Изобретение относится к космической навигации и может использоваться для расчета эфемерид космических аппаратов (КА) глобальной навигационной спутниковой системы (ГНСС).
Уровень техники.
Известен способ эфемеридного обеспечения процесса управления КА ГНСС, при котором параметры орбит и эфемериды каждого КА определяют с помощью разветвленной сети наземных контрольных измерительных станций [1, с.16-17]. Под эфемеридным обеспечением понимают определение и прогноз параметров движения всех КА ГНСС с целью последующей передачи этой информации космическими аппаратами в навигационном сообщении потребителям [1, с.15]. Параметры движения КА ГНСС, передаваемые в навигационном сообщении, называют эфемеридной информацией [1, с.14].
Сеть наземных станций не обеспечивает постоянное взаимодействие КА ГНСС с наземным комплексом управления ГНСС, поэтому обновление (уточнение) эфемеридной информации на борту КА ГНСС выполняют периодически. Так, в ГНСС ГЛОНАСС используется технология эфемеридного обеспечения, при которой обновление эфемеридной информации осуществляют один или два раза в сутки, а продолжительность прогнозируемого интервала полета составляет около двух витков, т.е. около одних суток [1, с.303]. Исходной информацией для расчета эфемеридной информации служат значения текущих навигационных параметров движения КА, измеренные наземными контрольными станциями и переданные в координационно-вычислительный центр управления ГНСС, в котором осуществляют определение орбит и расчет эфемеридной информации. При этом для высокоточных расчетов эфемеридной информации ежесуточно осуществляют 10…12 сеансов измерений по каждому КА ГНСС [1, с.302].
Недостатками описанного способа являются:
- большое количество ежесуточных измерений текущих навигационных параметров, выполняемых наземными контрольными измерительными станциями и необходимых для расчета эфемеридной информации с требуемой точностью (для 24 КА ГНСС требуется проведение около 240 сеансов измерений текущих навигационных параметров);
- появление погрешности эфемерид КА ГНСС, возникающей вследствие отличия прогнозируемого физического состояния космической среды от действительного состояния на интервале прогнозирования движения КА и расчета эфемерид, в связи с тем, что продолжительность интервала прогноза эфемерид составляет около одних суток [1, с.303].
Известен способ эфемеридного обеспечения, позволяющий повысить точность эфемерид, при котором для измерения параметров взаимного движения КА ГНСС, определения (уточнения) параметров их орбит применяется бортовая аппаратура межспутниковых измерений (БАМИ) [1, с.448-458], предназначенная для решения следующих задач: измерения параметров взаимного движения КА ГНСС; передачи эфемерид и частотно-временных поправок в сети КА ГНСС. Измерение параметров взаимного движения осуществляется путем измерения псевдодальностей и псевдоскоростей движения одних КА ГНСС относительно других. Способ позволяет снизить погрешность эфемерид за счет частого уточнения параметров орбит с помощью БАМИ и последующего расчета эфемерид бортовым комплексом управления каждого КА ГНСС.
Способ обеспечивает определение параметров взаимного положения КА орбитальной группировки ГНСС. Однако для высокоточных навигационных определений потребителей навигационной информации ГНСС необходимо определить параметры орбит КА в системе координат, связанной с вращающейся Землей, иначе говоря, выполнить привязку параметров орбитальной группировки ГНСС к системе координат потребителя навигационной информации. Привязка достигается определением орбиты одного или нескольких КА с помощью наземных контрольных измерительных станций. После передачи на борт некоторого КА эфемеридной информации, рассчитанной по измерениям наземных станций, способ позволяет уточнить параметры орбит и эфемериды всех КА орбитальной группировки ГНСС относительно этого КА. Такой КА по существу может рассматриваться как КА-эталон, относительно которого непосредственно осуществляют уточнение орбит КА ГНСС. Для обеспечения непрерывного поддержания высокой точности эфемерид КА ГНСС относительно систем координат, связанных с Землей, необходимо поддерживать высокую точность эфемерид одного или нескольких КА-эталонов, что диктует необходимость проведения измерений текущих навигационных параметров их орбит с помощью наземных контрольных измерительных станций.
Недостатками способа являются:
- затраты энергоресурсов КА ГНСС при проведении межспутниковых измерений;
- необходимость проведения измерений текущих навигационных параметров движения КА ГНСС с помощью разветвленной сети наземных контрольных измерительных станций.
Необходимость измерений наземных станций ведет к затратам ресурсов, во-первых, непосредственно для проведения наземным комплексом измерений текущих навигационных параметров, расчета эфемерид и передачи их на борт КА, во-вторых, для поддержания разветвленной сети измерительных станций наземного комплекса в работоспособном состоянии. Так как измерительные станции являются дорогостоящими техническими системами, затраты ресурсов являются значительными. Кроме того, не все КА орбитальной группировки ГНСС могут быть видимы одновременно одним КА-эталоном. Так, при обзоре с любого КА орбитальной группировки ГНСС часть из них закрыта Землей, поэтому рассчитать эфемериды всех КА орбитальной группировки ГНСС непосредственно относительно одного КА-эталона невозможно. Это вызывает:
- или необходимость уточнения эфемерид тех КА ГНСС, которые невидимы КА-эталоном, путем межспутниковых измерений относительно других КА, эфемериды которых рассчитаны непосредственно относительно КА-эталона, что приводит к накоплению погрешности расчета эфемерид при межспутниковых измерениях;
- или необходимость использования нескольких КА-эталонов, что приводит к увеличению затрат ресурсов наземного комплекса управления ГНСС для расчета эфемерид нескольких КА-эталонов.
Известен способ-прототип эфемеридного обеспечения процесса управления КА ГНСС, в котором осуществляют синхронизацию бортовой шкалы времени каждого КА с системной шкалой времени, измеряют псевдодальности и псевдоскорости движения КА с помощью бортовой аппаратуры межспутниковых измерений, при котором на орбиту с прямым или обратным наклонением выводят низкоорбитальный космический аппарат, на котором размещают аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени ГНСС, аппаратуру измерения текущих навигационных параметров движения по сигналам эфирного телевидения наземных стационарных телевизионных радиостанций и определения по ним параметров орбиты низкоорбитального космического аппарата, бортовую аппаратуру межспутниковых измерений, при орбитальном полете синхронизируют бортовую шкалу времени низкоорбитального космического аппарата с системной шкалой времени ГНСС, определяют параметры орбиты низкоорбитального космического аппарата по сигналам телевизионных радиостанций, проводят межспутниковые измерения параметров движения космических аппаратов навигационной системы относительно низкоорбитального космического аппарата, на борту низкоорбитального космического аппарата формируют навигационное сообщение, содержащее параметры его орбиты, измеренные по телевизионным сигналам, которое транслируют и принимают на борту космических аппаратов навигационной системы, в бортовых комплексах управления КА ГНСС определяют параметры их орбит и эфемериды по межспутниковым измерениям и параметрам орбиты низкоорбитального космического аппарата.
В способе-прототипе определение орбиты низкоорбитального КА осуществляют по измерениям параметров сигнала некоторых наземных радиостанций, которые названы в дальнейшем наземными радиомаяками.
Недостатком способа-прототипа является необходимость проведения межспутниковых измерений между КА ГНСС и низкоорбитальным КА для определения параметров орбит КА ГНСС. Это приводит, во-первых, к необходимости установки на низкоорбитальный КА бортовой аппаратуры межспутниковых измерений, во-вторых, к затратам энергоресурсов КА ГНСС на проведение межспутниковых измерений.
Раскрытие изобретение.
Задача, на решение которой направлено заявленное изобретение, состоит в обеспечении высокой точности эфемерид КА ГНСС за счет частого уточнения параметров орбит КА ГНСС без проведения межспутниковых измерений и измерений текущих навигационных параметров КА ГНСС наземными измерительными станциями.
Основной технический результат, достигаемый заявленным изобретением, заключается в непрерывном поддержании высокой точности эфемерид космических аппаратов навигационной системы за счет непрерывного уточнения параметров их орбит по измеренным значениям параметров сигнала навигационного сообщения.
Сущность изобретения состоит в том, что для эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы осуществляют синхронизацию бортовой шкалы времени каждого космического аппарата с системной шкалой времени, в бортовых комплексах управления космических аппаратов навигационной системы рассчитывают эфемериды по параметрам их орбиты, на орбиту с прямым или обратным наклонением выводят низкоорбитальный космический аппарат, на котором размещают аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени глобальной навигационной спутниковой системы, аппаратуру измерения текущих навигационных параметров движения по сигналам наземных радиомаяков и определения по ним параметров орбиты низкоорбитального космического аппарата, при его орбитальном полете синхронизируют бортовую шкалу времени низкоорбитального космического аппарата с системной шкалой времени глобальной навигационной спутниковой системы, определяют параметры орбиты низкоорбитального космического аппарата по сигналам наземных радиомаяков, согласно изобретению, на низкоорбитальном космическом аппарате устанавливают навигационную аппаратуру потребителя, с помощью которой принимают навигационное сообщение космического аппарата глобальной навигационной спутниковой системы, измеряют доплеровское смещение частоты сигнала навигационного сообщения, на борту низкоорбитального космического аппарата рассчитывают параметры орбиты навигационного космического аппарата по измеренным значениям доплеровского смещения частоты и параметрам орбиты низкоорбитального космического аппарата, транслируют рассчитанные параметры орбиты и принимают их на борту космического аппарата навигационной системы.
Доплеровское смещение частоты сигнала навигационного сообщения, измеренное на борту низкоорбитального КА, является по существу текущим навигационным параметром, используемым при расчете параметров орбиты КА ГНСС.
Существенные признаки, характеризующие изобретение
1. Измерение текущих навигационных параметров движения КА ГНСС на низкоорбитальном космическом аппарате по принимаемому сигналу навигационного сообщения КА ГНСС.
2. Выполнение следующей совокупности последовательных действий для расчета эфемерид КА ГНСС:
- синхронизация бортовой шкалы времени низкоорбитального КА с системной шкалой времени ГНСС путем применения штатных наземных станций, используемых для синхронизации бортовых шкал времени КА ГНСС с системной шкалой времени;
- определение параметров орбиты низкоорбитального КА по текущим навигационным параметрам, измеренным по сигналам наземных радиомаяков;
- прием сигнала навигационного сообщения КА ГНСС и измерение доплеровского смещения частоты сигнала сообщения бортовой аппаратурой низкоорбитального космического аппарата;
- определение параметров орбиты КА ГНСС на борту низкоорбитального КА по измерениям доплеровского смещения частоты сигнала навигационного сообщения и параметрам орбиты низкоорбитального КА;
- трансляция рассчитанных параметров орбиты КА ГНСС с борта низкоорбитального космического аппарата и прием их на борту КА ГНСС;
- расчет эфемерид навигационных КА бортовыми комплексами управления по параметрам орбиты, рассчитанным на низкоорбитальном КА.
Признаки, отличающие заявленный способ от способа-прототипа:
1) измерение текущих навигационных параметров движения КА ГНСС на низкоорбитальном космическом аппарате по принимаемому сигналу навигационного сообщения без проведения межспутниковых измерений;
2) определение параметров орбиты КА ГНСС на борту низкоорбитального космического аппарата.
Навигационные сообщения КА ГНСС излучают постоянно. Заявленный способ позволяет уточнять на борту низкоорбитального КА параметры орбиты навигационного КА после приема каждого переданного им навигационного сообщения. Можно утверждать, что заявленный способ позволяет уточнять параметры орбит КА ГНСС, находящихся в зоне радиовидимости низкоорбитального КА, непрерывно. За счет непрерывности уточнения параметров орбит КА ГНСС заявленный способ позволяет поддерживать высокую точность эфемерид непрерывно.
Для осуществления приема и обработки навигационных сообщений КА ГНСС, необходимых для реализации заявленного способа, затраты энергоресурсов низкоорбитального КА невелики.
Способ-прототип обеспечивает возможность уточнения эфемерид после проведения межспутниковых измерений между низкоорбитальным КА и КА ГНСС. Так как бортовые энергоресурсы ограничены, межспутниковые измерения и уточнение эфемерид в соответствии со способом-прототипом могут проводиться периодически. Заявленный способ обеспечивает возможность непрерывного уточнения параметров орбиты КА ГНСС, что позволяет повысить точность эфемерид по сравнению со способом-прототипом.
Достоинствами заявленного изобретения являются:
- повышение точности эфемерид КА ГНСС, находящихся в зоне радиовидимости низкоорбитального КА, за счет непрерывного измерения текущих навигационных параметров их движения и определения орбит по излучаемым навигационным сигналам;
- возможность непрерывного поддержания высокой точности эфемерид КА ГНСС за счет непрерывного проведения измерений текущих навигационных параметров КА ГНСС по сигналу навигационного сообщения;
- отсутствие необходимости затрат энергоресурсов КА ГНСС для обеспечения непрерывного поддержания высокой точности эфемерид КА ГНСС.
Блок-схема устройства, предназначенного для установки на борту низкоорбитального космического аппарата и осуществления предлагаемого способа, представлена на чертеже.
Устройство содержит антенну 1, направленную к центру Земли, приемопередающее устройство 2, бортовую цифровую вычислительную машину (БЦВМ) 3, аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени глобальной навигационной спутниковой системы 4, аппаратуру 5 для измерения текущих навигационных параметров движения по сигналам радиомаяков и определения по ним параметров орбиты низкоорбитального космического аппарата, навигационную аппаратуру потребителя 6, приемную антенну 7 и передающую антенну 8, обе направленные в космическое пространство противоположно центру Земли.
При этом первый вход приемопередающего устройства 2 соединен с выходом антенны 1, а второй вход соединен с первым выходом БЦВМ 3, первый выход устройства 2 соединен со входом антенны 8, второй выход приемо-передающего устройства 2 соединен с первым входом БЦВМ 3, второй вход БЦВМ 3 соединен с выходом аппаратуры 4, третий вход БЦВМ 3 соединен с выходом аппаратуры 5, четвертый вход БЦВМ 3 соединен с выходом аппаратуры 6, второй выход БЦВМ 3 соединен со входом аппаратуры 4, третий выход БЦВМ 3 соединен со входом аппаратуры 5, четвертый выход БЦВМ 3 соединен со первым входом аппаратуры 6, второй вход аппаратуры 6 соединен с выходом антенны 7.
Устройство работает следующим образом.
Аппаратура 4 осуществляет синхронизацию бортовой шкалы времени с системной шкалой времени. При этом сигналы, соответствующие значениям времени бортовой шкалы, необходимые для расчета поправок бортовой шкалы к системной шкале времени, поступают с выхода аппаратуры 4 на второй вход БЦВМ 3, формирующей радиосигнал, который затем поступает с первого выхода БЦВМ 3 на второй вход приемопередающего устройства 2, затем с первого выхода устройства 2 на вход антенны 1, которая транслирует радиосигнал в направлении наземной контрольной станции, осуществляющей синхронизацию. Антенна 1 принимает сигналы значений поправок бортовой шкалы к системной шкале времени, рассчитанных и переданных наземной контрольной станцией, которые поступают с выхода антенны 1 на первый вход приемопередающего устройства 2, потом со второго выхода устройства 2 на первый вход БЦВМ 3, и затем со второго выхода БЦВМ 3 на вход аппаратуры 4.
Аппаратура 5 определяет параметры орбиты низкоорбитального космического аппарата по сигналам радиомаяков. При этом антенна 1 принимает сигналы радиомаяков, которые с выхода антенны 1 поступают на первый вход приемопередающего устройства 2, затем со второго выхода устройства 2 на первый вход БЦВМ 3, затем с третьего выхода БЦВМ 3 на вход аппаратуры 5, которая измеряет значения текущих навигационных параметров по сигналам и радиомаяков определяет параметры орбиты.
Навигационная аппаратура потребителя 6 принимает сигналы навигационных сообщений КА ГНСС, поступающие с выхода антенны 7, которые затем поступают на четвертый вход БЦВМ 3. При этом сигналы бортовой шкалы времени, необходимые для измерения доплеровского смещения частоты сигнала навигационного сообщения, поступают с выхода аппаратуры 4 на второй вход БЦВМ 3, которая осуществляет измерения доплеровского смещения частоты сигнала навигационного сообщения.
БЦВМ 3 рассчитывает параметра орбиты навигационного космического аппарата по измеренным значениям доплеровского смещения частоты и параметрам орбиты низкоорбитального космического аппарата, формирует сообщение с параметрами орбиты КА ГНСС. БЦВМ 3 формирует сигнал сообщения, содержащего параметры орбиты КА ГНСС, который поступает с первого выхода БЦВМ 3 на второй вход приемопередающего устройства 2, и затем с первого выхода устройства 2 на вход антенны 8. Антенна 8 транслирует сигнал навигационного сообщения для приема его на космическом аппарате КА ГНСС, параметры орбиты которого рассчитаны.
БЦВМ 3 управляет функционированием и взаимодействием всех подсистем устройства. Определение параметров орбиты КА ГНСС по измеренным значениям доплеровского смещения частоты или соответствующим им значениям радиальной скорости осуществляется методами, изложенными в работе [2, с.145-185].
Литература
1. ГЛОНАСС. Принципы построения и функционирования. / Под ред. А.И.Петрова, В.Н.Харисова. - М.: Радиотехника, 2005.
2. Патент №2390730 РФ, МПК3 G01C 21/24. Способ эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы. / Стрельников С.В., заявлено 06.04.2009, опубл. 27.05.2010.
3. Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических аппаратов. - М.: Дрофа, 2004.
Изобретение относится к спутниковой навигации и может использоваться для эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы (КА ГНСС). Технический результат - повышение точности измерений. Для этого на орбиту выводят низкоорбитальный космический аппарат, на котором размещают аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени, аппаратуру определения параметров орбиты по сигналам наземных радиомаяков, навигационную аппаратуру потребителя. При его орбитальном полете синхронизируют бортовую шкалу времени с системной шкалой времени ГНСС, определяют параметры орбиты по сигналам радиомаяков, принимают сигнал навигационного сообщения КА ГНСС, измеряют доплеровское смещение частоты сигнала сообщения. По параметрам орбиты низкоорбитального космического аппарата и измеренным значениям доплеровского смещения частоты сигнала сообщения на борту низкоорбитального космического аппарата определяют орбиту навигационных КА ГНСС и транслируют их для приема на КА ГНСС. 1 ил.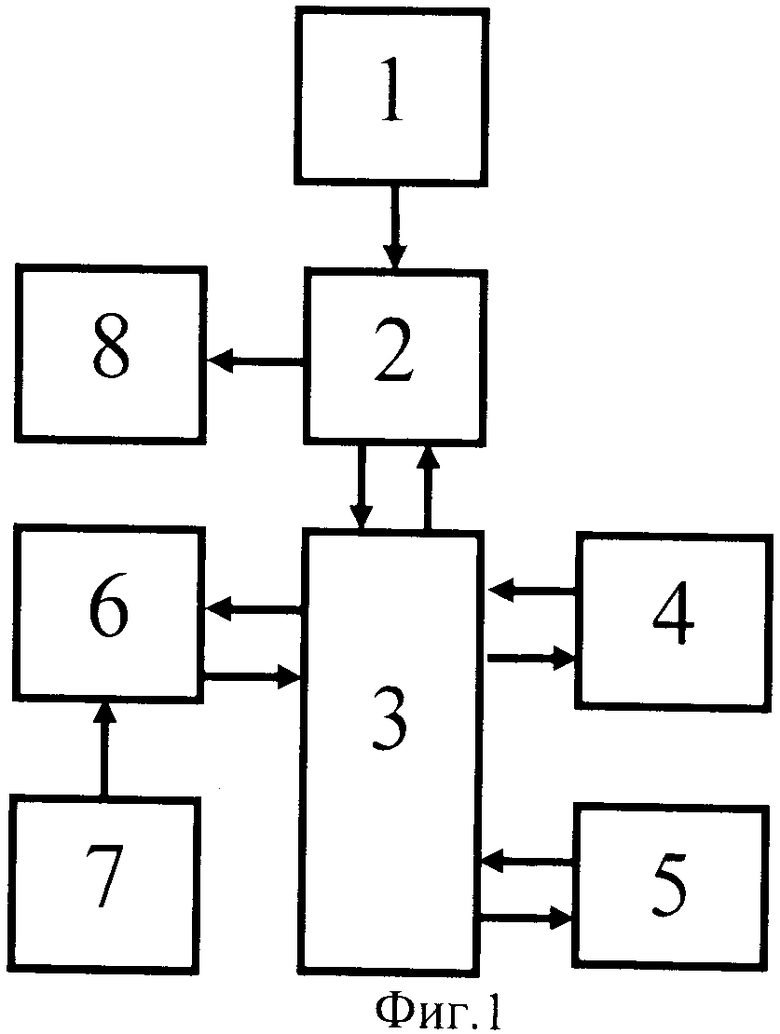
Способ эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы состоит в том, что для эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы осуществляют синхронизацию бортовой шкалы времени каждого космического аппарата с системной шкалой времени, в бортовых комплексах управления космических аппаратов навигационной системы рассчитывают эфемериды по параметрам их орбиты, на орбиту с прямым или обратным наклонением выводят низкоорбитальный космический аппарат, на котором размещают аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени глобальной навигационной спутниковой системы, аппаратуру измерения текущих навигационных параметров движения по сигналам наземных радиомаяков и определения по ним параметров орбиты низкоорбитального космического аппарата, при его орбитальном полете синхронизируют бортовую шкалу времени низкоорбитального космического аппарата с системной шкалой времени глобальной навигационной спутниковой системы, определяют параметры орбиты низкоорбитального космического аппарата по сигналам наземных радиомаяков, отличающийся тем, что на низкоорбитальном космическом аппарате устанавливают навигационную аппаратуру потребителя, с помощью которой принимают навигационное сообщение космического аппарата глобальной навигационной спутниковой системы, измеряют доплеровское смещение частоты сигнала навигационного сообщения, на борту низкоорбитального космического аппарата по измеренным значениям доплеровского смещения частоты и параметрам орбиты низкоорбитального космического аппарата, транслируют рассчитанные параметры орбиты и принимают их на борту космического аппарата навигационной системы.
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| Бортовые устройства спутниковой радионавигации / Под ред | |||
| В.С.ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1988, с.200 | |||
| СПОСОБ ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ ОРБИТАЛЬНОГО БАЗИРОВАНИЯ К ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ | 2008 |
|
RU2367910C1 |
| ГЛОНАСС | |||
| Принципы построения и функционирования | |||
| / Под ред | |||
| А.И.ПЕТРОВА, В.Н.ХАРИСОВА | |||
| - М: Радиотехника, 2005 | |||
| RU 2008126993 А, 10.01.2010 | |||
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2411533C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |

