяет следующему соотношению: P2=arctg[(H·tgP0)/(H·(tgP0/tgP1)-ΔH)],
в котором tg является тангенсом, arctg является значением, обратным тангенсу, Р0 является наклоном, определяющим конус безопасности (CS), относящийся к точному заходу на посадку по категории 1, P1 является наклоном упомянутой главной линии захода на посадку (А1), Н является упомянутой высотой принятия решения и ΔН является вертикальным запасом, зависящим от текущих характеристик летательного аппарата.
6. Способ по п.4, отличающийся тем, что на этапе а2) упомянутую скорректированную линию захода на посадку определяют как линию, которая параллельна упомянутой главной линии захода на посадку (А1), которую сдвигают горизонтально вперед в направлении полета летательного аппарата и горизонтальный сдвиг ΔL которой удовлетворяет следующему соотношению ΔL=ΔH/tgP0, в котором tg является тангенсом, ΔН является вертикальным запасом, зависящим от текущих рабочих характеристик летательного аппарата, и Р0 является наклоном, определяющим конус безопасности (CS), относящийся к точному заходу на посадку по категории 1.
7. Способ по п.1, отличающийся тем, что на этапе а2) определяют упомянутую скорректированную линию захода на посадку (А2) при помощи поправки наклона, при этом наклон упомянутой скорректированной линии захода на посадку (А2) соответствует наклону упомянутой главной линии захода на посадку (А1), увеличенному на заранее определенное значение наклона.
8. Способ по п.1, отличающийся тем, что на этапе а2) определяют упомянутую скорректированную линию захода на посадку (А2) при помощи поправки наклона, при этом наклон упомянутой скорректированной линии захода на посадку (А2) соответствует наклону упомянутой главной линии захода на посадку (А1), умноженному на заранее определенное значение.
9. Способ по п.1, отличающийся тем, что на этапе а2) определяют упомянутую скорректированную линию захода на посадку (А2) при помощи поправки высоты постоянного значения.
10. Устройство помощи в пилотировании летательного аппарата, которое предназначено для помощи в пилотировании летательного аппарата, по меньшей мере, во время автономного захода на посадочную полосу (2) с целью осуществления посадки, при этом упомянутое устройство (1) содержит систему (3) управления полетом для определения линии захода на посадку и систему (5) наведения для помощи в ведении летательного аппарата по упомянутой линии захода на посадку, по меньшей мере, до высоты принятия решения (Н) исключительно при помощи информации, имеющейся на борту летательного аппарата, отличающееся тем, что упомянутая система (3) управления полетом содержит первое средство (8) для определения главной линии захода на посадку (А1), которая характеризует точный заход по категории 1, и второе средство (9) для определения, с одной стороны, вертикальной поправки и, с другой стороны, на основании этой вертикальной поправки и упомянутой главной линии захода на посадку (A1) - скорректированной линии захода на посадку (А2), которая имеет в вертикальном направлении дополнительный запас относительно пролетаемой местности по отношению к упомянутой главной линии захода на посадку (A1), при этом упомянутая скорректированная линия захода на посадку (А2) передается в упомянутую систему (5) наведения для помощи в ведении летательного аппарата по этой скорректированной линии захода на посадку (А2).
11. Устройство по п.10, отличающееся тем, что дополнительно содержит средство (11) контроля для сравнения наклона (Р2) упомянутой скорректированной линии захода на посадку (А2) с дополнительным наклоном, представляющим собой максимальный наклон, допустимый для полета летательного аппарата, и, если наклон (Р2) упомянутой скорректированной линии захода на посадку (А2) превышает упомянутый дополнительный наклон, выдачи сообщения, указывающего пилоту летательного аппарата, что рабочие характеристики упомянутого летательного аппарата не позволяют лететь по упомянутой скорректированной линии захода на посадку (А2).
12. Устройство по п.10, отличающееся тем, что дополнительно содержит средства (14) отображения для предоставления пилоту летательного аппарата, по меньшей мере, на одном экране отображения (16) первого и второго средств индикации, показывающих соответственно упомянутую главную линию захода на посадку (A1) и упомянутую скорректированную линию захода на посадку (А2).
13. Устройство по п.10, отличающееся тем, что дополнительно содержит интерфейсные средства (17), позволяющие пилоту ввести, по меньшей мере, одно значение высоты принятия решения (Н).
14. Летательный аппарат, отличающийся тем, что содержит устройство (1) по п.10.
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| RU 97111597 A, 27.05.1999 | |||
| US 5593114 A, 14.01.1997 | |||
| ВСПОМОГАТЕЛЬНОЕ ПОСАДОЧНОЕ УСТРОЙСТВО | 1995 |
|
RU2184993C2 |

