Изобретение относится к спутниковой навигации и может использоваться для контроля целостности навигационного поля глобальной навигационной спутниковой системы (ГНСС). Под контролем целостности навигационного поля ГНСС понимают способность системы обеспечить своевременное предупреждение о тех моментах времени, когда система в целом или отдельные космические аппараты (КА) системы не должны использоваться для навигационных определений [1, с.440].
Известен способ контроля целостности навигационного поля ГНСС, при котором на космических аппаратах ГНСС осуществляется непрерывный автономный контроль (самоконтроль) функционирования основных бортовых систем [1, с.337]. Способ автономного контроля предусматривает, что при обнаружении непарируемых нарушений нормального функционирования основных бортовых систем, влияющих на качество излучаемого КА навигационного сигнала и достоверность передаваемого навигационного сообщения, на КА формируется признак его неисправности, который передается потребителю системы в составе оперативной информации навигационного сообщения [1, с.337]. Недостатком этого способа контроля является его неполнота: средства самоконтроля рассчитаны на обнаружение не всех возможных нарушений в работе бортовых систем; неисправности самих средств контроля не обнаруживаются и не сопровождаются передачей соответствующего сообщения (признака) потребителям; искажение эфемерид не может быть обнаружено на самом космическом аппарате [1, с.338].
Известен способ контроля целостности навигационного поля ГНСС, при котором качество навигационного поля анализируется наземной контрольно-корректирующей станцией (ККС), имеющей в составе опорные измерительные станции с известными координатами и передающие средства [1, с.355-359]. При этом на опорных измерительных станциях принимают навигационные сообщения видимых КА ГНСС. На ККС рассчитывают и передают потребителям дифференциальные поправки для корректной обработки навигационных сообщений при навигационных определениях.
Недостатками описанного способа являются:
- локальная зона обслуживания потребителей, так как дальность обслуживания одной ККС составляет около 300 км [1, с.357];
- влияние ионосферы на распространение радиосигнала навигационного сообщения, принятого ККС, способное привести к его искажению сообщения и в результате некорректному результату анализа качества функционирования КА ГНСС;
- затраты ресурсов на создание и эксплуатацию ККС.
Известен способ контроля целостности навигационного поля ГНСС, при котором качество навигационного поля контролируется специальной аппаратурой, входящей в состав наземной подсистемы контроля и управления, - аппаратурой контроля поля (АКП) [1, с.338]. После обнаружения нарушения функционирования бортовой аппаратуры некоторого КА ГНСС аппаратура контроля поля обеспечивает формирование признака неисправности этого КА и передачу признака в альманах всех КА ГНСС.
Недостатками такого способа являются:
- низкая оперативность оповещения потребителей при обнаружении нарушения функционирования КА ГНСС, так как согласно требованиям от момента обнаружения нарушения до включения признака неисправности в состав навигационного сообщения допускается значительная продолжительность времени (включение признака в альманах всех КА системы должно быть обеспечено не позднее, чем через 16 часов [1, с.338]);
- влияние ионосферы на распространение радиосигнала навигационного сообщения, способное привести к его искажению и в результате некорректному результату анализа качества функционирования КА ГНСС;
- затраты ресурсов на создание и эксплуатацию АКП.
Известен способ-прототип контроля целостности навигационного поля ГНСС, при котором анализ качества навигационных сигналов осуществляется потребителем путем использования избыточной навигационной информации, получаемой в навигационной аппаратуре потребителей (НАП) от различных видимых КА ГНСС [1, с.339]. Так, принимая сигналы более чем от четырех КА ГНСС, находящихся в зоне радиовидимости НАП, выполняют навигационные определения по навигационным сообщениям только четырех КА. Выбирают различные комбинации четырех КА из всех видимых КА, получают несколько наборов координат потребителя. Например, приняв сигналы от пяти КА, можно получить пять наборов координат потребителя. Проводят анализ полученных наборов и подтверждают корректность принятых навигационных сообщений или выявляют КА ГНСС, навигационные сообщения которого не должны использоваться для навигационных определений [1, с.339].
В соответствии с последовательностью действий описанного способа, основанного на обработке избыточной навигационной информации, расчет координат потребителя может осуществляться не только по четырем принятым навигационным сообщениям, но с использованием большего количества принятых сообщений. При этом количество навигационных сообщений, используемых для расчета одного набора координат потребителя, должно быть меньше количества принятых сообщений. По существу способ-прототип предусматривает обработку избыточной навигационной информации, при этом осуществляют прием N навигационных сообщений КА ГНСС, находящихся в зоне радиовидимости, выполняют расчет координат, используя K=4,…, N-1 сообщений (т.е. с использованием части принятых навигационных сообщений), получают несколько наборов координат потребителей, выявляют космический аппарат, навигационные сообщения которого не должны использоваться для навигационных определений.
Существенным достоинством способа-прототипа является возможность оперативного выявления КА ГНСС, передающего некорректные навигационные сообщения, которые не должны использоваться для навигационных определений. Однако способ-прототип не может применяться при отсутствии избыточного количества видимых КА ГНСС, кроме того, имеет другие недостатки.
Недостатками способа-прототипа являются:
1) невозможность применения способа в случае, если количество КА ГНСС в зоне радиовидимости НАП не превышает четырех КА;
2) влияние ионосферы на распространение радиосигнала навигационного сообщения, принятого НАП, способное привести к его искажению и в результате некорректному результату анализа качества принятых НАП навигационных сообщений или снижению вероятности выявления ошибочных навигационных сообщений;
3) отсутствие возможности внесения признака неисправности в альманах КА ГНСС;
4) при неблагоприятном взаимном пространственном расположении видимых КА, для которого свойственно большое значение коэффициента геометрии рабочего созвездия КА, вероятность обнаружения некорректного навигационного сообщения снижается, так как коэффициент геометрии является мерой уменьшения точности навигационных определений, обусловленных особенностями пространственного расположения КА [1, с.365].
Задачи, на решение которых направлено заявленное изобретение, состоят в обеспечении оперативности и достоверности обнаружения некорректных навигационных сообщений, транслируемых КА ГНСС, и оперативном оповещении потребителей о нарушении целостности навигационного поля ГНСС.
Основной технический результат, достигаемый заявленным изобретением, заключается в оперативном обнаружении нарушения функционирования некоторого КА ГНСС, передающего некорректный навигационный сигнал, и оперативном внесении признака нарушения функционирования такого КА в навигационные сообщения системы.
Сущность изобретения состоит в том, что для контроля целостности навигационного поля глобальной навигационной спутниковой системы применяют навигационную аппаратуру потребителя, осуществляют прием навигационных сообщений космических аппаратов, находящихся в зоне радиовидимости, выполняют навигационные определения, при этом используют часть принятых навигационных сообщений, получают несколько наборов координат потребителей, выявляют космический аппарат, навигационные сообщения которого не должны использоваться для навигационных определений, согласно изобретению навигационную аппаратуру потребителя и аппаратуру формирования и передачи признака неисправности космического аппарата глобальной навигационной спутниковой системы размещают на борту низкоорбитального космического аппарата, в орбитальном полете которого при обнаружении нарушения функционирования космического аппарата глобальной навигационной спутниковой системы формируют и передают признак неисправности, который принимают в бортовых комплексах управления космических аппаратов навигационной системы и вносят признак неисправности в альманах системы.
Существенные признаки, характеризующие изобретение.
1. Размещение аппаратуры контроля навигационного поля в околоземном космическом пространстве путем выведения на орбиту низкоорбитального космического аппарата, на борту которого размещена совокупность аппаратных средств, включающих навигационную аппаратуру потребителя, позволяющих проводить:
- прием навигационных сообщений космических аппаратов, находящихся в зоне радиовидимости, и выявление КА ГНСС с нарушением функционирования бортовой аппаратуры, навигационные сообщения которого не должны использоваться для навигационных определений;
- формирование и передачу признака выявленной неисправности функционирования бортовой аппаратуры КА ГНСС.
2. Постоянное нахождение в зоне радиовидимости низкоорбитального аппарата около 12 космических аппаратов ГНСС, что позволяет:
- непрерывно получать избыточную навигационную информацию;
- непрерывно проводить анализ качества навигационных сигналов всех видимых КА ГНСС;
- оперативно выявить некорректный навигационный сигнал и оперативно передать признак неисправности на борт КА ГНСС.
3. Отсутствие в навигационных сигналах, принимаемых для контроля целостности, искажений, вызванных влиянием ионосферы.
4. Выполнение следующей совокупности последовательных действий для контроля целостности навигационного поля:
- непрерывный прием навигационных сообщений КА ГНСС, находящихся в зоне радиовидимости, и выявление КА с нарушением функционирования бортовой аппаратуры, навигационные сообщения которого не должны использоваться для навигационных определений;
- формирование и передача признака выявленной неисправности функционирования бортовой аппаратурой низкоорбитального КА для приема на КА ГНСС.
Признаки, отличающие заявленный способ от способа-прототипа. 1. Размещение аппаратуры, предназначенной для контроля целостности навигационного поля в околоземном космическом пространстве и позволяющей:
- непрерывно принимать большее количество навигационных сообщений для анализа целостности навигационного поля по сравнению со способом-прототипом, что обеспечивает возможность непрерывного анализа целостности по избыточной навигационной информации;
- принимать и анализировать навигационные сообщения, на распространение радиосигнала которых ионосфера не оказывала влияние.
2. Наличие на борту аппаратуры формирования и передачи признака неисправности в бортовую аппаратуру КА ГНСС.
Для реализации заявленного способа целесообразно применять низкоорбитальный космический аппарат с высотой орбиты от 600 до 2000 км, на котором следует размещать описанную выше совокупность аппаратных средств, так как, во-первых, на таких высотах в зоне радиовидимости низкоорбитального космического аппарата находится около 12 КА ГНСС, во-вторых, ионосфера оказывает незначительное влияние на радиосигнал навигационного сообщения при распространении его от КА ГНСС до низкоорбитального космического аппарата.
При сравнении со способом-прототипом заявленный способ за счет размещения аппаратуры контроля целостности поля в околоземном космическом пространстве отличается следующими достоинствами:
- возможностью постоянного контроля целостности навигационного поля путем анализа избыточной навигационной информации - навигационных сигналов около 12 навигационных космических аппаратов, находящихся в зоне радиовидимости;
- высокой достоверностью анализа целостности навигационного поля за счет возможности обработки большого количества навигационных сообщений и отсутствием искажений радиосигнала, вызванных влиянием ионосферы;
- высокой оперативностью контроля целостности навигационного поля за счет возможности непрерывного анализа качества принимаемых сигналов и оперативной передачи признака неисправности с борта низкоорбитального космического аппарата в бортовые комплексы управления КА ГНСС;
- возможностью выбора для навигационных определений созвездия КА ГНСС, пространственное расположение которых характеризуется хорошим значением коэффициента геометрии, способствующим малой погрешности расчета координат.
Блок-схема устройства, предназначенного для установки на борту низкоорбитального космического аппарата и осуществления предлагаемого способа, представлена на фиг.1.
Устройство содержит приемную антенну 1 и передающую антенну 2, навигационную аппаратуру потребителя глобальной навигационной спутниковой системы 3, передающее устройство 4, бортовую цифровую вычислительную машину (БЦВМ) 5.
При этом выход антенны 1 соединен с входом навигационной аппаратуры потребителя 3, выход навигационной аппаратуры потребителя 3 соединен со входом БЦВМ 5, вход антенны 2 соединен с выходом передающего устройства 4, вход передающего устройства 4 соединен с выходом БЦВМ 5.
Устройство работает следующим образом.
Антенна 1 принимает навигационные сигналы КА ГНСС, находящихся в зоне радиовидимости, затем сигналы поступают на вход навигационной аппаратуры потребителя 3 и затем на вход БЦВМ 5 с выхода устройства 3. БЦВМ 5 осуществляет обработку избыточной навигационной информации, расчет нескольких наборов координат потребителей, анализ принятых навигационных сообщений и контроль целостности навигационного поля. После обнаружения нарушения функционирования бортовой аппаратуры некоторого КА ГНСС и выявления КА ГНСС, навигационные сообщения которого не должны использоваться для навигационных определений, БЦВМ 5 формирует признак неисправности, который поступает на вход передающего устройства 4, а затем с выхода устройства 4 на вход антенны 2. Антенна 2 транслирует сигнал признака неисправности для приема его на КА ГНСС и внесения признака неисправности в альманах ГНСС.
Литература
1. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И.Петрова, В.Н.Харисова. - М.: Радиотехника, 2005.
Изобретение относится к спутниковой навигации и может использоваться для оперативного контроля целостности навигационного поля глобальной навигационной спутниковой системы (ГНСС). Технический результат - расширение функциональных возможностей. Для этого контроль целостности осуществляют на низкоорбитальном космическом аппарате, на котором устанавливают навигационную аппаратуру потребителя. При этом в процессе орбитального полета непрерывно осуществляют прием навигационных сообщений видимых космических аппаратов (КА) ГНСС, выполняют навигационные определения, используют часть принятых навигационных сообщений и получают несколько наборов координат потребителей. Путем обработки избыточной навигационной информации анализируют качество навигационных сигналов всех видимых КА ГНСС. При обнаружении нарушения функционирования некоторого КА ГНСС оперативно формируют и передают признак неисправности, который принимают в бортовых комплексах управления КА ГНСС и вносят признак неисправности в альманах системы. 1 ил.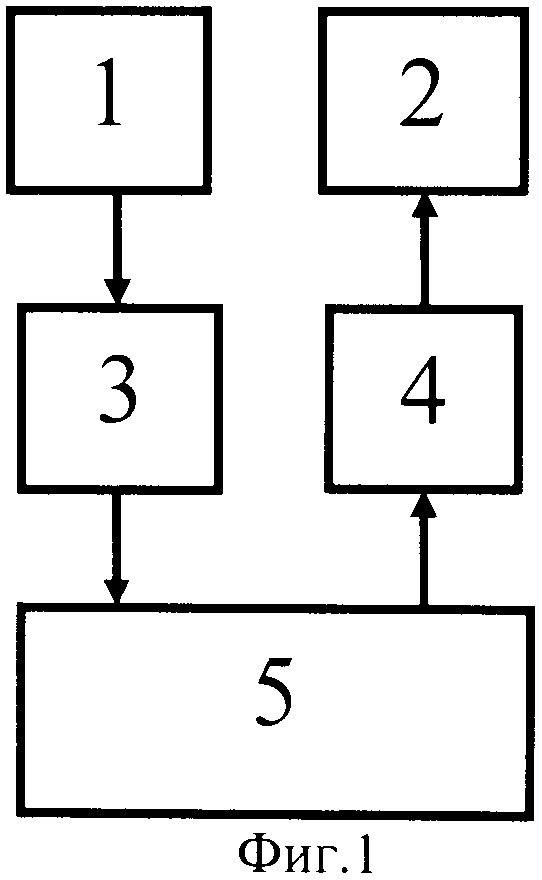
Способ контроля целостности навигационного поля глобальной навигационной спутниковой системы, в котором применяют навигационную аппаратуру потребителя, осуществляют прием навигационных сообщений космических аппаратов, находящихся в зоне радиовидимости, выполняют навигационные определения, при этом используют часть принятых навигационных сообщений, получают несколько наборов координат потребителей, выявляют космический аппарат, навигационные сообщения которого не должны использоваться для навигационных определений, отличающийся тем, что навигационную аппаратуру потребителя и аппаратуру формирования и передачи признака неисправности космического аппарата глобальной навигационной спутниковой системы размещают на борту низкоорбитального космического аппарата, в орбитальном полете которого при обнаружении нарушения функционирования космического аппарата глобальной навигационной спутниковой системы передают признак неисправности, который принимают в бортовых комплексах управления космических аппаратов навигационной системы и вносят признак неисправности в альманах системы.
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| Бортовые устройства спутниковой радионавигации / Под ред | |||
| В.С.ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1988, с.200 | |||
| СПОСОБ ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ ОРБИТАЛЬНОГО БАЗИРОВАНИЯ К ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ | 2008 |
|
RU2367910C1 |
| ГЛОНАСС | |||
| Принципы построения и функционирования | |||
| / Под ред | |||
| А.И.ПЕТРОВА, В.Н.ХАРИСОВА | |||
| - М: Радиотехника, 2005 | |||
| RU 2008126993 А, 10.01.2010 | |||
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2411533C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |

