Изобретение относится к измерительным комплексам и системам летательных аппаратов (ЛА) - самолетов и вертолетов.
В наиболее близком аналоге, приведенном в книге [1] на стр.352, представлена прицельная система (ПС) летательного аппарата. ПС включает в себя бортовые средства обнаружения, бортовые средства сопровождения, вычислитель и блок индикации. Летчик по индикатору либо по наблюдаемой визуально цели пилотирует ЛА так, чтобы вывести его в исходное положение для атаки, при этом бортовые средства сопровождения захватывают цель. После этого начинается процесс прицеливания, заключающийся в том, что на основе информации о движении цели и ЛА вычислитель определяет суммарную поправку, которая выдается на экран блока индикации в виде отклоненной от направления на цель прицельной марки (ПМ). Летчик пилотирует ЛА так, чтобы совместить ПМ с отметкой цели (ОЦ). При совмещении ПМ и ОЦ задача прицеливания решена и можно осуществлять стрельбу.
Наиболее близкий аналог имеет существенный недостаток, заключающийся в том, что успех и качество решения задачи прицеливания в значительной мере определяются качеством пилотирования, что при большой динамике ПМ и ОЦ на экране блока индикации в условиях скоротечного боя может приводить к большим погрешностям в прицеливании и соответственно снижениям эффективности и даже срывам выполнения полетного задания.
Задачей изобретения является расширение функциональных возможностей ПС ЛА за счет автоматизации процесса прицеливания и, как следствие этого, повышение боеготовности и эффективности использования объектов, снабженных такой системой.
Достигается указанный результат тем, что прицельная система, содержащая блок средств обнаружения и сопровождения (БОС) и баллистический вычислитель (БВ), дополнительно снабжена базой данных целей (БДЦ), блоком формирования прицельных параметров (БФПП) и блоком формирования заданных параметров (БФЗП) движения ЛА. При этом четыре входа БФЗП соединены с выходами БОС, БВ, БДЦ и бортовой информационной системы (БИС), входы блока БФПП соединены с выходами БФПП и БИС, а выход блока БФЗП, являющийся выходом прицельной системы ЛА, соединен с входом комплексной системы управления (КСУ) ЛА, основу которой составляет система автоматического управления ЛА.
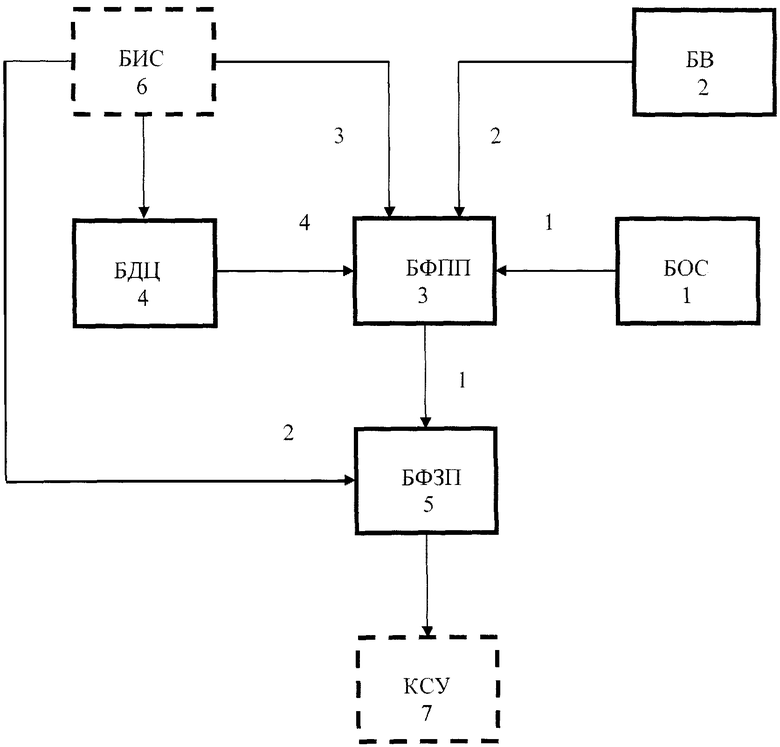
На чертеже представлена блок-схема прицельной системы ПС ЛА, содержащей:
1 - блок средств обнаружения и сопровождения БОС;
2 - баллистический вычислитель БВ;
3 - блок формирования прицельных параметров БФПП;
4 - база данных целей БДЦ;
5 - блок формирования заданных параметров БФЗП.
На чертеже показаны также блоки, не входящие в состав ПС ЛА:
6 - внешняя бортовая информационная система БИС;
7 - комплексная система управления КСУ ЛА.
Информационная взаимосвязь блоков ПС ЛА осуществляется по линиям информационного обмена (на чертеже обозначены тонкой сплошной линией).
Выход блока БОС 1 подключен к первому входу блока БФПП 3, выход блока БВ 2 подключен к второму входу блока БФПП 3, выход блока БДЦ 4 подключен к четвертому входу блока БФПП 3, выход блока БФПП 3 подключен к первому входу блока БФЗП 5. Выходы блока БИС 6 подключены к входу блока БДЦ 4, второму входу блока БФЗП 5 и третьему входу блока БФПП 3. Выход блока БФЗП 5, являющийся выходом ПС ЛА, подключен к входу КСУ 7.
Блок БОС 1 представляет собой известные, описанные в литературе, например [1], стр.358-375, средства: оптико-локационная станция (ОЛС), тепловизионная станция с автоматическим сопровождением цели (ТВС), радиолокационная станция (РЛС), радио- или оптический дальномер. Блок БОС 1 осуществляет обнаружение в пространстве цели, ее захват цели и автоматическое сопровождение, при этом определяются параметры относительных координат цели относительно ЛА (например, в виде дальности D до цели и углов φy и φz поворота линии визирования относительно нормальной и боковой осей ЛА соответственно), которые подаются на вход БФПП 3.
Блок БДЦ 4 выполнен в виде, например, оперативного или постоянного
запоминающего устройства ([2], стр.30). Блоки БВ 2, БФПП 3, БФЗП 5 выполнены, например, в виде однопроцессорных вычислителей ([2], стр.31).
Блок БИС 6 представляет собой известную информационную систему, например инерциальную навигационную систему, описанную в литературе, например [3]. Блок БИС 6 осуществляет определение параметров движения ЛА: координат, скорости, углов ориентации.
КСУ 7 представляет собой известную систему управления ЛА, описанную в литературе, например [4].
Информационные линии связи представляют собой известные (описанные, например, в книге [2], стр.21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
ПС ЛА работает следующим образом. При прицеливании по оперативно обнаруженной цели блок БОС 1 после обнаружения цели осуществляет точное определение относительных координат цели относительно ЛА и автоматическое слежение за целью, при этом относительные координаты непрерывно уточняются. Эти относительные координаты, например, в виде дальности D до цели и углов φy и φz поворота линии визирования цели поступают на первый вход блока БФЗП 3. На другой вход блока БФЗП 3 из блока БВ 2 поступают баллистические поправки этих координат, например, в виде угловых поправок Δφy и Δφz, рассчитанных в зависимости от вида применяемого оружия, параметров движения ЛА и цели по известным алгоритмам, описанным в литературе, например [1], стр.204-241. На третий вход блока БФЗП 3 поступают параметры движения ЛА, например координаты : долгота λ, широта φ, высота Н, скорость υ, углы ориентации - курс ψ, тангаж ϑ, крен γ, определяемые в блоке БИС 6 по известным алгоритмам, описанным в литературе, например [3].
В блоке БФПП 3 рассчитываются углы  и
и  , поправленные на величины Δφy и Δφz значения углов визирования φy и φz:
, поправленные на величины Δφy и Δφz значения углов визирования φy и φz:

Эти величины с выхода блока БФПП 3 поступают на первый вход блока БФЗП 5. В блоке БФЗП 5 осуществляется расчет заданных параметров движения ЛА, например углов ориентации: курса ψзад, тангажа ϑзал и крена γзад. Для этого может быть использован, например, следующий алгоритм:
где М11, М12, M13, М23, М33 - элементы матрицы М направляющих косинусов от географического координатного трехгранника OENH к требуемому положению связанного с ЛА трехгранника Oxyz, которые, в свою очередь, отыщутся как:

Рассчитанные значения углов ψзад, ϑзад и γзад отрабатываются КСУ, при этом непрерывность слежения визирной линией блока БОС 1 за целью и работы блока БИС 6 гарантируют непрерывность слежения ЛА за требуемым направлением поправленной линии визирования, что, в свою очередь, гарантирует непрерывность прицеливания. Отработка углов ψзад, ϑзад и γзад означает решение задачи собственно прицеливания и позволяет открывать стрельбу по цели.
При прицеливании по программно заданной цели (как правило, наземной) блок БДЦ 4 на основе записанных значений координат цели и поступающих на вход блока БДЦ 4 с выхода блока БИС 6 координат ЛА осуществляет точный расчет относительных координат цели относительно ЛА, например, в виде дальности D до цели и углов φy и φz поворота линии визирования цели. Этот расчет ведется непрерывно, постоянно уточняя относительные координаты цели. Относительные координаты, например, в виде дальности D до цели и углов φy и φz поворота линии визирования цели поступают на четвертый вход блока БФПП 3. На второй вход блока БФПП 3 из блока БВ 2 поступают баллистические поправки этих координат, например, в виде угловых поправок Δφy и Δφz, рассчитанных в зависимости от вида применяемого оружия, параметров движения ЛА и цели по известным алгоритмам, описанным в литературе, например [1], стр.204-241. На третий вход блока БФПП 3 поступают параметры движения ЛА, например координаты : долгота λ, широта φ, высота Н, скорость υ, углы ориентации - курс ψ, тангаж ϑ, крен γ, определяемые в блоке БИС 6 по известным алгоритмам, описанным в литературе, например [3]. В блоке БФПП 3 рассчитываются углы и , поправленные на величины Δφy и Δφz значения углов визирования φy и φz:
В блоке БФЗП 5 осуществляется расчет заданных параметров движения ЛА, например углов ориентации: курса ψзад, тангажа ϑзад и крена γзад. Для этого может быть использован, например, вышеприведенный алгоритм.
Введение в состав ПС ЛА блоков БДЦ 4, БФПП 3, БФЗП 5 обеспечивает простое и эффективное автоматическое определение требуемых параметров движения ЛА при прицеливании. При этом устраняются отмеченные выше недостатки наиболее близкого аналога, так как задача прицеливания решается полностью автоматически и качество ее решения не зависит от человеческого фактора. Происходит разгрузка экипажа (особенно одноместных ЛА) на ответственнейшем этапе полетного задания, что позволяет экипажу, не снижая качества прицеливания, сосредоточиться на решении других задач, в частности обороны от атакующего противника. Это существенно повышает безопасность экипажа, боеготовность летательного аппарата и эффективность выполнения полетных заданий.
На примерах технической реализации показано достижение технического результата в части расширения функциональных возможностей прицельной системы ПС ЛА, а именно решение задачи прицеливания в автоматическом режиме, вследствие чего повышается безопасность экипажа, боеготовность и эффективность применения объектов, оснащаемых ПС ЛА.
ЛИТЕРАТУРА.
1. Гришутин ВГ. Лекции по авиационным прицельным системам стрельбы. - Киев.: КВВАИУ, 1980 г.
2. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г.
3. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.
4. Системы автоматического управления самолетом. И.А.Михалев, Б.Н.Окоемов, М.С.Чикулаев. 2-е изд., перераб. и доп. - М.: Машиностроение, 1987 г. - 240 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЗОРНО-ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2391262C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2407977C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННО-ПРИЦЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2451907C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК ВЫСОКОТОЧНЫХ СИСТЕМ СОПРОВОЖДЕНИЯ АВИАЦИОННЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093853C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
Изобретение относится к авиации и предназначено для автоматического решения задачи прицеливания по наземным и воздушным, программным и оперативным целям. В состав прицельной системы входят блок средств обнаружения и сопровождения целей, баллистический вычислитель, база данных целей, блок формирования прицельных параметров и блок формирования заданных параметров движения ЛА. Блок средств обнаружения и сопровождения обнаруживает оперативную цель, осуществляет ее сопровождение и определяет текущие значения относительных координат цели. Для программной цели текущие значения относительных координат рассчитываются в базе данных целей по запрограммированным параметрам цели и поступающим от внешней бортовой информационной системы текущим значениям параметров движения ЛА. Определенные таким образом текущие значения относительных координат целей поступают в блок формирования прицельных параметров, в который также поступают рассчитанные в баллистическом вычислителе значения угловых поправок. Рассчитанные прицельные параметры поступают в блок формирования заданных параметров движения ЛА, в который также поступают измеренные внешней бортовой информационной системой значения текущих параметров движения ЛА. Блок формирования заданных параметров движения ЛА по этой информации рассчитывает требуемые значения параметров движения ЛА, которые затем поступают в комплексную систему управления ЛА. Тем самым осуществляется автоматическое приведение ЛА в положение, требуемое для точного поражения цели. Изобретение обеспечивает простое и эффективное автоматическое определение параметров движения ЛА при прицеливании. При этом задача прицеливания решается полностью автоматически и качество ее решения не зависит от человеческого фактора. 1 ил.
Прицельная система летательного аппарата, содержащая блок средств обнаружения и сопровождения, баллистический вычислитель, блок формирования прицельных параметров, причем выход блока средств обнаружения и сопровождения подключен к первому входу блока формирования прицельных параметров, выход баллистического вычислителя подключен ко второму входу блока формирования прицельных параметров, отличающаяся тем, что прицельная система летательного аппарата дополнительно снабжена базой данных целей и блоком формирования заданных параметров движения летательного аппарата, причем третий вход блока формирования прицельных параметров и вход базы данных целей подключены к соответствующим выходам внешней бортовой информационной системы, четвертый вход блока формирования прицельных параметров подключен к выходу базы данных целей, выход блока формирования прицельных параметров подключен к первому входу блока формирования заданных параметров движения летательного аппарата, второй вход которого подключен к соответствующему выходу внешней бортовой информационной системы, выход блока формирования заданных параметров движения летательного аппарата, являющийся выходом прицельной системы летательного аппарата, подключен к входу комплексной системы управления.
| ПРИЦЕЛЬНАЯ СИСТЕМА | 1998 |
|
RU2129696C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2005 |
|
RU2282156C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2004 |
|
RU2263881C1 |

