Изобретение относится к испытательной технике и может быть использовано для определения эффективной тяги двигателей самолета, т.е. равнодействующей сил давления и трения, приложенных ко всем поверхностям силовой установки как со стороны газового потока, протекающего внутри двигателя, так и со стороны потока воздуха, обтекающего силовую установку снаружи. Значение эффективной тяги представляет собой долю тяги изолированного двигателя, непосредственно используемую для движения ЛА. Актуальной задачей является повышение точности, достоверности и оперативности определения эффективной тяги двигателей самолетов для различных режимов полета, сокращение сроков испытаний и их стоимости.
Известен газодинамический способ определения тяги газотурбинных двигателей (ГТД), включающий измерение параметров газовой струи, площади сопла и вычисление по ним тяги двигателя. Различные модификации способа представлены в, частности, в патентах США №2524749, МПК G01L 5/133, опубликованном 10.10.1950 г., и №2981098, МПК G01L 5/13, опубликованном 25.04.1961 г.
Известны также аэродинамические методы измерения тяги реактивных двигателей, использующие датчики динамического напора выхлопной струи, позволяющие непосредственно измерять импульс реактивной струи или полный импульс в точке сечения реактивной струи. Такой способ описан, в частности, в патенте США №3543574, МПК G01L 5/13, опубликованном 01.12.1970 г., выбранном нами в качестве прототипа.
Эти способы требуют препарирования и усложнения конструкции двигателя и обладают значительной погрешностью в определении тяги. Общим недостатком указанных способов является то, что вводимые в реактивную струю зонды, датчики не дают однозначных результатов в околозвуковых и трансзвуковых диапазонах скоростей реактивной струи в связи с нелинейностью коэффициентов сопротивления, что приводит к снижению точности определения тяги.
Целью изобретения является создание способа определения эффективной тяги двигателей самолета на различных режимах эксплуатации, позволяющего повысить точность измерения тяги без усложнения конструкции и процесса эксплуатации двигателей, при уменьшении объема трудозатрат.
Поставленная цель достигается за счет того, что согласно заявленному способу определения тяги двигателей самолета, основанному на измерении скоростного напора воздушного потока, дополнительно измеряют угол атаки самолета, перегрузку вдоль продольной оси самолета и на основании полученных данных, учитывая константы, характеризующие конструкцию и аэродинамику испытуемого самолета, такие как эквивалентная площадь крыла самолета S, угол отклонения оси двигателя от продольной оси самолета φдв, выходной импульс двигателя Ρвых0, ускорение свободного падения g, масса самолета m, определяют эффективную тягу двигателя методом наименьших квадратов, причем для определения эффективной тяги двигателя выполняют последовательные маневры пикирования и кабрирования с постоянной тягой во всем эксплуатационном диапазоне высот и скоростей полета.
Предлагаемый способ предназначен для определения эффективной тяги двигателей по данным летных испытаний. Главная особенность предлагаемого подхода заключается в том, что для получения оценок тяги и сопротивления используются только измерения таких основных полетных параметров, как скоростной напор набегающего потока воздуха, продольная перегрузка и угол атаки самолета. Измерения параметров двигателя (давление, температура в заданных сечениях) не требуются, газодинамическая модель двигателя в алгоритме не используется.
Искомая величина эффективной тяги двигателей получается в результате решения задачи параметрической идентификации непосредственно в полете. Наблюдаемость обеспечивается за счет выполнения специального тестового маневра, обеспечивающего малые приращения скорости полета при постоянном режиме работы двигателя.
Суть работы способа излагается ниже.
Рассмотрим следующую модель объекта. Сила аэродинамического сопротивления направлена вдоль оси Охе
Хе=qSCxe,
где  - скоростной напор, Па;
- скоростной напор, Па;
S - эквивалентная площадь крыла, м2;
ρH - плотность воздуха на высоте полета H, кг/м3;
Vист - истинная воздушная скорость.
Аэродинамические коэффициенты в связанной системе координат определяются выражением
 ,
,
где α - угол атаки, градус.
Значения аэродинамических коэффициентов и геометрических параметров зависят от типа ЛА.
Учитывая, что входной импульс Рвх направлен вдоль связанной оси, а выходной Рвых - вдоль оси двигателя, которая отклонена относительно связанной оси на угол установки двигателя φдв, проекция аэродинамических сил, входного и выходного импульсов на продольную ось определяется выражением
XΣe=qScxe-Рвх+Рвыхcos(φдв+α)
Проекция перегрузки на ось X
 ,
,
Окончательные выражения для проекции перегрузки на продольную ось получим, подставляя разложения аэродинамических коэффициентов:

Учитывая, что cos(φдв+α)=cosφдвcosα-sinφдв-sinα и раскладывая cosα и sinα в ряд относительно α0=0, получим  ; sinα≈α. Тогда для малых углов атаки
; sinα≈α. Тогда для малых углов атаки

Последние два слагаемых целесообразно учесть в явном виде, используя априорную информацию о Рвх. Объединим составляющие тяги
Рэф=-Рвх+Рвыхcosφдв.
Тогда выражение (1) примет следующий вид:

где 
слагаемое, зависящее от априорного значения выходного импульса Рвых0.
Расчетами установлено, что если погрешность априорного значения не превышает 10%, ее влияние на погрешность остальных параметров не превышает 0,25%.
Вектор определяемых параметров содержит четыре параметра
 .
.
Идентификация выполняется по методу наименьших квадратов (МНК) на основе уравнения (2).
Учитывая, что бортовые измерения выполняются в дискретные моменты времени,

где N - число измерений на участке идентификации.
Для нахождения оценок по МНК формируем вектор Y размерности N и матрицу X размерности N×N:

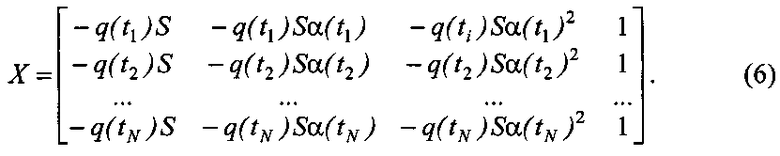
Тогда вектор определяемых параметров находим в соответствии с выражением

Анализ выражений (4)-(7) показывает, что для обеспечения наблюдаемости необходимо изменять скорость полета, однако изменения относительно установившегося значения должны быть малы (точное значение зависит от типа двигателя и режима полета), чтобы выполнялось условие постоянства силы тяги двигателей на интервале обработки. Скорость изменяется при постоянном режиме работы двигателей за счет последовательного выполнения маневров пикирования и кабрирования с малыми углами наклона траектории. Изменения угла атаки при переходных процессах достаточны для обеспечения наблюдаемости всей системы.
В соответствии с общим подходом к оцениванию характеристик самолетов в летных испытаниях указанный маневр необходимо выполнить во всем эксплуатационном диапазоне высот и скоростей полета.
На высоте Н=3000 м и скорости полета, соответствующей М=0,4 (Vпр=410 км/час), необходимо сбалансировать самолет в прямолинейном горизонтальном полете (ПГП) с постоянной скоростью, запомнить при этом угол атаки α0. Выполнить движение РУС по тангажу "от себя" и "на себя" длительностью 2…2,5 с так, чтобы приращения угла атаки составили ±(1…2) градуса. Восстановить ПГП на той же высоте и с тем же числом М и углом атаки. Не изменяя режим работы двигателей, перевести самолет в пикирование с малым приращением угла тангажа так, чтобы приборная скорость полета постепенно увеличилась на 10 км/час до 420 км/час (число M увеличилось на 0,01 до М=0,41). Затем перевести самолет в режим прямолинейного набора высоты так, чтобы скорость с тем же темпом уменьшилась на 10 км/час от исходного значения, то есть до 400 км/час (число M уменьшилось на 0,01 от исходного до М=0,39). Далее снова перевести самолет в пикирование и увеличить скорость с тем же темпом до исходного значения 410 км/час (М=0,4). Восстановить ПГП с М=0,4 (Vпр=410 км/час) на исходной высоте в пределах Н0±250 м. Выполнить движение РУС по тангажу "от себя" и "на себя" длительностью 2…2,5 с так, чтобы приращения угла атаки составили ±(1…2) градуса.
При выполнении режима угол атаки выдерживать в диапазоне α0±(1…2)°, при переводах в пикирование и кабрирование допускается превышение этого ограничения.
Таким образом, требуется при постоянном режиме работы двигателя выполнить плавное колебание по приборной скорости ±10 км/час (dM=±0,01) за счет малых изменений угла наклона траектории. Повторить режим.
Выполнить аналогичный режим, создавая приращения по приборной скорости ±15 км/час (dM=±0,015). Повторить режим.
Техническим результатом является возможность определения эффективной тяги двигателей самолета, используя только измеренные значения параметров полета самолета и априорные значения констант, характеризующих параметры летательного аппарата. Заявляемый способ может быть использован на всех типах ЛА, независимо от типа используемого двигателя. Значения констант определяются при продувках планера самолета в аэродинамических трубах и путем взвешиваний и юстировки при изготовлении самолета.
Исследования методом математического моделирования показали работоспособность и высокую точность предлагаемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2582492C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЯГИ ПРИ ИЗМЕНЕНИИ РЕЖИМА РАБОТЫ ДВИГАТЕЛЕЙ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601367C1 |
| СПОСОБ УПРАВЛЕНИЯ АВИАЦИОННО-КОСМИЧЕСКОЙ СИСТЕМОЙ ДЛЯ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА | 1999 |
|
RU2160214C1 |
| СПОСОБ ВЗЛЕТА САМОЛЕТА | 1998 |
|
RU2134217C1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| СПОСОБ СТАРТА РАКЕТЫ С САМОЛЕТА ДЛЯ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА НА ОРБИТУ (ВАРИАНТЫ) | 2004 |
|
RU2289084C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2241642C2 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| СПОСОБ СТАРТА РАКЕТЫ С САМОЛЕТА ДЛЯ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА НА ОРБИТУ | 2008 |
|
RU2394201C2 |
Изобретение относится к испытательной технике и может быть использовано для определения эффективной тяги двигателей самолета. Способ основан на измерении скоростного напора воздушного потока, включает в себя измерение угла атаки самолета и перегрузку вдоль продольной оси самолета. На основании полученных данных, учитывая константы, характеризующие конструкцию и аэродинамику испытуемого самолета, такие как эквивалентная площадь крыла самолета, угол отклонения оси двигателя от продольной оси самолета, выходной импульс двигателя, ускорение свободного падения, масса самолета, определяют эффективную тягу двигателя методом наименьших квадратов, причем для определения эффективной тяги двигателей выполняют последовательные маневры пикирования и кабрирования с постоянной тягой, во всем эксплуатационном диапазоне высот и скоростей полета. Технический результат заключается в повышении точности измерения тяги.
Способ определения тяги двигателей самолета, основанный на измерении скоростного напора воздушного потока, отличающийся тем, что дополнительно измеряют угол атаки самолета, перегрузку вдоль продольной оси самолета и на основании полученных данных, учитывая константы, характеризующие конструкцию и аэродинамику испытуемого самолета, такие как эквивалентная площадь крыла самолета S, угол отклонения оси двигателя от продольной оси самолета φдв, выходной импульс двигателя Рвых0, ускорение свободного падения g, масса самолета m, определяют эффективную тягу двигателя методом наименьших квадратов, причем для определения эффективной тяги двигателя выполняют последовательные маневры пикирования и кабрирования с постоянной тягой во всем эксплуатационном диапазоне высот и скоростей полета.
| US 3543574 A 01.12.1970 | |||
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОЦЕНКИ В ПОЛЕТЕ СУММАРНОЙ ТЯГИ ДВИГАТЕЛЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2364846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛЫ ТЯГИ ГИПЕРЗВУКОВОГО ПРЯМОТОЧНОГО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ ЕГО НА ГИПЕРЗВУКОВОЙ ЛЕТАЮЩЕЙ ЛАБОРАТОРИИ | 2006 |
|
RU2324156C9 |

