Изобретение относится к электротехнике и может быть использовано в системах автоматического управления дискретным электроприводом.
Известен шаговый двигатель, включающий в себя ротор с равномерно распределенными по окружности зубцами и зубчатый статор [1].
Известен шаговый двигатель, включающий в себя полый ротор, состоящий из ферромагнитных зубцов и диамагнитных участков, и статор, состоящий из разделенных диамагнитными участками ферромагнитных секций с обмотками и полюсами, расположенными снаружи и внутри ротора [2].
Известен также шаговый двигатель, включающий в себя вал ротора, на котором укреплен чашеобразный роторный элемент, снабженный зубцами, расположенными аксиально. Магнитопровод статора содержит внутренний и внешний полюсы, между каждой парой полюсов статора установлена диамагнитная прокладка [3].
Недостатком указанных двигателей является невозможность регулирования величины механического шага, вследствие чего снижаются функциональные возможности электродвигателя.
Известен также шаговый двигатель, включающий в себя реактивный ротор с зубцами, которые выполнены со скосом, статор с открытыми пазами и с сосредоточенными обмотками управления [4].
Недостатком данного двигателя является невозможность отработки величины регулируемого шага ± в сторону увеличения шага больше единицы при подаче единичного импульса управления, вследствие чего снижаются функциональные возможности электродвигателя. Отработка шага больше единицы потребует от схемы управления подачи второго импульса, что ведет к усложнению схемы управления из-за необходимости изменений числа управляющих импульсов в системе.
Настоящее изобретение позволяет получить регулируемую величину отрабатываемого шага как в сторону увеличения шага в пределах до двукратного, так и в сторону уменьшения шага.
Новый технический эффект заключается в том, что расширяется возможность регулирования величины шага без усложнения функциональной схемы управления.
Новый технический эффект достигается тем, что в зазоре между статором и ротором размещен на направляющих стержнях подвижный в продольном направлении цилиндр, длина которого равна половине длины пакета статора, выполненный из чередующихся ферромагнитных и диамагнитных участков (алюминий), причем внешняя поверхность ферромагнитных участков (зубцов) совпадает с зубцами статора, а внутренняя имеет скос, совпадающий со скосом зубцов ротора.
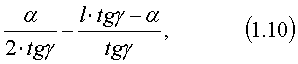
На фиг.1 показан общий вид шагового электродвигателя в сечении. На фиг.2 показана часть подвижного внутреннего цилиндра с ферромагнитными и диамагнитными участками. На фиг.3 показан подвижный цилиндр, состоящий из чередующихся ферромагнитных и диамагнитных материалов. Шаговый электродвигатель состоит из реактивного ротора 1, зубцы которого выполнены со скосом γ, статора 3 с открытыми пазами 4 и с сосредоточенными обмотками управления 5. В зазоре между ротором 1 и статором 3 помещен на направляющих 6 подвижный в продольном направлении цилиндр 7, длиной равный половине длины статора в аксиальном направлении. Цилиндр 7 выполнен из чередующихся ферромагнитных 8 и диамагнитных 9 участков, у которых внешняя поверхность совпадает с зубцами 10 статора 3, а внутренняя имеет скос, совпадающий со скосом γ зубцов 2 ротора 1. Подвижный цилиндр изображен на фиг.2.
Шаговый электродвигатель работает следующим образом. В нормальном положении подвижный цилиндр 7 расположен над серединой ротора 1 (фиг.3, позиция В) и шаг отработки двигателя равен механическому шагу α, значение которого зависит от положения подвижного кольца в зависимости от расположения по отношению к оси двигателя.
Для уменьшения последующего шага необходимо переместить подвижный цилиндр 7 в направлении крайнего положения С. В этом случае расстояние между наплывающим зубцом 2 ротора 1 и нижней поверхностью активного участка 8 цилиндра 7 уменьшается до α2 (α2<α, считаем, что ротор движется справа налево), что вызывает уменьшение механического шага. Так как ширина магнитных участков 8 цилиндра 7 равна ширине зубцов 2 ротора 1 и ширине зубцов τc статора 3, а скос зубцов равен углу скоса γ нижней поверхности ферромагнитных участков 8 и сопротивление магнитной цепи для потока возбуждения будет определяться положением ротора 1 и электромеханический момент не будет зависеть от перемещения цилиндра 7. Чтобы увеличить последующий шаг, необходимо переместить подвижный цилиндр 7 в направлении крайнего положения А. В этом случае расстояние между наплывающим зубцом 2 ротора 1 и нижней поверхностью активного участка 8 цилиндра 7 увеличится до α1 (α2<α<α1), что вызовет увеличение последующего механического шага.
В зависимости от технологического процесса в дискретных электроприводах могут использоваться шаговые двигатели с различной величиной шага, с различным отношением длины пакета статора 3 и подвижного цилиндра 7, что дает возможность регулирования величины шага выходного вала ротора 1 в достаточно широких пределах и с высокой степенью точности. При необходимости к валу двигателя может быть подключен редуктор. Тогда при переходе подвижного цилиндра в один из концов статора исчерпывается возможность регулирования шага, в этот момент можно подключить сменный редуктор с передаточным числом, равным единице, и изменить направление вращения самого двигателя, т.е. шаг выходного вала ротора 1 остается прежним, но появится возможность регулировать шаг в ту же сторону и далее. В нормальном положении подвижной цилиндр должен находиться над серединой ротора. Из этого положения (положение В) перемещение подвижного цилиндра в крайние положения А и С обеспечивает последующий шаг, равный 0,5α или 1,5α соответственно - наиболее оптимальный случай соотношения длин подвижного цилиндра 7 и статора 3 и угла скоса зубцов 2 ротора 1.
Условия регулирования величины шага ±α определяет необходимую аксиальную длину подвижного цилиндра Z:

где l - длина ротора, мм;
γ - угол скоса зубцов ротора и нижней поверхности магнитных участков подвижного цилиндра, град.
Для случая, когда скос зубцов ротора равен α:
и подставив в (1.2), получим:
Таким образом 
является вторым граничным условием длины подвижного цилиндра.
Например, при  подстановка в (1.1) дает:
подстановка в (1.1) дает:
γ=arctg =30,97≈31°,
=30,97≈31°,
Из условия технологичности изготовления ферромагнитных участков подвижного цилиндра, а именно, когда скос равен α, находим:
Отсюда:
Подставляя в (1.8), получим:
Откуда:
или
γ=arctg =41,98≈42°,
=41,98≈42°,
В технических системах наиболее часто появляется необходимость в регулировании величины механического шага от номинального значения до нуля, а отработку увеличенного шага можно реализовать с отработкой двух механических шагов со снижением величины второго из них в меньшую сторону. При сохранении той же длины подвижного цилиндра 7 регулирование длины механического шага от номинального значения до нуля достигается следующим образом - подвижный цилиндр устанавливается в одно из крайних положений, а перемещение его в другое положение позволяет регулируемую величину механического шага довести до нуля. При необходимости увеличения величины механического шага больше зубцового шага (или больше одного шага) возможно отработкой двух шагов, при этом перемещением подвижного цилиндра достигается величина механического шага αном<αш<2αном.
Источники информации
1. А.С. 207489 РФ, МКИ Н02К 37/00. Шаговый двигатель / Лузин М.И., опубл. 27.02.97, - бюл. №6.
2. A.C. 1141528 СССР, МКИ Н02К 37/00. Шаговый электродвигатель / Бондаренко В.И., опубл. 23.02.85, - бюл. №7.
3. А.С. 453855, МКИ Н02К 37/00. Электрический шаговый двигатель / Сеюемон Инаба., опубл. 15.12.74, - бюл. №46.
4. А.С. 2246787 РФ, МКИ Н02К 37/20. Шаговый двигатель / Муфазалов Ф.Ш., Степанов Д.Н., опубл. 27.02.97, бюл. №6 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2246787C2 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1991 |
|
RU2031523C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321144C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366064C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2008 |
|
RU2375806C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2008 |
|
RU2366066C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ С ПОСТОЯННЫМИ МАГНИТАМИ | 2008 |
|
RU2362259C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2005 |
|
RU2301488C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |
Изобретение относится к электротехнике и может быть использовано в системах автоматического управления дискретным электроприводом. Шаговый электродвигатель состоит из реактивного ротора со скошенными пазами, статора с открытыми пазами, в которых уложены сосредоточенные обмотки управления. В зазоре между статором и ротором установлен подвижный в осевом направлении цилиндр, длина которого равна половине длины активной части статора, что обеспечивает регулирование величины шага в сторону увеличения в пределах до двукратной величины, так и в сторону уменьшения без усложнения схемы управления. Цилиндр выполнен из чередующихся ферромагнитных и диамагнитных участков. Внешняя поверхность ферромагнитных и диамагнитных участков совпадает с зубцами статора, а внутренняя имеет скос, совпадающий со скосом зубцов ротора. Технический результат состоит в расширении функциональных возможностей шагового двигателя путем обеспечения регулирования величины его механического шага. 3 ил.
Шаговый электродвигатель, включающий в себя реактивный ротор с зубцами, которые выполнены со скосом, статор с открытыми пазами и с сосредоточенными обмотками управления, отличающийся тем, что в зазоре между статором и ротором размещен на направляющих стержнях подвижный в продольном направлении цилиндр, длина которого равна половине длины пакета статора, выполненный из чередующихся ферромагнитных и диамагнитных участков (алюминий), причем внешняя поверхность ферромагнитных участков (зубцов) совпадает с зубцами статора, а внутренняя имеет скос, совпадающий со скосом зубцов ротора.
| ШАГОВЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2246787C2 |
| Шаговый электродвигатель | 1976 |
|
SU644016A1 |
| Шаговый электродвигатель | 1982 |
|
SU1141528A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2074489C1 |
| ГОРИЗОНТАЛЬНЫЙ ОТСТОЙНИК | 1999 |
|
RU2149673C1 |

