Настоящее изобретение касается способа и системы помощи в пилотировании летательного аппарата, который выполнен с возможностью осуществления полета на малой высоте.
В рамках настоящего изобретения под полетом на малой высоте следует понимать полет вдоль траектории полета на малой высоте, которая позволяет летательному аппарату максимально близко следовать над пролетаемой местностью, в частности, чтобы избежать обнаружения. Такая траектория полета на малой высоте, как правило, находится на заранее определенной высоте над землей, например на высоте 500 футов (примерно 150 метров).
Кроме того, такая траектория полета на малой высоте должна быть безопасной по отношению к местности, то есть ее формируют таким образом, чтобы риск столкновения летательного аппарата, следующего по этой траектории, с пролетаемой местностью (то есть непосредственно с землей или со строением или с элементом, находящимся на земле) был практически нулевым, или чтобы в любом случае вероятность такого столкновения была меньше заранее определенного очень малого значения, например, 10-9. Следовательно, если летательный аппарат направляется вдоль такой траектории полета на малой высоте, любое столкновение с пролетаемой местностью является в высшей степени маловероятным.
Известно, что во время полета на малой высоте в условиях ограниченной видимости могут возникнуть экстренные случаи (авария или, например, оперативная необходимость), в которых необходимо прервать полет на малой высоте и перевести летательный аппарат, окончательно или временно, на более значительную высоту, на которой летательный аппарат будет находиться в безопасности и не может столкнуться с местностью (земля, строение на земле). Эту высоту называют безопасной высотой полета. Из документа FR-04 05385 известен способ определения такой безопасной высоты.
Сам этап набора высоты, предназначенный для перевода летательного аппарата с траектории полета на малой высоте на безопасную высоту, не является абсолютно безопасным. Действительно, осуществление, например, набора высоты по прямой в условиях ограниченной видимости является непростой процедурой, так как полет на малой высоте оптимизирован для прохождения в низких точках долин максимально близко к пролетаемой местности и набор высоты вслепую по прямой линии является очень рискованным.
Кроме того, как правило, безопасная высота полета зависит от определенной географической зоны и, следовательно, является локально ограниченной. Это тем более верно, если эта зона является небольшой и зависит от траектории полета на малой высоте, как, например, в случае безопасной высоты, определяемой при помощи способа, описанного в вышеуказанной патентной заявке FR-04 05385. Таким образом, во время полета безопасная высота часто меняется.
Кроме того, в частности, в области военной авиации прекращение полета на малой высоте часто осуществляют экстренным образом, поэтому любая дополнительная задача, стоящая перед экипажем, например такая, как ручной выбор значения безопасной высоты, может представлять собой чрезмерную рабочую нагрузку в такой экстренной ситуации.
Задачей настоящего изобретения является устранение этих недостатков. Его объектом является способ помощи в пилотировании, который позволяет в условиях полной безопасности перевести летательный аппарат, летящий вдоль траектории полета на малой высоте (которая содержит боковую траекторию и вертикальную траекторию и которая безопасна по отношению к местности), на безопасную высоту.
В этой связи, согласно изобретению предлагаемый способ отличается тем, что во время полета летательного аппарата вдоль упомянутой траектории полета на малой высоте, когда летательный аппарат необходимо перевести на безопасную высоту, одновременно осуществляют следующие операции:
а) в горизонтальной плоскости продолжают вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте; и
б) в вертикальной плоскости летательный аппарат переводят в режим набора высоты, вызывающий набор высоты летательным аппаратом по наклону набора высоты, превышающему или равному максимальному наклону, существующему на вертикальной траектории упомянутой траектории полета на малой высоте.
Таким образом, благодаря изобретению, поскольку этап набора высоты до безопасной высоты осуществляют с наклоном набора высоты, который всегда превышает (или равен) максимальный наклон, существующий на траектории полета на малой высоте, летательный аппарат всегда находится над этой траекторией полета на малой высоте. Однако поскольку последнюю формируют таким образом, чтобы обезопасить ее по отношению к местности, то и траектория набора высоты, по которой следует летательный аппарат, тоже является безопасной по отношению к упомянутой местности, то есть по отношению к земле и к любым препятствиям, находящимся на земле. Следовательно, летательный аппарат может достичь упомянутой безопасной высоты в условиях полной безопасности.
Необходимо отметить, что траектория наборы высоты всегда находится над и на вертикали траектории полета на малой высоте в силу того, что в горизонтальной плоскости во время этого этапа набора высоты летательный аппарат всегда ведут по боковой траектории (упомянутой траектории полета на малой высоте), и что, по определению, траектория полета на малой высоте является безопасной в вертикальном направлении только, если летательный аппарат следует в горизонтальной плоскости по упомянутой боковой траектории.
Кроме того, предпочтительно осуществляют автоматическую синхронизацию заданного значения высоты, которую может использовать устройство автоматического пилотирования летательного аппарата, в момент, когда летательный аппарат больше не ведут вдоль траектории полета на малой высоте, по текущему значению безопасной высоты. Это позволяет экипажу не заниматься в экстренной ситуации управлением заданным значением высоты на уровне устройства автоматического пилотирования. Таким образом, исключается обычная рабочая нагрузка, которая состоит в считывании значения безопасной высоты и ее вводе в интерфейсное средство человек/машина устройства автоматического пилотирования, в частности, во время этапа набора высоты до безопасной высоты.
Вместе с тем, чтобы экипаж мог полностью оставаться хозяином этой ситуации, предпочтительно упомянутая автоматическая синхронизация может быть аннулирована путем ручного выбора частного значения безопасной высоты пилотом летательного аппарата.
Предпочтительно, в горизонтальной плоскости продолжают (по-прежнему) вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте, причем независимо от применяемого режима пилотирования, в частности во время этапа набора высоты до безопасной высоты, этапа выдерживания безопасной высоты или возможного снижения с безопасной высоты на траекторию полета на малой высоте. Этот отличительный признак имеет много преимуществ, что будет подробнее пояснено ниже, и позволяет, в частности, пилоту заранее предусматривать изменения значения безопасной высоты. Действительно, как правило, безопасная высота зависит от боковой траектории и, следовательно, меняется по мере продолжения полета. Поскольку, благодаря изобретению, летательный аппарат все время ведут вдоль этой боковой траектории, пилот летательного аппарата заранее знает по индикации на дисплее различные последовательные значения безопасной высоты вдоль этой боковой траектории. Таким образом, он может заранее предвидеть любое изменение значения.
Кроме того, предпочтительно, когда летательный аппарат ведут вдоль боковой траектории упомянутой траектории полета на малой высоте, причем независимо от вертикального наведения:
а) текущую высоту полета летательного аппарата сравнивают со вспомогательной высотой, которую определяют на основании траектории полета на малой высоте и которая представляет собой высоту упомянутой траектории полета в боковом положении, соответствующем текущему боковому положению летательного аппарата; и
б) если упомянутая текущая высота становится меньше или равной упомянутой вспомогательной высоте, летательный аппарат переводят на указанную вспомогательную высоту вдоль упомянутой траектории полета на малой высоте. Этот возврат к полету на малой высоте может быть временным или постоянным.
Таким образом, получают защиту, которая состоит в переводе летательного аппарата на полет на самой большой высоте между, с одной стороны, текущей высотой и, с другой стороны, вспомогательной высотой, связанной с траекторией полета на малой высоте, которая безопасна по отношению к местности, как было указано выше. Эта защита может повысить безопасность полета. Ее можно использовать во время любого порядка выполнения полета, когда летательный аппарат ведут вдоль боковой траектории упомянутой траектории полета на малой высоте, причем при любом вертикальном наведении. В частности, эту защиту можно применять во время этапа следования на безопасной высоте, содержащей выдерживание безопасной высоты или изменение безопасной высоты. Эту защиту можно также применять во время возврата к полету на малой высоте, чтобы выйти и удерживать траекторию полета на малой высоте.
Объектом настоящего изобретения является также система помощи в пилотировании летательного аппарата, содержащая:
- средства обработки данных для определения траектории полета на малой высоте,
- которая содержит боковую траекторию, определенную в горизонтальной плоскости, и вертикальную траекторию, определенную в вертикальной плоскости; и
- которая безопасна по отношению к местности;
- средства наведения, которые содержат, например, устройство автоматического пилотирования и/или пилотажный командный прибор, которые выполнены с возможностью вести летательный аппарат вдоль упомянутой траектории полета и которые выполнены также с возможностью его перевода на безопасную высоту; и
- средства включения и выбора заданного значения, позволяющие пилоту летательного аппарата управлять вручную, по меньшей мере, одним режимом набора высоты и выбирать задачу наведения (например, выход на требуемую конечную высоту).
Согласно изобретению упомянутая система помощи в пилотировании отличается тем, что упомянутые средства наведения выполнены таким образом, чтобы, когда они ведут летательный аппарат вдоль упомянутой траектории полета на малой высоте и когда при помощи упомянутых средств включения задают режим набора высоты:
в горизонтальной плоскости можно продолжать вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте, а
в вертикальной плоскости переводить летательный аппарат в режим набора высоты, вызывающий набор высоты летательным аппаратом по наклону набора высоты, который превышает или равен максимальному наклону, существующему на вертикальной траектории упомянутой траектории полета на малой высоте.
В частном варианте выполнения упомянутые средства наведения содержат устройство автоматического пилотирования, и упомянутая система помощи в пилотировании дополнительно содержит:
- первые средства для определения текущего значения безопасной высоты; и
- вторые средства для разрешения и для осуществления автоматической синхронизации заданного значения высоты, которое могут использовать упомянутые средства включения и выбора заданного значения по текущему значению безопасной высоты, определенному упомянутыми первыми средствами, причем в момент, когда летательный аппарат больше не ведут вдоль траектории полета на малой высоте.
Кроме того, предпочтительно, упомянутая система помощи в пилотировании содержит средство ручного выбора, позволяющее пилоту летательного аппарата аннулировать действие упомянутых вторых средств путем ручного выбора частного значения высоты.
Кроме того, предпочтительно упомянутые средства наведения выполнены таким образом, чтобы в горизонтальной плоскости всегда вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте.
Кроме того, в частном варианте выполнения упомянутая система помощи в пилотировании дополнительно содержит средство защиты, которое интегрировано в упомянутые средства наведения и которое выполнено таким образом, чтобы
сравнивать текущую высоту летательного аппарата со вспомогательной высотой, которую определяют на основании упомянутой траектории полета на малой высоте и которая представляет собой высоту упомянутой траектории полета в боковом положении, соответствующем текущему боковому положению летательного аппарата; и
если упомянутая текущая высота становится меньше или равной упомянутой вспомогательной высоте, пилотировать летательный аппарат на упомянутой вспомогательной высоте вдоль упомянутой траектории полета на малой высоте.
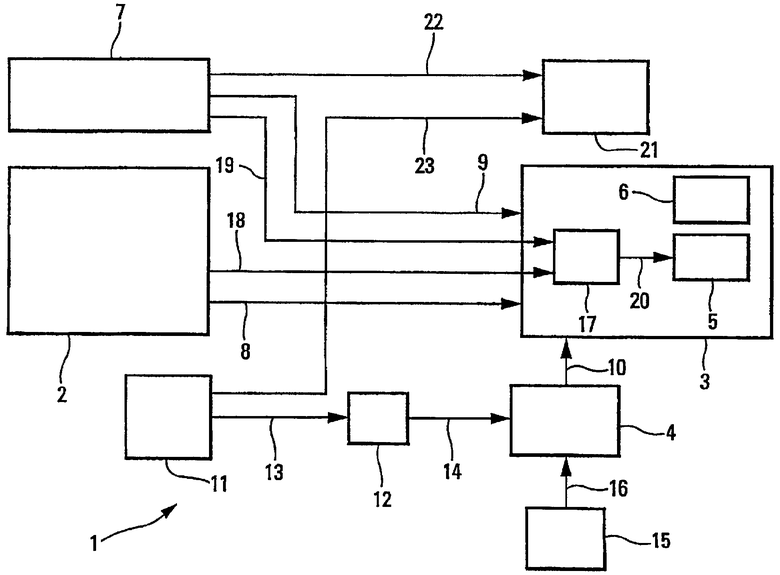
Настоящее изобретение будет более понятно при рассмотрении прилагаемого чертежа, на котором представлена блок-схема система помощи в пилотировании в соответствии с настоящим изобретением.
Система 1 в соответствии с настоящим изобретением, схематично показанная на чертеже, предназначена, чтобы помочь пилоту летательного аппарата, в частности военного транспортного самолета, привести упомянутый летательный аппарат, когда он летит вдоль траектории полета на малой высоте в условиях полной безопасности, на безопасную высоту, где он, по определению, не рискует столкнуться с пролетаемой местностью.
Для этого система 1 содержит
- обычные средства 2 обработки данных, в частности вычислительную систему самолетовождения, например, типа FMS (“Flight Management System”), которые предназначены для определения траектории полета на малой высоте, содержащей боковую траекторию, определенную в горизонтальной плоскости, и вертикальную траекторию, определенную в вертикальной плоскости. Эту траекторию полета на малой высоте определяют таким образом, чтобы позволить летательному аппарату следовать как можно ниже над пролетаемой местностью. Кроме того, она безопасна по отношению к упомянутой пролетаемой местности, то есть ее определяют таким образом, чтобы для летательного аппарата, следующего по этой траектории, опасность столкновения с пролетаемой местностью (то есть непосредственно с землей или со строением или элементом, находящимся на земле) была практически нулевой и чтобы в любом случае вероятность такого столкновения была меньше очень малого заранее определенного значения, например, 10-9;
- средства 3 наведения, выполненные с возможностью вести летательный аппарат вдоль упомянутой траектории полета на малой высоте, определенной упомянутыми средствами 2, и которые выполнены также с возможностью перевода летательного аппарата на безопасную высоту; и
- средства 4 включения и выбора заданного значения, которые позволяют пилоту летательного аппарата управлять вручную, по меньшей мере, одним частным режимом набора высоты и выбирать заданное требуемое значение высоты, когда летательный аппарат летит вдоль упомянутой траектории полета на малой высоте; и
- блок 7 обычных источников информации, позволяющий, в частности, определять данные, такие как географическое положение летательного аппарата, высоту его полета, измерения углов крена и тангажа и/или измерения скорости ускорения в различных осях механики.
В предпочтительном варианте выполнения упомянутые средства 3 наведения содержат следующие средства (на чертеже не показаны):
- средство вычисления, предназначенное для определения обычным путем заданных значений пилотирования на основании данных, принимаемых от упомянутых средств 2 через соединение 8 и от упомянутого блока 7 через соединение 9;
- по меньшей мере, одно средство помощи в пилотировании, например устройство 5 автоматического пилотирования или пилотажный командный прибор 6, которое на основании заданных значений пилотирования, принятых от упомянутого средства вычисления, определяет команды пилотирования летательного аппарата; и
- средства включения управляемых органов, таких, например, как рули (направления, высоты и т.д.) летательного аппарата, к которым применяют определенные таким образом команды пилотирования.
Кроме того, в частном варианте выполнения средства 4 включения и выбора заданного значения входят, например, в состав обычного интерфейса средств 3, с которыми они связаны через соединение 10, и, кроме выбора частного режима набора высоты, позволяют пилоту выбирать также один из множества разных режимов наведения летательного аппарата и, в частности, режим следования по траектории полета на малой высоте.
Согласно изобретению средства 3 наведения выполнены таким образом, чтобы, когда они ведут летательный аппарат вдоль упомянутой траектории полета на малой высоте и когда при помощи упомянутых средств 4 задают режим набора высоты:
- в горизонтальной плоскости можно было бы продолжать вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте; и
- в вертикальной плоскости перевести летательный аппарат в режим набора высоты, вызывающий набор высоты летательным аппаратом по наклону набора высоты, который превышает или равен максимальному наклону, существующему на вертикальной траектории упомянутой траектории полета на малой высоте. Этот максимальный наклон может, например, быть определен средствами 2.
Таким образом, благодаря системе 1 в соответствии с настоящим изобретением, этап набора высоты летательного аппарата до безопасной высоты происходит с наклоном набора высоты, который всегда превышает (или равен) максимальный наклон, существующий на траектории полета на малой высоте. Таким образом, во время этого набора высоты летательный аппарат всегда находится над упомянутой траекторией полета на малой высоте. Однако поскольку последняя определяется средствами 2 таким образом, чтобы быть безопасной по отношению к местности, траектория набора высоты, по которой следует летательный аппарат, тоже оказывается безопасной по отношению к упомянутой местности, то есть по отношению к земле и к любому находящемуся на земле препятствию. Следовательно, благодаря изобретению летательный аппарат может достичь упомянутой безопасной высоты в условиях полной безопасности.
Необходимо отметить, что траектория набора высоты всегда находится над вертикальной траекторией (траектории полета на малой высоте) за счет того, что в горизонтальной плоскости летательный аппарат все время ведут упомянутыми средствами 3 пилотирования (во время этого этапа набора высоты) по боковой траектории (упомянутой траектории полета на малой высоте), и того, что, по определению, траектория полета на малой высоте безопасна вертикально только, если в горизонтальной плоскости летательный аппарат следует по боковой траектории этой траектории полета.
Следует отметить, что при следовании по траектории полета на малой высоте средство помощи в пилотировании упомянутых средств 3 наведения (например, устройство 5 автоматического пилотирования или пилотажный командный прибор 6, связанный или не связанный с непоказанным средством, применяющим режим автоматического управления тягой) осуществляет отслеживание траектории полета на малой высоте, определенной средствами 2, в режиме, комбинирующем правила горизонтального и вертикального наведения. Если пилот действует, например, на селектор высоты панели управления, интегрированной в средства 4, устройство 5 автоматического пилотирования меняет правило вертикального наведения и управления тягой двигателей для решения следующих задач: повышения тяги двигателей до максимума и поддержания скорости заданного значения. В качестве другой возможности для пилота можно предусмотреть, чтобы он передвинул рычаги газа до упора. Таким образом, от двигателей требуют максимальную тягу, и режим и правило поддержания скорости позволяют поднять летательный аппарат с максимальной степенью подъема на текущей скорости.
В двух предыдущих примерах полученный наклон всегда превышает или равен наклону траектории полета на малой высоте, определенной средствами 2. В этих двух примерах средства 3 наведения поддерживают в горизонтальной плоскости автоматическое управление на боковой траектории, как было указано выше, что позволяет распространить на режим набора высоты защиту, обеспечиваемую для траектории полета на малой высоте по отношению к земле и возможным препятствиям.
В частном варианте выполнения упомянутая система 1 дополнительно содержит:
- обычные средства 11 для определения текущего значения безопасной высоты. Эти средства 11 могут определять это текущее значение безопасной высоты обычным путем, исходя из упомянутой боковой траектории; и
- обычные средства 12, соединенные через соединение 13 с упомянутыми средствами 11 и выполненные с возможностью осуществления автоматической синхронизации заданного значения высоты, которое может использоваться средствами 4 включения и выбора заданного значения (с которыми средства 12 соединены через соединение 14), по текущему значению безопасной высоты, определенному средствами 11, причем в момент, когда летательный аппарат больше не ведут вдоль траектории полета на малой высоте.
Этот частный вариант выполнения позволяет экипажу избежать экстренного управления заданным значением высоты на уровне средств 4 включения и выбора заданного значения. Таким образом исключается обычная рабочая нагрузка, состоящая в считывании значения безопасной высоты и ее выведении на обычное интерфейсное средство человек/машина средств 4 включения и выбора заданного значения, в частности, во время этапа набора высоты до безопасной высоты.
В частном варианте выполнения средства 11 интегрированы в средства 2, а средства 12 интегрированы в средства 3 наведения. В этом случае осуществляют автоматическую синхронизацию значения, используемого средствами 4 включения и выбора заданного значения, по значению, известному при помощи средств 2, например вычислительной системы самолетовождения летательного аппарата.
Эта автоматическая синхронизация подключается экипажем заранее во время процедуры входа в режим полета на малой высоте. Для этого отдельное средство подключения, не показанное на чертеже (например, нажимная кнопка или непостоянное положение переключателя, например, такого как кольцо вокруг обычного селектора высоты, которое позволяет выбрать шаг изменения), вызывает на уровне указателя высоты, выбранной средствами 4 включения и выбора заданного значения, замену обычно выбираемого цифрового значения на надпись или специальный значок, который указывает на подключение этой автоматической синхронизации. Начиная с момента этого подключения, любой выход из режима вертикального пилотирования на траектории полета на малой высоте приводит к появлению в специальном окне выбора высоты текущего значения безопасной высоты, что соответствует осуществлению вышеуказанной синхронизации. Отображаемое таким образом значение играет обычную роль выбора высоты, в частности, чтобы обусловить набор высоты и выход на эту высоту.
Кроме того, чтобы позволить экипажу оставаться хозяином этой ситуации, система 1, в соответствии с настоящим изобретением, дополнительно содержит средство 15 ручного выбора, которое соединено через соединение 16 со средствами 4 и которое позволяет пилоту летательного аппарата аннулировать действие упомянутых средств 12 путем ручного выбора частного значения безопасной высоты.
В частном варианте выполнения средство 15 ручного выбора интегрировано в средства 4.
Кроме того, в предпочтительном варианте выполнения средства 3 наведения выполнены также с возможностью постоянного наведения летательного аппарата вдоль боковой траектории упомянутой траектории полета на малой высоте, причем независимо от этапа полета (или применяемого режима наведения), будь то этап набора высоты до безопасной высоты, этап выдерживания такой безопасной высоты или возможное снижение с безопасной высоты на траекторию полета на малой высоте. В этом предпочтительном варианте выполнения пилот может заранее предусмотреть изменения значения безопасной высоты благодаря средствам 21 индикации профиля безопасной высоты вдоль траектории полета на малой высоте, при этом средства 21 индикации соединены с упомянутыми средствами 7 и 11 через соединения 22 и 23. Действительно, как правило, безопасная высота зависит от боковой траектории и меняется таким образом по мере осуществления полета. Поскольку в данном предпочтительном варианте выполнения летательный аппарат все время ведут вдоль этой боковой траектории, пилот летательного аппарата заранее знает различные последовательные значения безопасной высоты вдоль этой боковой траектории. Таким образом, он может без проблем заранее предусмотреть любое изменение значения.
Кроме того, система 1, в соответствии с настоящим изобретением, дополнительно содержит средство 17 защиты, которое интегрировано в средство 3 наведения, которое соединено через соединения 18, 19 и 20 соответственно со средствами 2, с упомянутыми средствами 7 и с упомянутым средством 5 автоматического пилотирования и которое выполнено с возможностью:
- сравнивать текущую высоту летательного аппарата, принятую от средств 7, со вспомогательной высотой, принятой от средств 2, которую определяют на основании траектории полета на малой высоте и которая представляет собой высоту упомянутой траектории полета на малой высоте, соответствующую текущему боковому положению летательного аппарата. Для этого упомянутое текущее боковое положение летательного аппарата определяют заранее обычным путем; и
- как только упомянутая текущая высота становится меньшей или равной упомянутой вспомогательной высоте, переводить полет летательного аппарата на упомянутую вспомогательную высоту вдоль упомянутой траектории полета на малой высоте.
Таким образом, средство 17 защиты обеспечивает защиту (по отношению к опасности столкновения с пролетаемой местностью), которая состоит в переводе летательного аппарата на самую большую высоту между, с одной стороны, текущей высотой и, с другой стороны, вспомогательной высотой, связанной с траекторией полета на малой высоте. Поскольку эта вспомогательная высота, по определению, безопасна по отношению к местности, как было указано выше, полученная, таким образом, защита повышает безопасность полета. Эта защита может применяться, когда летательный аппарат ведут вдоль боковой траектории упомянутой траектории полета на малой высоте, причем независимо от вертикального наведения. В частности, эту защиту можно применять во время этапа следования на безопасной высоте, содержащего выдерживание безопасной высоты или изменение безопасной высоты. Эту защиту можно также применять во время возврата к полету на малой высоте, чтобы выйти и выдерживать траекторию полета на малой высоте.
Следует отметить, что после активации средства 17 защиты возможны два варианта применения, а именно
- активация защиты приводит к возобновлению выдерживания траектории полета на малой высоте. В этом случае интерфейс человек/машина сигнализирует об этом возобновлении. Этот вариант выбирает экипаж, когда защита активирована, например, путем нажатия на нажимную кнопку подключения полета на малой высоте;
- защита является реверсивной. О ней сообщается на уровне интерфейса человек/машина в качестве временной. В этом случае, как только потребность в защите отпадает, первоначальное правило наведения опять становится активным.
Система 1 помощи в пилотировании, в соответствии с настоящим изобретением, во время полета на малой высоте, при котором траектория полета в трех измерениях определяется вычислительной системой (средства 2) самолетовождения, позволяет обеспечить экипажу летательного аппарата поддержку средств 3 наведения, чтобы, в случае необходимости, занять безопасную высоту и отслеживать полет на этой высоте, и, в случае необходимости, снизиться на малую высоту, сохраняя при этом на данных частных этапах полета уровень безопасности, существующий для того, чтобы обезопасить полет на малой высоте.
Изобретения относятся к области приборостроения и могут найти применение в системах автоматического управления летательными аппаратами (ЛА). Технический результат - расширение функциональных возможностей. Для достижения данного результата система содержит средства наведения, которые выполнены таким образом, что когда ЛА летит вдоль траектории полета на малой высоте и когда подается команда на набор высоты, то система продолжает вести ЛА в горизонтальной плоскости вдоль боковой траектории полета на малой высоте. При этом в вертикальной плоскости система переводит ЛА в режим набора высоты по наклону набора высоты, который превышает или равен максимальному наклону на траектории полета. 4 н. и 8 з.п. ф-лы, 1 ил.
1. Способ помощи в пилотировании летательного аппарата, который выполнен с возможностью выполнения полета вдоль траектории полета на малой высоте, при этом упомянутая траектория полета содержит боковую траекторию и вертикальную траекторию и безопасна относительно местности, и который выполнен с возможностью его перевода на безопасную высоту,
в котором, во время полета летательного аппарата, вдоль упомянутой траектории полета на малой высоте, когда летательный аппарат необходимо перевести на безопасную высоту, одновременно осуществляют следующие операции:
а) в горизонтальной плоскости продолжают вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте; и
б) в вертикальной плоскости летательный аппарат переводят в режим набора высоты, вызывающий набор высоты летательным аппаратом по наклону набора высоты, превышающему или равному максимальному наклону, существующему на вертикальной траектории упомянутой траектории полета на малой высоте.
2. Способ по п.1, в котором как только летательный аппарат больше не ведут вдоль траектории полета на малой высоте осуществляют автоматическую синхронизацию заданного значения высоты, которую может использовать устройство автоматического пилотирования летательного аппарата, по текущему значению безопасной высоты.
3. Способ по п.2, в котором упомянутая автоматическая синхронизация может быть аннулирована путем ручного выбора частного значения безопасной высоты пилотом летательного аппарата.
4. Способ по п.1, в котором в горизонтальной плоскости продолжают все время вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте, причем независимо от применяемого режима пилотирования.
5. Способ по п.4, в котором когда летательный аппарат ведут вдоль боковой траектории упомянутой траектории полета на малой высоте, причем независимо от вертикального наведения:
а) текущую высоту полета летательного аппарата сравнивают со вспомогательной высотой, которую определяют на основании траектории полета на малой высоте и которая представляет собой высоту упомянутой траектории полета в боковом положении, соответствующем текущему боковому положению летательного аппарата; и
б) если упомянутая текущая высота становится меньше или равной упомянутой вспомогательной высоте, летательный аппарат пилотируют на указанной вспомогательной высоте вдоль упомянутой траектории полета на малой высоте.
6. Система для помощи в пилотировании летательного аппарата, при этом упомянутая система (1) содержит:
средства (2) обработки данных для определения траектории полета на малой высоте,
которая содержит боковую траекторию, определенную в горизонтальной плоскости, и вертикальную траекторию, определенную в вертикальной плоскости, и
которая безопасна относительно местности;
средства (3) наведения, которые выполнены с возможностью вести летательный аппарат вдоль упомянутой траектории полета и с возможностью его перевода на безопасную высоту; и
средства (4) включения и выбора заданного значения, позволяющие пилоту летательного аппарата управлять вручную, по меньшей мере, одним режимом набора высоты,
в которой упомянутые средства (3) наведения выполнены таким образом, чтобы, когда они ведут летательный аппарат вдоль упомянутой траектории полета на малой высоте и когда при помощи упомянутых средств (4) включения и выбора заданного значения управляют режимом набора высоты:
в горизонтальной плоскости продолжать вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте; и
в вертикальной плоскости переводить летательный аппарат в режим набора высоты, вызывающий набор высоты летательным аппаратом по наклону набора высоты, который превышает или равен максимальному наклону, существующему на вертикальной траектории упомянутой траектории полета на малой высоте.
7. Система по п.6, в которой упомянутые средства (3) наведения содержат устройство (5) автоматического пилотирования, управляемое через упомянутые средства (4) включения и выбора заданного значения, и упомянутая система (1) дополнительно содержит:
первые средства (11) для определения текущего значения безопасной высоты; и
вторые средства (12) для осуществления автоматической синхронизации заданного значения высоты, которое могут использовать упомянутые средства (4) включения и выбора заданного значения по текущему значению безопасной высоты, определенному упомянутыми первыми средствами (11), причем в момент, когда летательный аппарат больше не ведут вдоль траектории полета на малой высоте.
8. Система по п.7, которая дополнительно содержит средство (15) ручного выбора, позволяющее пилоту летательного аппарата аннулировать действие упомянутых вторых средств (12) путем ручного выбора частного значения высоты.
9. Система по п.6, в которой упомянутые средства (3) наведения выполнены таким образом, чтобы в горизонтальной плоскости всегда вести летательный аппарат вдоль боковой траектории упомянутой траектории полета на малой высоте.
10. Система по п.9, которая дополнительно содержит средство (17) защиты, которое интегрировано в упомянутые средства (3) наведения и которое выполнено таким образом, чтобы:
сравнивать текущую высоту летательного аппарата со вспомогательной высотой, которую определяют на основании упомянутой траектории полета на малой высоте и которая представляет собой высоту упомянутой траектории полета в боковом положении, соответствующем текущему боковому положению летательного аппарата; и
если упомянутая текущая высота становится меньше или равной упомянутой вспомогательной высоте, пилотировать летательный аппарат на упомянутой вспомогательной высоте вдоль упомянутой траектории полета на малой высоте.
11. Летательный аппарат, который содержит систему (1), выполненную с возможностью применения способа по п.1.
12. Летательный аппарат, который содержит систему (1) по п.6.
| FR 0002870520 B1, 03.08.2007 | |||
| FR 2870520 A1, 11.25.2005 | |||
| US 2004111192 A1, 10.06.2004 | |||
| FR 2864270 A1, 24.06.2005 | |||
| FR 2864269 A1, 24.06.2005 | |||
| US 6255965 A, 03.07.2001. |

