Изобретение относится к области магнитного курсоуказания и навигации, может быть использовано для повышения точности курсовых систем подвижных объектов, например летательных аппаратов (ЛА).
Известен способ выполнения девиационных работ [1], включающий в себя измерение датчиком магнитного курса на подвижном объекте проекций магнитного поля на горизонтальные оси, связанные с объектом, и вычисление коэффициентов девиации. Недостатком известного способа является неполное и неточное определение коэффициентов девиации.
Известен способ выполнения девиационных работ, заключающийся в компенсации магнитных девиаций с помощью эталонного магнитного поля, формируемого на объекте с помощью магнитомягких и магнитотвердых материалов [2]. Требование точного выполнения условий компенсации сводится к выполнению равенства нулю всех коэффициентов девиации. Недостатком данного способа является неучет при компенсации зависимости коэффициентов девиации от изменяющихся условий ориентации и местоположения объекта.
Наиболее близким по технической сущности к заявляемому является способ выполнения девиационных работ на подвижных объектах [3], основанный на предстартовом определении положения эквивалентного источника магнитных помех на ЛА по результатам обработки показаний со съемной немагнитной рейки, помещаемой на ЛА с шестью бескардановыми трехкомпонентными магнитометрами, расположенными на ней, и угломерной шкалой с вертикальной осью вращения, размещенной на одном конце немагнитной рейки.
Недостатком известного способа также является значительная трудоемкость выполнения предстартовых девиационных работ, вызванная двукратным расположением съемной немагнитной рейки с 6 магнитометрами на консоли крыла объекта с вращением ее вокруг вертикальной оси, а также их недостаточная точность, связанная с наличием погрешностей в снятии угловых отсчетов по обычной угломерной шкале. Указанное в связи со значительными размерами летательных аппаратов приводит к погрешностям в определении координат местоположения эквивалентного источника магнитных помех на ЛА и, следовательно, к погрешностям определения магнитного курса ЛА в полете.
Была поставлена задача: разработать такой способ проведения регламентных предстартовых девиационных работ, который позволил бы их проводить на любых аэродромах базирования с высокой точностью при малой трудоемкости. Поставленная задача решается тем, что предложен способ выполнения девиационных работ, предусматривающий многоточечные предстартовые магнитометрические измерения продольной, нормальной и поперечной составляющих вектора напряженности, результирующего магнитного поля объекта в одном курсовом положении на площадке с известными горизонтальной и вертикальной составляющими геомагнитного поля. На подвижном объекте в одном курсовом положении в месте размещения бортового магниточувствительного датчика устанавливают съемную немагнитную рейку, на которой в одной плоскости и на одной прямой расположены не менее шести бескардановых трехкомпонентных магнитометров, соответствующие оси чувствительности которых взаимно-соответственно параллельны между собой и расстояния между которыми фиксированы, затем измеряют значения нормальной составляющей вектора результирующего магнитного поля объекта, углы гироскопического курса, тангажа и крена объекта, значения которых преобразуют в параметры эквивалентного источника магнитных помех на подвижном объекте, с учетом которых в процессе движения находят значения угла магнитного курса подвижного объекта.
Новым в заявленном способе является то, что для производства измерений магнитного поля у объекта в одном курсовом положении с помощью съемной немагнитной рейки, на которой в одной плоскости и на одной прямой расположены шесть бескардановых трехкомпонентных магнитометра, оси чувствительности которых соответственно параллельны и расстояния между которыми известны, устанавливаемых на объекте в одной плоскости и на одной прямой, точка расположения первого магнитометра немагнитной рейки совпадает с точкой расположения бескарданового трехкомпонентного магнитометра объекта, а точка расположения шестого магнитометра рейки находится на оси консоли крыла. Полученные значения преобразуют в параметры эквивалентного источника магнитных помех объекта, по которым находят значения девиационной поправки к компасному курсу.
Техническим результатом заявленного способа является то, что для проведения девиационных работ не требуется специальной площадки, "чистой" в магнитном отношении и оборудованной сложными и громоздкими устройствами для придания аппарату соответствующих углов по курсу, крену и тангажу, а также сложной и крупногабаритной угломерной шкалы поворотной рейки для получения точных угловых значений при разворотах немагнитной рейки. Перед проведением девиационных работ следует определить горизонтальную и вертикальную составляющие геомагнитного поля для данного аэродрома, что также легко выполняется известными магнитометрическими датчиками [2].
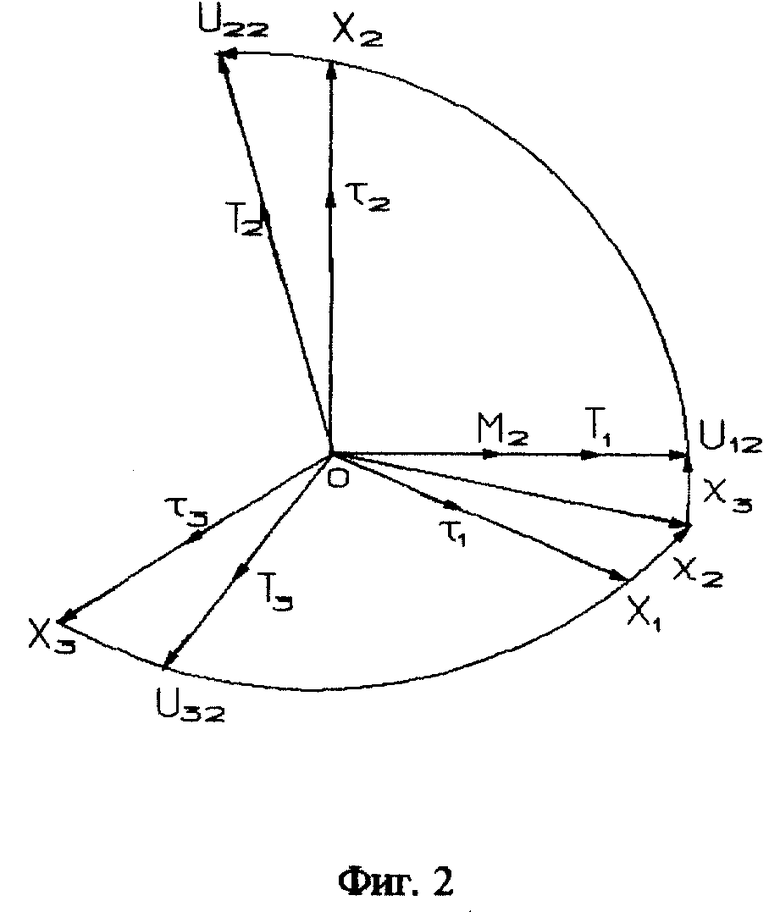
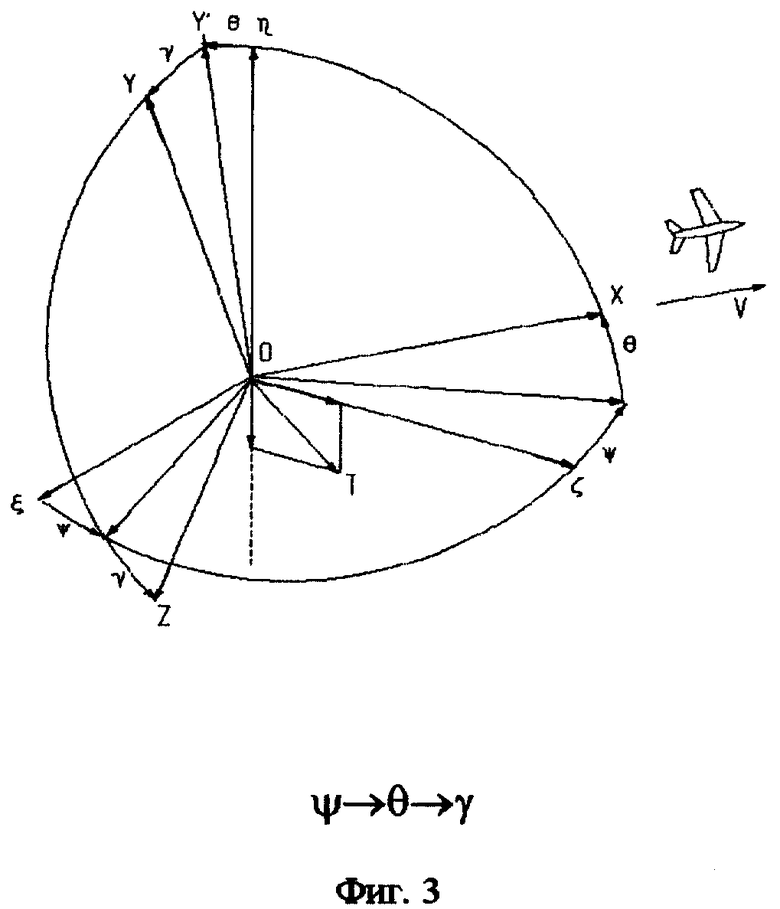
На фиг. 1 приведена структурная схема устройства для осуществления заявленного способа; на фиг. 2 показана схема поворотов правого ортогонального трехгранника, связанного с источником магнитных помех, относительно связанных осей объекта; на фиг. 3 показана схема поворотов сопровождающего трехгранника; на фиг. 4 приведена схема съемной немагнитной рейки с шестью магнитометрами; на фиг. 5 показан подход к определению расстояния от точки расположения бортового магнитометра до точки нахождения эквивалентного источника магнитных помех.
На фиг.1 приведена структурная схема устройства для осуществления заявленного способа. Устройство для осуществления способа содержит трехкомпонентный бескардановый магнитометр 1, жестко установленный на летательном аппарате; блок съемных 6 трехкомпонентных магнитометров 2, устанавливаемых во время выполнения девиационных работ на ЛА на немагнитной рейке с угломерной шкалой в плоскости и ориентируемый по осям чувствительности магнитометра 1 на известном расстоянии; блоки 1 и 2 предназначены для измерения продольной Tx1, поперечной Tx3 и нормальной Tx2 составляющих вектора напряженности геомагнитного поля на оси связанной системы координат OX1X2X3; датчик курса 3 для определения гироскопического курса ψг подвижного объекта, гировертикаль 4 для определения углов крена γ и тангажа ν подвижного объекта, первый вычислитель 5 для определения на Земле в процессе предстартовой подготовки параметров источника эквивалентных магнитных помех на ЛА (величины M2 и углов χ2,χ3 ); второй вычислитель 6 для определения величин коэффициентов axk 1...axk 3 определяющих величину поправки в показаниях бортового магнитометра 1 от эквивалентного источника магнитных помех на борту ЛА; третий вычислитель 7 для определения в процессе движения ЛА угла магнитного курса ψ ЛА. Выходы блоков 1, 2, 3, 4 соединены с входом первого вычислителя 5, на вход которого подаются с помощью потенциометра ручной выставки или контролера наземные значения горизонтальной (северной) Tξ и вертикальной Tη компонент вектора напряженности геомагнитного поля, и расстояния ri от центра помехи M2 до точек размещения бортового магнитометра 1 по оси ЛА и каждого из 6 магнитометров блока 2, устанавливаемых на съемной немагнитной рейке, а также данные об угле стояночного магнитного курса, определенные, например, по сигналам бортового датчика курса или радиосредств с учетом угла магнитного склонения местоположения ЛА [10], выход первого вычислителя 5 соединен с входом второго вычислителя 6, выход которого соединен с входом третьего вычислителя 7, который соединен с входом блока 3, на вход которого с потенциометра ручной выставки или контролера вводится расстояние ri от точки расположения эквивалентной магнитной помехи ЛА до точки установки бортового магнитометра 1, с выхода третьего вычислителя 7 в процессе движения ЛА снимаются значения угла магнитного курса ψ.
Соотношения для определения параметров эквивалентного источника магнитных помех объекта основываются на следующих теоретических положениях.
Поскольку на ЛА по авиационным требованиям магниточувствительные датчики устанавливаются на наибольшем удалении от магнитных масс с таким расчетом, чтобы в точке установки датчика собственное магнитное поле ЛА составляло величину не более 20 γ (1 γ = 10-5 э); а градиент его - не более 20 γ/м [4]; а также считая, что электромагнитные помехи и вихревая составляющая в точке установки пренебрежимо малы, то в первом приближении условно приводим все источники магнитных помех на ЛА, действующие на датчик, к одному источнику магнитных помех, обладающему магнитным моментом M2, создающим магнитное поле объекта (МПО). Причем этот вектор M2 повернут в общем случае относительно связанных осей объекта OX1X2X3 на углы χ2 и χ3;
где OX1 - продольная; OX2 - нормальная; OX3 - поперечная оси ЛА; (фиг. 2) - схема поворотов правого ортогонального трехгранника OU12U22U32, связанного с источником магнитных помех, относительно трехгранника ОХ1X2X3.
В связи с тем, что превалирующую роль в создании магнитной девиации датчика играет постоянное магнитное поле объекта, создаваемое магнитотвердым железом ЛА, а индуктивная составляющая МПО, создаваемая магнитомягким железом ЛА, мала из-за небольшого количества подобных материалов в конструкции ЛА [4, 10], то в первом приближении будем учитывать только геомагнитное поле и постоянное МПО как доминирующие на ЛА. Геомагнитное поле зададим в системе координат OX1X2X3, обозначим компоненты напряженности поля через AX1 (0), AX2 (0), AX3 (0). Вводя географический правый сопровождающий трехгранник Oξηζ, ось Oξ которого направлена на магнитный Север, ось Oη по вертикали вверх, задав углы магнитного курса (причем угол ψ считаем положительным при повороте объекта по часовой стрелке), тангажа и крена ψ,ν,γ по обычной схеме, (фиг. 3) запишем: (будем обозначать: s - sin, с - cos);
где Tξ,Tη - северная и вертикальная составляющие вектора напряженности геомагнитного поля. Эквивалентный источник помех на борту ЛА в виде МПО будем задавать через магнитный момент M2. Пользуясь методикой, изложенной в [5] , то есть, проецируя магнитный момент M2 на оси OX1X2X3, причем полагая, что т. O является центром помехи M2; и учитывая, что напряженность поля меняется в обратной пропорции кубу расстояния от некоторой точки объекта до точки О с равными коэффициентами влияния по нормальной и поперечной осям [2, 6], получаем:
где P, Q, R - составляющие постоянного МПО по осям OX1, OX2, OX3 ЛА соответственно.
Истинное магнитное поле в системе координат OX1X2X3 теперь определяется законом, аналогичным приведенному, например, в [7, с. 7]:
где k - номер оси системы координат OX1X2X3.
Аппроксимируем TXK в виде рядов [5]:
в которых величины Txk и x считаем известными по результатам многоточечных магнитометрических измерений на борту ЛА с помощью бескардановых трехкомпонентных магнитометров, а коэффициенты axk (1)...axk (3) подлежат определению с помощью, например, метода наименьших квадратов [8]:
здесь m= n+1, n - число магнитометров;  квадратичная погрешность аппроксимации.
квадратичная погрешность аппроксимации.
Взяв частные производные по axk (0)...axk (3) от этого выражения, получим систему n+1 уравнений с n+1 неизвестными. Введя дополнительные обозначения:
sk = x0 k+x1 k+...+xm k; (k = 0, 1, 2,...);
qk = x0 k • TX0 + x1 k • TX1+ ...+ xm k • TXm; (k = 0, 1, 2,...)
систему уравнений можно записать в таком виде:
где S0 = n+1. Известно [8], что если среди точек x0,...xm нет совпадающих, что обеспечивается установкой магнитометров и n ≤ m, то определитель системы (7) отличается от нуля и, следовательно, эта система имеет единственное решение. Полином (4) с такими коэффициентами будет обладать минимальным квадратичным отклонением  [8].
[8].
Предположим, что для проведения девиационных работ на ЛА, на котором установлен трехкомпонентный бескардановый магнитометр, оси чувствительности которого параллельны связанным осям ЛА и точка установки имеет известные координаты, определенные, например, по конструкционным чертежам центроплана и крыла ЛА или по схеме плазовой увязки, в наземных условиях в плоскости и по оси бортового магнитометра на фиксированном расстоянии установили съемную немагнитную рейку с расположенными на ней в одной плоскости и на одной оси 6 бескардановыми магнитометрами, на фиксированном расстоянии один от другого, оси чувствительности которых взаимно-соответственно параллельны (фиг. 4), причем точка установки первого бескарданового магнитометра съемной немагнитной рейки совпадает с точкой размещения бортового магнитометра ЛА, а точка установки шестого бескарданового магнитометра съемной немагнитной рейки в частном случае размещается на оси консоли крыла и координаты ее установки также известны.
Расстояние от точки нахождения бортового трехкомпонентного бескарданового магнитометра до точки нахождения эквивалентного источника магнитных помех X1 определим следующим образом. Предположим, что выход каждого из шести трехкомпонентных бескардановых магнитометров съемной немагнитной рейки соединен с вычислительным устройством, в качестве которого может быть использован один из бортовых вычислителей ЛА, на вход которого дополнительно поступают сигналы крена (γ) и тангажа (θ) ЛА, например, с гировертикали и сигнал стояночного магнитного курса ЛА (ψм), например с датчика курса ЛА или определенный с помощью бортовых радиосредств с учетом угла магнитного склонения местонахождения ЛА, взятого, например, с карт магнитного склонения. В вычислительном устройстве на основе поступившей информации по соотношениям [9]
δl= ψm-ψi;
определяются значение угла магнитного курса  для каждого из шести трехкомпонентных бескардановых магнитометров съемной немагнитной рейки и величины девиационных поправок
для каждого из шести трехкомпонентных бескардановых магнитометров съемной немагнитной рейки и величины девиационных поправок  для каждого из 6 магнитометров.
для каждого из 6 магнитометров.
На фиг. 5 обозначено: CC' - продольная ось ЛА; ∠d - угол стреловидности крыла ЛА; BB1 - ось консоли крыла ЛА; l1 - расстояние по оси консоли крыла ЛА до точки установки бортового трехкомпонентного магнитометра ЛА O1', совпадающее с точкой размещения первого из шести трехкомпонентных бескардановых магнитометров съемной немагнитной рейки; O'2...O'6 - точки размещения последующих со второго до шестого магнитометров съемной немагнитной рейки на оси консоли крыла; lp - длина съемной немагнитной рейки; ψм - стояночный магнитный курс ЛА; ψ1,...,ψ6 - значения магнитного курса ЛА, определенное по сигналам первого, ..., шестого магнитометров съемной немагнитной рейки; δ1,...,δ6 - величины девиационных поправок для каждого из шести магнитометров съемной рейки соответственно; O' - точка расположения эквивалентного источника магнитных помех. Искомое расстояние от точки нахождения бортового трехкомпонентного бескарданового магнитометра до точки расположения эквивалентного источника магнитных помех x1 = O'1O' находим из решения косоугольного треугольника O'1O'O'6, например по теореме синусов, откуда:
α1= 180°-(ψм-δ1);
α6= 180°-(ψм-δ6);
Далее аналогичная процедура повторяется для других косоугольных треугольников, вершинами которых являются точка расположения бортового трехкомпонентного бес карданового магнитометра на ЛА, точка расположения эквивалентного источника магнитных помех на ЛА и точки расположения оставшихся магнитометров на съемной немагнитной рейке:  и найденное расстояние осредняется
и найденное расстояние осредняется
Дополнительно предположим, что на борту ЛА имеется датчик гироскопического курса, например, КС-8 [10] и гировертикаль (ГВ) для определения углов гироскопического курса, тангажа и крена объекта; а также параметры Tξ и Tη в месте проведения девиационных работ известны, например, измерены с помощью маагниточувствительных датчиков [2].
Тогда величину погрешности в сигнале бортового магнитометра ЛА от суммарной помехи, описываемой в первом приближении эквивалентным магнитным моментом М2, запишем в следующем виде:
где TX1, TX2, TX3 - показания первого (бортового) трехкомпонентного магнитометра ЛА; величины проекций геомагнитного поля на связанные оси объекта AX1 (0), AX2 (0), AX3 (0) определяются по соотношениям (1); x1 = 1/r1 - расстояние от точки расположения эквивалентного источника магнитных помех ЛА до точки установки O1 первого (бортового) трехкомпонентного бескарданового магнитометра.
Из последнего соотношения находятся параметры магнитного момента M2 эквивалентной магнитной помехи и углы его отклонения χ2 и χ3 относительно связанных осей ЛА:
Причем процедура может выполняться по сигналам каждого из 6 трехкомпонентных магнитометров, данные затем осредняются:
Далее по известным значениям  методом наименьших квадратов [8] определяются коэффициенты aXk (0)...aXk (3) полинома:
методом наименьших квадратов [8] определяются коэффициенты aXk (0)...aXk (3) полинома:
в котором коэффициенты aXk (1), aXk (2), aXk (3) описывают влияние эквивалентной магнитной помехи на показания бортового магнитометра.
Во время полета ЛА по известному соотношению [9] с использованием информации об углах крена и тангажа объекта с ГВ и по определенным на Земле коэффициентам aXk (k),  определяется магнитный курс ЛА:
определяется магнитный курс ЛА:
где 
а анализ четвертей (I, II, III, IV) выполняется на основе знаков числителя и знаменателя выражения (15) [3].
Пример осуществления способа
На фиг. 1 приведена структурная схема устройства для осуществления заявленного способа.
Устройство для осуществления способа содержит трехкомпонентный бескардановый магнитометр 1, жестко установленный на летательном аппарате, блок съемных 6 трехкомпонентных магнитометров 2, устанавливаемых во время выполнения девиационных работ на ЛА на немагнитной рейке с угломерной шкалой в плоскости и ориентируемый по осям чувствительности магнитометра 1 на известном расстоянии; блоки 1 и 2 предназначены для измерения продольной Tx1, поперечной Tx3, и нормальной Tx2 составляющих вектора напряженности геомагнитного поля на оси связанной системы координат OX1X2X3; датчик курса 3 для определения гироскопического курса ψг подвижного объекта; гировертикаль 4 для определения углов крена γ и тангажа ν подвижного объекта, первый вычислитель 5 для определения на Земле в процессе предстартовой подготовки параметров источника эквивалентных магнитных помех на ЛА (величины M2 и углов χ2,χ3) ; второй вычислитель 6 для определения величин коэффициентов axk 1... axk 3, определяющих величину поправки в показаниях бортового магнитометра 1 от эквивалентного источника магнитных помех на борту ЛА; третий вычислитель 7 для определения в процессе движения ЛА угла магнитного курса ψ ЛА. Выходы блоков 1, 2, 3, 4 соединены с входом первого вычислителя 5, на вход которого подаются с помощью потенциометра ручной выставки или контроллера наземные значения горизонтальной (северной) Tξ и вертикальной Tη компонент вектора напряженности геомагнитного поля, ψм - значение стояночного угла магнитного курса объекта, определенные по показаниям бортового датчика, и расстояния r1 от центра помехи M2 до точек размещения бортового магнитометра 1 по оси ЛА и каждого из 6 магнитометров блока 2, устанавливаемых на съемной немагнитной рейке; выход первого вычислителя 5 соединен с входом второго вычислителя 6, выход которого соединен с входом третьего вычислителя 7, который соединен с входом блока 3, на вход которого с потенциометра ручкой выставки или контроллера вводится расстояние r1 от точки расположения эквивалентной магнитной помехи ЛА до точки установки бортового магнитометра 1, с выхода третьего вычислителя 7 в процессе движения ЛА снимаются значения угла магнитного курса ψ.
В процессе предстартовой подготовки для выполнения девиационных работ на ЛА в точке расположения бортового бескарданового трехкомпонентного магнитометра 1 в его плоскости и по его осям устанавливают и ориентируют немагнитную рейку с размещенными на ней 6 бескардановыми трехкомпонентными магнитометрами на известном расстоянии друг от друга, оси чувствительности которых взаимно-соответственно параллельны, причем точка расположения первого магнитометра немагнитной рейки совпадает с точкой расположения бортового магнитометра ЛА, а точка расположения шестого магнитометра рейки также находится на оси консоли крыла.
В первый вычислитель 1 с помощью потенциометра ручной выставки или контроллера вводят данные о северной (Tξ) и вертикальной (Tη) компонентах вектора напряженности геомагнитного поля, снятые, например, с магнитных карт местности и расстояния ri от точки расположения эквивалентной магнитной помехи ЛА по оси до каждого из трехкомпонентных бескардановых магнитометров блока 1 и блока 2, предварительно определенные по соотношениям (9, 10), а также данные об угле стояночного магнитного курса, определенные, например, по сигналам бортового датчика курса или радиосредств с учетом угла магнитного склонения местоположения ЛА [10]. По поступающим в первый вычислитель данным о проекциях вектора напряженности результирующего магнитного поля с блоков 1 и 2, углах гироскопического курса ψг, тангажа ν и крена γ с блоков 3 и 4 в первом вычислителе по соотношениям (1, 11, 12) определяются параметры эквивалентного источника магнитных помех на ЛА (M2,χ2,χ3), на основании которых во втором вычислителе 6, например, с помощью метода наименьших квадратов [8] определяются коэффициенты aXk (1)...aXk (3), характеризующие влияние эквивалентного источника магнитных помех на борту ЛА на показания блока 1 магнитометров ЛА, которые поступают в третий вычислитель 7 и запоминаются в нем; причем следует отметить, что съемный блок 2 с расположенными на нем 6 трехкомпонентными магнитометрами и угломерной шкалой используется только в процессе предстартовой подготовки при проведении девиационных работ. В процессе полета по информации об углах крена (γ) и тангажа (ν) ЛА с блока 3 и параметрах aXk(1). . .aXk (3), ri, по соотношениям (15, 16) в третьем вычислителе определяется магнитный курс ЛА, свободный от влияния эквивалентного источника магнитных помех на борту ЛА.
В качестве датчиков блока 1 и 2 могут быть использованы феррозондовые датчики [10] , в качестве блоков 3 и 4 могут быть использованы, например, курсовая система КС-8 и гировертикаль МГВ-2 соответственно [10]. Первый вычислитель 5, второй вычислитель 6 и третий вычислитель 7 могут быть реализованы, например, на стандартных элементах вычислительной техники [11].
Преимущество предлагаемого способа выполнения девиационных работ заключается в повышении точности определения магнитного курса объекта при его движении, упрощении процедуры выполнения девиационных работ и снижения их трудоемкости, поскольку при его выполнении отпадает необходимость в установке в двух точках, поворотах немагнитной рейки с магнитометрами и снятии замеров с угломерной шкалы. Предлагаемый способ может быть реализован на любой заранее не подготовленной площадке и не требует специальных и дорогостоящих девиационных площадок и девиационных кругов. Предлагаемые зависимости для определения поправок к магнитному курсу и магнитного курса ЛА могут быть реализованы вычислительным путем в бортовой ЦВМ [11].
Список использованных источников
1. Авторское свидетельство СССР N 1362931, Мкл G 01 C 17/38, 1987 г. Способ определения полукруговой девиации.
2. Нечаев П.А., Григорьев В.В. Магнитно-компасное дело. М.: Транспорт, 1983. - 239 с.
3. Патент РФ N 2108546 Мкл G 01 C 17/38, 1998 г. Способ выполнения девиационных работ на подвижных объектах.
4. Денисов В. Г. Навигационное оборудование летательных аппаратов. М.: Оборонгиз, 1963. - 384 с.
5. Плотников П. К. О концепции многоточечных измерений в бортовой магнитометрии. Сарат. гос. техн. ун-т, Саратов, 1994. - 23 с. Деп. в ВИНИТИ 05.12.94, N 2788-В94
6. Введенский В.А., Ожогин В.И. Сверхчувствительная магнитометрия и биомагнетизм. М.: Наука, ФМ, 1986. - 200 с.
7. Краснов И.П. Расчетные методы судового магнетизма и электротехники. Л.: Судостроение, 1986. - 216 с.
8. Демидович Б.П., Марон И.А., Шувалова Э.З. Численные методы анализа. М.: ФМ, 1963. - 400 с.
9. Одинцов А. А. Гиромагнитные и гироиндукционные приборы курса. Киев, КПИ, 1975. - 50 с.
10. Богданченко Н.М. Курсовые системы и их эксплуатация на самолетах. М. : Транспорт, 1983. -224 с.
11. Матов В.И., Белоусов Ю.А., Федосеев Е.П. Бортовые цифровые вычислительные машины и системы. М.: Высшая школа, 1988. - 216 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
| Электронный компас для подвижного объекта | 2024 |
|
RU2829808C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕВИАЦИИ КУРСОУКАЗАТЕЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1989 |
|
SU1633930A1 |
| Способ калибровки датчика магнитного поля интегрированной системы резервных приборов | 2016 |
|
RU2660043C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ, ХАРАКТЕРИЗУЮЩИХ НАМАГНИЧЕННОСТЬ ОБЪЕКТА, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2261456C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
Использование: в навигации и при геомагнитных измерениях с борта летательного аппарата. Сущность изобретения: с помощью группы съемных магнитометров, смонтированных на немагнитной рейке, устанавливаемой на объекте так, что точка расположения первого магнитометра рейки совпадает с точкой расположения магнитометра объекта, измеряют продольную, поперечную и нормальную составляющие вектора напряженности результирующего магнитного поля объекта, углы гироскопического курса, тангажа и крена объекта. Далее полученные значения преобразуют в параметры эквивалентного источника магнитных помех на подвижном объекте, с учетом которых в процессе движения находят значения угла магнитного курса подвижного объекта. Техническим результатом использования данного способа проведения предстартовых девиационных работ является то, что их можно осуществить на любых аэродромах базирования с высокой точностью при малой трудоемкости. 5 ил.
Способ выполнения на подвижном объекте предстартовых девиационных работ, при которых измеряют продольную, поперечную и нормальную составляющие вектора напряженности результирующего магнитного поля объекта бортовым магнитометром, углы гироскопического курса, тангажа и крена объекта и определяют параметры эквивалентного источника магнитных полей объекта с помощью группы съемных магнитометров, смонтированных на немагнитной рейке, устанавливаемой на объекте, с учетом которых в процессе движения находят значения угла магнитного курса подвижного объекта, отличающийся тем, что точка расположения первого магнитометра немагнитной рейки совпадает с точкой расположения магнитометра объекта.
