Изобретение относится к измерительной технике и может быть использовано в системах управления перемещением по- движных объектов, в частности в системах управления самолетами.
Целью изобретения является расширение функциональных возможностей преобразователя угловых перемещений за счет измерения угловых перемещений, а также повышение точности измерения угловых перемещений по трем координатным осям.
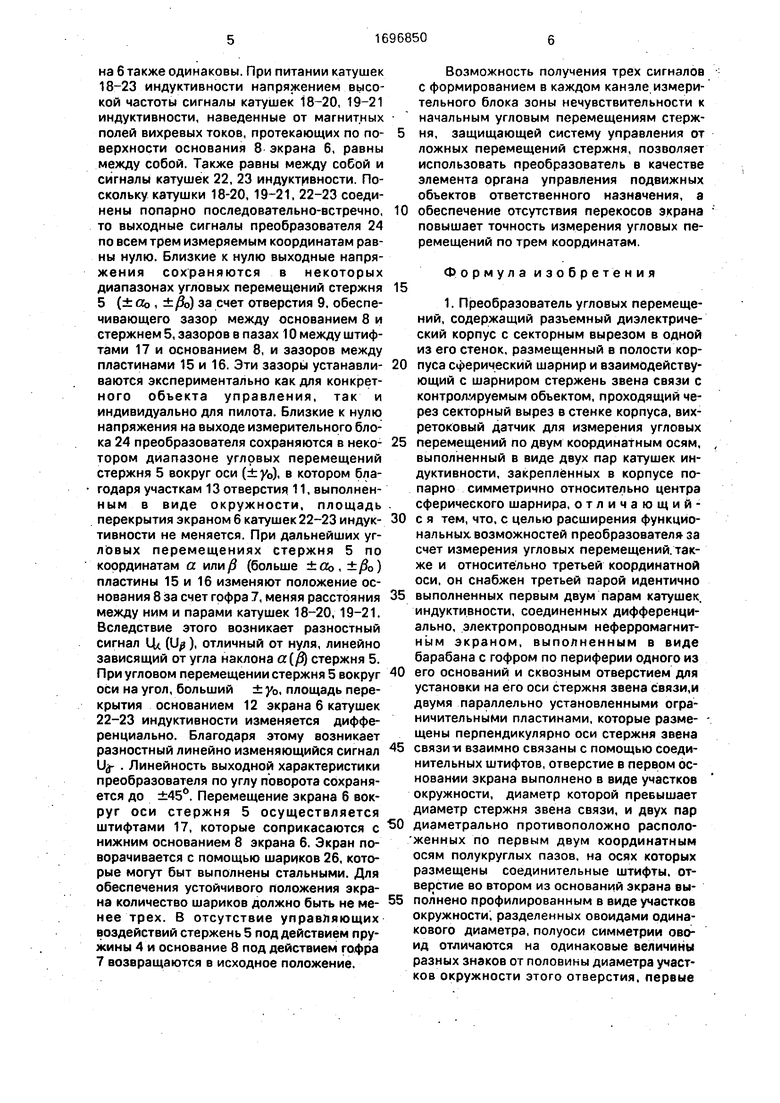
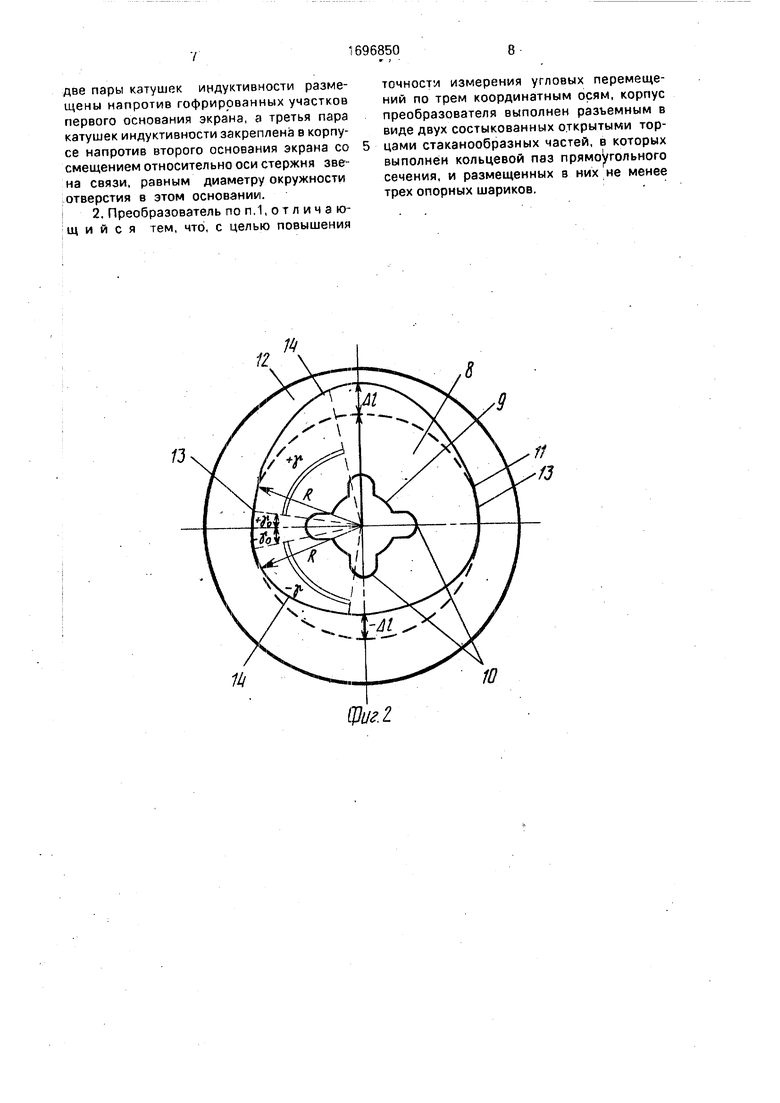
На фиг.1 показан преобразователь угловых перемещений, продольное сечение; на фиг.2 - конструкция якоря преобразователя, вид сверху; на фиг.З - сечение А-А на фиг.1.
Преобразователь угловых перемещений содержит разъемный диэлектрический корпус 1 с секторным вырезом 2 в одной из его стенок. В полости корпуса 1 размещен сферически шарнир 3 и взаимодействующий с шарниром 3 с помощью пружины 4 стержень 5 звена связи с контролируемым объектом,.В полости корпуса 1 вплотную к его стенкам установлен электропроводный неферромагнитный экран 6, выполненный в виде барабана с гофром 7 по периферии его основания 8. Экран 6 имеет сквозное отверстие для установки на его оси стержня 5 звена связи. Отверстие 9 в первом основа- .нии 8 экрана 6 выполнено в виде окружности, диаметр которой превышает диаметр стержня 5 звена связи, с двумя парами противоположно расположенных подиум координатным осям полукруглых пазов 10. Отверстие 11 во втором основании 12 экрана 6 выполнено профилированным в виде участков 13 окружности, разделенных овоидами 14 одинакового диаметра, Полуоси симметрии овоидов 14 отличаются на одинаковые величины Al разных знаков от половины диаметра участков 13 окружности этого отверстия 11. На стержне 5 звена связи перпендикулярно его оси установлены параллельно две ограничительные пластины 15 и 16, взаимносвязанные с помощью соединительных штифтов 17, размещенных на осях пазов 10. В стенках корпуса 1 размещены катушки 18-23 индуктивности вихретокового датчика для измерения угловых
перемещений.
Катушки 18-20, 19-21 индуктивности расположены в стенке корпуса 1 попарно симметрично относительно центра сферического шарнира 3 напротив гофрированных участков 7 первого основания 8 экрана 6. Катушки 18-20, 19-21 соединены между собой последовательно-встречно. Катушки 22-23 индуктивности закреплены в корпусе 1 напротив основания 12 экрана 6 сосмещением относительно оси стержня 5 звена связи, равным диаметру окружности участков 13 отверстия 11 в этом основании экрана. Между собой эти катушки соединены также последовательно-встречно. Выводы катушек соединены с измерительным блоком 24. С целью повышения точности преобразования корпус 1 может быть выполнен в виде двух состыкованных открытыми торцами стаканообразных частей, в которых выполнен кольцевой паз 25 прямоугольного сечения для размещения в них не менее трех опорных шариков 26,
Преобразователь угловых перемещений работает следующим образом,
В исходном состоянии стержень 5 звена связи с контролируемым объектом занимает положение, перпендикулярное основаниям экрана 6. При этом зазоры между основанием 8 экрана 6 и катушками 18-20, 19-21
индуктивности одинаковы. Площади перекрытия катушек 22, 23 основанием 12 экрана 6 также одинаковы. При питании катушек 18-23 индуктивности напряжением высокой частоты сигналы катушек 18-20, 19-21 индуктивности, наведенные от магнитных полей вихревых токов, протекающих по по- верхности основания 8 экрана 6. равны между собой. Также равны между собой и сигналы катушек 22, 23 индуктивности. Поскольку катушки 18-20, 19-21, 22-23 соединены попарно последовательно-встречно, то выходные сигналы преобразователя 24 по всем трем измеряемым координатам равны нулю. Близкие к нулю выходные напряжения сохраняются в некоторых диапазонах угловых перемещений стержня 5 (± Оо , ±Д) за счет отверстия 9, обеспечивающего зазор между основанием 8 и стержнем 5, зазоров в пазах 10 между штифтами 17 и основанием 8, и зазоров между пластинами 15 и 16. Эти зазоры устанавли- ваются экспериментально как для конкретного объекта управления, так и индивидуально для пилота. Близкие к нулю напряжения на выходе измерительного блока 24 преобразователя сохраняются в неко- тором диапазоне угловых перемещений стержня 5 вокруг оси (±Уо), в котором благодаря участкам 13 отверстия 11, выполнен- ным в виде окружности, площадь перекрытия экраном 6 катушек 22-23 индук- тивности не меняется. При дальнейших угловых перемещениях стержня 5 по координатам а или/ (больше ±оъ, ) пластины 15 и 16 изменяют положение основания 8 за счет гофра 7, меняя расстояния между ним и парами катушек 18-20, 19-21. Вследствие этого возникает разностный сигнал LU (U0), отличный от нуля, линейно зависящий от угла наклона а(у8) стержня 5. При угловом перемещении стержня 5 вокруг оси на угол, больший ± у0, площадь перекрытия основанием 12 экрана 6 катушек 22-23 индуктивности изменяется дифференциально. Благодаря этому возникает разностный линейно изменяющийся сигнал Цг . Линейность выходной характеристики преобразователя по углу поворота сохраняется до ±45°. Перемещение экрана 6 вокруг оси стержня 5 осуществляется штифтами 17, которые соприкасаются с нижним основанием 8 экрана 6. Экран поворачивается с помощью шариков 26, которые могут быт выполнены стальными. Для обеспечения устойчивого положения экрана количество шариков должно быть не ме- нее трех. В отсутствие управляющих воздействий стержень 5 под действием пружины 4 и основание 8 под действием гофра 7 возвращаются в исходное положение.
Возможность получения трех сигналов с формированием в каждом канале измерительного блока зоны нечувствительности к начальным угловым перемещениям стержня, защищающей систему управления от ложных перемещений стержня, позволяет использовать преобразователь в качестве элемента органа управления подвижных объектов ответственного назначения, а обеспечение отсутствия перекосов экрана повышает точность измерения угловых перемещений по трем координатам.
Формула изобретения
1. Преобразователь угловых перемещений, содержащий разъемный диэлектрический корпус с секторным вырезом в одной из его стенок, размещенный в полости корпуса сферический шарнир и взаимодействующий с шарниром стержень звена связи с контролируемым объектом, проходящий через секторный вырез в стенке корпуса, вих- ретоковый датчик для измерения угловых перемещений по двум координатным осям, выполненный в виде двух пар катушек индуктивности, закрепленных в корпусе попарно симметрично относительно центра сферического шарнира, отличающий- с я тем, что, с целью расширения функциональных возможностей преобразователя за счет измерения угловых перемещений также и относительно третьей координатной оси, он снабжен третьей парой идентично выполненных первым двум парам катушек, индуктивности, соединенных дифференциально, электропроводным неферромагнитным экраном, выполненным в виде барабана с гофром по периферии одного из его оснований и сквозным отверстием для установки на его оси стержня звена связи,и двумя параллельно установленными ограничительными пластинами, которые размещены перпендикулярно оси стержня звена связи-и взаимно связаны с помощью соединительных штифтов, отверстие в первом основании экрана выполнено в виде участков окружности, диаметр которой превышает диаметр стержня звена связи, и двух пар диаметрально противоположно расположенных по первым двум координатным осям полукруглых пазов, на осях которых размещены соединительные штифты, отверстие во втором из оснований экрана выполнено профилированным в виде участков окружности, разделенных овоидами одинакового диаметра, полуоси симметрии ово- ид отличаются на одинаковые величины разных знаков от половины диаметра участков окружности этого отверстия, первые
две пары катушек индуктивности размещены напротив гофрированных участков первого основания экрана, а третья пара катушек индуктивности закреплена в корпусе напротив второго основания экрана со смещением относительно оси стержня звена связи, равным диаметру окружности отверстия в этом основании.
2, Преобразователь по п. 1, о т л и ч а ю- щ и и с я тем, что, с целью повышения
точности измерения угловых перемещений по трем координатным осям, корпус преобразователя выполнен разъемным в виде двух состыкованных открытыми торцами стаканообразных частей, в которых выполнен кольцевой паз прямоугольного сечения, и размещенных в них не менее трех опорных шариков,
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| Двухкоординатный преобразователь угловых перемещений | 1990 |
|
SU1784837A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1665224A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| Двухкоординатный преобразователь угловых перемещений | 1991 |
|
SU1837154A1 |
| Двухкоординатный преобразователь угловых перемещений | 1986 |
|
SU1379608A1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1670377A1 |
| Двухкоординатный преобразователь угловых перемещений | 2017 |
|
RU2653117C1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| Устройство для определения угла наклона | 1978 |
|
SU792074A1 |
Изобретение относится к измерительной технике. Цель - расширение функциональных возможностей преобразователя угловых перемещений с повышенной точностью. Преобразователь содержит разъемный диэлектрический корпус 1 с полостью, в которой размещен сферический шарнир 3 и взаимодействующий с ним стержень 5 зве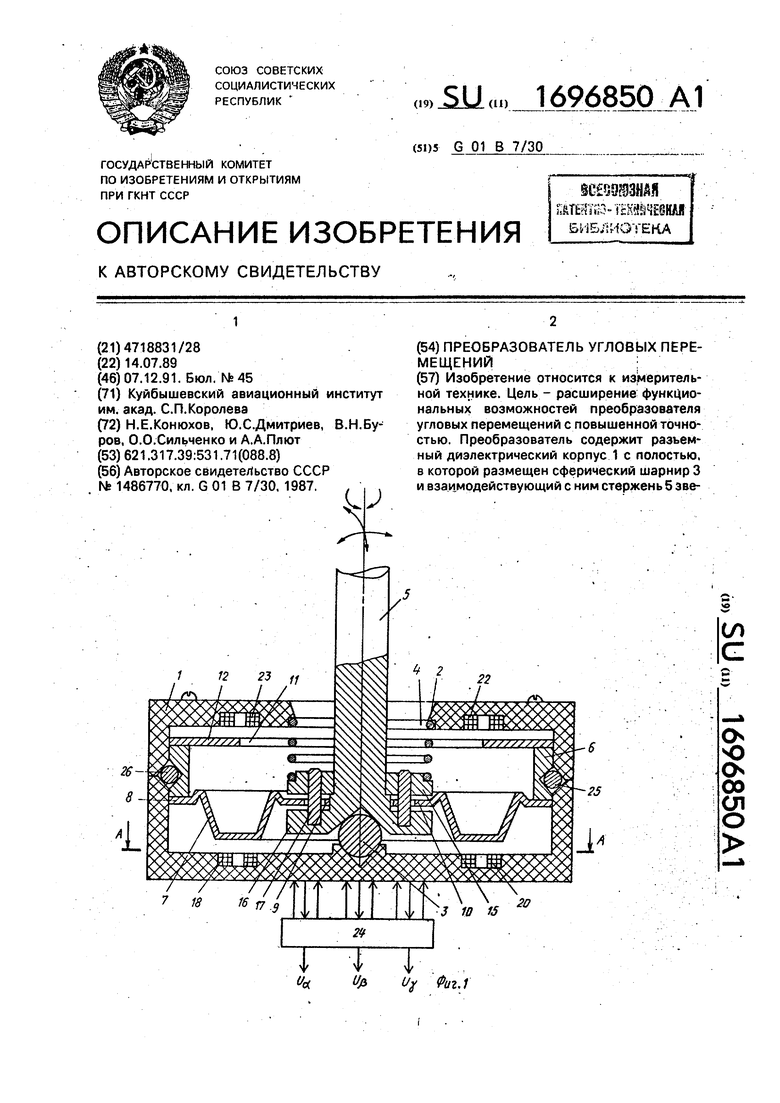
12
Ш
10
фиг. 2.
19
го
VJL
| Авторское свидетельство СССР № 1486770, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| V | |||
