Изобретение относится к технике определения температуры короткозамкнутой обмотки ротора асинхронного двигателя под нагрузкой и может быть использовано при испытаниях асинхронных двигателей и регулировании их вращающего момента и частоты вращения в эксплуатации.
Известен способ для контроля температуры вращающихся элементов, в котором используют прибор для контроля температуры вращающихся роторов электродвигателей, в котором сигнал вращающегося датчика температуры передают индуктивным способом через вращающийся элемент связи на неподвижный элемент связи, причем элементы связи представляют собой индуктивные катушки, и обрабатывают вычислительным устройством, которое подключено непосредственно к неподвижному элементу связи - катушке - и установлено в узле, выполняющем функции датчика предельного значения температуры, а последний посылает переключающие импульсы низкой частоты и на подключенные электрические аппараты (Патент ФРГ №3007705, МКИ G01K 13/08, 1981).
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относится то, что в известном способе сигнал вращающегося датчика температуры передается индуктивным способом через вращающийся элемент связи, выполненный в виде индуктивной катушки, на неподвижный элемент связи, выполненный также в виде индуктивной катушки, которая установлена в узле датчика температуры, который посылает переключающие импульсы на подключенные аппараты, что значительно усложняет и удорожает конструкцию электрической машины и измерительных устройств. Поэтому этот способ не получил широкого применения в асинхронном электроприводе.
Наиболее близким способом того же назначения к заявленному изобретению по совокупности признаков является способ, включающий определение вычислительным устройством температуры короткозамкнутой обмотки ротора, используемой в качестве термодатчика, частоты тока статора, частоты вращения ротора, силы тока и напряжения фазы обмотки статора, подаваемого от инвертора, угла фазового сдвига между напряжением и током фазы обмотки статора с использованием источника постоянного тока с последовательно подключенным резистором и блоков измерения величин постоянного тока и падения напряжения от него на термодатчике, и включения параллельно этой цепи шунтирующего резистора, причем величины омических сопротивлений резисторов учитывают в определенном математическом соотношении (Авторское свидетельство СССР №1108337, кл. Н02К 3/00; Н02Н 5/04, 1981).
К принципиальным недостаткам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относится то, что в известном способе необходимо к обмотке электрической машины подключать последовательно источник постоянного тока и резистор, параллельно которым подключен шунтирующий резистор, и блоки измерения величин постоянного тока и падения напряжения от него на термодатчике (обмотке), что значительно усложняет и удорожает конструкцию электрической машины. Поэтому и этот способ не получил достаточно широкого применения, особенно для асинхронных двигателей, имеющих обмотку на роторе, выполненную в виде короткозамкнутой беличьей клетки.
Задачей предлагаемого способа является определение температуры нагрева обмотки вращающегося ротора по изменению электромагнитной постоянной времени обмотки ротора при ее нагреве и изменению взаимной индуктивности намагничивающей цепи с целью обеспечения непрерывного контроля температуры обмотки ротора в процессе работы без идентификационных моделей, удешевления его схемы и упрощения управления.
Поставленная задача решается тем, что в известном способе определения температуры обмотки короткозамкнутого ротора частотно-регулируемого асинхронного двигателя, включающем определение вычислительным устройством температуры короткозамкнутой обмотки ротора, используемой в качестве термодатчика, частоты тока статора, подаваемого от инвертора, частоты вращения ротора, силы тока и напряжения фазы обмотки статора, подаваемого от инвертора, угла фазового сдвига между напряжением и током фазы обмотки статора, введены отличия, заключающиеся в том, что температуру обмотки ротора в вычислительном устройстве определяют по изменению ее омического сопротивления, зависящего от температуры, и взаимной индуктивности намагничивающей цепи, которые связаны с электромагнитной постоянной времени обмотки ротора соотношением:
где R2 - омическое сопротивление обмотки ротора; Lm - взаимная индуктивность цепи намагничивания; Т - электромагнитная постоянная времени обмотки ротора, определяемая по формуле:
где |Z0| - модуль полного электрического сопротивления фазы обмотки статора; ω1 - угловая частота тока статора; R1 - активное сопротивление фазы обмотки статора; ωск - угловая частота скольжения ротора; σ2 - коэффициент рассеяния магнитного поля ротора; φ - фазовый угол сдвига между током и напряжением фазы обмотки статора, при этом превышение температуры Δt обмотки ротора относительно его известной температуры t0 определяется вычислительным устройством по соотношению:
где Т - электромагнитная постоянная времени обмотки ротора, измеренная в процессе штатной работы двигателя; Т0 - электромагнитная постоянная времени обмотки ротора, измеренная при известной эталонной температуре обмотки ротора t0, α - температурный коэффициент электрического сопротивления материала обмотки ротора (для меди он равен α=0,004), а текущее значение t температуры обмотки ротора определяется также в вычислительном устройстве по зависимости:
t=t0+Δt.
Исходные данные для указанных расчетов вводят в вычислительное устройство в виде сигналов от штатных приборов, датчиков системы управления частотно-регулируемым асинхронным электроприводом: частоты тока статора, частоты вращения ротора, силы тока и напряжения фазы обмотки статора, подаваемого от инвертора, угла фазового сдвига между напряжением и током фазы обмотки статора. Изменение взаимной индуктивности цепи намагничивания Lm или коэффициента ее насыщения kµ при насыщении магнитной цепи учитывают путем введения в программу обработки результатов измерения в их зависимости от тока статора. Полученные результаты используют для корректировки алгоритмов управления двигателем.
Описанный способ обеспечивает непрерывный контроль температуры обмотки ротора асинхронного двигателя в процессе работы без идентификационных моделей, удешевление его схемы и упрощение управления.
Предлагаемый способ измерения температуры обмотки короткозамкнутого ротора частотно-регулируемого асинхронного двигателя в процессе его работы реализуют структурной схемой, представленной на чертеже.
При этом используют имеющуюся текущую информацию о режимах работы частотно-регулируемого асинхронного двигателя с короткозамкнутым ротором: фазный ток, фазное напряжение, угол сдвига фазного тока относительно фазного напряжения, частота вращения ротора, частота тока статора и конструктивные параметры двигателя - индуктивность цепи намагничивания, омическое сопротивление фазной обмотки R1 и коэффициенты рассеяния магнитных полей статора σ1 и ротора σ2.
Способ осуществляется следующим образом (см. чертеж).
Задание на требуемый вращающий момент Мз подают в инвертор 1, который подключен к сети с напряжением Uc и питает электроэнергией обмотки статора 2. Штатные датчики: 3 - частоты тока статора ω1; 4 - частоты вращения ротора ωр; 5 - силы тока фазы статора; 6 - напряжения обмотки статора U1; 7 - величины угла фазового сдвига между напряжением и током фазы статора φ, подают информацию в вычислительное устройство температуры обмотки ротора 8, в которое также подают сигналы о величине сопротивления фазной обмотки R1, величине индуктивности цепи намагничивания статора σ1 и поля ротора σ2 и величине эталонной электромагнитной постоянной времени обмотки ротора Т0.
При этом вычислительным устройством определяют температуру короткозамкнутой обмотки ротора, используемой в качестве термодатчика, частоту тока статора, частоту вращения ротора, силу тока и напряжения фазы обмотки статора, подаваемого от инвертора, угла фазового сдвига между напряжением и током фазы обмотки статора, а температуру обмотки ротора в вычислительном устройстве определяют по изменению ее омического сопротивления, зависящего от температуры, и взаимной индуктивности намагничивающей цепи, которые связаны с электромагнитной постоянной времени ротора соотношением:
где R2 - омическое сопротивление обмотки ротора; Lm - взаимная индуктивность цепи намагничивания; Т - электромагнитная постоянная времени обмотки ротора, определяемая по формуле:
где |Z0| - модуль полного электрического сопротивления фазы обмотки статора; ω1 - угловая частота тока статора; R1 - активное сопротивление фазы обмотки статора; ωск - угловая частота скольжения ротора; σ2 - коэффициент рассеяния магнитного поля ротора; φ - фазовый угол сдвига между током и напряжением фазы обмотки статора.
Превышение температуры обмотки ротора относительно известной температуры t0 определяют вычислительным устройством по соотношению:
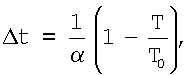
где Т - электромагнитная постоянная времени обмотки ротора, измеренная в процессе штатной работы двигателя; Т0 - электромагнитная постоянная времени обмотки ротора, измеренная при известной температуре; α - температурный коэффициент электрического сопротивления материала обмотки ротора (для меди он равен α=0,004). При этом текущее значение температуры обмотки ротора определяется по формуле:
t=t0+Δt.
Предлагаемый способ использует имеющиеся в схеме управления частотно-регулируемого асинхронного двигателя датчики и блоки и требует установки дополнительно только невращающегося вычислительного устройства температуры обмотки ротора 8, что значительно упрощает конструкцию. При этом обеспечивается простота средств и алгоритма реализации способа, а также необходимая точность измерения температуры t обмотки ротора.
Функции вычислителя могут быть реализованы программно, если блок управления преобразователем выполнен на базе микропроцессоров, в виде программного блока, входящего в общее программное обеспечение.
Полученные результаты используют для корректировки алгоритмов управления двигателем. Предложенный способ обеспечивает непрерывный контроль температуры обмотки ротора асинхронного двигателя в процессе работы без идентификационных моделей, удешевление его схемы и упрощение управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ ВРЕМЕНИ КОРОТКОЗАМКНУТОГО РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2374752C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2008 |
|
RU2402866C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОЙ ИНДУКТИВНОСТИ ЦЕПИ НАМАГНИЧИВАНИЯ ЧАСТОТНО-РЕГУЛИРУЕМОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2420748C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ И РАБОЧИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ БЕЗ СОПРЯЖЕНИЯ С НАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2391680C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
Заявленное изобретение относится к технике определения температуры короткозамкнутой обмотки ротора асинхронного двигателя под нагрузкой. Особенностью данного способа является то, что температуру нагрева обмотки вращающегося ротора определяют по изменению электромагнитной постоянной времени (Т) обмотки ротора при ее нагреве и изменению взаимной индуктивности (Lm) намагничивающей цепи, которые связаны с омическим сопротивлением (R2), зависящим от температуры, соотношением: 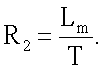 Описанный способ обеспечивает непрерывный контроль температуры обмотки ротора асинхронного двигателя в процессе работы без идентификационных моделей и упрощение управления. 1 ил.
Описанный способ обеспечивает непрерывный контроль температуры обмотки ротора асинхронного двигателя в процессе работы без идентификационных моделей и упрощение управления. 1 ил.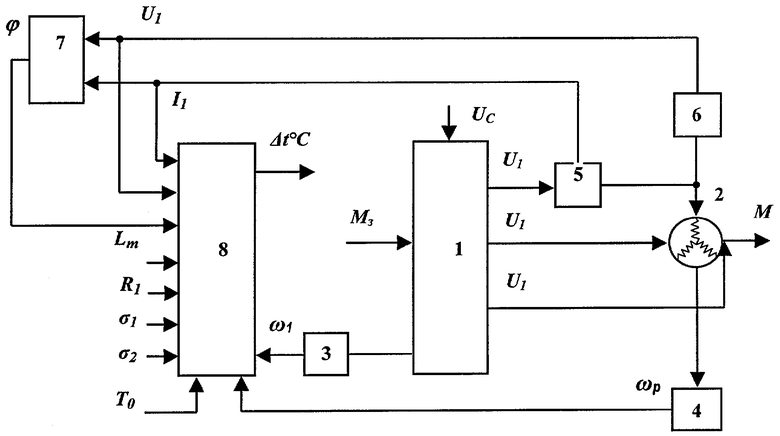
Способ бесконтактного определения температуры обмотки короткозамкнутого ротора частотно-регулируемого асинхронного двигателя, включающий определение вычислительным устройством температуры короткозамкнутой обмотки ротора, используемой в качестве термодатчика, частоты тока статора, частоты вращения ротора, силы тока и напряжения фазы обмотки статора, подаваемого от инвертора, угла фазового сдвига между напряжением и током фазы обмотки статора, отличающийся тем, что температуру обмотки ротора в вычислительном устройстве определяют по изменению ее омического сопротивления, зависящего от температуры, и взаимной индуктивности намагничивающей цепи, которые связаны с электромагнитной постоянной времени обмотки ротора соотношением:
где R2 - омическое сопротивление обмотки ротора; Lm - взаимная индуктивность цепи намагничивания; Т - электромагнитная постоянная времени обмотки ротора, определяемая по формуле:
где |Z0| - модуль полного электрического сопротивления фазы обмотки статора; ω1 - угловая частота тока статора; R1 - активное сопротивление фазы обмотки статора; ωск - угловая частота скольжения ротора; σ2 - коэффициент рассеяния магнитного поля ротора; φ - фазовый угол сдвига между током и напряжением фазы обмотки статора, при этом превышение температуры обмотки ротора относительно его известной температуры t0 определяется вычислительным устройством по соотношению:
где Т - электромагнитная постоянная времени, измеренная в процессе штатной работы двигателя; Т0 - электромагнитная постоянная времени обмотки ротора, измеренная при известной температуре обмотки ротора t0, α - температурный коэффициент электрического сопротивления материала обмотки ротора, а текущее значение температуры обмотки ротора определяется также в вычислительном устройстве по зависимости:
t=t0+Δt.
| Способ автоматического включения резерва сети | 1981 |
|
SU1247988A1 |
| Устройство для измерения превращения температуры обмотки электрической машины переменного тока под нагрузкой по измерению сопротивления обмотки постоянному току | 1977 |
|
SU609163A1 |
| Устройство для измерения превышения температуры обмотки электрической машины переменного тока под нагрузкой | 1978 |
|
SU780098A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1995 |
|
RU2110050C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1995 |
|
RU2110050C1 |

