Изобретение относится к средствам пассивной радиолокации источников электромагнитных сигналов, в частности к способам многопунктового местоопределения источников импульсных сигналов, и может быть использовано для определения местоположения излучателя и отражателя внутри помещения.
В системах местоопределения источников импульсных сигналов на плоскости часто используются трехпунктовые гиперболические системы местоопределения, основанные на разностях моментов прихода сигнала в приемные пункты (ПП), не требующие направленных антенн и двухсторонней связи между излучателем и ПП [1]. При увеличении количества ПП свыше трех для получения усредненной оценки местоположения источника излучения используется метод разбиения многопунктовой системы на всевозможные трехпунктовые гиперболические системы, вычисления с их помощью первичных оценок местоположения источника и принятия в качестве результирующей оценку с максимальной величиной группировки первичных оценок, где максимальна вычисленная плотность вероятности нахождения источника излучения [2, 4].
Известен способ местоопределения источника излучения на плоскости, реализованный в [3]. Этот способ основан на приеме сигнала источника излучения приемной системой, содержащей N (N≥3) ПП, расчете разностей моментов прихода сигнала в каждую пару ПП, исключении из рассмотрения каждой из разностей, модуль которой превышает расчетное время распространения сигнала между указанной парой ПП, использовании оставшихся разностей для гиперболического определения первичных оценок местоположения источника излучения (ПОМИИ), а также на исключении из рассмотрения тех ПОМИИ, которые существенно отличаются от некоторой усредненной оценки местоположения источника излучения, и состоит в том, что с помощью всенаправленной вертикальной электрической антенны источника излучают импульсный сигнал, принимают излученный сигнал с помощью всенаправленных вертикальных электрических антенн, расположенных в N территориально разнесенных ПП с известными координатами и снабженных системой единого времени, измеряют в каждом ПП момент прихода указанного сигнала и передают полученное значение по линии связи в пункт обработки, где измеряют разности моментов прихода сигнала в каждую пару ПП, сравнивают модуль каждой полученной разности с расчетным временем распространения сигнала между соответствующей парой ПП и в случае, если модуль полученной разности превосходит расчетное время, исключают эту разность из рассмотрения, используют каждую из оставшихся разностей для расчета гиперболы - линии оценок местоположения источника излучения, принимают точки пересечения полученных при этом гипербол за массив ПОМИИ, исключают из дальнейшего расчета те ПОМИИ, расстояния которых от некоторой усредненной оценки местоположения источника излучения превышают установленное пороговое значение, оставшиеся ПОМИИ усредняют и определяют таким образом результирующую оценку местоположения источника излучения.
Недостатком указанного способа является то, что в этом способе не определяется местоположение отражателя и, кроме того, при наличии помеховых отражателей использованная первоначальная усредненная оценка местоположения источника излучения может существенно отличаться от его истинного местоположения, что в результате может приводить к существенным погрешностям в результирующей оценке местоположения источника излучения.
Наиболее близким к заявленному техническим решением, принятым в качестве прототипа, является способ местоопределения излучателя на плоскости, реализованный в [4]. Этот способ основан на приеме сигнала излучателя многопунктовой приемной системой, определении моментов прихода сигнала в указанные ПП, разбиении ПП на всевозможные тройки ПП с одним общим центральным ПП, определении разностей моментов прихода сигнала соответственно в каждый из периферийных ПП и в центральный ПП, использовании каждой тройки ПП в качестве трехпунктовой гиперболической системы местоопределения, определении с помощью указанных разностей массива ПОМИИ, расчете величины группировки ПОМИИ в каждой из этих же точек и принятии местоположения ПОМИИ с максимальной величиной группировки за результирующую оценку местоположения излучателя.
Этот способ состоит в том, что 1) с помощью всенаправленной вертикальной электрической антенны излучателя, координаты которого подлежат определению, излучают импульсный сигнал, 2) принимают излученный сигнал с помощью всенаправленных вертикальных электрических антенн, расположенных в N (N≥3) территориально разнесенных ПП, координаты которых известны, снабженных системой единого времени, причем один из ПП является центральным, а остальные - периферийными, 3) определяют в каждом ПП момент прихода сигнала излучателя и 4) передают полученное значение по линии связи в пункт обработки, где 5) определяют N-1 разностей моментов прихода сигнала соответственно в каждый из периферийных ПП и в центральный ПП, 6) используют каждую из полученных разностей для определения гиперболы возможного местоположения излучателя, 7) принимают точки пересечения каждой пары указанных гипербол за ПОМИИ, 8) вычисляют с использованием всех указанных гипербол массив ПОМИИ, 9) вычисляют величину группировки массива ПОМИИ в каждой из точек этого же массива, 10) находят ПОМИИ с максимальной величиной группировки и 11) принимают эту ПОМИИ за результирующую оценку местоположения излучателя.
Недостатком указанного способа является то, что в этом способе наличие отражателя с неизвестными координатами может приводить к появлению группировки ПОМИИ вблизи местоположения отражателя и в результате к существенной погрешности результирующей оценки местоположения излучателя.
Целью настоящего изобретения является расширение функциональных возможностей способа местоопределения источника излучения, состоящее в определении местоположения на плоскости как излучателя, так и отражателя с помощью N-пунктовой (N≥8) гиперболической системы местоопределения, а также повышение точности местоопределения излучателя при наличии отражателя за счет вычисления трехмерного массива первичных оценок обобщенных местоположений источников излучения (ПООМИИ), включающих, кроме координат местоположений источников на плоскости, также вычисленные моменты их излучения, принятия ПООМИИ за первичные оценки обобщенных местоположений либо излучателя, либо отражателя, принятия координат ПООМИИ, где достигается абсолютный максимум величины группировки ПООМИИ, за оценку координат первого источника излучения (излучателя или отражателя), нахождения нескольких ПООМИИ, где достигаются относительные максимумы величин группировок ПООМИИ, и принятия полученных в результате усредненных ПООМИИ (УПООМИИ) в качестве "кандидатов" во второй источник излучения, выбор в качестве второго источника излучения того из "кандидатов", который совместно с первым источником излучения наиболее соответствует паре излучатель-отражатель, отнесения каждой из двух полученных в результате оценок к излучателю или отражателю по результату сравнения вычисленных моментов их излучения.
Поставленная цель достигается тем, что в известном способе многопунктового местоопределения источника излучения электромагнитного сигнала, включающем излучение излучателем импульсного сигнала, прием указанного сигнала с помощью приемной системы, состоящей из N (N≥3) территориально разнесенных приемных пунктов (ПП), координаты которых известны, снабженных системой единого времени, причем один из ПП является центральным, а остальные N-1 - периферийными, определение в каждом ПП момента прихода указанного сигнала и передачу полученного значения в пункт обработки, разбиение в пункте обработки всех N ПП на всевозможные тройки ПП с одним общим центральным ПП с образованием  таких троек, определение N-1 разностей моментов прихода сигнала соответственно в каждый из периферийных ПП и в центральный ПП, использование каждой тройки ПП как трехпунктовой гиперболической системы местоопределения, для этого в каждой m-й тройке ПП для каждой из двух полученных разностей вычисление гиперболы возможного местоположения излучателя и принятие точек пересечения указанных гипербол
таких троек, определение N-1 разностей моментов прихода сигнала соответственно в каждый из периферийных ПП и в центральный ПП, использование каждой тройки ПП как трехпунктовой гиперболической системы местоопределения, для этого в каждой m-й тройке ПП для каждой из двух полученных разностей вычисление гиперболы возможного местоположения излучателя и принятие точек пересечения указанных гипербол  ,
,  за первичные оценки местоположений источника излучения (ПОМИИ), где индекс k представляет собой номер пересечения пары указанных гипербол на плоскости (k≤2), при этом после перебора всех трехпунктовых систем, получение массива ПОМИИ: x0q, y0q (q=1÷Q,
за первичные оценки местоположений источника излучения (ПОМИИ), где индекс k представляет собой номер пересечения пары указанных гипербол на плоскости (k≤2), при этом после перебора всех трехпунктовых систем, получение массива ПОМИИ: x0q, y0q (q=1÷Q,  ), расчет величины группировки этого массива в каждой из точек этого же массива, нахождение ПОМИИ с максимальной величиной группировки и принятие этой ПОМИИ за усредненную оценку местоположения источника излучения, согласно изобретению минимальное количество ПП увеличивают до 8 (N≥8), из указанных N ПП составляют всевозможные тройки ПП с образованием
), расчет величины группировки этого массива в каждой из точек этого же массива, нахождение ПОМИИ с максимальной величиной группировки и принятие этой ПОМИИ за усредненную оценку местоположения источника излучения, согласно изобретению минимальное количество ПП увеличивают до 8 (N≥8), из указанных N ПП составляют всевозможные тройки ПП с образованием  таких троек, при определении каждой ПОМИИ определяют также оценку момента излучения источника
таких троек, при определении каждой ПОМИИ определяют также оценку момента излучения источника  , для вычисления которой в каждой m-й
, для вычисления которой в каждой m-й  трехпунктовой системе местоопределения из момента прихода сигнала в произвольно выбранный первый ПП этой тройки ПП вычитают время распространения сигнала от вычисленного местоположения источника излучения до первого ПП:
трехпунктовой системе местоопределения из момента прихода сигнала в произвольно выбранный первый ПП этой тройки ПП вычитают время распространения сигнала от вычисленного местоположения источника излучения до первого ПП:

где с=3*10 м/с - скорость распространения электромагнитного сигнала (скорость света), откуда после перебора всех трехпунктовых систем получают массив трехмерных первичных оценок обобщенных местоположений источников излучения (ПООМИИ): x0q, y0q, z0q (q=1÷Q,  ), где z0q=c*t0q, t0q - соответствующая оценка момента излучения, a Q - общее количество ПООМИИ, при этом в качестве величины группировки указанного массива в каждой точке этого же массива используют значение Aq, определяемое как
), где z0q=c*t0q, t0q - соответствующая оценка момента излучения, a Q - общее количество ПООМИИ, при этом в качестве величины группировки указанного массива в каждой точке этого же массива используют значение Aq, определяемое как

где  - обобщенное расстояние между n-й и q-й ПООМИИ, а параметр R выбирают порядка ожидаемой шумовой погрешности ПООМИИ, последовательно определяют ПООМИИ, соответствующие абсолютному и нескольким относительным максимумам группировок, и принимают их за усредненные оценки обобщенного местоположения источников излучения (УПООМИИ), при этом УПООМИИ с абсолютно максимальной величиной группировки x0q1, y0q1, z0q1 (q1:max(Aq)) принимают за результирующую УПООМИИ первого источника излучения (излучателя или отражателя), а остальные УПООМИИ принимают за "кандидатов" во второй источник излучения, для определения которых последовательно из исходного массива ПООМИИ образуют следующий массив ПООМИИ, обобщенные расстояния точек которого от точки с координатами x0q1, y0q1, z0q1: Rnq1 превышают наперед заданную пороговую величину Rк:
- обобщенное расстояние между n-й и q-й ПООМИИ, а параметр R выбирают порядка ожидаемой шумовой погрешности ПООМИИ, последовательно определяют ПООМИИ, соответствующие абсолютному и нескольким относительным максимумам группировок, и принимают их за усредненные оценки обобщенного местоположения источников излучения (УПООМИИ), при этом УПООМИИ с абсолютно максимальной величиной группировки x0q1, y0q1, z0q1 (q1:max(Aq)) принимают за результирующую УПООМИИ первого источника излучения (излучателя или отражателя), а остальные УПООМИИ принимают за "кандидатов" во второй источник излучения, для определения которых последовательно из исходного массива ПООМИИ образуют следующий массив ПООМИИ, обобщенные расстояния точек которого от точки с координатами x0q1, y0q1, z0q1: Rnq1 превышают наперед заданную пороговую величину Rк:
Rnq1≥Rк, (n=1÷Q),
где 
причем Rк по величине устанавливают порядка  , где rm - минимальное ожидаемое расстояние между излучателем и отражателем на плоскости, в каждой точке полученного массива ПООМИИ объемом Q2 определяют величину группировки этого же массива, аналогично определению Aq:
, где rm - минимальное ожидаемое расстояние между излучателем и отражателем на плоскости, в каждой точке полученного массива ПООМИИ объемом Q2 определяют величину группировки этого же массива, аналогично определению Aq:

определяют точку полученного массива с максимальной величиной группировки
x0q2, y0q2, z0q2 (q2:Max(Bq (q=1÷Q2))), повторяют циклически указанную процедуру расчетов УПООМИИ заданное число раз, образуя каждый последующий массив ПООМИИ из тех элементов предыдущего массива, обобщенные расстояния которых от УПООМИИ, полученной на предыдущем шаге расчета, превышает Rк, получают в результате S УПООМИИ с обобщенными координатами x0qi, y0qi, z0qi (i=2÷S+1), при этом для каждого i-го "кандидата" вычисляют величину βi

где  - модуль разности вычисленных моментов излучения, а
- модуль разности вычисленных моментов излучения, а  - вычисленное расстояние на плоскости между УПООМИИ первого источника излучения и УПООМИИ i-го "кандидата" во второй источник излучения, сравнивают полученные значения βi между собой по величине и принимают за результирующую оценку второго источника излучения того j-го "кандидата", у которого βj минимально: (j:Min(βi, (i=2÷S+1))), при этом моменты излучения первой j-й УПООМИИ t0q1 и t0qj сравнивают между собой по величине и принимают УПООМИИ с более ранним моментом излучения за результирующую оценку местоположения излучателя, а с более поздним - за результирующую оценку местоположения отражателя.
- вычисленное расстояние на плоскости между УПООМИИ первого источника излучения и УПООМИИ i-го "кандидата" во второй источник излучения, сравнивают полученные значения βi между собой по величине и принимают за результирующую оценку второго источника излучения того j-го "кандидата", у которого βj минимально: (j:Min(βi, (i=2÷S+1))), при этом моменты излучения первой j-й УПООМИИ t0q1 и t0qj сравнивают между собой по величине и принимают УПООМИИ с более ранним моментом излучения за результирующую оценку местоположения излучателя, а с более поздним - за результирующую оценку местоположения отражателя.
Новым в предложенном способе многопунктового местоопределения излучателя электромагнитного сигнала и отражателя по сравнению с прототипом является образование из N ПП всевозможных трехпунктовых гиперболических систем местоопределения, расчет при каждой ПОМИИ момента излучения соответствующего излучателя, образования таким образом массива ПООМИИ в трехмерном пространстве признаков: x, y, z, где x, y - координаты источника на плоскости, z=c*t, t - время, при этом определение величин группировок массива ПООМИИ в каждой точке этого же массива, последовательное определение абсолютного и нескольких относительных максимумов величин группировок ПООМИИ, принятие УПООМИИ с абсолютно максимальной величиной группировки за результирующую оценку первого источника излучения, а УПООМИИ с относительными максимумами величин группировок - за "кандидатов" в результирующую оценку второго источника излучения, проверка соответствия первого источника излучения и каждой из УПООМИИ - "кандидата" во второй источник излучения паре излучатель-отражатель, для этого сравнение вычисленного расстояния на плоскости между проверяемой парой УПООМИИ и расстояния, проходимого сигналом за вычисленную разность моментов излучения этих источников, принятие того "кандидата", у которого относительное расхождение этих расстояний минимально, за результирующую оценку второго источника излучения, при этом из полученной в результате пары источников излучения принятие за излучатель того, у которого более ранний вычисленный момент излучения, а оставшегося - за отражатель.
На фиг.1÷5 приведены графики, иллюстрирующие предлагаемый способ.
На фиг.1 приведен пример контролируемой территории площадью 10×10 м2, на которой по диагонали симметрично относительно центра расположены излучатель (И) и отражатель (О) на расстоянии 3 м друг от друга, а по периметру помещения расположены 12 приемных пунктов (ПП1÷ПП12) с примерно одинаковым шагом. Рассмотрен случай, когда 8 ПП (ПП1÷ПП8) принимают сигналы непосредственно от излучателя, а остальные 4 ПП (ПП9÷ПП12) - после отражения от отражателя. Стрелками на графике указаны пути распространения сигнала от излучателя до каждого ПП.
На фиг.2 приведен пример расположения точек массива ПОМИИ, попавших на обслуживаемую территорию: x0q, y0q (q=1÷Q, Q=211), для приведенного на фиг.1 расположения И, О и ПП. На графике (так же, как и на фиг.3÷5) стрелки указывают на места расположения источника (И) и отражателя (О). (ПОМИИ, не попавшие на контролируемую территорию, на графике не отображены, также как соответствующие ПООМИИ на фиг.3 и Aq на фиг.4-5).
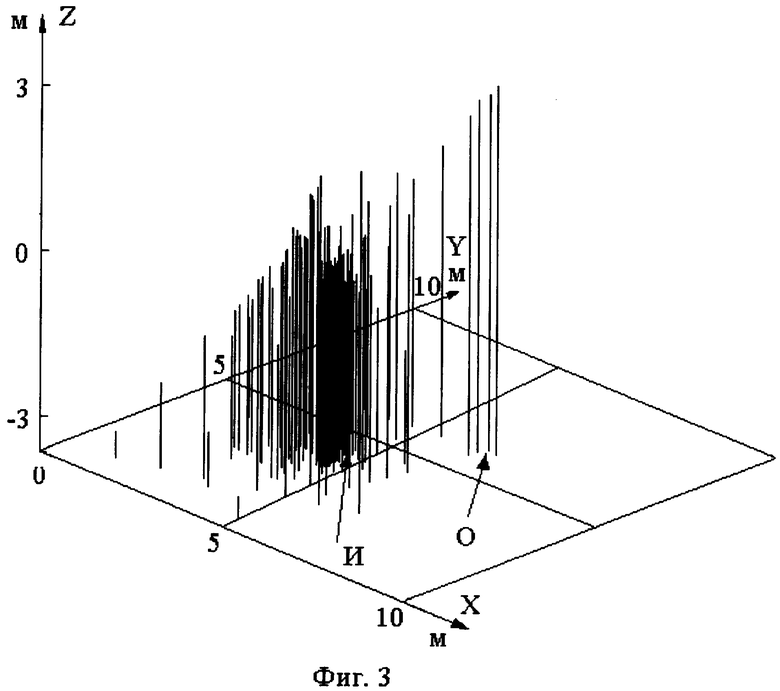
На фиг.3 приведен массив трехмерных ПООМИИ, соответствующий массиву ПОМИИ на фиг.2: x0q, y0q, z0q (q=1÷Q), z0q=c*t0q, где t0q - вычисленный момент излучения источника, расположенного в указанной ПООМИИ, при этом величины z0q обозначены вертикальными столбцами вдоль оси z, а момент излучения сигнала излучателем принят за t0=0.
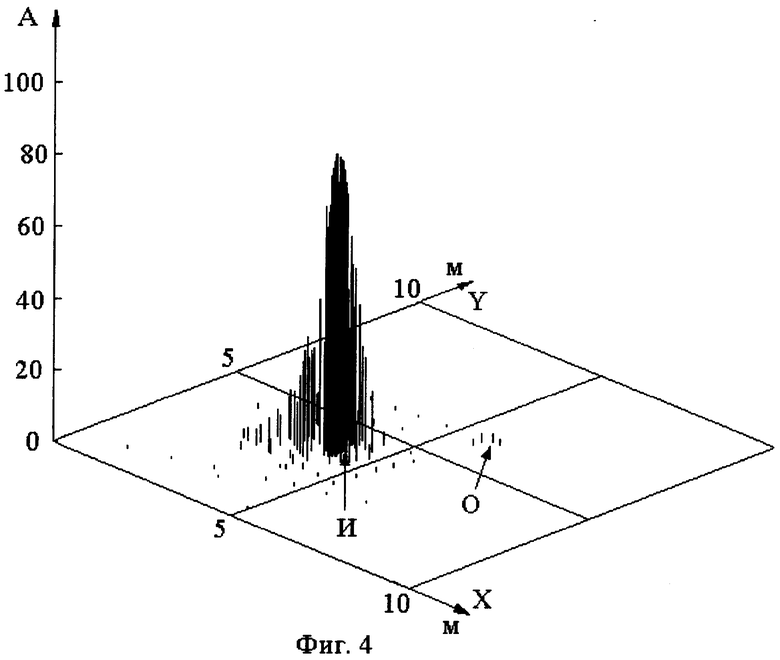
На фиг.4 приведены вычисленные по формуле (3) величины группировок массива ПООМИИ, соответствующие фиг.3, в точках этого же массива Aq (q=1÷Q) как функции от x, y.
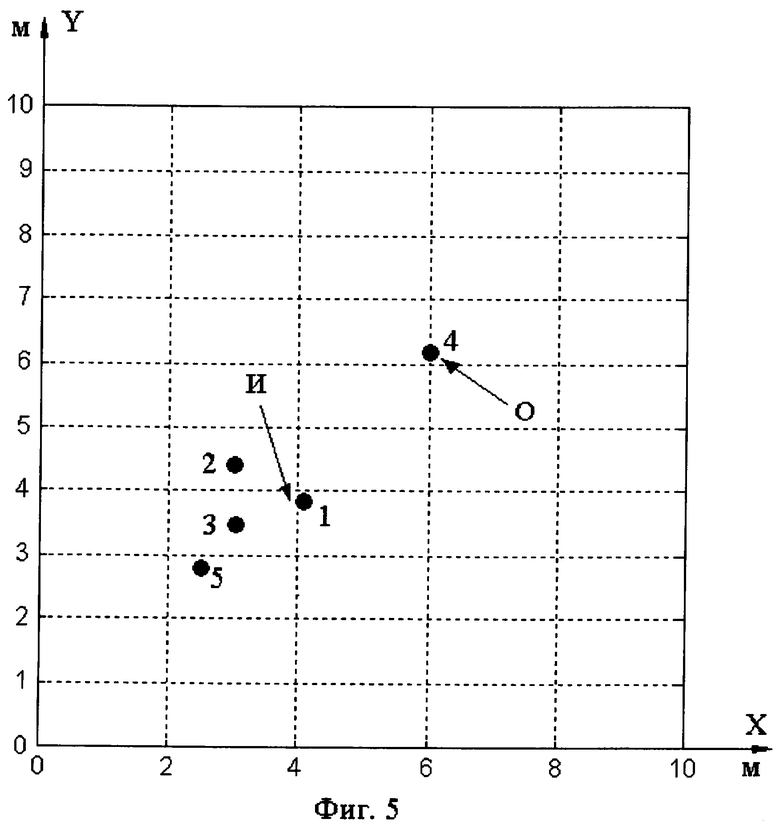
На фиг.5 приведены проекции на плоскость x, y абсолютного и первых четырех (S=4) (в порядке убывания) относительных максимумов величин группировок УПООМИИ, соответствующих вычисленному массиву Aq (q=1÷Q), приведенному на фиг.4. Около каждого максимума приведен его порядковый номер.
Сущность предлагаемого способа основана на приеме сигналов от излучателя и отражателя, местоположение которых подлежит определению, многопунктовой гиперболической системой местоопределения, вычислении массива трехмерных ПООМИИ, включающих, кроме координат источников на плоскости, также моменты их излучения, на вычислении величины группировки указанного массива в каждой из точек этого же массива, на определении УПООМИИ первого источника (излучателя или отражателя) в точке с максимальной величиной группировки, на последовательном определении наперед заданного количества S относительных максимумов группировки ПООМИИ - УПООМИИ с монотонно уменьшающимися величинами группировок и принятии их за "кандидатов" во второй источник излучения, причем расчет каждого последующего УПООМИИ осуществляется по массиву ПООМИИ, образованному из предыдущего массива при исключении из него тех ПООМИИ, обобщенные расстояния которых от предыдущего УПООМИИ не превышают наперед заданной пороговой величины и которые предполагаются принадлежащими предыдущему "кандидату" во второй источник, а также на вычислении для каждой пары УПООМИИ соответственно первого источника излучения и поочередно каждого из вычисленных "кандидатов" во второй источник излучения, относительного расхождения двух расстояний - вычисленного расстояния на плоскости и модуля разности вычисленных моментов излучения, помноженного на скорость распространения сигнала, и принятии того "кандидата", которому соответствует минимум относительного расхождения полученных расстояний, за результирующую оценку второго источника излучения, при этом из полученной в результате пары УПООМИИ за излучатель принимается УПООМИИ с более ранним моментом излучения, а за отражатель - с более поздним.
Местоопределение излучателя и отражателя осуществляется следующим образом. Как и в известном способе [4], местоопределение источника излучения осуществляется с помощью N-пунктовой приемной системы, в которой ПП территориально разнесены, а их координаты известны. В каждом ПП, снабженном системой единого времени, определяется момент прихода сигнала источника излучения, который по линии связи передается в пункт обработки. В отличие от [4] в пункте обработки все N ПП разбиваются на всевозможные тройки ПП, а не только на тройки ПП с одним общим центральным ПП, с образованием  таких троек, каждая тройка ПП используется как трехпунктовая гиперболическая система местоопределения, в которой по разности моментов прихода сигнала в каждый из двух произвольно выбранных периферийных ПП относительно центрального ПП этой тройки ПП определяются две гиперболы - линии местоположения оценок источника излучения (в каждой из трехпунктовых систем номером 1 обозначен центральный ПП, а номерами 2 и 3 - периферийные):
таких троек, каждая тройка ПП используется как трехпунктовая гиперболическая система местоопределения, в которой по разности моментов прихода сигнала в каждый из двух произвольно выбранных периферийных ПП относительно центрального ПП этой тройки ПП определяются две гиперболы - линии местоположения оценок источника излучения (в каждой из трехпунктовых систем номером 1 обозначен центральный ПП, а номерами 2 и 3 - периферийные):

где t1m, t2m и t3m - моменты прихода сигнала, a x1m,, y1m; x2m, x3m и x3m, y3m - координаты соответствующих ПП в m-й тройке ПП, с=3*108/с - скорость распространения электромагнитного сигнала (скорость света),  и
и  - координаты k-й оценки местоположения источника излучения, полученные при использовании m-й тройки ПП, а индекс k представляет собой номер решения системы уравнений (1) - номер точки пересечения пары гипербол, количество точек пересечения не превышает двух, откуда k может принимать значение либо 0 - отсутствие решения, либо 1, либо 1 и 2. В результате перебора всех трехпунктовых систем образуется массив ПОМИИ: x0q, y0q (q=1÷Q, ). Полученный массив используется для определения величины группировки этого массива в каждой из Q точек этого же массива.
- координаты k-й оценки местоположения источника излучения, полученные при использовании m-й тройки ПП, а индекс k представляет собой номер решения системы уравнений (1) - номер точки пересечения пары гипербол, количество точек пересечения не превышает двух, откуда k может принимать значение либо 0 - отсутствие решения, либо 1, либо 1 и 2. В результате перебора всех трехпунктовых систем образуется массив ПОМИИ: x0q, y0q (q=1÷Q, ). Полученный массив используется для определения величины группировки этого массива в каждой из Q точек этого же массива.
В отличие от [4] в настоящей заявке определяется также местоположение отражателя в случае, когда некоторые ПП принимают сигнал непосредственно от излучателя, а другие из-за перекрытия прямого пути распространения сигнала от излучателя до ПП - после отражения от отражателя, как это показано на фиг.1. Это происходит, например, при определении момента прихода сигнала в ПП по превышению огибающей сигнала установленного порогового уровня, при этом даже частичное перекрытие прямого пути распространения сигнала от излучателя до ПП приводит к тому, что принятый сигнал излучателя может оказаться по амплитуде меньше порогового уровня, а сигнал отражателя - больше порогового уровня. Так как трехпунктовая гиперболическая система местоопределения дает не более одной правильной оценки местоположения источника излучения, для образования массива оценок каждого из источников необходимо, чтобы количество ПП, принимающих сигнал от каждого из источников, было не менее четырех, откуда требуемое общее количество ПП для местоопределения излучателя и отражателя должно быть не менее восьми (N≥8).
Для этого для каждой ПОМИИ оценивается также момент излучения источника как разность между моментом прихода сигнала в центральный ПП тройки ПП и временем распространения сигнала от вычисленного местоположения источника до центрального ПП:

После перебора все всех трехпунктовых систем образуется массив ПООМИИ: x0q, y0q, z0q, где z0q=c*t0q (q=1÷Q) в трехмерном пространстве признаков x, y, z (z=c*t), в каждой из точек этого массива вычисляется величина группировки этого же массива Aq, (q=1÷Q), в качестве которой используется значение

где  - обобщенное расстояние между n-й и q-й ПООМИИ, а параметр R выбирают порядка ожидаемой шумовой погрешности ПООМИИ, координаты точки x0q1, y0q1, z0q1 (z0q1=c*t0q1), (q1:Max(Aq, (q=1÷Q))), соответствующей абсолютному максимуму Aq, принимают в качестве результирующей УПООМИИ первого источника излучения (излучателя или отражателя без конкретизации на этом шаге расчета).
- обобщенное расстояние между n-й и q-й ПООМИИ, а параметр R выбирают порядка ожидаемой шумовой погрешности ПООМИИ, координаты точки x0q1, y0q1, z0q1 (z0q1=c*t0q1), (q1:Max(Aq, (q=1÷Q))), соответствующей абсолютному максимуму Aq, принимают в качестве результирующей УПООМИИ первого источника излучения (излучателя или отражателя без конкретизации на этом шаге расчета).
При определении второго источника излучения учитывается, что кроме группировок ПООМИИ вблизи истинных обобщенных местоположений двух источников могут образовываться случайные (фиктивные) группировки, расположенные в точках, существенно отличающихся от истинных обобщенных местоположений источников, что вызывается в основном тем, что некоторые трехпунктовые системы местоопределения принимают сигналы от разных источников (два ПП принимают сигнал от одного источника, а в третий - от другого), при этом если общее количество ПП, принимающих сигнал от одного из источников, существенно меньше, чем количество ПП, принимающих сигнал от второго источника, то величина группировки ПООМИИ близи истинного местоположения такого источника может оказаться меньшей, чем величины случайных группировок. Поэтому полагается, что источнику, сигнал которого принимает большинство ПП, соответствует УПООМИИ с абсолютным максимумом группировки, для определения же местоположения второго источника последовательно определяется наперед заданное количество S УПООМИИ в точках, где достигаются относительные максимумы группировки ПООМИИ, эти УПООМИИ принимаются за "кандидатов" во второй источник излучения, при этом расчет величины группировки ПООМИИ на каждом шаге расчета "кандидата" осуществляется не по всему массиву ПООМИИ, а с последовательным исключением тех ПООМИИ, которые предположительно принадлежат источнику излучения, которому соответствует предыдущая УПООМИИ. Для этого вначале из исходного массива ПООМИИ образуется второй массив ПООМИИ, точки которого отстоят от УПООМИИ первого источника - точки с координатами x0q1, y0q1, z0q1 (z0q1=c*t0q1) на величину, большую наперед заданной пороговой величины Rк

где  - обобщенное расстояние между n-й и q1-й ПООМИИ, а Rк выбирается порядка , где rm - минимальное ожидаемое расстояние между излучателем и отражателем на плоскости.
- обобщенное расстояние между n-й и q1-й ПООМИИ, а Rк выбирается порядка , где rm - минимальное ожидаемое расстояние между излучателем и отражателем на плоскости.
В каждой точке полученного массива ПООМИИ объемом Q2 определяется величина группировки этого же массива, аналогично (3);

затем определяется точка этого массива с максимальной величиной группировки (q2:Max(Bq(q=1÷Q2))), координаты которой x0q2, y0q2, z0q2 (z0q2=c*t0q2) принимаются в качестве УПООМИИ первого "кандидата" во второй источник излучения. Полученный массив ПООМИИ используется аналогично для определения следующего массива ПООМИИ и, соответственно, следующего "кандидата" во второй источник излучения, такой расчет продолжается циклически до определения S-го "кандидата".
Для определения результирующей оценки местоположения второго источника излучения осуществляется следующая процедура: между УПООМИИ первого источника излучения и каждым из S УПООМИИ - "кандидатов" во второй источник излучения, соответственно пары: x01, y01, t01 и x0i, y0i t0i (i=2÷S+1), определяются двумя способами два расстояния -
1) геометрическое расстояние на плоскости:

2) расстояние, проходимое сигналом за интервал времени, равный разности вычисленных моментов излучения этих источников:

Если проверяемой парой источников являются излучатель и отражатель, то при отсутствии помех эти расстояния равны. Поэтому ищется тот "кандидат" во второй источник излучения, который совместно с УПООМИИ первого источника излучения наиболее близко соответствует паре излучатель-отражатель, для этого вычисляются относительные расхождения полученных расстояний:

Тот из S "кандидатов", у которого βi минимально (j:Мин(βi)), принимается за второй источник излучения, полученные при этом моменты излучения t01 и t0j сравниваются между собой по величине, и с учетом того, что момент отражения сигнала от отражателя запаздывает по времени относительно момента излучения сигнала излучателем, вычисленный источник излучения с более ранним моментом излучения принимается за излучатель, а с более поздним - за отражатель.
Так как трехпунктовая гиперболическая система местоопределения дает не более одной правильной оценки местоположения источника излучения, для образования массива оценок каждого из источников (излучателя и отражателя) необходимо, чтобы количество ПП, принимающих сигнал от каждого из источников, было не менее четырех, откуда требуемое общее количество ПП для раздельного местоопределения излучателя и отражателя должно быть не менее восьми (N≥8).
На фиг.1÷5 приведены графики, иллюстрирующие предлагаемый способ.
На фиг.1 приведен пример контролируемой территории площадью 10×10 м2, на которой по диагонали симметрично относительно центра расположены излучатель (И) и отражатель (О) на расстоянии 3 м друг от друга, а по периметру помещения расположены 12 ПП (ПП1÷ПП12) с примерно одинаковым шагом. Рассмотрен случай, когда 8 ПП (ПП1÷ПП8) принимают сигналы непосредственно от излучателя, а остальные 4 ПП (ПП9÷ПП12) - после отражения от отражателя, причем ПП, принимающие сигнал от каждого из двух источников, расположены вблизи соответствующего источника. Стрелками на графике указаны пути распространения сигнала от излучателя до каждого ПП. (Пункт обработки не указан, он может быть объединен с одним из ПП).
На фиг.2 приведен пример расположения точек массива ПОМИИ, попавших на обслуживаемую территорию: x0q, y0q (q=1÷Q, Q=211) для приведенного на фиг.1 расположения И, О и ПП. На графике (так же, как и на фиг.3÷5) стрелки указывают на места расположения источника (И) и отражателя (О).
При расчетах было установлено стандартное отклонение погрешности оценки момента прихода сигнала в каждый ПП: σt=0.5 нс, R=0.5 м (3), Rк=1 м (4), S=4.
Массив ПОМИИ и, соответственно, ПООМИ составил 211. ПОМИИ, не попавшие на контролируемую территорию, на графике не отображены (также как соответствующие ПООМИИ на фиг.3 и Aq на фиг.4-5).
На графике видно, что некоторые ПОМИИ находятся в точках, далеко отстоящих от истинных местоположений источников, эти оценки являются, как правило, либо вторыми решениями системы уравнений (1), либо перекрестными ошибками, вызванными тем, что в некоторых трехпунктовых гиперболических системах местоопределения сигналы в разные ПП поступают от разных источников (в один ПП от излучателя, а в два другие - от отражателя, либо наоборот).
На фиг.3 приведен массив трехмерных ПООМИИ, соответствующий массиву ПОМИИ на фиг.2: x0q, y0q, z0q (q=1÷Q), где Z0q=c*t0q обозначены вертикальными столбцами вдоль оси z, а момент излучения сигнала излучателем принят за t0=0.
На фиг.4 приведены вычисленные по формуле (3) величины группировки массива ПООМИИ, приведенного на фиг.3, в точках этого же массива Aq (q=1÷Q) как функции от x, y. На графике видно, что вблизи истинного местоположения излучателя величина группировки имеет абсолютный максимум, а вблизи истинного местоположения отражателя величины группировки малы.
На фиг.5 приведены проекции на плоскость x, y абсолютного и первых (в порядке убывания) четырех (S=4) относительных максимумов величин группировок УПООМИИ, соответствующие массиву Aq (q=1÷Q), приведенному на фиг.4. Около каждого максимума приведен его порядковый номер. При этом отличие результирующих оценок местоположения каждого из источников излучения от истинного местоположения соответствующего источника не превысило 20 см.
В таблице приведены соответствующие фиг.5 значения Ai (i=1÷5) и βi (i=2÷5).
При сравнении фиг.5 и приведенной таблицы видно, что у третьего относительного максимума А4, расположенного около истинного местоположения отражателя, вычисленное значение β4 достигает минимума и оказывается по величине в несколько раз меньшим, чем для остальных относительных максимумов Аi.
Предлагаемый способ местоопределения включает следующую последовательность операций: а) излучают с помощью излучателя, координаты которого неизвестны, импульсный СВЧ электромагнитный сигнал длительностью Т=20 нс с прямоугольной огибающей и квазипериодическим заполнением с периодом 0.25 нс с помощью вертикальной электрической антенны высотой 5 см, б) отражают указанный сигнал с помощью отражателя, координаты которого неизвестны, в) принимают излученные сигналы излучателя и отражателя с помощью вертикальных электрических антенн высотой по 5 см каждая, системой, состоящей не менее чем из восьми (N≥8) территориально разнесенных ПП, координаты которых известны, связанных системой единого времени с допустимым расхождением шкал времени между ПП Δt≤0.02 нс, причем каждый ПП принимает сигнал либо излучателя, либо отражателя, при этом в каждом ПП последовательно г) усиливают принятый сигнал, д) фильтруют в полосе частот 2÷6 ГГц с помощью полосового фильтра, е) двухсторонне детектируют, ж) сравнивают с заранее установленным пороговым уровнем, з) определяют момент прихода сигнала как момент первого превышения сигналом порогового уровня, и) передают полученное значение по линии связи в пункт обработки, где й) разбивают все ПП на всевозможные тройки ПП с образованием  таких троек, при этом для каждой тройки ПП к) определяют две разности моментов прихода сигнала в каждый из двух произвольно выбранных ПП относительно третьего ПП, л) каждую из полученных разностей используют для определения гиперболы оценок местоположения источника излучения, м) точки пересечения полученной при этом пары гипербол определяют как ПОМИИ на плоскости, н) для каждой полученной ПОМИИ вычисляют момент излучения источника с образованием трехмерной ПООМИИ, описываемой двумя координатам на плоскости x, y и координатой z=c*t, где t - время, соответствующее моменту излучения, о) после перебора всех троек ПП получают массив ПООМИИ, п) вычисляют величину группировки массива ПООМИИ в каждой из точек этого же массива, р) определяют точку массива с максимальной величиной группировки и с) принимают координаты этой точки за результирующую УПООМИИ первого источника излучения (излучателя или отражателя, не определяя на этом шаге, какой именно), т) определяют обобщенные расстояния между полученной УПООМИИ первого источника излучения и каждой из остальных ПООМИИ, у) образуют второй массив точек ПООМИИ из исходного массива ПООМИИ, обобщенные расстояния которых до УПООМИИ первого источника излучения больше наперед заданной величины, ф) вычисляют группировку нового массива ПООМИИ в точках этого же массива, аналогично вычислению группировки исходного массива, х) находят точку второго массива ПООМИИ с максимальной величиной группировки и ц) принимают координаты этой точки за УПООМИИ первого "кандидата" во второй источник излучения, ч) повторяют указанную процедуру (пп.т÷ц) циклически заданное количество раз S, используя в каждом следующем цикле УПООМИИ и массив ПООМИИ, полученные в предыдущем цикле, при этом образуют S УПООМИИ - "кандидатов" во второй источник излучения, для каждого из которых вычисляют два расстояния до УПООМИИ первого источника излучения, ш) первое - геометрическое на плоскости и щ) второе - расстояние, проходимое сигналом за интервал времени между вычисленными оценками моментов излучения соответствующей пары источников, ы) вычисляют относительное расхождение полученной при этом пары расстояний, э) сравнивают полученные значения расхождений между собой по величине и ю) принимают того "кандидата", у которого оно минимально, за результирующую оценку второго источника излучения, я) сравнивают между собой по величине моменты излучения полученной пары УПООМИИ и принимают УПООМИИ с более ранним моментом излучения за результирующую оценку местоположения излучателя, а с более поздним - отражателя.
таких троек, при этом для каждой тройки ПП к) определяют две разности моментов прихода сигнала в каждый из двух произвольно выбранных ПП относительно третьего ПП, л) каждую из полученных разностей используют для определения гиперболы оценок местоположения источника излучения, м) точки пересечения полученной при этом пары гипербол определяют как ПОМИИ на плоскости, н) для каждой полученной ПОМИИ вычисляют момент излучения источника с образованием трехмерной ПООМИИ, описываемой двумя координатам на плоскости x, y и координатой z=c*t, где t - время, соответствующее моменту излучения, о) после перебора всех троек ПП получают массив ПООМИИ, п) вычисляют величину группировки массива ПООМИИ в каждой из точек этого же массива, р) определяют точку массива с максимальной величиной группировки и с) принимают координаты этой точки за результирующую УПООМИИ первого источника излучения (излучателя или отражателя, не определяя на этом шаге, какой именно), т) определяют обобщенные расстояния между полученной УПООМИИ первого источника излучения и каждой из остальных ПООМИИ, у) образуют второй массив точек ПООМИИ из исходного массива ПООМИИ, обобщенные расстояния которых до УПООМИИ первого источника излучения больше наперед заданной величины, ф) вычисляют группировку нового массива ПООМИИ в точках этого же массива, аналогично вычислению группировки исходного массива, х) находят точку второго массива ПООМИИ с максимальной величиной группировки и ц) принимают координаты этой точки за УПООМИИ первого "кандидата" во второй источник излучения, ч) повторяют указанную процедуру (пп.т÷ц) циклически заданное количество раз S, используя в каждом следующем цикле УПООМИИ и массив ПООМИИ, полученные в предыдущем цикле, при этом образуют S УПООМИИ - "кандидатов" во второй источник излучения, для каждого из которых вычисляют два расстояния до УПООМИИ первого источника излучения, ш) первое - геометрическое на плоскости и щ) второе - расстояние, проходимое сигналом за интервал времени между вычисленными оценками моментов излучения соответствующей пары источников, ы) вычисляют относительное расхождение полученной при этом пары расстояний, э) сравнивают полученные значения расхождений между собой по величине и ю) принимают того "кандидата", у которого оно минимально, за результирующую оценку второго источника излучения, я) сравнивают между собой по величине моменты излучения полученной пары УПООМИИ и принимают УПООМИИ с более ранним моментом излучения за результирующую оценку местоположения излучателя, а с более поздним - отражателя.
При реализации предлагаемого способа устанавливается:
Предлагаемый способ позволяет определить, кроме местоположения излучателя, также местоположение отражателя за счет 1) принятия ПООМИИ, в которой достигается абсолютный максимум величины группировки, за результирующую оценку координат первого источника излучения, 2) определения нескольких ПООМИИ с относительными максимумами величин группировок, 3) принятие полученных при этом УПООМИИ за "кандидатов" во второй источник излучения, 4) определение из этих УПООМИИ той, у которой минимально относительное различие вычисленных расстояний а) на плоскости между этой ПООМИИ и первым вычисленным источником излучения и б) проходимого сигналом за интервал времени между моментами излучения соответствующих источников, 5) сравнения моментов излучения этой пары источников и принятия источника излучения с более ранним моментом излучения за излучатель, а с более поздним - за отражатель.
Технический результат использования предложенного способа по сравнению с прототипом состоит в возможности местоопределения как излучателя, так и отражателя, а также в повышении точности местоопределения источника излучения, что может быть использовано в помещениях, например на складах, для повышения точности местоопределения излучающих объектов при контроле их несанкционированного перемещения.
Литература
1. Антонов О.В., Антонов М.О. Способ распознавания местоположения объекта. Патент №2060513 РФ, 06.10.1992, Кл. MKH G01S 5/02.
2. Гармонов А.В., Кравцова Г.С., Амчиславский А.Ю. Способ определения местоположения мобильного абонента. Патент №2183021 РФ. 25.12.2000. Кл. МКИ G01S 5/14.
3. Erickson B.J., Anderson N.R. Multipath Tolerant Location System and Method Therefore. Patent USA №5.534.876, 09.07.1996. Cl.342-387.
4. Kuwahara М. et al. Position Calculation Method and Position Calculation Apparatus. Patent USA №6.671.649, 30.12.2003. Cl.702-150.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАТЕЛЯ И ОТРАЖАТЕЛЯ | 2009 |
|
RU2407030C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИЗЛУЧАТЕЛЯ И ОТРАЖАТЕЛЯ | 2007 |
|
RU2345378C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИЗЛУЧАТЕЛЯ | 2006 |
|
RU2319164C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ МОЛНИЕВЫХ РАЗРЯДОВ | 1999 |
|
RU2152054C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОЙ СКОРОСТИ ОБЗОРА НАПРАВЛЕННЫХ СКАНИРУЮЩИХ ИЗЛУЧАТЕЛЕЙ | 1974 |
|
SU1840865A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОЛНИЕВОГО РАЗРЯДА И МНОГОПУНКТОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2253133C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2327181C1 |
| СПОСОБ РАЗНОСТНО-ДАЛЬНОМЕРНОГО ОПРЕДЕЛЕНИЯ ДЕКАРТОВЫХ КООРДИНАТ ПРИЕМНИКА | 2005 |
|
RU2310213C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |

Изобретение относится к средствам пассивной радиолокации, в частности к способам многопунктового местоопределения источников излучения, и может быть использовано для контроля за перемещением излучающих объектов и отражателей внутри помещения. Сущность изобретения заключается в том, что импульсный электромагнитный сверхвысокочастотный (СВЧ) сигнал излучателя или отражателя принимается приемной системой, состоящей из N (N≥8) приемных пунктов (ПП), определяются моменты прихода сигнала в ПП, ПП разбиваются на всевозможные тройки трехпунктовой гиперболической системы местоопределения, с помощью которых вычисляются первичные оценки обобщенных местоположений источников излучения, включающие их координаты на плоскости и моменты излучения, определяются абсолютный и относительные максимумы величин группировок этих оценок. Координаты точек, соответствующих абсолютному максимуму величины группировки и одной из оставшихся, наиболее близко соответствующих излучателю и отражателю, принимаются за оценки координат первого и второго источника излучения, путем сравнения вычисленных моментов их излучения, один из этих источников относят к излучателю, а другой - к отражателю. Достигаемый технический результат заключается в определении местоположения как излучателя, так и отражателя и в повышении точности местоопределения излучателя. 5 ил., 1 табл.
Способ определения местоположения излучателя и отражателя, заключающийся в том, что с помощью излучателя излучают импульсный сигнал, принимают указанный сигнал с помощью приемной системы, состоящей из N территориально разнесенных приемных пунктов (ПП), координаты которых известны, снабженных системой единого времени, определяют в каждом ПП момент прихода указанного сигнала и передают полученное значение в пункт обработки, отличающийся тем, что минимальное количество приемных пунктов N≥8, из указанных N ПП в пункте обработки составляют всевозможные тройки ПП с образованием  таких троек, в каждой тройке ПП определяют разности моментов прихода сигнала соответственно в каждый из периферийных ПП и в центральный ПП указанной тройки ПП, используют каждую тройку как трехпунктовую гиперболическую систему местоопределения, для этого в каждой m-ой тройке ПП для каждой из двух полученных разностей вычисляют гиперболу возможного местоположения источника излучения и принимают точки пересечения указанных гипербол
таких троек, в каждой тройке ПП определяют разности моментов прихода сигнала соответственно в каждый из периферийных ПП и в центральный ПП указанной тройки ПП, используют каждую тройку как трехпунктовую гиперболическую систему местоопределения, для этого в каждой m-ой тройке ПП для каждой из двух полученных разностей вычисляют гиперболу возможного местоположения источника излучения и принимают точки пересечения указанных гипербол 
 за первичные оценки местоположения источника излучения (ПОМИИ), где индекс k представляет собой номер пересечения указанных гипербол на плоскости, при определении каждой ПОМИИ определяют также оценку момента излучения источника, откуда, после перебора всех трехпунктовых систем, получают массив трехмерных первичных оценок обобщенных местоположений источников излучения (ПООМИИ): x0q, y0q, z0q (q=1÷Q), где x0q и y0q соответственно x и у координаты q-ой ПООМИИ, z0q=c·t0q,
за первичные оценки местоположения источника излучения (ПОМИИ), где индекс k представляет собой номер пересечения указанных гипербол на плоскости, при определении каждой ПОМИИ определяют также оценку момента излучения источника, откуда, после перебора всех трехпунктовых систем, получают массив трехмерных первичных оценок обобщенных местоположений источников излучения (ПООМИИ): x0q, y0q, z0q (q=1÷Q), где x0q и y0q соответственно x и у координаты q-ой ПООМИИ, z0q=c·t0q,
t0q - соответствующая первичная оценка момента излучения, a Q - общее количество ПООМИИ  при этом в качестве величины группировки указанного массива в каждой точке этого же массива используют значение Aq, определяемое как:
при этом в качестве величины группировки указанного массива в каждой точке этого же массива используют значение Aq, определяемое как:

где  - обобщенное расстояние между n-ой и q-ой ПООМИИ, а параметр R выбирают порядка ожидаемой шумовой погрешности ПООМИИ, определяют несколько ПООМИИ с максимальными значениями группировок и принимают их за усредненные оценки обобщенного местоположения источника излучения (УПООМИИ), при этом УПООМИИ с абсолютно максимальной величиной группировки: x0q1, y0q1, z0q1 (q1:max(Aq)) принимают за УПООМИИ первого источника излучения, затем из исходного массива ПООМИИ образуют второй массив ПООМИИ, обобщенные расстояния точек которого от точки с координатами x0q1, y0q1, z0q1: Rnq1 превышают наперед заданную пороговую величину Rk:
- обобщенное расстояние между n-ой и q-ой ПООМИИ, а параметр R выбирают порядка ожидаемой шумовой погрешности ПООМИИ, определяют несколько ПООМИИ с максимальными значениями группировок и принимают их за усредненные оценки обобщенного местоположения источника излучения (УПООМИИ), при этом УПООМИИ с абсолютно максимальной величиной группировки: x0q1, y0q1, z0q1 (q1:max(Aq)) принимают за УПООМИИ первого источника излучения, затем из исходного массива ПООМИИ образуют второй массив ПООМИИ, обобщенные расстояния точек которого от точки с координатами x0q1, y0q1, z0q1: Rnq1 превышают наперед заданную пороговую величину Rk:
Rnq1≥Rк, (n=1÷Q),
где 
причем  по величине устанавливают порядка
по величине устанавливают порядка  где
где  - минимальное ожидаемое расстояние между излучателем и отражателем на плоскости, в каждой точке полученного массива ПООМИИ объемом Q2 определяют величину группировки этого же массива, аналогично определению Aq:
- минимальное ожидаемое расстояние между излучателем и отражателем на плоскости, в каждой точке полученного массива ПООМИИ объемом Q2 определяют величину группировки этого же массива, аналогично определению Aq:

определяют точку полученного массива с максимальной величиной группировки: (q2:Max(Bq (q=1÷Q2))), найденную ПООМИИ с обобщенными координатами x0q2, y0q2, z0q2 принимают за первую УПООМИИ второго источника излучения, повторяют циклически указанную процедуру расчетов УПООМИИ заданное число раз, образуя каждый последующий массив ПООМИИ из тех элементов предыдущего массива, обобщенные расстояния которых от УПООМИИ, полученной на предыдущем шаге расчета, превышает Rк, получают в результате S УПООМИИ, обобщенные координаты которых: x0qi, y0qi, z0qi (i=2÷S+1) принимают за «кандидатов» во второй источник излучения, при этом для каждого i-го "кандидата" вычисляют величину βi:
где  - модуль разности вычисленных моментов излучения, а
- модуль разности вычисленных моментов излучения, а  - вычисленное расстояние на плоскости между УПООМИИ первого источника излучения и УПООМИИ i-го "кандидата" во второй источник излучения, сравнивают полученные значения βj между собой по величине и принимают за результирующую оценку второго источника излучения того j-го "кандидата", у которого βj, минимально: (j:Min(βi, (i=2÷S+1))), при этом моменты излучения первой и j-й УПООМИИ: t0q1 и t0qj сравнивают между собой по величине и принимают УПООМИИ с более ранним моментом излучения за результирующую оценку местоположения излучателя, а с более поздним - за результирующую оценку местоположения отражателя.
- вычисленное расстояние на плоскости между УПООМИИ первого источника излучения и УПООМИИ i-го "кандидата" во второй источник излучения, сравнивают полученные значения βj между собой по величине и принимают за результирующую оценку второго источника излучения того j-го "кандидата", у которого βj, минимально: (j:Min(βi, (i=2÷S+1))), при этом моменты излучения первой и j-й УПООМИИ: t0q1 и t0qj сравнивают между собой по величине и принимают УПООМИИ с более ранним моментом излучения за результирующую оценку местоположения излучателя, а с более поздним - за результирующую оценку местоположения отражателя.
| US 6671649 A1, 09.10.2003 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И ДИПОЛЬНЫЙ РАДИООТРАЖАТЕЛЬ | 1993 |
|
RU2057350C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НА РАБОЧЕЙ ПЛОЩАДКЕ | 1991 |
|
RU2014417C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ОБЪЕКТОВ | 2001 |
|
RU2210789C2 |
| US 6163297 A, 19.12.2000 | |||
| Пъезоэлектрический воспламенитель | 1977 |
|
SU676825A1 |
| WO 2006114426 A1, 02.11.2006. | |||

