Изобретение относится к измерительным комплексам и системам летательных аппаратов (ЛА) - самолетов и вертолетов.
Наиболее близкие аналоги - комплексные системы (КС), приведенные в книгах [3] (стр.6-16, 391-507) и [1] (стр.354-357), включают в себя базовую навигационную систему, вычислитель, обзорно-прицельные средства, средства связи, средства индикации и управления.
Базовая навигационная система (как правило, платформенная или бесплатформенная инерциальная навигационная система, курсовертикаль и система воздушных сигналов, работающие в автономном и корректируемом режимах), осуществляет формирование навигационных параметров ЛА: координат, скорости, курса, углов ориентации. Эти данные используются в вычислителе при решении задач общего самолетовождения, навигации, информационного обеспечения решения задач прицеливания и задач групповых действий. В частности, формируется вектор  положения ЛА относительно земной системы координат.
положения ЛА относительно земной системы координат.
Обзорно-прицельные средства (оптико-локационная станция, радиолокационная станция, дальномер) осуществляют формирование относительных координат цели (ориентира) относительно ЛА: наклонной дальности и углов визирования. Эти данные используются в вычислителе при решении задач прицеливания, в частности для определения географических координат цели (ориентира):

где  - вектор положения цели (ориентира) относительно земной системы координат;
- вектор положения цели (ориентира) относительно земной системы координат;
 - вектор положения ЛА относительно земной системы координат;
- вектор положения ЛА относительно земной системы координат;
 - вектор относительного положения цели (ориентира) относительно ЛА.
- вектор относительного положения цели (ориентира) относительно ЛА.
Средства связи осуществляют обмен информацией между ЛА при их совместных и групповых действиях. В частности, осуществляется обмен данными о значениях векторов (i - номер ЛА внутри группы), каждый из которых формируется навигационной системой i-го ЛА. Эти данные используются в вычислителе i-го ЛА для формирования вектора  относительного положения i-го и j-го ЛА, который используется при решении задач групповых действий:
относительного положения i-го и j-го ЛА, который используется при решении задач групповых действий:

В частности, вычисленные параметры используются при групповом вождении для индикации всех ЛА группы на индикаторах тактической обстановки i-го ЛА.
Наиболее близкий аналог имеет ряд существенных недостатков:
- точность определения географических координат ЛА полностью определяется погрешностями базовой навигационной системы данного ЛА, которые могут достигать значительных величин;
- точность определения географических координат цели (ориентира) зависит от точности определения географических координат ЛА, на борту которого они определяются;
- точность определения относительных координат двух ЛА зависит от точности определения географических координат на каждом ЛА;
- точность определения географических координат каждого ЛА в составе группы различна - для одних ЛА она может быть высокой, а для других низкой.
Задачей изобретения является устранение указанных недостатков, а именно:
- повышение точности определения координат каждого ЛА;
- повышение точности определения географических координат целей (ориентиров);
- повышение точности определения относительных координат любых пар ЛА в составе группы;
- обеспечение равной точности определения координат ЛА группы.
Достигается указанный результат тем, что комплексная система, содержащая подключенные к магистрали информационного обмена базовую навигационную систему, блок обзорно-прицельных средств обнаружения и сопровождения целей, блок средств связи, блок формирования навигационных параметров, дополнительно снабжена подключенными к магистрали информационного обмена блоком управления, блоком формирования координат ориентира, блоком формирования координат ЛА, блоком памяти.
На чертеже представлена блок-схема комплексной навигационно-прицельной системы (КНПрС) ЛА, содержащей:
1 - базовую навигационную систему БНС;
2 - блок обзорно-прицельных средств БОПС;
3 - блок средств связи БСС;
4 - блок формирования навигационных параметров БФНП;
5 - блок управления БУ;
6 - блок формирования координат ориентира БФКОР;
7 - блок формирования координат ЛА БФКЛА;
8 - блок памяти БП.
Информационная взаимосвязь блоков КНПрС осуществляется посредством магистрали информационного обмена МИО 9.
Входы/выходы блоков БНС 1, БОПС 2, БСС 3, БФНП 4, БУ 5, БФКОР 6, БФКЛА 7, БП 8 подключены к МИО 9.
Блок БНС 1 представляет собой известные, описанные в литературе, например [3], стр.6-9, 301-374, [4], стр.110-120, средства: инерциальная навигационная система (ИНС), бесплатформенная ИНС (БИНС), курсовоздушная навигационная система. При этом указанные системы могут работать как в автономном режиме, так и в корректируемом режиме, например, с помощью встроенного приемника спутниковой навигации. В последнем случае обеспечивается высокая точность определения параметров движения ЛА. Блок БНС 1 осуществляет определение параметров движения ЛА: координат, скорости, углов ориентации.
Блок БОПС 2 представляет собой известные, описанные в литературе, например [1], стр.358-375, средства: оптико-локационная станция (ОЛС), тепловизионная станция с автоматическим сопровождением цели (ТВС), радиолокационная станция (РЛС), радио- или оптический дальномер. Блок БОПС 2 осуществляет обнаружение в пространстве цели (ориентира), ее захват и автоматическое сопровождение, при этом определяются параметры относительных координат цели (ориентира) относительно ЛА (например, в виде дальности D до цели (ориентира) и углов φy и φz поворота линии визирования относительно нормальной и боковой осей ЛА соответственно).
Блок БСС 5 обеспечивает информационный обмен между ЛА группы. Блок представляет собой многоканальный комплекс средств связи (см. [4], стр.241) для ведения устойчивой двусторонней связи членов экипажа с командно-диспетчерским пунктом и между ЛА в воздухе, а также для обмена тактической информацией между ЛА при ведении групповых действий.
Блоки БФНП 4, БУ 5, БФКОР 6, БФКЛА 7 выполнены в виде, например, однопроцессорных вычислителей ([2], стр.31).
Блок БП 8 выполнен в виде, например, оперативного или постоянного запоминающего устройства ([2], стр.30).
Информационные линии связи представляют собой известные (описанные, например, в книге [2], стр.21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
КНПрС одиночного ЛА работает следующим образом.
Система БНС 1 осуществляет измерение и расчет параметров движения ЛА, которые посредством МИО 9 поступают в блок БФНП 4, в котором осуществляется решение задач общего самолетовождения и навигации, в частности формируется вектор положения ЛА относительно земной системы координат. Если точность формирования этого вектора высока (например, при работе БНС 1 в режиме коррекции или если после перехода в автономный режим прошло немного времени и ошибки счисления не успели накопиться), то с помощью блока БОПС 2 осуществляется визирование характерной цели (ориентира) на земной поверхности, т.е. измерение вектора относительного положения цели (ориентира) относительно ЛА. Данные о векторах и поступают в блок БФОР 6, в котором осуществляется формирование вектора  географических координат визируемого ориентира с помощью уравнения (1). Значение вектора запоминается в блоке БП 8. Погрешность
географических координат визируемого ориентира с помощью уравнения (1). Значение вектора запоминается в блоке БП 8. Погрешность  определения этого вектора составляет при этом:
определения этого вектора составляет при этом:

где  - погрешность определения в блоке БНС 1 вектора
- погрешность определения в блоке БНС 1 вектора  которая в этом режиме имеет малую величину;
которая в этом режиме имеет малую величину;
 - погрешность определения в блоке БОПС 2 вектора
- погрешность определения в блоке БОПС 2 вектора  которая имеет малую величину.
которая имеет малую величину.
В дальнейшем, при работе БНС 1 в автономном режиме с течением времени накапливаются ошибки формирования вектора , которые достигают значительной величины  . Эти ошибки можно значительно уменьшить за счет проведения коррекции по запомненной цели (ориентиру), если координаты этой цели (ориентира) были измерены на борту ЛА еще при малых ошибках определения координат в блоке БНС 1. Это достигается тем, что точность координат цели (ориентира) полностью зависит от точности ЛА, которая имелась на момент измерения координат цели (ориентира) и сохраняется в них на протяжении всего полета. При повторном приближении ЛА к ориентиру, координаты которого были рассчитаны и запомнены в блоке БП 8, осуществляется его повторное визирование и измерение с помощью БОПС 2 относительных координат . Вновь полученное значение вектора и запомненное значение вектора из блока БП 8 поступают в блок БФКЛА 7, в котором с помощью уравнения (1) осуществляется расчет нового значения вектора
. Эти ошибки можно значительно уменьшить за счет проведения коррекции по запомненной цели (ориентиру), если координаты этой цели (ориентира) были измерены на борту ЛА еще при малых ошибках определения координат в блоке БНС 1. Это достигается тем, что точность координат цели (ориентира) полностью зависит от точности ЛА, которая имелась на момент измерения координат цели (ориентира) и сохраняется в них на протяжении всего полета. При повторном приближении ЛА к ориентиру, координаты которого были рассчитаны и запомнены в блоке БП 8, осуществляется его повторное визирование и измерение с помощью БОПС 2 относительных координат . Вновь полученное значение вектора и запомненное значение вектора из блока БП 8 поступают в блок БФКЛА 7, в котором с помощью уравнения (1) осуществляется расчет нового значения вектора  . Это значение сравнивается со счисленным значением , поступающим из блока БФНП 4, в результате сравнения формируется оценка погрешности счисления , которая учитывается в дальнейшем в блоке БФНП 4 с целью повышения точности навигации. Погрешность формирования вектора , а значит и погрешность коррекции вектора , составляет величину
. Это значение сравнивается со счисленным значением , поступающим из блока БФНП 4, в результате сравнения формируется оценка погрешности счисления , которая учитывается в дальнейшем в блоке БФНП 4 с целью повышения точности навигации. Погрешность формирования вектора , а значит и погрешность коррекции вектора , составляет величину
 ,
,
где  - погрешность повторного визирования ориентира.
- погрешность повторного визирования ориентира.
Очевидно, что величина  много меньше накопленной величины погрешности автономного счисления.
много меньше накопленной величины погрешности автономного счисления.
Работа КНПрС в составе группы ЛА, дополнительно к описанному для одиночного ЛА, состоит в следующем.
При формировании на борту i-го ЛА вектора его значение передается посредством блока БСС 3 на борт j-ых ЛА (i≠j). При этом в составе передаваемой информации передается также предполагаемая точность формирования - оценка величины  . На борту каждого j-ого ЛА таким образом собирается информация обо всех запомненных ориентирах и точностях их координат. Блок БУ 5 выбирает из всех возможных ориентиров тот, точность координат которого наибольшая и который доступен для визирования собственными средствами БОПС 2. После осуществления выбора производится визирование этого ориентира и измерение соответствующего вектора , После этого осуществляется коррекция счисления координат так, как это указано ранее для одиночного ЛА, а также с помощью уравнения (2) осуществляется расчет вектора относительного положения ЛА в группе.
. На борту каждого j-ого ЛА таким образом собирается информация обо всех запомненных ориентирах и точностях их координат. Блок БУ 5 выбирает из всех возможных ориентиров тот, точность координат которого наибольшая и который доступен для визирования собственными средствами БОПС 2. После осуществления выбора производится визирование этого ориентира и измерение соответствующего вектора , После этого осуществляется коррекция счисления координат так, как это указано ранее для одиночного ЛА, а также с помощью уравнения (2) осуществляется расчет вектора относительного положения ЛА в группе.
С целью обеспечения равной точности коррекции координат для всех ЛА группы командир группы может посредством БСС 3 передать на все ЛА номер ориентира, выбранный командиром в качестве опорного. После проведения коррекции по этому ориентиру на каждом ЛА его текущие координаты будут иметь одинаковую ошибку, которая устраняется при определении взаимных координат ЛА группы.
Таким образом, введение в состав комплексной системы блоков БУ 5, БФКОР 6, БФКЛА 7, БП 8 обеспечивает эффективную коррекцию координат ЛА как одиночного, так и в составе группы и обеспечивает высокую и равную точность для всех ЛА даже при наличии хотя бы на одном из них точных навигационных данных. Это существенно повышает качество решения различных специальных задач боевого применения как одиночного ЛА, так и группы ЛА.
На примерах технической реализации показано достижение технического результата в части: повышения точности определения координат каждого ЛА; повышение точности определения географических координат ориентиров; повышение точности определения относительных координат любых пар ЛА в составе группы; обеспечение равной точности определения координат ЛА группы, вследствие чего повышается эффективность применения объектов, оснащаемых КНПрС.
ЛИТЕРАТУРА.
1. Гришутин В.Г. Лекции по авиационным прицельным системам стрельбы. - Киев.: КВВАИУ, 1980 г.
2. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г.
3. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.
4. Фомин А.В. Су-27. История истребителя. - М.: РА «Интервестник», 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОПЕРАТИВНЫХ ЦЕЛЕЙ | 2008 |
|
RU2383468C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ГРУППЫ МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232102C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2232377C1 |
| СПОСОБ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ЕЁ КОРРЕКЦИИ ПО НЕПОДВИЖНОМУ НАЗЕМНОМУ ОРИЕНТИРУ С ИЗВЕСТНЫМИ ГЕОГРАФИЧЕСКИМИ КООРДИНАТАМИ | 2019 |
|
RU2713582C1 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
Комплексная навигационно-прицельная система (КНПрС) предназначена для решения задач общего самолетовождения, навигации, информационного обеспечения решения задач прицеливания и задач групповых действий летательных аппаратов (ЛА). Техническим результатом является повышение точности определения координат ЛА, ориентиров, любых пар ЛА в составе группы, обеспечение равной точности определения координат ЛА группы. В состав КНПрС входят взаимосоединенные посредством магистрали информационного обмена базовая навигационная система, обзорно-прицельные средства обнаружения и сопровождения целей, средства связи, а также блоки формирования навигационных параметров, управления, формирования координат ориентира, формирования координат ЛА, памяти. КНПрС одиночного ЛА работает следующим образом. В режимах, когда базовая навигационная система обеспечивает определение координат ЛА с высокой точностью (при коррекции от радионавигационных средств, в течение известного времени автономного счисления после коррекции), КНПрС посредством обзорно-прицельных средств обеспечивает высокоточное определение относительных координат ориентиров и далее - географических координат ориентиров. Эти координаты запоминаются в бортовом блоке памяти КНПрС. Во время полета накапливается банк ориентиров с точными координатами, которые используются для повышения точности базовой навигационной системы. 1 ил.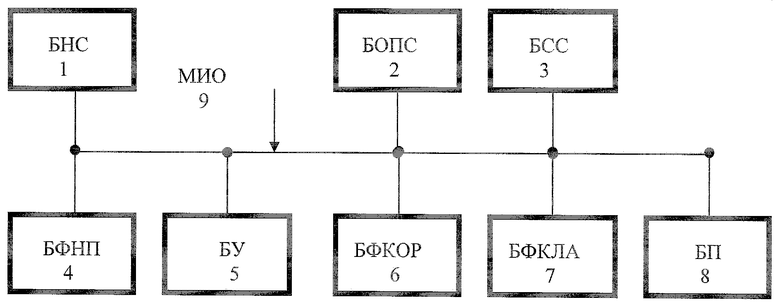
Комплексная навигационно-прицельная система, содержащая подключенные к магистрали информационного обмена базовую навигационную систему, блок обзорно-прицельных средств обнаружения и сопровождения целей, блок средств связи, блок формирования навигационных параметров, блок памяти, отличающаяся тем, что к магистрали информационного обмена дополнительно подключены блок управления выбором параметров ориентиров, блок формирования географических координат визируемого ориентира, блок формирования географических координат летательного аппарата и оценок погрешностей их счисления при повторном визировании ориентира.
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991 | |||
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА АВИАНОСНОГО И НАЗЕМНОГО БАЗИРОВАНИЯ | 2005 |
|
RU2276328C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ САМОЛЕТА | 2002 |
|
RU2216484C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

