Изобретение относится к измерениям магнитных свойств образцов твердых материалов или изделий из них и может использоваться, в частности, для определения магнитного момента космического аппарата (КА).
Известен способ определения магнитного момента образцов горных пород с помощью рок-генератора, представляющего собой индукционную катушку, внутри которой вращают исследуемый образец или эталонный образец, с целью эталонирования прибора, и измеряют эдс, наведенную образцами [Дианов-Клоков В.И. Измеритель малой остаточной намагниченности горных пород. Изв. АНСССР, сер. геофиз. №1, 1960, стр.142-147].
Особенность этого способа состоит в том, что он требует вращения образца с достаточно большой скоростью (примерно 40 оборотов в секунду), что технически трудно реализуемо для образцов больших размеров, каким является КА.
Известен способ определения магнитного момента образцов горных пород, принятый нами за прототип [Яновский Б.М. Земной магнетизм. Т.2, 1963, стр.347].
Этот способ также предусматривает:
1. Предварительное (перед началом измерений) эталонирование измерительного прибора, т.е. определение его коэффициента преобразования.
2. Установку исследуемого образца (объекта) на измерительную площадку.
3. Измерение магнитного момента в трех взаимно ортогональных направлениях в системе координат, связанных с образцом.
4. Определение параметров магнитного момента путем поворота образца на 90° перед каждым измерением по формуле

где:
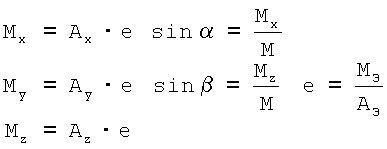
е - коэффициент преобразования измерительного прибора;
МЭ - магнитный момент эталонного образца [А·м2];
АЭ - показание измерительного прибора при измерении магнитного момента эталонного образца, что соответствует величине напряженности магнитного поля Н, создаваемого эталоном в точке расположения измерительного прибора;
А - показания измерительного прибора при измерении магнитного момента исследуемого образца (объекта) вдоль осей x, у или z в делениях шкалы прибора;
α - угол между направлением магнитного момента М и плоскостью YZ;
β - угол между направлением магнитного момента М и плоскостью XY.
Решаемая техническая задача состоит в определении, при минимальных перемещениях объекта, величины и направления магнитного момента, а также местоположения источника магнитного момента.
Получение такого набора данных о магнитных свойствах объекта необходимо, в частности, для повышения точности ориентации космического аппарата (КА), уменьшения его энергетических затрат путем минимизации магнитного момента КА, поскольку известно, что магнитное поле Земли влияет на ориентацию КА в результате взаимодействия с магнитным моментом КА. Такое взаимодействие приводит к уменьшению точности ориентации КА в околоземном космическом пространстве.
Поставленная нами задача решается следующим образом. Для измерения каждой компоненты устанавливают с противоположных сторон от объекта пару измерительных приборов, разнесенных на соответствующее предполагаемым размерам объекта известное расстояние вдоль направления измеряемой компоненты.
Для каждой пары измерителей, составляющих измерительную систему, производят эталонирование измерителей следующим образом. В центре измерительной площадки устанавливают эталон магнитного момента, представляющий собой постоянный магнит или соленоид с известным диаметром и количеством витков, ориентируют его вдоль одной из осей, подают известный ток, создают магнитное поле, величина напряженности Н которого в точке расположения измерителя будет равна

где М - величина магнитного момента эталона [А·м2], r - расстояние от эталона до измерительного прибора [м], например, векторного магнитометра. Таким же образом эталонируют остальные две пары измерительных приборов, ориентируя эталонный магнит или соленоид по направлению соответствующих осей. Если измеритель предварительно эталонирован, то операцию эталонирования можно исключить.
Затем на измерительную площадку вместо эталона магнитного момента устанавливают исследуемый образец и проводят одновременные измерения тремя парами измерителей. Получают измеренные значения напряженности магнитного поля Н1 и Н2 для каждой оси объекта.
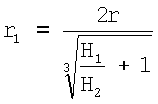
Местоположение источника магнитного момента на данной оси можно вычислить по формуле
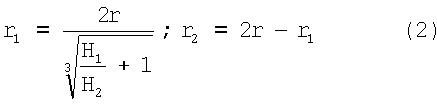
где: H1 - напряженность магнитного поля, измеренная первым измерителем [А/м];
Н2 - напряженность магнитного поля, измеренная вторым измерителем [А/м],
2r=r1+r2 - расстояние между измерителями в каждой паре [м].
Магнитный момент каждой из трех взаимно ортогональных компонент вычисляют по известной формуле

Общий магнитный момент образца

α - угол между направлением магнитного момента и плоскостью YZ;  .
.
β - угол между направлением магнитного момента образца и осью XY;  .
.
Экспериментальная проверка предлагаемого способа была осуществлена следующим образом. По обе стороны от измерительной площадки на расстоянии 0,5 м от ее центральной части были установлены два феррозондовых магнитометра, ориентированных перпендикулярно к направлению магнитного меридиана и отнивелированных горизонтально, чтобы первоначальные показания приборов были близки к нулю. Перед каждым измерением показания магнитометров подводились к нулю с помощью компенсаторов. Для градуировки измерителей был использован постоянный магнит размером 10×10×10 мм, магнитный момент которого МЭ=1.0 А·м2. Процесс градуировки происходил следующим образом. Магнит установили в центр площадки, магнитную ось магнита ориентировали вдоль измерительной оси, направленной от одного измерителя к другому. Снимали показания магнитометров, магнит поворачивали на 180° и снова снимали показания магнитометров. Напряженность магнитного поля, измеренная магнитометрами, была равна: H1=Н2=±16 А/м.
Это свидетельствует о том, что магнитометры расположены симметрично относительно центра площадки, а измерители имеют одинаковый коэффициент преобразования, равный 1 (единице). Затем в центр площадки установили, имитатор исследуемого объекта, который представлял собой прямоугольную алюминиевую емкость размером 40×40×80 см. Емкость ориентировали длинной стороной параллельно измерительной линии. Упомянутый эталонный магнит поместили внутрь емкости, направив магнитную ось магнита вдоль измерительной линии, соединяющей оба измерителя. Произвели одновременные измерения двумя измерителями и получили следующий результат: Н1=6,5 А/м, Н2=62 А/м.
Полученные в результате вычисления по формуле (1) расстояния от источника магнитного момента до первого и второго измерителя соответственно были равны: r1=0,68 м, r2=0,32 м. Контрольные измерения этих расстояний с помощью линейки подтвердили результат.
Повторные измерения проведены после смещения магнита (имитатора источника магнитного момента объекта) на произвольное расстояние в другую сторону вдоль измерительной оси.
Получили следующий результат:
Н1=181 А/м; Н2=4 А/м; r1=0,22 м; r2=0,78 м
Контрольные вычисления магнитного момента имитатора по известной формуле (3) показали результаты, разброс которых не превышал 5% от среднего значения вычисленного магнитного момента.
Таким образом, поставленный эксперимент показал, что осуществление предложенного способа позволяет определять местоположение источника магнитного момента и величину его магнитного момента с достаточной точностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения электрических и неэлектрических величин | 1985 |
|
SU1267264A1 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503026C1 |
| СИЛОВОЙ ДАТЧИК И СПОСОБ ОПРЕДЕЛЕНИЯ РАДИУСА ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2008 |
|
RU2445635C2 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИПОЛЬНОГО МАГНИТНОГО МОМЕНТА ОСТАТОЧНОЙ НАМАГНИЧЕННОСТИ И ТЕНЗОРА МАГНИТНОЙ ПОЛЯРИЗУЕМОСТИ ОБЪЕКТА И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2744817C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1998 |
|
RU2156440C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОВЕРХНОСТНОГО СОПРОТИВЛЕНИЯ ВЫСОКОПРОВОДЯЩИХ МАТЕРИАЛОВ | 1992 |
|
RU2094783C1 |
| Способ получения результатов измерений в ходе сканирования скрытых или открытых объектов | 2018 |
|
RU2706456C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ОБЪЕКТОВ | 2001 |
|
RU2210789C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |
Изобретение относится к измерениям магнитных свойств образцов твердых материалов или изделий из них и может использоваться, в частности, для определения магнитного момента космического аппарата. Отличительная особенность способа состоит в том, что измерения производятся одновременно парой приборов, расположенных по разные стороны от исследуемого объекта. Использование пары измерителей на каждом направлении позволяет с требуемой точностью определить местоположение источника магнитного момента на объекте. Расстояние от измерительных приборов до источника магнитного момента в каждом направлении вычисляется по формуле
r2=2r-r1
где H1 и H2 - напряженность магнитного поля, измеренная первым и вторым измерителем пары [А/м]; r1 и r2 - расстояние от источника магнитного момента до первого и второго измерителя соответственно [м]; 2r - расстояние между измерителями в каждой паре [м]. Технический результат состоит в определении, при минимальных перемещениях объекта, величины и направления магнитного момента, а также местоположения источника магнитного момента.
Способ определения магнитного момента объекта, включающий эталонирование измерителей, измерение компонент магнитного момента в трех взаимно ортогональных направлениях в системе координат, связанных с исследуемым объектом, с последующим определением параметров его магнитного момента, отличающийся тем, что для измерения каждой компоненты магнитного момента устанавливают пару измерителей, разнесенных на соответствующее предполагаемому размеру исследуемого объекта известное расстояние вдоль направления исследуемой компоненты, производят одновременные измерения всеми измерителями и для каждой компоненты определяют местоположение источника магнитного момента по следующей формуле:
r2=2r-r1,
где H1 и Н2 - напряженность магнитного поля, измеренная первым и вторым измерителем пары, А/м;
r1 и r2 - расстояние от источника магнитного момента до первого и второго измерителя соответственно, м;
2r - расстояние между измерителями в каждой паре, м.
| Способ определения составляющих магнитного момента движущегося объекта | 1983 |
|
SU1167551A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО МОМЕНТА СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА С СИСТЕМОЙ СИЛОВЫХ ГИРОСКОПОВ | 2000 |
|
RU2176972C1 |
| Способ определения магнитного момента дипольного источника поля и координат этого источника | 1985 |
|
SU1322208A1 |
| Способ определения магнитного момента дипольного источника поля и координат точки приложения этого момента | 1982 |
|
SU1064251A1 |
| US 6037769 A, 14.03.2000. | |||

