Настоящее изобретение относится к электрической системе управления полетом для управления рулями высоты воздушного судна.
Известно, что в воздушных суднах с механическим управлением ручка управления непосредственно управляет углом отклонения рулей высоты, причем амплитуда этого угла пропорциональна наклону указанной ручки управления. Таким образом, воздействуя на указанную ручку управления, пилот прикладывает воздействие пилотирования, которое моментально устанавливает воздушное судно относительно его центра тяжести, или которое управляет положением указанного воздушного судна. Такое пилотирующее воздействие является инстинктивным для пилота.
Также известно, что электрические средства управления полетом, которыми в настоящее время оборудовано множество современных воздушных суден, позволяют управлять воздушным судном по цели, то есть непосредственно управлять параметром, таким как коэффициент перегрузки, с помощью указанной ручки управления, при этом все происходит так, как если бы последняя была градуирована по значениям коэффициента перегрузки. Такое управление является предпочтительным, поскольку градуировка ручки управления по значениям коэффициента перегрузки и с ограничением величины управляемого коэффициента перегрузки обеспечивает сохранение целостности воздушного судна при любом маневре.
С другой стороны, управление коэффициентом перегрузки является недостаточно инстинктивным для пилота, поскольку управление коэффициентом перегрузки позволяет управлять воздушным судном в долгосрочном плане, но не обеспечивает для пилота возможность мгновенного управления. В частности, подача команды нулевого коэффициента перегрузки приводит к предписанию постоянного аэродинамического наклона. Таким образом, с помощью ручки управления обеспечивается возможность управления воздушным судном путем управления его траекторией, что позволяет легко использовать указанное электрическое управление полетом либо с помощью пилота-человека, или с использованием автопилота.
Однако из приведенного выше следует, что на очень динамичных фазах полета, например рядом с землей, во время которых задачи управления становятся очень краткосрочными, становится необходимым заменить, например, управление, построенное по принципу коэффициента перегрузки, управлением скоростью по тангажу.
Кроме того, известные электрические средства управления, построенные по принципу коэффициента перегрузки, не позволяют интегрировать защиту воздушного судна в отношении продольного положения. Поэтому необходимо дополнительно встраивать в эту систему закон защиты на основе положения и точно сопрягать последний с электрическими средствами управления полетом, которые основаны на коэффициенте перегрузки, для исключения проблем, которые могут возникнуть рядом с землей, таких как касание хвостом (или удар хвостом).
Кроме того, также невозможно защитить воздушное судно по углу атаки исключительно на основе электрических средств управления, построенных на основе коэффициента перегрузки. Поэтому здесь снова необходимо добавлять дополнительный закон защиты на основе угла атаки и осуществлять искуссное взаимодействие для исключения риска сваливания воздушного судна во время стандартных маневров.
Задача настоящего изобретения состоит в исключении этих недостатков, и изобретение относится к электрическим средствам управления полетом, которые позволяют управлять воздушным судном как на основе коэффициента перегрузки в определенных условиях полета, так и на основе скорости по тангажу в других условиях и позволяют интегрировать защиту как в отношении коэффициента перегрузки, так и в отношении угла атаки и продольного положения.
С этой целью в соответствии с изобретением электрическая система управления полетом, предназначенная для управления с учетом коэффициента перегрузки рулями высоты воздушного судна, причем управление указанными рулями высоты осуществляется с помощью средства управления, обеспечивающего установку указанных рулей высоты в отклоненное положение, в зависимости от электрического сигнала δmc, который представляет управляемое значение угла δm отклоненияуказанных рулей высоты, характеризуется тем, что содержит:
- первое средство расчета, предназначенное для расчета, на основе электрического сигнала nzc, который представляет управляемое значение указанного коэффициента перегрузки, первого электрического сигнала  , представляющего управляемое значение производной по времени аэродинамического наклона γ указанного воздушного судна;
, представляющего управляемое значение производной по времени аэродинамического наклона γ указанного воздушного судна;
- первое составляющее устройство, которое:
может принимать на своем входе указанный первый электрический сигнал;
содержит первое средство защиты, которое может поддерживать указанный первый электрический сигналмежду минимальным значением и максимальным значением;
на основе указанного первого электрического сигнала определяет, по меньшей мере, второй электрический сигналαc, представляющий соответствующее управляемое значение угла α атаки, и третий электрический сигнал θc, представляющий соответствующее управляемое значение θ продольного положения;
содержит второе средство защиты, которое может поддерживать указанный второй электрический сигналαc между минимальным значением и максимальным значением; и
передает, по меньшей мере, указанный третий электрический сигнал θc на свой выход; и
- второе составляющее устройство, которое
может принимать на своем входе, по меньшей мере, указанный третий электрический сигнал θc или четвертый электрический сигнал θd, аналогичный указанному третьему электрическому сигналу θc;
содержит третье средство защиты, которое может поддерживать указанный третий или четвертый электрический сигнал между минимальным значением и максимальным значением; и
может передавать на свой выход пятый электрический сигнал, который составляет указанный сигналδmc, представляющий соответствующее управляемое значение угла δm отклоненияуказанных рулей высоты.
Предпочтительно система в соответствии с изобретением, содержит первое средство переключения, которое может принимать:
- либо первое положение, в котором выход указанного первого составляющего устройства подключен ко входу указанного второго составляющего устройства, так что указанный третий электрический сигнал θс затем передают в указанное второе составляющее устройство;
- или второе положение, в котором на вход указанного второго устройства поступает указанный четвертый электрический сигнал θd, аналогичный указанному третьему электрическому сигналу θс и сгенерированный на основе шестого электрического сигналаqd, представляющего требуемое значение q скорости по тангажу.
Следует отметить, что, как известно, коэффициент nz перегрузки равен V.  /g, причем в этом выражении V представляет скорость воздушного судна, g представляет ускорение силы тяжести и представляет производную аэродинамического наклона. Таким образом, легко преобразовать управляемый сигнал nzc коэффициента перегрузки в указанный первый электрический сигнал
/g, причем в этом выражении V представляет скорость воздушного судна, g представляет ускорение силы тяжести и представляет производную аэродинамического наклона. Таким образом, легко преобразовать управляемый сигнал nzc коэффициента перегрузки в указанный первый электрический сигнал  , тогда значение равноnzc.g/V.
, тогда значение равноnzc.g/V.
Предпочтительно указанное первое составляющее устройство определяет, кроме указанного второго электрического сигнала αc и указанного третьего электрического сигнала θC, седьмой электрический сигналqc, представляющий соответствующее управляемое значение скорости q по тангажу, и указанное первое средство переключения может передавать указанный седьмой электрический сигналqc в указанное второе составляющее устройство.
В упрощенном виде указанное первое составляющее устройство передает в качестве седьмого электрического сигналаqc приблизительное значение, равное значению указанного первого электрического сигнала .
В предпочтительном варианте выполнения электрической системы управления полетом в соответствии с настоящим изобретением указанная система содержит:
- автопилот, который может передавать сигнал nzc управляемого коэффициента перегрузки;
- элемент ручного пилотирования, который может передавать путем переключения либо сигналnzc управляемого коэффициента перегрузки, или указанный шестой электрический сигналqd, представляющий требуемое значение для скорости q по тангажу; и
- второе средство переключения, предназначенное для:
передачи в указанное первое составляющее устройство либо сигнала управляемого коэффициента перегрузки, передаваемого указанным автопилотом, или сигнала управляемого коэффициента перегрузки, передаваемого указанным элементом ручного пилотирования;
или, в противном случае, передачи указанного шестого электрического сигналаqd в первое средство интегрирования, которое позволяет формировать четвертый электрический сигнал θd, представляющий требуемое значение положения θ, причем указанное первое средство переключения может передавать в указанное второе составляющее устройство указанные четвертый и шестой электрические сигналыθd иqd вместо указанных третьего и седьмого электрических сигналовθC иqc, генерируемых указанным первым составляющим устройством.
Предпочтительно для определения указанного второго электрического сигнала αc на основе первого сигнала γc указанное первое составляющее устройство содержит второе средство расчета, выполняющее расчет выражения
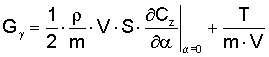
в которомFγ иGγ представляют функции состояния воздушного судна при

и

где g представляет собой ускорение силы тяжести, γ представляет собой аэродинамический наклон, V - скорость воздушного судна, ρ - плотность воздуха, m - массу воздушного судна, S - расчетную площадь воздушного судна, Czα=0 коэффициент подъемной силы воздушного судна для нулевого угла атаки,  - градиент аэродинамического коэффициента подъемной силы, как функцию угла атаки, и T - силу тяги воздушного судна.
- градиент аэродинамического коэффициента подъемной силы, как функцию угла атаки, и T - силу тяги воздушного судна.
Для формирования указанного третьего электрического сигнала θC указанное первое составляющее устройство может содержать второе средство интегратора, которое может интегрировать указанный седьмой электрический сигнал qc, и первый сумматор, предназначенный для формирования суммы интеграла, передаваемого указанным вторым средством интегратора, и указанного второго электрического сигнала αc.
Предпочтительно указанное второе составляющее устройство, либо на основе указанного третьего электрического сигнала θC и седьмого электрического сигналаqc, передаваемого из указанного первого составляющего устройства, или на основе указанного четвертого сигнала θd и указанного седьмого сигналаqd, передаваемого из указанного элемента ручного пилотирования, а также текущих значенийqr и θr скорости q по тангажу и продольного положения θ, определяет восьмой электрический сигнал  , представляющий соответствующее управляемое значение ускорения
, представляющий соответствующее управляемое значение ускорения  по тангажу, затем, на основе восьмого электрического сигнала указанное второе составляющее устройство определяет указанный пятый электрический сигнал δmc.
по тангажу, затем, на основе восьмого электрического сигнала указанное второе составляющее устройство определяет указанный пятый электрический сигнал δmc.
Предпочтительно указанное второе составляющее устройство рассчитывает указанный восьмой электрический сигнал , используя уравнение
 =К1.θv-К2.θr+K3.qv-K4.qr,
=К1.θv-К2.θr+K3.qv-K4.qr,
гдеθV представляет собой указанный третий или четвертый электрический сигнал,θr представляет текущее значение продольного положения θ,qv - указанный шестой или седьмой электрический сигнал,qr - текущее значение скорости q по тангажу, K1, K2, K3 и K4 представляют собой постоянные коэффициенты. Кроме того, для определения указанного пятого электрического сигнала δmc на основе указанного восьмого электрического сигнала , указанное второе составляющее устройство предпочтительно содержит третье средство расчета, которое выполняет расчет выражения
δmc=(-Fq)/Gq,
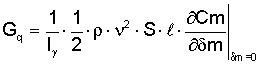
в которомFq иGq представляют собой функции состояния вождушного судна при

и
гдеIγ представляет собой инерцию по углу тангажа, ρ представляет плотность воздуха, V - скорость воздушного судна, S - расчетную площадь воздушного судна, l - расчетную длину воздушного судна,Cmδm=0 - коэффициент угла тангажа, T - силу тяги, b - плечо рычага двигателей, τ - угол продольного наклона двигателей и
 - эффективность рулей высоты.
- эффективность рулей высоты.
На приложенных чертежах представлены варианты выполнения, предназначенные для пояснения изобретения. На этих чертежах идентичными ссылочными позициями обозначены аналогичные элементы.
На фиг.1 показана схема примерного варианта выполнения электрической системы управления полетом в соответствии с настоящим изобретением.
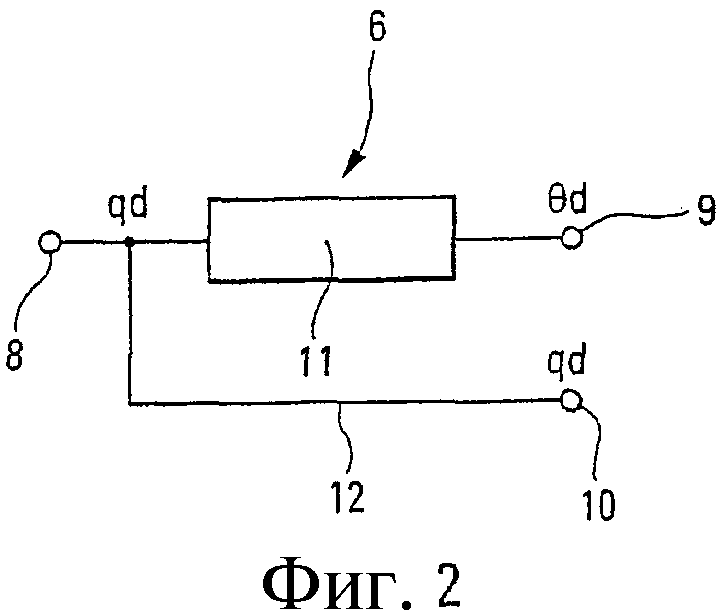
На фиг.2 показана схема интегрированного устройства, используемого в системе по фиг.1.
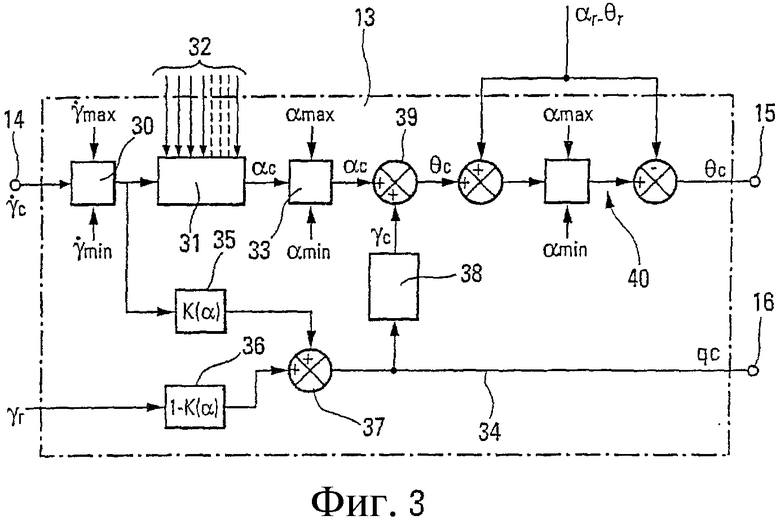
На фиг.3 показана схема первого составляющего устройства системы по фиг.1.
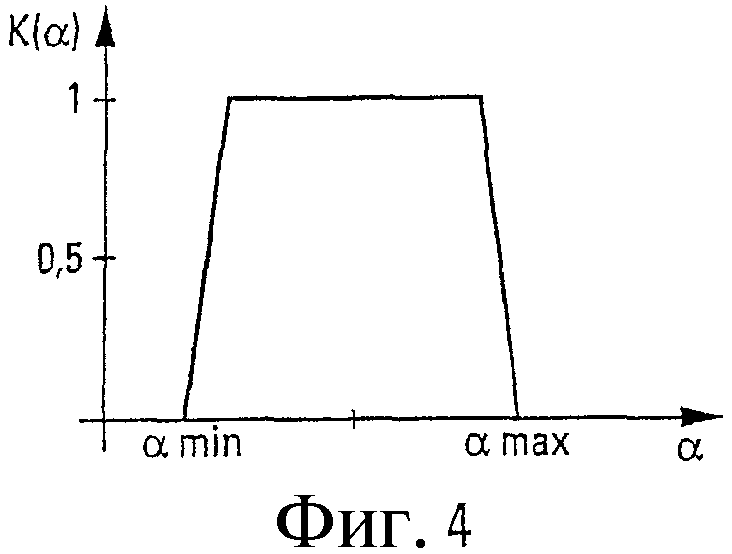
На фиг.4 представлена кривая усиления устройства по фиг.3.
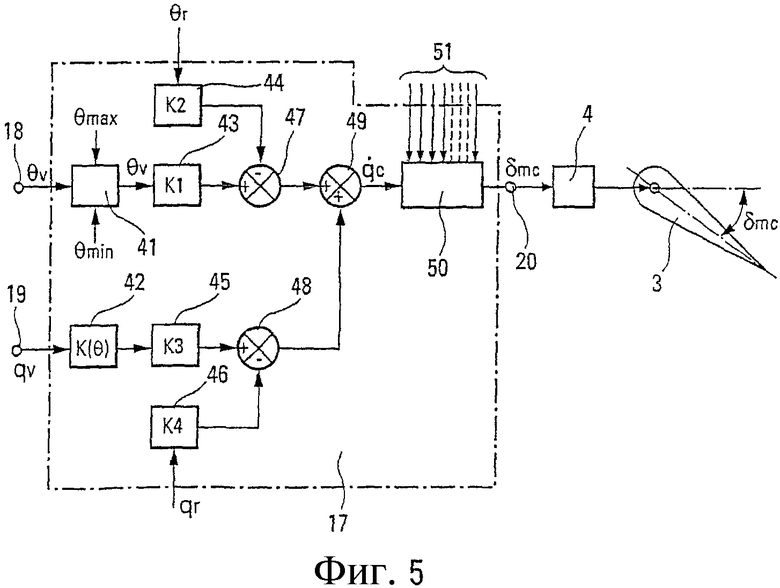
На фиг.5 показана схема второго составляющего устройства системы по фиг.1.
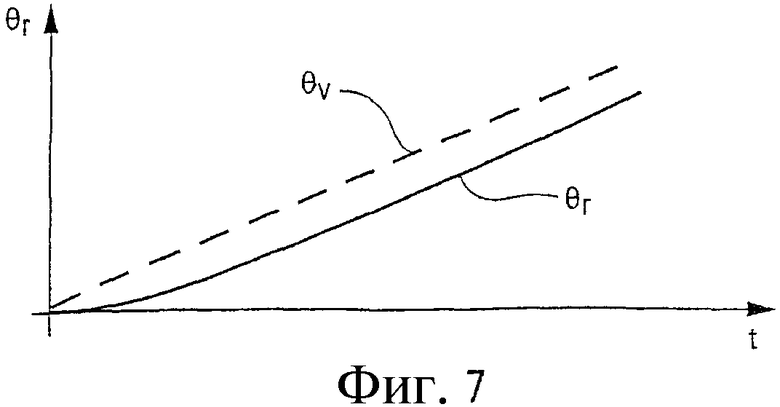
На фиг.6 и 7 показаны схемы, иллюстрирующие характеристику средства расчета второго составляющего устройства, выполняющего расчет восьмого электрического сигнала  .
.
В изображенном на схеме примерном варианте выполнения электрической системы управления полетом воздушного судна в соответствии с настоящим изобретением, показанном на фиг.1, представлены автопилот 1, система 2 ручки управления, поверхности 3 управления направлением и устройство 4, предназначенное для управления отклонением указанных поверхностей управления.
В данном примере предполагается, что автопилот 1 может подавать на свой выходной вывод 7 электрический сигналnzc управления, соответствующий управляемому значению коэффициента перегрузки, в то время как система 2 ручки управления позволяет генерировать на своем выходном выводе 24 электрический сигнал управления, соответствующий при переключении либо требуемому значениюqd скорости по тангажу, или управляемому значениюnzc коэффициента перегрузки. Кроме того, с одной стороны, предусмотрено средство расчета 5, позволяющее рассчитывать на основе управляемого значенияnzc электрический сигнал  , представляющий управляемое значение производной по времени аэродинамического наклона γ, и, с другой стороны, средство 6 интегрирования, позволяющее получать на основе указанного требуемого значенияqd электрический сигнал θd, представляющий требуемое значение продольного положения θ.
, представляющий управляемое значение производной по времени аэродинамического наклона γ, и, с другой стороны, средство 6 интегрирования, позволяющее получать на основе указанного требуемого значенияqd электрический сигнал θd, представляющий требуемое значение продольного положения θ.
Средство расчета 5 работает на основе соотношения
nz=V· /g,
/g,
связывающего коэффициент nz перегрузки и производную  аэродинамического наклона γ, причем V представляет скорость воздушного судна и g представляет собой ускорение силы тяжести. Таким образом, средство 5 расчета, в которое передают скорость V и ускорение g силы тяжести и которое получает управляемое значение nzc, определяет величину
аэродинамического наклона γ, причем V представляет скорость воздушного судна и g представляет собой ускорение силы тяжести. Таким образом, средство 5 расчета, в которое передают скорость V и ускорение g силы тяжести и которое получает управляемое значение nzc, определяет величину  , используя выражение
, используя выражение
 =nzc·g/V.
=nzc·g/V.
Средство 6 интегрирования, в свою очередь, содержит входной вывод 8 и два выходных вывода 9 и 10. Между выводами 8 и 9 расположен интегратор 11, в то время как соединение 12 соединяет выводы 8 и 10 (см. фиг.2). Таким образом, когда требуемое значениеqd скорости по тангажу подают на входной вывод 8, в результате интегрирования, выполняемого интегратором 11, получают требуемое значение продольного положенияθd на выходном выводе 9 и требуемое значение скорости qd по тангажуна выводе 10.
Как было описано выше и как показано на фиг.1, представленный здесь пример электрической системы управления полетом в соответствии с изобретением содержит:
- первое составляющее устройство 13, содержащее входной вывод 14, перед которым расположено средство расчета 5, и два выходных вывода 15 и 16;
- второе составляющее устройство 17, содержащее два входных вывода 18 и 19 и выходной вывод 20, причем последний выходной вывод управляет устройством 4;
- переключатель 21, который позволяет подключать входной вывод 27 средства расчета 5 либо к выходному выводу 7 автопилота 1, или к выводу 22;
- переключатель 23, который позволяет соединять выходной вывод 24 системы 2 ручки управления либо с указанным выводом 22, или со входным выводом 8 средства 6 интегрирования, причем указанный переключатель 23, кроме того, управляет переключением между сигналомqd скорости по тангажу и сигналомnzc на указанном выходном выводе 24; когда переключатель 23 соединяет выводы 24 и 8, при этом выходной сигнал системы 2 ручки управления представляет собой сигналqd; и, наоборот, когда переключатель 23 соединяет выводы 24 и 22, выходной сигнал системы 2 ручки управления представляет собой сигналnzc;
- переключатель 25, который позволяет соединять входной вывод 18 второго устройства 17 либо с выходным выводом 15 первого устройства 13, или с выходным выводом 9 средства 6 интегрирования; и
- переключатель 26, который позволяет соединять входной вывод 19 второго устройства 17 либо с выходным выводом 16 первого устройства 13, или с выходным выводом 10 средства 6 интегрирования.
Из приведенного выше можно видеть, что:
- когда переключатели 21, 25 и 26 соединяют соответственно выводы 27 и 7, 18 и 15 и 19 и 16, рулями 3 высоты управляют на основе автопилота 1, используя первое и второе устройства 13 и 17, при этом параметр управления представляет собой управляемое значениеnzc коэффициента перегрузки;
- когда переключатели 21, 23, 25 и 26 соединяют соответственно выводы 24 и 22, 22 и 27, 18 и 15 и 19 и 16, рулями 3 высоты управляют на основе системы 2 ручки управления с использованием первого и второго устройств 13 и 17, причем параметр управления представляет собой управляемое значение nzc указанного коэффициента перегрузки; и
- когда переключатели 23, 25 и 26 соединяют соответственно выводы 24 и 8, 18 и 9 и 19 и 10, рулями 3 высоты управляют на основе системы 2 ручки управления с использованием только второго устройства 17, при этом параметр управления представляет собой требуемую скорость по тангажу qd.
На фиг.3 показан пример варианта выполнения первого составляющего устройства 13. В этом примерном варианте выполнения первое устройство 13 содержит:
- устройство 30 защиты, например, типа схемы голосования, которая принимает сигналγc средства 5 расчета на выводе 14, которое не может защитить этот сигнал между максимальным значениемγmax и минимальным значениемγmin;
- калькулятор 31, принимающий сигнал γc устройства 30 защиты, а также множество сигналов 32 отклика и рассчитывающий (как описано ниже) управляемый угол αc атаки;
- устройство 33 защиты, например, типа схемы голосования, принимающее управляемый сигнал угла αc атаки и позволяющее защитить этот сигнал между максимальным значениемαmax и минимальнымαmin;
- соединение 34 между выходом устройства 30 защиты и выходным терминалом 16, причем указанное соединение 34 содержит устройство 35 коэффициента K(α) усиления, который изменяется как функция угла α атаки; следует отметить, что на выходе устройства 30 защиты появляется сигнал  , который равен разности между управляемой скоростью по тангажуqc и производной
, который равен разности между управляемой скоростью по тангажуqc и производной  управляемого угла атаки (фактически, θ=α+γ). Теперь производная управляемого угла атаки, как правило, содержит очень большое количество шумов, так что предпочтительно пренебречь ее значением; следовательно, производная управляемого наклона используется для оценки приблизительного значения управляемой скорости по тангажуqc. Как показано на фиг.4, коэффициент K (α) усиления всегда равен 1, за исключением случаев близости к αmin и αmax, где он уменьшается до нуля. Таким образом, получают защиту в отношении угла атаки;
управляемого угла атаки (фактически, θ=α+γ). Теперь производная управляемого угла атаки, как правило, содержит очень большое количество шумов, так что предпочтительно пренебречь ее значением; следовательно, производная управляемого наклона используется для оценки приблизительного значения управляемой скорости по тангажуqc. Как показано на фиг.4, коэффициент K (α) усиления всегда равен 1, за исключением случаев близости к αmin и αmax, где он уменьшается до нуля. Таким образом, получают защиту в отношении угла атаки;
- устройство 36 c коэффициентом усиления 1-K (α), получающее текущее значение аэродинамического наклона γr;
- сумматор 37 складывающий вместе выходные сигналы устройств 35 и 36 и передает полученный в результате сигнал на свой вывод 16; этот полученный в результате сигнал, таким образом, представляет в случаях, когда значение α находится далеко от αmin и αmax, иγr, когда значение α равноαmin илиαmax;
- интегратор 38, интегрирующий сигнал соединения 34 и, поэтому, формирующий управляемый наклон ;
- сумматор 39, складывающий вместе указанный управляемый наклон γс, полученный интегратором 38, и управляемый угол αс атаки, полученный из устройства 33 защиты, для получения управляемого положения θc и передачи его на вывод 15, возможно через дополнительное устройство 40 защиты на основе угла атаки, используя текущие значения αr иθr угла атаки и положения.
Работа калькулятора 31 основана на уравнении подъемной силы, которое может быть записано следующим образом
 =Fγ+Gγ.α
=Fγ+Gγ.α
причем в этом выраженииFγ иGγ представляют собой функции состояния воздушного судна при

и
где g представляет ускорение силы тяжести, γ - аэродинамический наклон, V - скорость воздушного судна, ρ - плотность воздуха, m - массу воздушного судна, S - расчетную площадь воздушного судна, Czα=0 - коэффициент подъемной силы воздушного судна для нулевого угла атаки, - градиент аэродинамического коэффициента подъемной силы как функцию угла атаки и T - силу тяги воздушного судна.
Сигналы 32 отклика, получаемые с помощью калькулятора 31, таким образом, состоят из параметров g, γ, V, ρ, m, S,Czα=0, и T, которые доступны на борту воздушного судна, что позволяет рассчитать значенияFγ иGY, после чего калькулятор 31 рассчитывает значениеαc, используя выражение

Таким образом, на выводах 15 и 16 первого составляющего устройства 13 получают, соответственно, значение управляемого положения θC и управляемой скорости по тангажуqc.
Как указано выше,сигнал θv управляемого положения на входном выводе 18 второго составляющего устройства 17 формируется либо по сигналу θC, который подаютс выходного вывода 15 первого составляющего устройства 13, или по сигналу θd, который получают от средства 6 интегрирования.
Аналогично, значение управляемой скорости по тангажу сигналаqv на входном выводе 19 указанного второго составляющего устройства 17 формируют либо по сигналуqc, который получают с выходного вывода 16 первого составляющего устройства 13, или по сигналу, θd, поступающему от средства 6 интегрирования.
Во втором составляющем устройстве 17 сигнал θV управляемого продольного положения передают в устройство 41 защиты, например, типа схемы голосования, которое поддерживает этот сигнал между минимальным значением θmin и максимальным значениемθmax. Управляемую скорость сигнала qv по тангажу, в свою очередь, передают в устройство 42 усиления, коэффициент K(θ) усиления которого всегда равен 1, за исключением тех случаев, когда θ находится близко к значениямθmin илиθmax, в которых значение K(θ) равно нулю (кривая коэффициента K(θ) усиления как функция θ аналогична кривой, показанной на фиг.4, для изменения K(α) как функции α).
На основе значенийθV (защищенных таким образом) иqv (передаваемых в устройство 42) составляющее устройство 17 содержит средство для расчета производной по времени qv, которое представляет управляемые значения ускорения угла тангажа. Это средство расчета содержит:
- устройство 43 коэффициента усиления с коэффициентом K1 усиления, принимающее сигнал θV устройства 41 защиты;
- устройство 44 коэффициента усиления с коэффициентом K2 усиления, принимающее текущее значениеθr продольного положения;
- устройство 45 коэффициента усиления с коэффициентом K3 усиления, принимающее сигналqv устройства 42;
- устройство 46 коэффициента усиления с коэффициентом K4 усиления, принимающее текущее значениеqr скорости q по тангажу;
- вычитатель 47, предназначенный для расчета разностиK1.θV -K2.θr;
- вычитатель 48, предназначенный для расчета разности K3.qv - K4.qr; и
- сумматор 49, предназначенный для расчета суммы
=К1·θv-К2·θr+K3·qv-K4·qr.
Следует отметить, что, используя преобразование Лапласа, эта сумма может быть записана следующим образом:
s2·θr=K1·θv-K2·θr+K3·sθv-K4·s·θr,
причем в этом выражении s представляет собой оператор Лапласа, так, что
θr/θv=(τ·s+1)·ω2/(s2+2·z·ω·s+ω2),
если принять K1=K2=ω2, K3=τ/ω2 и K4 - 2·z·ω.
Элементы 43-49 поэтом, ведут себя как фильтр второго порядка с угловой частотой ω собственных колебаний и затуханием z, с постоянным по времени изменением фазы первого порядка, равным τ.
На фиг.6 и 7, соответственно, представлены отклик показателей и отклик сближения с целевыми значениями такого фильтра как функция времени t.
Второе составляющее устройство 17, кроме того, содержит калькулятор 50, принимающий управляемое значение ускорения угла тангажа, сформированное элементами 43-49, а также множеством откликов 51, и рассчитывающий сигнал δmc.
Работа калькулятора 50 основана на том факте, что, как известно, ускорение угла тангажа воздушного судна представляет собой линейную функцию угла отклоненияδm рулей 3 высоты, которая может быть записана следующим образом:

и в этом выражении

и
гдеIy представляет собой инерцию угла тангажа, ρ - плотность воздуха, V - скорость воздушного судна, S - расчетную площадь воздушного судна, l - расчетную длину воздушного судна,Cmδm=0 - коэффициент угла тангажа, T - силу тяги, b - плечо рычага двигателей, t - угол продольного наклона двигателей и  - эффективность рулей высоты.
- эффективность рулей высоты.
Таким образом, отклики 51 содержатIγ, ρ, V, S, l,Cmδm=0, T, b, τ и , и калькулятор 50 рассчитывает выражение
δmc=(-Fq)/Gq.
Таким образом, можно видеть, что в соответствии с настоящим изобретением получают систему продольного электрического управления полетом с интегрированной защитой в отношении коэффициента перегрузки, угла атаки и продольного положения, причем в качестве параметра пилотирования можно выбрать коэффициент перегрузки или скорость по тангажу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНЕЧНОГО ПРИВЕДЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В ПРОДОЛЬНОЙ ПЛОСКОСТИ НА ОСНОВЕ КВАЗИОПТИМАЛЬНОГО ЗАКОНА НАВЕДЕНИЯ | 2020 |
|
RU2737840C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
Изобретение относится к области приборостроения и может быть использовано для управления полетом летательных аппаратов. Технический результат - повышение точности регулирования. Для достижения данного результата осуществляют управление рулями высоты воздушного судна по коэффициенту перегрузки. Причем рулями высоты управляют с помощью средства (4) управления, обеспечивающего установку указанных рулей высоты в положение отклонения, в зависимости от интегральных характеристик электрических сигналов, поступающих от датчиков контроля угла отклонения указанных рулей (4) высоты. 9 з.п. ф-лы, 7 ил.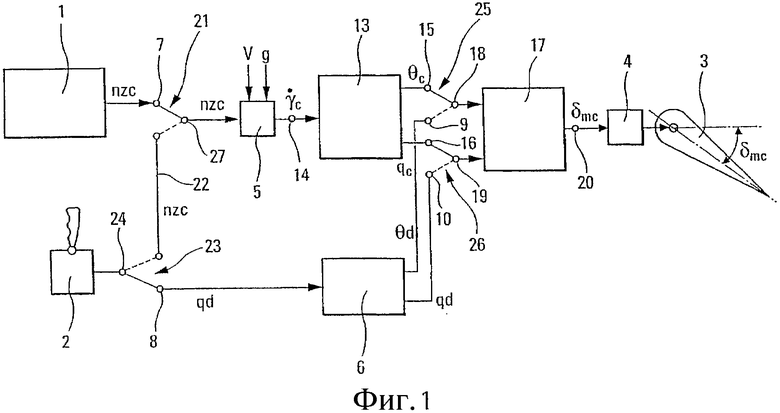
первое средство расчета, предназначенное для расчета, на основе электрического сигнала nzc, представляющего управляемое значение указанного коэффициента перегрузки, первого электрического сигнала  , представляющего управляемое значение производной по времени аэродинамического наклона
, представляющего управляемое значение производной по времени аэродинамического наклона  указанного воздушного судна;
указанного воздушного судна;
первое составляющее устройство (13), которое:
может принимать на своем входе (14) указанный первый электрический сигнал  ;
;
содержит первое средство защиты (30), которое может поддерживать указанный первый электрический сигнал между минимальным значением и максимальным значением;
на основе указанного первого электрического сигнала определяет, по меньшей мере, второй электрический сигнал αс, представляющий соответствующее управляемое значение угла α атаки, и третий электрический сигнал θC, представляющий соответствующее управляемое значение θ продольного положения;
содержит второе средство (33) защиты, которое может поддерживать указанный второй электрический сигнал αC между минимальным значением и максимальным значением; и
передает, по меньшей мере, указанный третий электрический сигнал θC на свой выход (15); и
второе составляющее устройство (17), которое
может принимать на своем входе (18), по меньшей мере, указанный третий электрический сигнал θC или четвертый электрический сигнал θd, аналогичный указанному третьему электрическому сигналу θC;
содержит третье средство защиты, которое может поддерживать указанный третий или четвертый электрический сигнал между минимальным значением и максимальным значением; и
может передавать на свой выход (20) пятый электрический сигнал, который составляет указанный сигнал δmc, представляющий соответствующее управляемое значение угла δm отклонения указанных рулей (4) высоты.
в которой система содержит первое средство переключения (25, 26), которое может принимать:
либо первое положение, в котором выход указанного первого составляющего устройства подключен ко входу указанного второго составляющего устройства, так что указанный третий электрический сигнал θC затем передают в указанное второе составляющее устройство;
или второе положение, в котором на вход указанного второго устройства поступает указанный четвертый электрический сигнал θd, аналогичный указанному третьему электрическому сигналу θC, и сгенерированный на основе шестого электрического сигнала qd, представляющего требуемое значение для скорости q по тангажу.
.автопилот (1), который может передавать сигнал nzc управляемого коэффициента перегрузки;
элемент (2) ручного пилотирования, который может передавать путем переключения либо сигнал nzc управляемого коэффициента перегрузки, или указанный шестой электрический сигнал qd, представляющий требуемое значение скорости q по тангажу; и
второе средство (21, 23) переключения, предназначенное для:
передачи в указанное первое составляющее устройство (13) либо сигнала управляемого коэффициента перегрузки, передаваемого указанным автопилотом, или сигнала управляемого коэффициента перегрузки, передаваемого указанным элементом ручного пилотирования;
или, в противном случае, передачи указанного шестого электрического сигнала qd в первое средство интегрирования (6), которое позволяет формировать четвертый электрический сигнал θd, представляющий требуемое значение и положения,
указанное первое средство (25, 26) переключения может передавать в указанное второе составляющее устройство (17) указанные четвертый и шестой электрические сигналы θd и qd вместо указанных третьего и седьмого электрических сигналов θC и qc, генерируемых указанным первым составляющим устройством.
в которой для определения указанного второго электрического сигнала αс на основе первого сигнала указанное первое составляющее устройство содержит второе средство расчета (31), выполняющее расчет выражения
αс=(-Fγ)/Gγ
в котором Fγ и Gγ представляют функции состояния воздушного судна при

и
где g представляет собой ускорение силы тяжести, у представляет собой аэродинамический наклон, V - скорость воздушного судна, ρ - плотность воздуха, m - массу воздушного судна, S - расчетную площадь воздушного судна, Czα=0 - коэффициент подъемной силы воздушного судна для нулевого угла атаки,  - градиент аэродинамического коэффициента подъемной силы, как функцию угла атаки, и Т - силу тяги воздушного судна.
- градиент аэродинамического коэффициента подъемной силы, как функцию угла атаки, и Т - силу тяги воздушного судна.
 , представляющий соответствующее управляемое значение ускорения
, представляющий соответствующее управляемое значение ускорения  по углу тангажа, затем на основе этого восьмого электрического сигнала
по углу тангажа, затем на основе этого восьмого электрического сигнала  указанное второе составляющее устройство определяет указанный пятый электрический сигнал δmc.
указанное второе составляющее устройство определяет указанный пятый электрический сигнал δmc.=К1·θv-К2·θr+K3·qv-K4·qr,
где θV представляет собой указанный третий или четвертый электрический сигнал, θr представляет текущее значение продольного положения θ, qv, - указанный шестой или седьмой электрический сигнал, qr - текущее значение скорости q по тангажу, К1, К2, К3 и К4 представляют собой постоянные коэффициенты.
, указанное второе составляющее устройство содержит третье средство расчета, которое выполняет расчет выраженияδmc=(-Fq)/Gq,
в котором Fq и Gq представляют собой функции состояния воздушного судна при

и
где Iy представляет собой инерцию по углу тангажа, ρ представляет плотность воздуха, V - скорость воздушного судна, S - расчетную площадь воздушного судна, l - расчетную длину воздушного судна, Cmδm=0 - коэффициент угла тангажа, Т - силу тяги, b - плечо рычага двигателей, τ - угол продольного наклона двигателей и  - эффективность рулей высоты.
- эффективность рулей высоты.
| ФОРСУНКА ТИПА КОЧСТАР | 2015 |
|
RU2656585C2 |
| КУРИТЕЛЬНОЕ ИЗДЕЛИЕ, ФИЛЬТР И СПОСОБ ИЗГОТОВЛЕНИЯ КУРИТЕЛЬНОГО ИЗДЕЛИЯ | 2015 |
|
RU2668750C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ОЧИСТКА ВОЗДУХА | 2017 |
|
RU2664231C1 |
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174 | |||
| Боднер В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |

