Область техники
Настоящее изобретение относится к устройству, облегчающему рулевое управление транспортным средством, которое передает вспомогательное усилие, сформированное посредством электродвигателя, на поворот управляемых колес, выполняемый за счет вращения руля.
Уровень техники
Ранее, как раскрыто в японской патентной публикации №H6-4417, устройство, облегчающее рулевое управление, выполняли таким образом, чтобы не допускать лишнего приведения и управления электродвигателем, снижая вспомогательный крутящий момент, формируемый посредством электродвигателя, или прекращая формирование вспомогательного крутящего момента посредством уменьшения управляющего напряжения, применяемого к электродвигателю, когда зубчатая рейка подходит к концу своего хода.
Сущность изобретения
Тем не менее, в режиме, когда руль повернут на большой угол поворота, требуется большой крутящий рулевой момент для того, чтобы вращать руль. Следовательно, если вспомогательный крутящий момент, формируемый посредством электродвигателя, снижается, либо формирование вспомогательного крутящего момента прекращается, когда зубчатая рейка подходит к концу своего хода, как в вышеописанной традиционной методике, водитель чувствует неестественное ощущение на руле при рулении, так что "чувство руля" ухудшается. Настоящее изобретение решает проблему ухудшения "чувства руля" и проблему формирования анормального шума в секции рулевого механизма от руля к управляемым колесам.
В общем, в режиме, когда руль повернут на значительную величину, поскольку усилие, облегчающее рулевое управление, является большим, электродвигатель выдает большой крутящий момент. Помимо этого, поскольку скорость изменения тока, протекающего через электродвигатель, является большой, изменение выходного крутящего момента электродвигателя является значительным. Следовательно, в этом режиме анормальный шум с большой вероятностью образуется в рулевом механизме вследствие разности реактивности выходного крутящего момента электродвигателя и реактивности функционирования рулевого механизма. Более конкретно, в случае, если управление электродвигателем настроено в соответствии с характеристиками рулевого механизма так, что в диапазоне обычного угла поворота никакого анормального шума в рулевом механизме не образуется, в режиме, когда управляющая реактивность электродвигателя задана высокой, когда угол поворота становится большим, в работе рулевого механизма возникает перекомпенсация по причине большого изменения выходного крутящего момента электродвигателя и образуется анормальный шум. Между тем, в случае, если управление электродвигателем настроено в соответствии с характеристиками рулевого механизма так, что в диапазоне обычного угла поворота анормальный шум в рулевом механизме не образуется, в режиме, когда управляющая реактивность электродвигателя задана низкой, когда угол поворота становится большим, возникает чрезмерная задержка в отклике выходного крутящего момента электродвигателя по отношению к работе рулевого механизма. В этом случае также образуется сильный анормальный шум.
Настоящее изобретение осуществлено для того, чтобы решить вышеописанную проблему, и целью настоящего изобретения является создание устройства, облегчающего рулевое управление транспортным средством, которое подавляет образование анормального шума посредством рулевого механизма без ухудшения "чувства руля".
Для достижения упомянутой цели согласно настоящему изобретению создано устройство, облегчающее рулевое управление, для транспортного средства, которое включает в себя электродвигатель для передачи вспомогательного усилия на поворот управляемых колес, выполняемый за счет вращения руля, в котором выполняется регулирование с обратной связью, когда фактическая величина регулирования электродвигателя используется в качестве обратной связи, так что электродвигатель работает в соответствии с целевой величиной регулирования, при этом устройство содержит средство определения угла поворота для определения угла поворота руля и средство изменения коэффициента усиления для изменения коэффициента усиления обратной связи, используемого при регулировании с обратной связью в соответствии с определяемым углом поворота. В этом случае коэффициентом усиления обратной связи может быть коэффициент усиления регулирования, касающийся пропорционального элемента и/или интегрального элемента, связанного с регулированием с обратной связью.
Средство изменения коэффициента усиления может быть сконфигурировано так, что когда определяемый угол поворота является большим, коэффициент усиления обратной связи изменяется до меньшего значения в сравнении со случаем, когда определяемый угол поворота является малым, чтобы тем самым снизить анормальный шум, который образуется вследствие высокой реактивности регулирования с обратной связью. Альтернативно средство изменения коэффициента усиления может быть сконфигурировано так, что когда определяемый угол поворота является большим, коэффициент усиления обратной связи изменяется до большего значения в сравнении со случаем, когда определяемый угол поворота является малым, чтобы тем самым снизить анормальный шум, который образуется вследствие низкой реактивности регулирования с обратной связью.
Целевой величиной регулирования электродвигателя может быть целевое значение тока, которое представляет целевой ток, который должен быть подан к электродвигателю. В этом случае фактической величиной регулирования электродвигателя является фактическое значение тока, которое представляет ток, протекающий через электродвигатель и определяемый посредством датчика тока. Предпочтительно устройство, облегчающее рулевое управление транспортным средством, содержит средство определения крутящего момента от руля для определения крутящего момента, применяемого к рулю, средство определения скорости транспортного средства для определения скорости транспортного средства и средство определения целевой величины регулирования для определения целевой величины регулирования электродвигателя в соответствии с определяемыми крутящим моментом руля и скоростью транспортного средства, посредством чего целевая величина регулирования электродвигателя определяется посредством крутящего момента и скоростью транспортного средства.
Согласно настоящему изобретению средство изменения коэффициента усиления изменяет коэффициент усиления обратной связи, используемый при регулировании с обратной связью в соответствии с углом поворота. Средство изменения коэффициента усиления изменяет коэффициент усиления обратной связи так, что когда определяемый угол поворота является большим, коэффициент усиления обратной связи изменяется до меньшего значения по сравнению со случаем, когда определяемый угол поворота является небольшим, чтобы тем самым снизить анормальный шум, который образуется вследствие высокой реактивности регулирования с обратной связью. Альтернативно средство изменения коэффициента усиления изменяет коэффициент усиления обратной связи так, что когда определяемый угол поворота является большим, коэффициент усиления обратной связи изменяется до большего значения в сравнении со случаем, когда определяемый угол поворота является небольшим, чтобы тем самым снизить анормальный шум, который образуется вследствие низкой реактивности регулирования с обратной связью. Посредством изменения коэффициента усиления обратной связи величина регулирования, используемая для того, чтобы заставить фактическую величину регулирования электродвигателя достичь целевой величины регулирования, изменяется без изменения целевой величины регулирования, посредством чего скорость перехода электродвигателя из текущего режима в режим, соответствующий целевой величине регулирования, регулируется так, чтобы увеличиваться или уменьшаться, когда угол и выходной крутящий момент электродвигателя становятся большими.
Как результат, даже когда угол поворота становится большим, обеспечивается величина регулирования электродвигателя, требуемая в режиме, когда угол поворота является большим. Следовательно, "чувство руля" не ухудшается. Дополнительно, как результат регулирования изменения усиления обратной связи в соответствии с углом поворота, может быть устранено образование анормального шума вследствие разности реактивности выходного крутящего момента электродвигателя и реактивности рулевого механизма. В частности, в случае, если управление электродвигателем отрегулировано в соответствии с характеристиками рулевого механизма так, что в диапазоне обычного угла поворота анормальный шум в рулевом механизме не формируется, в режиме, когда управляющая реактивность электродвигателя задана высокой, когда угол поворота возрастает, величина регулирования, передаваемая обратно в электродвигатель, регулируется так, чтобы уменьшиться, и выходной крутящий момент становится трудно изменить, так что формирование анормального шума вследствие перекомпенсации рулевого механизма подавляется. Между тем, в случае, если управление электродвигателем отрегулировано в соответствии с характеристиками рулевого механизма так, что в диапазоне обычного угла поворота анормальный шум в рулевом механизме не образуется, в режиме, когда управляющая реактивность электродвигателя задана низкой, когда угол поворота возрастает, величина регулирования, передаваемая обратно в электродвигатель, регулируется так, чтобы увеличиться, и выходной крутящий момент можно легко изменить, так что в выходном крутящем моменте в отношении работы рулевого механизма не создается никакой задержки реакции, посредством чего подавляется образование анормального шума.
Второй отличительный признак настоящего изобретения основывается на том, что средство изменения коэффициента усиления изменяет коэффициент усиления обратной связи с первого коэффициента усиления обратной связи на второй коэффициент усиления обратной связи, когда угол поворота, определяемый посредством средства определения угла поворота, превышает заданный угол поворота; и дополнительно имеется средство определения скорости поворота для определения скорости поворота руля и средство регулирования изменения коэффициента усиления для обеспечения средству изменения коэффициента усиления возможности изменения коэффициента усиления обратной связи, когда скорость поворота, определяемая посредством средства определения скорости поворота, составляет менее заданной скорости поворота, и запрета на изменение коэффициента усиления обратной связи средством изменения коэффициента усиления, когда определяемая скорость поворота равна или превышает заданную скорость поворота.
Когда руль поворачивается внезапно в режиме большого угла поворота, в некоторых случаях требуется резкое увеличение напряжения (тока). Если коэффициент усиления обратной связи переключается в этот режим, то управляющая реактивность электродвигателя изменяется внезапно и чрезмерно, так что может быть образован анормальный шум и в рулевом механизме может возникнуть неисправность. Тем не менее, согласно второму отличительному признаку настоящего изменения резкие изменения тока возбуждения, применяемого к электродвигателю, подавляются, так что могут быть предотвращены образование анормального шума и неисправность рулевого механизма, связанные с внезапным изменением управляющей реактивности электродвигателя.
Третий отличительный признак настоящего изобретения основывается на том, что обеспечивается запаздывание в регулирование изменения коэффициента усиления обратной связи, выполняемое посредством средства изменения коэффициента усиления и средства регулирования изменения коэффициента усиления в соответствии с изменениями угла поворота, определяемыми посредством средства определения угла поворота руля, и скорости поворота руля, определяемой посредством средства определения скорости поворота руля. Благодаря этой конфигурации может быть снижена частота переключения коэффициента усиления обратной связи для изменений угла поворота и скорости поворота. Как результат, частое переключение коэффициента усиления обратной связи, то есть частое переключение тока возбуждения, подаваемого в электродвигатель, уменьшается, посредством чего может более эффективно подавляться образование анормального шума в рулевом механизме.
Четвертый отличительный признак настоящего изобретения основывается на том, что средство изменения коэффициента усиления изменяет коэффициент усиления обратной связи с первого коэффициента усиления обратной связи на второй коэффициент усиления возможности изменения коэффициента усиления обратной связи, когда угол поворота, определяемый посредством средства определения угла поворота, превышает заданный угол поворота; причем целевое значение тока снижается по мере того, как скорость транспортного средства возрастает; при этом дополнительно имеется средство регулирования изменения коэффициента усиления для обеспечения средству изменения коэффициента усиления возможности изменения коэффициента усиления обратной связи, когда ток, протекающий через электродвигатель, превышает заданный ток, и запрета на изменение коэффициента усиления обратной связи средством изменения коэффициента усиления, когда ток, протекающий через электродвигатель, равен или меньше заданного тока. В этом случае целевое значение тока или фактическое значение тока может быть использовано в качестве тока, протекающего через электродвигатель.
Даже когда угол поворота руля является большим, а ток, протекающий через электродвигатель, является небольшим, коэффициент усиления обратной связи не переключается. Другими словами, даже когда угол поворота руля является большим, а скорость транспортного средства - высокой, коэффициент усиления обратной связи не переключается. Как результат, даже когда коэффициент усиления обратной связи установлен так, чтобы не допускать образования анормального шума из рулевого механизма в течение периодов, когда транспортное средство останавливается или перемещается на очень низкой скорости, а руль поворачивается в значительной степени, коэффициент усиления обратной связи не переключается в течение периодов, когда транспортное средство перемещается на высокой скорости, посредством чего может быть предотвращено ухудшение "чувства руля".
Пятый отличительный признак настоящего изобретения основывается на том, что обеспечивается запаздывание в регулировании изменения коэффициента усиления обратной связи, выполняемое посредством средства изменения коэффициента усиления и средства регулирования изменения коэффициента усиления в соответствии с изменениями угла поворота, определяемыми посредством средства определения угла поворота, и тока, протекающего через электродвигатель. Благодаря этой конфигурации может быть снижена частота переключения коэффициента усиления обратной связи для изменений угла поворота и тока, протекающего через электродвигатель. Как результат, частое переключение коэффициента усиления обратной связи, то есть частое переключение тока возбуждения, подаваемого в электродвигатель, уменьшается, посредством чего может более эффективно подавляться образование анормального шума в рулевом механизме.
Шестой отличительный признак настоящего изобретения базируется на том, что средство изменения коэффициента усиления изменяет коэффициент усиления обратной связи с первого коэффициента усиления обратной связи на второй коэффициент усиления обратной связи, когда угол поворота, определяемый посредством средства определения угла поворота, становится больше заданного угла поворота; причем используется средство определения скорости изменения тока для определения в качестве скорости изменения тока отношения скорости изменения тока, протекающего через электродвигатель, к скорости изменения крутящего момента от руля, определенного посредством средства определения крутящего момента от руля, и средство регулирования изменения коэффициента усиления для обеспечения средству изменения коэффициента усиления возможности изменения коэффициента усиления обратной связи, когда скорость изменения тока, определяемая посредством средства определения скорости изменения тока, превышает заданную скорость изменения, и запрета на изменение коэффициента усиления обратной связи средством изменения коэффициента усиления, когда определяемая скорость изменения тока равна или меньше заданной скорости изменения. В этом случае также целевое значение тока или фактическое значение тока может быть использовано в качестве тока, протекающего через электродвигатель.
Скорость изменения тока представляет модуль изменения крутящего момента, формируемый посредством электродвигателя для требуемого вспомогательного крутящего момента, то есть режима, когда анормальный шум с большой вероятностью образуется посредством увеличения его значения. Когда скорость изменения тока является небольшой, переключение коэффициента усиления обратной связи посредством средства изменения коэффициента усиления запрещено, а когда скорость изменения тока становится большой, переключение коэффициента усиления обратной связи посредством средства изменения коэффициента усиления разрешено. Как результат, коэффициент усиления обратной связи с большой вероятностью переключается в режим, когда образуется анормальный шум, так что снижение анормального шума и хорошее "чувство руля" реализуются одновременно.
Седьмой отличительный признак настоящего изобретения основывается на том, что обеспечивается запаздывание в регулирование изменения коэффициента усиления обратной связи, выполняемое посредством средства изменения коэффициента усиления и средства регулирования изменения коэффициента усиления в соответствии с изменениями угла поворота, определяемыми посредством средства определения угла поворота, и скорости изменения тока, определяемой посредством средства вычисления скорости изменения тока. Благодаря этой конфигурации частота переключения коэффициента усиления обратной связи для изменений угла поворота и скорости изменения тока может быть снижена. Как результат, частое переключение коэффициента усиления обратной связи, то сеть частое переключение тока возбуждения, подаваемого в электродвигатель, уменьшается, посредством чего образование анормального шума в рулевом механизме может подавляться более эффективно.
Восьмой отличительный признак настоящего изобретения основывается на том, что средство изменения коэффициента усиления изменяет коэффициент усиления обратной связи с первого коэффициента усиления обратной связи на второй коэффициент усиления обратной связи, когда угол поворота, определяемый посредством средства определения угла поворота, превышает заданный угол поворота; причем используется средство регулирования изменения коэффициента усиления для обеспечения средству изменения коэффициента усиления возможности изменения коэффициента усиления обратной связи, когда скорость транспортного средства, определяемая посредством средства определения скорости транспортного средства, меньше заданной скорости транспортного средства, и запрета на изменение коэффициента усиления обратной связи средством изменения коэффициента усиления, когда скорость транспортного средства равна или выше заданной скорости транспортного средства.
Благодаря этой конфигурации, даже когда угол поворота руля является большим, а скорость транспортного средства - высокой, коэффициент усиления обратной связи не переключается. Как результат, даже когда коэффициент усиления обратной связи установлен так, чтобы не допускать образования анормального шума из рулевого механизма в течение периодов, когда транспортное средство останавливается или перемещается на очень низкой скорости и руль поворачивается в значительной степени, коэффициент усиления обратной связи не переключается в течение периодов, когда транспортное средство перемещается на высокой скорости, посредством чего может быть предотвращено ухудшение "чувства руля".
Девятый отличительный признак настоящего изобретения основывается на том, что обеспечивается запаздывание в регулирование изменения коэффициента усиления обратной связи, выполняемое посредством средства изменения коэффициента усиления и средства регулирования изменения коэффициента усиления в соответствии с изменениями угла поворота, определяемыми посредством средства определения угла поворота, и скорости транспортного средства, определяемой посредством средства определения скорости транспортного средства. Благодаря этой конфигурации частота переключения коэффициента усиления обратной связи для изменений фактического угла поворота и скорости транспортного средства может быть снижена. Как результат, частое переключение коэффициента усиления обратной связи, то есть частое переключение тока возбуждения, подаваемого в электродвигатель, уменьшается, посредством чего может более эффективно подавляться образование анормального шума в рулевом механизме.
Десятый отличительный признак настоящего изобретения основывается на том, что средство изменения коэффициента усиления включает в себя средство обработки с низкочастотным фильтром для выполнения обработки низкочастотной фильтрации для коэффициента усиления обратной связи, измененного в соответствии с углом поворота. Благодаря этой конфигурации коэффициент усиления обратной связи постепенно изменяется после переключения, так что даже когда коэффициент усиления обратной связи изменяется посредством средства изменения коэффициента усиления, характеристика отклика усиления, облегчающего рулевое управление, формируемого посредством электродвигателя, изменяется плавно, так что водитель не чувствует никаких неестественных ощущений, когда он поворачивает руль.
Краткое описание чертежей
Фиг.1 - обобщенный схематичный вид рулевого устройства для транспортного средства, имеющего функцию облегчения рулевого управления согласно варианту осуществления настоящего изобретения;
фиг.2 - первый пример управления согласно настоящему изобретению с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.3 - график, иллюстрирующий отношение между крутящим моментом руля, скоростью транспортного средства и целевым значением тока;
фиг.4A - график, иллюстрирующий примерное отношение между углом поворота и коэффициентом усиления P;
фиг.4B - график, иллюстрирующий примерное отношение между углом поворота и коэффициентом усиления I;
фиг.5A - график, иллюстрирующий другое примерное отношение между углом поворота и коэффициентом усиления P;
фиг.5B - график, иллюстрирующий другое примерное отношение между углом поворота и коэффициентом усиления I;
фиг.6A - график, иллюстрирующий еще одно другое примерное отношение между углом поворота и коэффициентом усиления P;
фиг.6B - график, иллюстрирующий еще одно другое примерное отношение между углом поворота и коэффициентом усиления I;
фиг.7A - график, иллюстрирующий еще одно другое примерное отношение между углом поворота и коэффициентом усиления P;
фиг.7B - график, иллюстрирующий еще одно другое примерное отношение между углом поворота и коэффициентом усиления I;
фиг.8 - второй пример управления согласно настоящему изобретению с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.9 - блок-схема последовательности операций способа, иллюстрирующая программу определения угла поворота, приводимую в исполнение в блоке определения угла поворота с фиг.8;
фиг.10 - блок-схема последовательности операций способа, иллюстрирующая программу задания коэффициента усиления PI, приводимую в исполнение в блоке задания коэффициента усиления PI с фиг.8;
фиг.11 - таблица, используемая для пояснения карты распределения памяти, которая сохраняет коэффициенты усиления P и коэффициенты усиления I;
фиг.12 - третий пример управления согласно настоящему изобретению с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.13 - блок-схема последовательности операций способа, иллюстрирующая программу определения условий изменения коэффициента усиления, приводимую в исполнение в блоке определения условий изменения коэффициента усиления с фиг.12;
фиг.14 - блок-схема последовательности операций способа, иллюстрирующая модификацию программы определения условий изменения коэффициента усиления с фиг.12;
фиг.15A - график, иллюстрирующий отношение между углом поворота и флагом конечного состояния;
фиг.15B - график, иллюстрирующий отношение между скоростью поворота и флагом условия скорости поворота;
фиг.16 - четвертый пример управления согласно настоящему изобретению с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.17 - блок-схема последовательности операций способа, иллюстрирующая программу определения условий изменения коэффициента усиления, приводимую в исполнение в блоке определения условий изменения коэффициента усиления с фиг.16;
фиг.18 - пятый пример управления согласно настоящему изобретению с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.19 - блок-схема последовательности операций способа, иллюстрирующая программу вычисления скорости изменения тока, приводимую в исполнение в блоке вычисления скорости изменения тока с фиг.18;
фиг.20 - блок-схема последовательности операций способа, иллюстрирующая программу определения условий изменения коэффициента усиления, приводимую в исполнение в блоке определения условий изменения коэффициента усиления с фиг.18;
фиг.21 - шестой пример управления согласно настоящему изобретению с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.22 - блок-схема последовательности операций способа, иллюстрирующая программу определения условий изменения коэффициента усиления, приводимую в исполнение в блоке определения условий изменения коэффициента усиления с фиг.21;
фиг.23 - модификация первого примера управления с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.24 - модификация второго примера управления с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.25 - модификация третьего примера управления с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.26 - модификация четвертого примера управления с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.27 - модификация пятого примера управления с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1;
фиг.28 - модификация шестого примера управления с иллюстрацией функциональной блок-схемы электронного блока управления с фиг.1.
Наилучший способ осуществления изобретения
Далее будет описан вариант осуществления настоящего изобретения со ссылкой на чертежи. На фиг.1 схематично проиллюстрировано рулевое устройство для транспортного средства, которое включает в себя устройство, облегчающее рулевое управление, согласно настоящему изобретению.
Рулевое устройство для транспортного средства включает в себя рулевой вал 12, верхний конец которого соединен с рулем 11, так что рулевой вал 12 вращается вместе с рулем 11. Ведущая шестерня 13 соединена с нижним концом рулевого вала 12, так что ведущая шестерня 13 вращается вместе с рулевым валом 12. Ведущая шестерня 13 находится в зацеплении с зубцами, выполненными на зубчатой рейке 14, чтобы тем самым формировать механизм реечной передачи. Левое и правое передние колеса FW1 и FW2 соединены с возможностью поворота с противоположными концами зубчатой рейки 14 посредством непоказанных поперечных рулевых тяг и рычагов поворотного кулака. Левое и правое передние колеса FW1 и FW2 поворачиваются влево или вправо в соответствии с осевым смещением зубчатой рейки 14, вызываемым посредством вращения рулевого вала 12 вокруг своей оси.
Электродвигатель 15, облегчающий рулевое управление, входит в состав зубчатой рейки 14. Электродвигатель 15 соединен с зубчатой рейкой 14 посредством механизма 16 "винт-шариковая гайка" с силовой передачей. Электродвигатель 15 помогает повороту левого и правого передних колес FW1 и FW2 за счет своего вращения. Механизм 16 "винт-шариковая гайка", который выступает в качестве редуктора и преобразователя вращательного в прямолинейное движение, преобразует вращательное движение электродвигателя 15 в прямолинейное движение, при этом уменьшая скорость вращения, и передает прямолинейное движение на зубчатую рейку 14. Вместо компоновки электродвигателя 15 в составе зубчатой рейки 14 электродвигатель 15 может быть скомпонован в составе рулевого вала 12 таким образом, чтобы передавать вращение электродвигателя 15 на рулевой вал 12 посредством редуктора, чтобы тем самым приводить рулевой вал 12 во вращение вокруг своей оси.
Далее описано электрическое устройство управления, которое управляет работой электродвигателя 15. Электрическое устройство управления включает в себя датчик 21 крутящего момента от руля, датчик 22 угла поворота и датчик 23 скорости транспортного средства. Датчик 21 крутящего момента от руля входит в состав рулевого вала 12 и приспособлен для того, чтобы обнаруживать крутящий момент T от руля, который действует на рулевой вал 12 в результате операции вращения руля 11. Крутящий момент T от руля допускает положительное или отрицательное значение в зависимости от того, поворачиваются левое и правое передние колеса FW1 и FW2 вправо или влево, а модуль положительного или отрицательного значения представляет модуль крутящего момента T от руля. Вместо включения датчика 21 крутящего момента от руля в состав рулевого вала 12, датчик 21 крутящего момента от руля может входить в состав зубчатой рейки 14, чтобы обнаруживать крутящий момент T от руля из величины искривления зубчатой рейки 14 в осевом направлении.
Датчик 22 угла поворота скомпонован в составе рулевого вала 12 и приспособлен для того, чтобы обнаруживать фактический угол θ поворота руля 11 посредством определения угла вращения рулевого вала 12. Фактический угол θ поворота допускает положительное или отрицательное значение в зависимости от того, вращается руль 11 по часовой стрелке или против часовой стрелки, и модуль положительного или отрицательного значения представляет модуль фактического угла θ поворота. Вместо включения датчика 22 угла поворота в состав рулевого вала 12, датчик 22 угла поворота может входить в состав зубчатой рейки 14, чтобы обнаруживать фактический угол θ поворота из величины смещения зубчатой рейки 14 в осевом направлении. Дополнительно, поскольку угол вращения электродвигателя 15 пропорционален фактическому углу θ поворота, фактический угол θ поворота может быть определен из угла вращения электродвигателя 15. Следует отметить, что поскольку фактический угол θ поворота пропорционален углу поворота левого и правого передних колес FW1 и FW2, аналогичное определение может быть выполнено посредством использования угла поворота левого и правого передних колес FW1 и FW2. Датчик 23 скорости транспортного средства обнаруживает скорость V транспортного средства.
Датчик 21 крутящего момента от руля, датчик 22 угла поворота и датчик 23 скорости транспортного средства соединены с электронным блоком 24 управления. Электронный блок 24 управления, главным образом, сформирован посредством микро-ЭВМ, состоящей из ЦП, ПЗУ, ОЗУ и т.п. Электронный блок 24 управления приводит электродвигатель 15 посредством возбуждающей схемы 25 посредством различных вычислительных программных средств управления, которые описаны далее. Возбуждающая схема 25 принимает значение E0 управляющего напряжения из электронного блока 24 управления и подает в электродвигатель 15 ток, пропорциональный значению E0 управляющего напряжения, чтобы тем самым инструктировать электродвигателю 15 сформировать вспомогательный крутящий момент, пропорциональный значению E0 управляющего напряжения. Датчик 25a тока предусмотрен в возбуждающей схеме 25. Датчик 25a тока обнаруживает фактическое значение I тока, которое представляет модуль тока, протекающего через электродвигатель 15, и передает его в электронный блок 24 управления.
Выше приведена примерная аппаратная конфигурация рулевого устройства для транспортного средства согласно настоящему изобретению. Различные примеры управления описываются последовательно. В этих примерах управления в ответ на включение переключателя зажигания ЦП в электронном блоке 24 управления приводит в исполнение программу, сохраненную в ПЗУ, чтобы управлять вращением электродвигателя 15. В последующих описаниях примеров управления программы, приводимые в исполнение посредством ЦП, представлены посредством функциональной блок-схемы.
a) Первый пример управления
Сначала будет подробно описан первый пример управления со ссылкой на чертежи. Фиг.2 представляет собой функциональную блок-схему электронного блока 24 управления согласно первому примеру управления. Блок BL1 определения целевого значения тока определят целевое значение I* тока, которое изменяется в соответствии с крутящим моментом T от руля и скоростью V транспортного средства, при этом ссылаясь на таблицу целевых значений тока посредством использования крутящего момента T от руля, определенного посредством датчика 21 крутящего момента от руля, и скорости V транспортного средства, определяемой посредством датчика 23 скорости транспортного средства. Эта таблица целевых значений тока предварительно сохранена в ПЗУ в электронном блоке 24 управления. Как показано на фиг.3, для каждого из множества репрезентативных скоростей транспортного средства, таблица целевых значений тока сохраняет целевое значение I* тока, которое возрастает нелинейно с крутящим моментом T от руля. Для данного крутящего момента T от руля чем ниже скорость V транспортного средства, тем выше целевое значение I* тока. Следует отметить, что вместо использования таблицы целевых значений тока целевое значение I* тока может быть вычислено посредством использования предварительно заданной функции, которая представляет целевое значение I* тока, которое изменяется в соответствии с крутящим моментом T от руля и скоростью V транспортного средства.
Определенное таким образом целевое значение I* тока передается в блок BL2 вычисления отклонения тока. Этот блок BL2 вычисления отклонения тока принимает фактическое значение I тока, определенное посредством датчика 25a тока. Блок BL2 вычисления отклонения тока вычисляет отклонение тока ΔI=(I*-I) посредством вычитания фактического значения I тока из целевого значения I* тока и передает отклонение ΔI тока в блок BL3 интегральных вычислений и блок BL4 регулирования коэффициента усиления P (то есть блок BL4 регулирования коэффициента усиления пропорционального элемента). Блок BL3 интегральных вычислений выполняет интегральное вычисление отклонения ΔI тока, которое меняется с течением времени, и передает отклонение ΔI тока, прошедшее интегральное вычисление, в блок BL5 регулирования коэффициента усиления I (то есть блок BL5 регулирования коэффициента усиления интегрального элемента).
Между тем, блок BL6 задания коэффициента усиления PI (то есть блок BL6 задания коэффициента усиления пропорционального/интегрального элемента) задает коэффициент усиления P Kp и коэффициент усиления I Ki, которые изменяются в соответствии с фактическим углом θ поворота, при этом ссылаясь на таблицу соответствия коэффициентов усиления P (то есть таблицу соответствия коэффициентов усиления пропорциональных элементов) и таблицу соответствия коэффициентов усиления I (таблицу соответствия коэффициентов усиления интегральных элементов) посредством использования фактического угла θ поворота, определенного посредством датчика 22 угла поворота. Эта таблица соответствия коэффициентов усиления P и таблица соответствия коэффициентов усиления I предварительно заданы в ПЗУ электронного блока 24 управления. Как показано на фиг.4A и 4B, таблица соответствия коэффициентов усиления P и таблица соответствия коэффициентов усиления I сохраняют коэффициент усиления P Kp и коэффициент усиления I Ki, каждый из которых допускает большое значение, когда абсолютное значение |θ| фактического угла θ поворота равно или меньше заданного угла θ1 поворота (например, 500 градусов), и допускает небольшое значение, когда абсолютное значение |θ| больше заданного угла θ1 поворота. Следует отметить, что вместо использования данных таблиц соответствия коэффициентов усиления P и коэффициентов усиления I, коэффициент усиления P Kp и коэффициент усиления I Ki могут быть вычислены посредством использования предварительно заданных функций, которые соответственно представляют коэффициент усиления P Kp и коэффициент усиления I Ki, которые изменяются в соответствии с фактическим углом θ поворота.
Блок BL4 регулирования коэффициента усиления P выводит в блок BL7 сложения пропорциональное значение управления Kp∙ΔI, которое получается посредством умножения отклонения ΔI тока, переданного из блока BL2 вычисления отклонения тока, на коэффициент усиления P Kp, переданный из блока BL6 задания коэффициента усиления PI. Блок BL5 регулирования коэффициента усиления I выводит в блок BL7 сложения интегральное значение управления Ki∙∫ΔIdt, которое получается посредством умножения интегрального значения ∫ΔIdt отклонения тока, переданного из блока BL3 интегрального вычисления, на коэффициент усиления I Ki, переданный из блока BL6 задания коэффициента усиления PI. Блок BL7 сложения суммирует пропорциональное значение Kp∙ΔI управления и интегральное значение Ki∙∫ΔIdt управления и выводит результирующее значение Kp∙ΔI+Ki∙∫ΔIdt в возбуждающую схему 25 в качестве значения E0 управляющего напряжения.
Возбуждающая схема 25 передает в электродвигатель 15 возбуждающий ток, пропорциональный значению E0 управляющего напряжения, и выполняет регулирование с обратной связью вращения электродвигателя 15. Соответственно электродвигатель 15 вращается и выводит крутящий момент, пропорциональный значению E0 управляющего напряжения. Вращение электродвигателя 15 передается в механизм 16 "винт-шариковая гайка", который преобразует вращательное движение электродвигателя 15 в прямолинейное движение, при этом снижая скорость вращения, и приводит зубчатую рейку 14 в осевом направлении. Как результат, операции водителя по повороту руля 11 содействует электродвигатель 15, так что левое и правое передние колеса FW1 и FW2 поворачиваются посредством усилия на ободе руля, прилагаемого водителем, и усилия, облегчающего рулевое управление и формируемого электродвигателем 15.
Соответственно водитель может поворачивать руль 11 при содействии вспомогательной силы, формируемой электродвигателем 15. В этом случае, даже когда фактический угол θ поворота становится большим, электродвигатель 15 приводится и регулируется в соответствии с целевым значением I* тока и обеспечивается величина регулирования электродвигателя 15, требуемая в режиме, когда фактический угол θ поворота большой, так что "чувство руля" не ухудшается. Дополнительно, когда абсолютное значение |θ| фактического угла θ поворота равно или меньше заданного угла θ1 поворота, коэффициент усиления P Kp и коэффициент усиления I Ki задаются равными соответствующим большим значениям. Как результат применения коэффициента усиления P Kp и коэффициента усиления I Ki, равных большим значениям, в первом примере управления управляющая реактивность электродвигателя 15 поддерживается высокой при условии, что абсолютное значение |θ| фактического угла θ поворота находится в рамках заданного угла θ1 поворота, тем самым, подавляя формирование анормального шума из рулевого механизма, состоящего из электродвигателя 15, механизма 16 "винт-шариковая гайка", зубчатой рейки 14 и т.д. Когда абсолютное значение |θ| фактического угла θ поворота возрастает и превышает предварительно заданный угол θ1 поворота, коэффициенты усиления Kp и Ki, которые являются коэффициентами усиления обратной связи, изменяются до меньших значений. В результате регулирования с обратной связью электродвигателя 15 с меньшими коэффициентами усиления Kp и Ki, даже когда варьирование значения E0 управляющего напряжения возрастает, выходной крутящий момент электродвигателя 15 становится трудно изменить, так что подавляется образование анормального шума, возникающее в результате перекомпенсации рулевого механизма.
Следует отметить, что в первом примере управления используются таблицы коэффициентов усиления P и коэффициентов усиления I, которые соответственно сохраняют коэффициент усиления P Kp и коэффициент усиления I Ki, каждый из которых изменяется с первого значения на второе значение, когда абсолютное значение |θ| фактического угла θ поворота превышает предварительно заданный угол θ1 поворота. Тем не менее, вместо этих таблиц могут быть использованы таблицы коэффициентов усиления P и коэффициентов усиления I, которые соответственно сохраняют коэффициент усиления P Kp и коэффициент усиления I Ki, каждый из которых постепенно изменяется с большого значения на небольшое значение по мере того, как абсолютное значение |θ| фактического угла θ поворота возрастает при прохождении через предварительно заданный угол θ1 поворота, как показано на фиг.5A и 5B. В этом случае регулирование обратной связи выполняется посредством использования коэффициента усиления P Kp и коэффициента усиления I Ki, который плавно изменяется в соответствии с изменением фактического угла θ поворота, так что переключение коэффициента усиления обратной связи осуществляется плавно. Соответственно в сравнении со случаем вышеописанного первого примера управления, водитель испытывает в меньшей степени неестественное ощущение при повороте руля 11.
В первом примере управления и его модификации, когда абсолютное значение |θ| фактического угла θ поворота возрастает, коэффициент усиления P Kp и коэффициент усиления I Ki уменьшаются до меньших значений, в то время, когда абсолютное значение |θ| является небольшим. Тем не менее, могут быть использованы таблицы коэффициентов усиления P и коэффициентов усиления I, которые соответственно сохраняют коэффициент усиления P Kp и коэффициент усиления I Ki, каждый из которых допускает небольшое значение, когда абсолютное значение |θ| фактического угла θ поворота равно или меньше заданного угла θ1 поворота, и допускает большое значение, когда абсолютное значение |θ| превышает предварительно заданный угол θ1 поворота, как показано на фиг.6A и 6B. В этой модификации также могут быть использованы таблицы коэффициентов усиления P и коэффициентов усиления I, которые соответственно хранят коэффициент усиления P Kp и коэффициент усиления I Ki, каждый из которых постепенно изменяется с небольшого значения на большое значение по мере того, как абсолютное значение |θ| фактического угла θ поворота возрастает при прохождении через предварительно заданный угол θ1 поворота, как показано на фиг.7A и 7B.
Как и в случае первого примера управления, управление электродвигателем 15 может быть отрегулировано так, что анормальный шум не образуется из рулевого механизма, состоящего из электродвигателя 15, механизма 16 "винт-шариковая гайка" и зубчатой рейки 14, в режиме, когда управляющая реактивность (то есть частотная реактивность) электродвигателя 15 высокая, а абсолютное значение |θ| фактического угла θ поворота небольшое. Тем не менее, в некоторых устройствах помощи руления управление электродвигателем 15 регулируется в соответствии с характеристиками рулевого механизма так, что анормальный шум не образуется от рулевого механизма, посредством снижения управляющей реактивности (то есть частотной реактивности) электродвигателя 15 в рамках диапазона, в котором абсолютное значение |θ| фактического угла θ поворота является небольшим. В этом случае, когда абсолютное значение |θ| фактического угла θ поворота возрастает, задержка реакции выходного крутящего момента электродвигателя 15 в отношении работы рулевого механизма в большинстве случаев значительна. Тем не менее, в вышеописанной модификации, когда абсолютное значение |θ| фактического угла θ поворота является большим, коэффициент усиления P Kp и коэффициент усиления I Ki возрастают способом, противоположным случаю первого примера управления. Следовательно, задержка реакции выходного крутящего момента электродвигателя 15 уменьшается и образование анормального шума из рулевого механизма подавляется.
В первом примере управления и его модификации электродвигатель 15 регулируется с обратной связью посредством использования коэффициента усиления P Kp и коэффициента усиления I Ki. Тем не менее, электродвигатель 15 может регулироваться с обратной связью посредством использования только одного из коэффициента усиления P Kp и коэффициента усиления I Ki. Хотя в других примерах управления, описанных ниже, электродвигатель 15 регулируется с обратной связью посредством использования и коэффициента усиления P Kp, и коэффициента усиления I Ki, электродвигатель 15 в других примерах управления также может регулироваться с обратной связью посредством использования только одного из коэффициента усиления P Kp и коэффициента усиления I Ki.
b) Второй пример управления
Далее будет описан второй пример управления. На фиг.8 показана функциональная блок-схема электронного блока 24 управления согласно этому второму примеру управления. Блок-схема согласно фиг.8 отличается от блок-схемы согласно фиг.2 тем, что блок BL8 определения угла поворота добавлен к стадии, предшествующей блоку BL6 задания коэффициентов усиления PI. Хотя блок BL6 задания коэффициентов усиления PI согласно фиг.8 отличается по функциям от блока BL6 задания коэффициентов усиления PI по фиг.2, остальные блоки идентичны блокам функциональной блок-схемы по фиг.2. Поэтому описываются только части, отличающиеся от первого примера управления, а описания остальных частей не повторяются.
Блок BL8 определения угла поворота многократно приводит в исполнение через предварительно заданные короткие интервалы программу определения угла поворота по фиг.9, которая состоит из этапов S10-S15, с тем, чтобы присвоить флагу FLG значение 0 или 1. Флаг FLG используется для того, чтобы определять условия задания коэффициента усиления P и коэффициента усиления I. То есть блок BL8 определения угла поворота запрашивает фактический угол θ поворота из датчика 22 угла поворота и присваивает флагу FLG значение 0, когда абсолютное значение |θ| фактического угла θ поворота равно или меньше заданного угла θ1 поворота, и значение 1, когда абсолютное значение |θ| превышает предварительно заданный угол θ1 поворота.
Блок BL6 задания коэффициентов усиления PI многократно приводит в исполнение через предварительно заданные короткие интервалы программу задания коэффициентов усиления PI согласно фиг.10, которая состоит из этапов S20-S24, так чтобы задавать коэффициент усиления P Kp и коэффициент усиления I Ki в соответствии со значением флага FLG, заданным посредством блока BL8 определения угла поворота, со ссылкой на таблицу соответствия коэффициентов усиления P и таблицу соответствия коэффициентов усиления I соответственно. То есть таблица соответствия коэффициентов усиления P и таблица соответствия коэффициентов усиления I показаны на фиг.11, и когда значение флага FLG равно 0, коэффициент усиления P Kp и коэффициент усиления I Ki задаются равными обычным константам Kp1 и Ki1 соответственно. Когда значение флага FLG равно 1, коэффициент усиления P Kp и коэффициент усиления I Ki задаются равными константам Kp2 и Ki2 с учетом анормального шума соответственно.
Если управление электродвигателем 15 отрегулировано так, что анормальный шум не образуется от рулевого механизма (состоящего из электродвигателя 15, механизма 16 "винт-шариковая гайка" и зубчатой рейки 14) в режиме, когда управляющая реактивность электродвигателя 15 является высокой, а абсолютное значение |θ| фактического угла θ поворота - небольшим, таблица соответствия коэффициентов усиления P и таблица соответствия коэффициентов усиления I подготавливаются таким образом, чтобы константы Kp2 и Ki2 с учетом шума допускали меньшие значения, чем обычные константы Kp1 и Ki1, как в случае таблиц соответствия коэффициентов усиления по фиг.4A и 4B. Между тем, в случае если управление электродвигателем 15 отрегулировано так, что анормальный шум не образуется из рулевого механизма в режиме, когда управляющая реактивность электродвигателя 15 является низкой, а абсолютное значение |θ| фактического угла θ поворота - небольшим, таблица соответствия коэффициентов усиления P и таблица соответствия коэффициентов усиления I подготавливаются таким образом, чтобы константы Kp2 и Ki2 с учетом шума допускали большие значения, чем обычные константы Kp1 и Ki1, как в случае таблиц соответствия коэффициентов усиления по фиг.6A и 6B. Следует отметить, что в примерах управления, описываемых выше, константы Kp1, Ki1, Kp2 и Ki2 также используются и задаются вышеописанным способом.
Как описано выше, во втором примере управления, когда абсолютное значение |θ| фактического угла θ поворота возрастает, коэффициент усиления P Kp и коэффициент усиления I Ki переключаются с обычных констант Kp1 и Ki1 на константы Kp2 и Ki2 с учетом шума, как в случае вышеописанного первого примера управления. Следовательно, во втором примере управления, как и в случае первого примера управления, всегда поддерживается хорошее "чувство руля", даже когда фактический угол θ поворота изменяется, и формирование анормального шума из рулевого механизма, состоящего из механизма 16 "винт-шариковая гайка" и зубчатой рейки 14, всегда подавляется, даже когда фактической угол θ поворота изменяется.
c) Третий пример управления
Далее будет описан третий пример управления. На фиг.12 показана функциональная блок-схема электронного блока 24 управления согласно этому третьему примеру управления. Блок-схема согласно фиг.12 отличается от блок-схемы согласно фиг.8, относящейся ко второму варианту осуществления, тем, что блок BL8 определения угла поворота заменен блоком BL9 вычисления скорости поворота и блоком BL10 определения условий изменения коэффициента усиления. Поскольку остальные части, в том числе блок BL6 задания коэффициентов усиления PI, идентичны частям на фиг.8, описываются только части, отличающиеся от второго примера управления, а описание остальных частей не повторяется.
Блок BL9 вычисления скорости поворота различает, в отношении времени, фактический угол θ поворота, запрошенный от датчика 22 угла поворота, и вычисляет скорость ω поворота руля 11 (эквивалентную скорости поворота левого и правого передних колес FW1 и FW2 и скорости вращения электродвигателя 15). Блок BL10 определения условий изменения коэффициента усиления многократно приводит в исполнение через предварительно заданные короткие интервалы программу определения условий изменения коэффициента усиления по фиг.13, которая состоит из этапов S30-S36, с тем, чтобы присвоить флагу FLG значение 0 или 1 в соответствии с фактическим углом θ поворота и скоростью ω поворота. То есть блок BL10 определения условий изменения коэффициента усиления запрашивает фактический угол θ поворота от датчика 22 угла поворота и вычисленную скорость ω поворота и присваивает флагу FLG значение 0, когда абсолютное значение |θ| запрошенного фактического угла θ поворота равно или меньше заданного угла θ1 поворота либо когда абсолютное значение |ω| запрошенной скорости ω поворота равно или больше предварительно определяемой скорости ω1 поворота (например, 100 градусов/с). Блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 1, когда абсолютное значение |θ| фактического угла θ поворота больше заданного угла θ1 поворота, а абсолютное значение |ω| скорости ω поворота меньше предварительно заданной скорости ω1 поворота.
В третьем примере управления, хотя коэффициент усиления P Kp и коэффициент усиления I Ki переключаются согласно второму примеру управления, коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 к константам Kp2 и Ki2 с учетом шума, даже когда абсолютное значение |θ| фактического угла θ поворота превышает предварительно заданный угол θ1 поворота, если только абсолютное значение |ω| скорости ω поворота не меньше предварительно заданной скорости ω1 поворота. Как результат, даже когда руль 11 внезапно дополнительно поворачивается в режиме, когда руль 11 повернут до большого угла, управляющая реактивность электродвигателя 15 надлежащим образом регулируется, посредством чего формирование анормального шума и возникновение неисправности в рулевом механизме может быть предотвращено.
В частности, в случае, если управление электродвигателем 15 отрегулировано таким образом, что анормальный шум образуется из рулевого механизма в режиме, когда управляющая реактивность электродвигателя 15 является высокой, а абсолютное значение |θ| фактического угла θ поворота - небольшим, когда руль 11 поворачивается на высокой скорости в режиме, где абсолютное значение |θ| является большим, в некоторых случаях требуется внезапное изменение напряжения (тока). В этом случае, если управляющая реактивность электродвигателя 15 слабая, анормальный шум может образоваться из рулевого механизма и в нем может возникать шум. Тем не менее, согласно третьему примеру управления в этом случае коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 на константы Kp2 и Ki2 с учетом шума; то есть коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются от высоких значений к низким значениям, так что управляющая реактивность электродвигателя 15 поддерживается на заданном высоком уровне и предотвращаются образование анормального шума и возникновение сбоя в рулевом механизме.
Между тем, в случае, если управление электродвигателем 15 отрегулировано таким образом, что анормальный шум образуется из рулевого механизма в режиме, когда управляющая реактивность электродвигателя 15 является низкой, а абсолютное значение |θ| фактического угла θ поворота - небольшим, когда руль 11 поворачивается на высокой скорости в режиме, где абсолютное значение |θ| большое, в некоторых случаях требуется внезапное изменение напряжения (тока). В этом случае, если управляющая реактивность электродвигателя 15 резко возрастает, анормальный шум может образоваться вследствие разности реактивности между электродвигателем 15 и рулевым механизмом, и может возникать сбой системы. Тем не менее, в этом случае коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 на константы Kp2 и Ki2 с учетом шума; то есть коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются от низких значений к высоким значениям, так что управляющая реактивность электродвигателя 15 не возрастает внезапно в чрезмерной степени и предотвращаются образование анормального шума и возникновение сбоя в рулевом механизме.
Следует отметить, что третий пример управления может быть модифицирован таким образом, чтобы обеспечивать запаздывание в регулировании изменения коэффициента усиления P Kp и коэффициента усиления I Ki в соответствии с фактическим углом θ поворота и запрошенной скоростью ω поворота. В этой модификации вместо программы определения условий изменения коэффициента усиления согласно фиг.13 блок BL10 определения условий изменения коэффициента усиления многократно приводит в исполнение через заданные короткие интервалы программу определения условий изменения коэффициента усиления по фиг.14.
В этой программе определения условий изменения коэффициента усиления после начала приведения в исполнение программы на этапе S40 блок BL10 определения условий изменения коэффициента усиления запрашивает фактический угол θ поворота и скорость ω поворота на этапе S41. Посредством обработки на этапах S42-S46 блок BL10 определения условий изменения коэффициента усиления присваивает флагу EFL конечного условия значение 0 или 1 в соответствии с изменением фактического угла θ поворота. То есть, как показано на фиг.15A, в режиме, если флагу EFL конечного условия присвоено значение 0, блок BL10 определения условий изменения коэффициента усиления изменяет значение флага EFL на 1, когда абсолютное значение |θ| фактического угла θ поворота превышает заданный угол θ1 поворота (например, 500 градусов). Между тем, в режиме, если флагу EFL конечного условия присвоено значение 1, блок BL10 определения условий изменения коэффициента усиления изменяет значение флага EFL на 0, когда абсолютное значение |θ| фактического угла θ поворота становится меньше заданного угла θ2 поворота (например, 490 градусов), который меньше заданного угла θ1 поворота.
Дополнительно посредством обработки на этапах S48-S52 блок BL10 определения условий изменения коэффициента усиления присваивает флагу VFL условия скорости поворота значение 0 или 1 в соответствии с изменением скорости ω поворота. То есть, как показано на фиг.15B, в режиме, если флагу VFL условия скорости поворота присвоено значение 0, блок BL10 определения условий изменения коэффициента усиления изменяет значение флага VFL на 1, когда абсолютное значение |ω| запрошенной скорости ω поворота становится меньше заданной скорости ω1 поворота (например, 100 градусов/с). Между тем, в режиме, если флагу VFL условия скорости поворота присвоено значение 1, блок BL10 определения условий изменения коэффициента усиления изменяет значение флага VFL условия скорости поворота на 0, когда абсолютное значение |ω| запрошенной скорости ω поворота становится больше заданной скорости ω2 поворота (например, 200/с градусов), которая меньше заданной скорости ω1 поворота.
Посредством обработки на этапах S47 и S53-S55 блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 0, когда флаг EFL конечного условия равен 0 или флаг VFL условия скорости поворота равен 0. Между тем, блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 1, когда флаг EFL конечного условия равен 1 или флаг VFL условия скорости поворота равен 1. Блок BL6 задания коэффициента усиления PI изменяет коэффициент усиления P Kp и коэффициент усиления I Ki в соответствии с этим флагом FLG, как и в случае третьего примера управления. Как результат, привносится запаздывание в регулирование изменения коэффициента усиления P Kp и коэффициента усиления I Ki в соответствии с изменениями фактического угла θ поворота и скорости ω поворота.
Согласно этой модификации третьего примера управления частота переключения коэффициента усиления P Kp и коэффициента усиления I Ki снижается в сравнении с изменениями фактического угла θ поворота и скорости ω поворота. Как результат, частое переключение коэффициента усиления P Kp и коэффициента усиления I Ki, то есть снижается частое переключение возбуждающего тока, подаваемого в электродвигатель 15, и более эффективно подавляется образование анормального шума в рулевом механизме.
d) Четвертый пример управления
Далее будет описан четвертый пример управления. На фиг.16 показана функциональная блок-схема электронного блока 24 управления согласно этому четвертому примеру управления. Блок-схема согласно фиг.16 отличается от блок-схемы согласно фиг.12, связанной с третьим примером управления, тем, что блок BL9 вычисления скорости поворота опущен и вместо скорости ω поворота фактическое значение I тока, которое представляет ток, протекающий через электродвигатель 15 и определяемый посредством датчика 25a тока, вводится в блок BL10 определения условий изменения коэффициента усиления. Поскольку остальные части идентичны частям на фиг.12, описываются только части, отличающиеся от третьего примера управления, и описание остальных частей не повторяется.
Блок BL10 определения условий изменения коэффициента усиления многократно приводит в исполнение через заданные короткие интервалы программу определения условий изменения коэффициента усиления по фиг.17, которая состоит из этапов S30-S36, аналогичных этапам по фиг.13, но при этом этапы S31 и S33 заменены на этапы S31a и S33a. На этапе S31a блок BL10 определения условий изменения коэффициента усиления запрашивает фактическое значение I тока из датчика 25a тока вместо скорости ω поворота, используемой в третьем примере управления. На этапе S33a блок BL10 определения условий изменения коэффициента усиления определяет, больше или нет абсолютное значение |I| фактического значения I тока заданного значения I1 тока (например, 30 A). Следует отметить, что заданное значение I1 тока соответствует току, который протекает через электродвигатель 15, когда руль 11 поворачивается до угла поворота примерно ±500 градусов в режиме, когда скорость V транспортного средства равна примерно 10 км/ч (когда переключение коэффициента усиления P Kp и коэффициента усиления I Ki выполнено).
Посредством приведения в исполнение программы определения условий изменения коэффициента усиления по фиг.17 блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 0, когда абсолютное значение |θ| фактического угла θ поворота равно или меньше заданного угла θ1 поворота или когда абсолютное значение |I| фактического значения I тока равно или меньше заданного значения I1 тока. Дополнительно блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 1, когда абсолютное значение |θ| фактического угла θ поворота больше заданного угла θ1 поворота, а абсолютное значение |I| фактического значения I тока больше заданного фактического значения I1 тока.
В этом четвертом примере управления, хотя коэффициент усиления P Kp и коэффициент усиления I Ki переключаются согласно второму примеру управления, коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 к константам Kp2 и Ki2 с учетом шума, даже когда абсолютное значение |θ| фактического угла θ поворота превышает заданный угол θ1 поворота, если только абсолютное значение |I| фактического значения I тока не станет больше заданного фактического значения I1 тока. Другими словами, даже когда абсолютное значение |θ| фактического угла θ поворота становится примерно равным заданному углу θ1 поворота, если скорость V транспортного средства высокая, коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 к константам Kp2 и Ki2 с учетом шума, поскольку абсолютное значение |I| фактического значения I тока не возрастает (см. фиг.3). Как результат, даже когда обычные константы Kp1 и Ki1 и константы Kp2 и Ki2 с учетом шума заданы таким образом, чтобы предотвращать формирование анормального шума из рулевого механизма в течение периодов, в которых транспортное средство останавливается или перемещается на очень низкой скорости, а руль 11 поворачивается в значительной степени, коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 к константам Kp2 и Ki2 с учетом шума в течение периодов, в которых транспортное средство перемещается на высокой скорости, посредством чего ухудшение "чувства руля" может быть предотвращено.
Следует отметить, что четвертый пример управления может быть модифицирован таким образом, чтобы обеспечивать запаздывание в регулирование изменения коэффициента усиления P Kp и коэффициента усиления I Ki в соответствии с фактическим углом θ поворота и фактическим значением I тока. В этой модификации вместо программы определения условий изменения коэффициента усиления по фиг.17 блок BL10 определения условий изменения коэффициента усиления многократно приводит в исполнение через заданные короткие интервалы программу, модифицированную из программы определения условий изменения коэффициента усиления согласно фиг.14.
В программе, модифицированной из программы определения условий изменения коэффициента усиления согласно фиг.14, блок BL10 определения условий изменения коэффициента усиления запрашивает фактическое значение I тока вместо скорости ω поворота на этапе S41 и выполняет обработку определения согласно этапу S33a по фиг.17 вместо обработки определения согласно этапу S49. Дополнительно вместо выполнения обработки определения согласно этапу S50 блок BL10 определения условий изменения коэффициента усиления определяет, меньше или нет абсолютное значение |I| фактического значения I тока заданного значения I2 тока, которое меньше заданного значения I1 тока. Когда абсолютное значение |I| фактического значения I тока меньше заданного значения I2 тока, блок BL10 определения условий изменения коэффициента усиления переходит к этапу S52. Когда абсолютное значение |I| фактического значения I тока равно или больше заданного значения I2 тока, блок BL10 определения условий изменения коэффициента усиления переходит к этапу S53. Следует отметить, что в этом случае указанный флаг VFL условия скорости поворота должен читаться как флаг VFL условия тока.
Как результат, согласно этой модификации четвертого примера управления частота переключения коэффициента усиления P Kp и коэффициента усиления I Ki снижается по сравнению с изменениями фактического угла θ поворота и фактического значения I тока. Следовательно, частое переключение коэффициента усиления P Kp и коэффициента усиления I Ki, то есть снижается частое переключение возбуждающего тока, подаваемого в электродвигатель 15, и более эффективно подавляется образование анормального шума в рулевом механизме.
В четвертом примере управления и его модификации фактическое значение I тока используется для регулирования переключения коэффициента усиления P Kp и коэффициента усиления I Ki. Тем не менее, вместо фактического значения I тока, которое представляет ток, протекающий через электродвигатель 15, может быть использовано целевое значение I* тока, поскольку целевое значение I* тока примерно равно фактическому значению I тока.
e) Пятый пример управления
Далее будет описан пятый пример управления. На фиг.18 показана функциональная блок-схема электронного блока 24 управления согласно этому пятому примеру управления. Блок-схема согласно фиг.18 отличается от блок-схемы согласно фиг.12, связанной с третьим примером управления, тем, что блок BL11 вычисления скорости изменения тока используется вместо блока BL9 вычисления скорости поворота и вместо скорости ω поворота скорость Irt изменения тока, вычисляемая посредством блока BL11 вычисления скорости изменения тока, вводится в блок BL10 определения условий изменения коэффициента усиления. Поскольку остальные части идентичны частям на фиг.12, описываются только части, отличающиеся от третьего примера управления, и описание остальных частей не повторяется.
Блок BL11 вычисления скорости изменения тока многократно приводит в исполнение через заданные короткие интервалы программу вычисления скорости изменения тока по фиг.19, которая состоит из этапов S60-S65, чтобы вычислять в качестве скорости Irt изменения тока отношения скорости изменения целевого значения I* тока к скорости изменения крутящего момента T от руля. В частности, на этапе S61 блок BL11 вычисления скорости изменения тока запрашивает крутящий момент T от руля, определяемый посредством датчика 21 крутящего момента от руля, и целевое значение I* тока, определенное посредством блока BL1 определения целевого значения тока. Затем на этапе S62 блок BL11 вычисления скорости изменения тока вычитает крутящий момент Told от руля во время предыдущей обработки из крутящего момента Tnew от руля во время текущей обработки и вычисляет, в качестве изменения ΔT крутящего момента, абсолютное значение |Tnew-Told| результата вычитания Tnew-Told. Далее на этапе S63 блок BL11 вычисления скорости изменения тока вычитает целевое значение I*old тока во время предыдущей обработки из целевого значения I*new тока во время текущей обработки и вычисляет, в качестве изменения ΔI*, абсолютное значение |I*new-I*old| результата вычитания I*new-I*old. После этого на этапе S64 блок BL11 вычисления скорости изменения тока вычисляет скорость Irt изменения тока посредством деления целевого изменения ΔI* тока на изменение ΔT крутящего момента.
Блок BL10 определения условий изменения коэффициента усиления многократно приводит в исполнение через заданные короткие интервалы программу определения условий изменения коэффициента усиления по фиг.20, которая состоит из этапов S30-S36, аналогичных этапам по фиг.13, но при этом этапы S31 и S33 заменены на этапы S31b и S33b. На этапе S31b блок BL10 определения условий изменения коэффициента усиления запрашивает скорость Irt изменения тока, вычисленную посредством блока BL11 вычисления скорости изменения тока, вместо скорости ω поворота, используемой в третьем примере управления. На этапе S33b блок BL10 определения условий изменения коэффициента усиления определяет, превышает или нет скорость Irt изменения тока заданную скорость Irt1 изменения тока (например, 200 A/Nm).
Посредством приведения в исполнение программы определения условий изменения коэффициента усиления согласно фиг.20 блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 0, когда абсолютное значение |θ| запрошенного фактического угла θ поворота равно или меньше заданного угла θ1 поворота, или когда скорость Irt изменения тока равна или меньше заданной скорости Irt1 изменения тока. Дополнительно блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 1, когда абсолютное значение |θ| фактического угла θ поворота больше заданного угла θ1 поворота, а скорость Irt изменения тока больше заданной скорости Irt1 изменения тока.
В этом шестом примере управления, хотя коэффициент усиления P Kp и коэффициент усиления I Ki переключаются согласно второму примеру управления, коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 к константам Kp2 и Ki2 с учетом шума, даже когда абсолютное значение |θ| фактического угла θ поворота превышает заданный угол θ1 поворота, если только скорость Irt изменения тока не становится больше заданной скорости Irt1 изменения тока. Скорость Irt изменения тока представляет модуль изменения крутящего момента, формируемый посредством электродвигателя для требуемого вспомогательного крутящего момента, то есть режима, когда анормальный шум с большой вероятностью образуется посредством увеличения его значения. Когда скорость Irt изменения тока является небольшой, переключение коэффициента усиления P Kp и коэффициента усиления I Ki от обычных констант Kp1 и Ki1 к константам Kp2 и Ki2 с учетом шума запрещено. Когда скорость Irt изменения тока возрастает, переключение коэффициента усиления P Kp и коэффициента усиления I Ki разрешено. Как результат, коэффициент усиления P Kp и коэффициент усиления I Ki становятся проще переключаемыми с обычных констант Kp1 и Ki1 на константы Kp2 и Ki2 с учетом шума в режиме, когда с большой вероятностью образуется анормальный шум, посредством чего снижение анормального шума и хорошее "чувство руля" реализуются одновременно.
Следует отметить, что пятый пример управления может быть модифицирован таким образом, чтобы обеспечивать запаздывание в регулирование изменения коэффициента усиления P Kp и коэффициента усиления I Ki в соответствии с фактическим углом θ поворота и фактическим значением I тока. В этой модификации вместо программы определения условий изменения коэффициента усиления согласно фиг.20 блок BL10 определения условий изменения коэффициента усиления многократно приводит в исполнение через заданные короткие интервалы программу, модифицированную из программы определения условий изменения коэффициента усиления согласно фиг.14.
В программе, модифицированной из программы определения условий изменения коэффициента усиления по фиг.14, блок BL10 определения условий изменения коэффициента усиления запрашивает скорость Irt изменения тока вместо скорости ω поворота на этапе S41 и выполняет обработку определения согласно этапу S33b по фиг.20 вместо обработки определения согласно этапу S49. Дополнительно вместо выполнения обработки определения согласно этапу S50 блок BL10 определения условий изменения коэффициента усиления определяет, меньше или нет скорость Irt изменения тока заданной скорости Irt2 изменения тока, которая меньше заданной скорости Irt1 изменения тока. Если скорость Irt изменения тока меньше заданной скорости Irt2 изменения тока, то блок BL10 определения условий изменения коэффициента усиления переходит к этапу S52. Когда скорость Irt изменения тока равна или больше заданной скорости Irt2 изменения тока, блок BL10 определения условий изменения коэффициента усиления переходит к этапу S53. Следует отметить, что в этом случае вышеописанный флаг VFL условия скорости поворота должен читаться как флаг VFL условия скорости изменения тока.
Как результат, в модификации пятого примера управления частота переключения коэффициента усиления P Kp и коэффициента усиления I Ki для изменений фактического угла θ поворота и скорости Irt изменения тока снижается. Следовательно, частое переключение коэффициента усиления P Kp и коэффициента усиления I Ki, то есть снижается частое переключение возбуждающего тока, подаваемого в электродвигатель 15, посредством чего может подавляться более эффективно образование анормального шума из рулевого механизма.
В пятом примере управления и его модификации целевое значение I* тока используется для вычисления скорости Irt изменения тока. Вместо целевого значения I* тока, которое представляет ток, протекающий через электродвигатель 15, может быть использовано фактическое значение I тока, поскольку целевое значение I* тока примерно равно фактическому значению I тока.
f) Шестой пример управления
Далее будет описан шестой пример управления. На фиг.21 показана функциональная блок-схема электронного блока 24 управления согласно шестому примеру управления. Блок-схема согласно фиг.21 отличается от блок-схемы согласно фиг.12, связанной с третьим примером управления, тем, что блок BL9 вычисления скорости поворота опущен, и вместо скорости ω поворота скорость V транспортного средства, определяемая посредством датчика 23 скорости транспортного средства, вводится в блок BL10 определения условий изменения коэффициента усиления. Поскольку остальные части идентичны частям на фиг.12, описываются только части, отличающиеся от третьего примера управления, и описание остальных частей не повторяется.
Блок BL10 определения условий изменения коэффициента усиления многократно приводит в исполнение через заданные короткие интервалы программу определения условий изменения коэффициента усиления по фиг.22, которая состоит из этапов S30-S36, аналогичных этапам по фиг.13, но при этом этапы S31 и S33 заменены на этапы S31c и S33c. На этапе S31c блок BL10 определения условий изменения коэффициента усиления запрашивает скорость V транспортного средства, определенную посредством датчика 23 скорости транспортного средства, вместо скорости ω поворота, используемой в третьем примере управления. На этапе S33c блок BL10 определения условий изменения коэффициента усиления определяет, меньше или нет скорость V транспортного средств заданной скорости V1 транспортного средства (например, 10 км/ч).
Посредством приведения в исполнение программы определения условий изменения коэффициента усиления согласно фиг.22 блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 0, когда абсолютное значение |θ| запрошенного фактического угла θ поворота равно или меньше заданного угла θ1 поворота или когда скорость V транспортного средства равна или больше заданной скорости V1 транспортного средства. Дополнительно блок BL10 определения условий изменения коэффициента усиления присваивает флагу FLG значение 1, когда абсолютное значение |θ| фактического угла θ поворота больше заданного угла θ1 поворота, а скорость V транспортного средства меньше заданной скорости V1 транспортного средства.
В шестом примере управления, хотя коэффициент усиления P Kp и коэффициент усиления I Ki переключаются согласно второму примеру управления, коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 к константам Kp2 и Ki2 с учетом шума, даже когда абсолютное значение |θ| фактического угла θ поворота превышает заданный угол θ1 поворота, если только скорость V транспортного средства не равна или меньше заданной скорости V1 транспортного средства. Как результат, даже когда обычные константы Kp1 and Ki1 и константы Kp2 и Ki2 с учетом шума заданы таким образом, чтобы предотвращать формирование анормального шума из рулевого механизма в течение периодов, в которых транспортное средство останавливается или перемещается на очень низкой скорости, а руль 11 поворачивается в значительной степени, коэффициент усиления P Kp и коэффициент усиления I Ki не переключаются с обычных констант Kp1 и Ki1 к константам Kp2 и Ki2 с учетом шума в течение периодов, в которых транспортное средство перемещается на высокой скорости, посредством чего может быть предотвращено ухудшение "чувства руля".
Следует отметить, что шестой пример управления может быть модифицирован таким образом, чтобы обеспечивать запаздывание в регулирование изменения коэффициента усиления P Kp и коэффициента усиления I Ki в соответствии с фактическим углом θ поворота и скоростью V транспортного средства. В этой модификации вместо программы определения условий изменения коэффициента усиления согласно фиг.22 блок BL10 определения условий изменения коэффициента усиления многократно приводит в исполнение через заданные короткие интервалы программу, модифицированную из программы определения условий изменения коэффициента усиления согласно фиг.14.
В программе, модифицированной из программы определения условий изменения коэффициента усиления согласно фиг.14, блок BL10 определения условий изменения коэффициента усиления запрашивает скорость V транспортного средства вместо скорости ω поворота на этапе S41 и выполняет обработку определения согласно этапу S33c согласно фиг.22 вместо обработки определения согласно этапу S49. Дополнительно вместо выполнения обработки определения согласно этапу S50 блок BL10 определения условий изменения коэффициента усиления определяет, больше или нет скорость V транспортного средства заданной скорости V2 транспортного средства (например, 20 км/ч), которая больше заданной скорости V1 транспортного средства. Когда скорость V транспортного средства больше заданной скорости V2 транспортного средства, блок BL10 определения условий изменения коэффициента усиления переходит к этапу S52. Когда скорость V транспортного средства равна или меньше заданной скорости V2 транспортного средства, блок BL10 определения условий изменения коэффициента усиления переходит к этапу S53. Следует отметить, что в этом случае вышеописанный флаг VFL условия скорости поворота должен читаться как флаг VFL условия скорости транспортного средства.
Как результат, в модификации шестого примера управления частота переключения коэффициента усиления P Kp и коэффициента усиления I Ki для изменений фактического угла θ поворота и скорости V транспортного средства снижается. Следовательно, частое переключение коэффициента усиления P Kp и коэффициента усиления I Ki, то есть снижается частое переключение возбуждающего тока, подаваемого в электродвигатель 15, посредством чего может эффективно подавляться образование анормального шума из рулевого механизма.
g) Другие модификации
Далее будут описаны другие модификации вышеописанных вариантов осуществления. На фиг.23-28 соответственно показаны функциональные блоки модификаций вышеописанных вариантов осуществления с первого по шестой. На этих функциональных блок-схемах блок BL12 обработки низкочастотной фильтрации размещен на стадии после соответствующего блока BL6 задания коэффициента усиления PI из функциональных блоков примеров управления с первого по шестой, показанных на фиг.2, 8, 12, 16, 18 и 21. Блок BL12 обработки низкочастотной фильтрации последовательно запрашивает коэффициент усиления P Kp и коэффициент усиления I Ki, заданные в блоке BL6 задания коэффициентов усиления PI, и выводит их в блок BL4 регулирования коэффициента усиления P и блок BL5 регулирования коэффициента усиления I после выполнения низкочастотной обработки для коэффициента усиления P Kp и коэффициента усиления I Ki.
Благодаря этой конфигурации коэффициент усиления P Kp и коэффициент усиления I Ki, на которые умножается отклонение ΔI тока и его интегральное значение ∫ΔIdt, принудительно изменяются постепенно, так что даже когда коэффициент усиления P Kp и коэффициент усиления I Ki переключаются, значение E0 управляющего напряжения изменяется плавно и возбуждающий ток, протекающий через электродвигатель 15, также изменяется плавно. Соответственно, даже когда коэффициент усиления P Kp и коэффициент усиления I Ki переключаются, усилие, облегчающее рулевое управление и формируемое посредством электродвигателя 15, изменяется плавно и водитель не чувствует никаких неестественных ощущений, которые водитель в другом случае почувствовал бы при вращении руля 11.
Кроме того, настоящее изобретение не ограничено вышеупомянутыми вариантами осуществления и их модификациями и могут быть выполнены различные модификации в рамках объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2437793C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749924C1 |
| УСТРОЙСТВО УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ | 2014 |
|
RU2630344C2 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО РУЛЕНИЯ | 2021 |
|
RU2754282C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ | 2020 |
|
RU2731400C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2643018C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2643409C2 |
| СИСТЕМА ДЛЯ КОМПЕНСАЦИИ ЭФФЕКТА ЗАКРУЧИВАНИЯ ШИН ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2654434C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643748C2 |
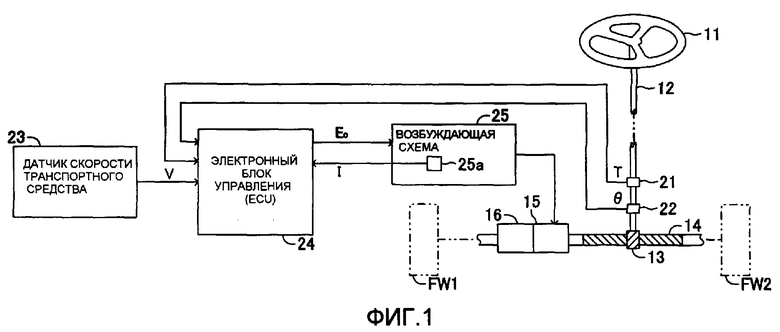
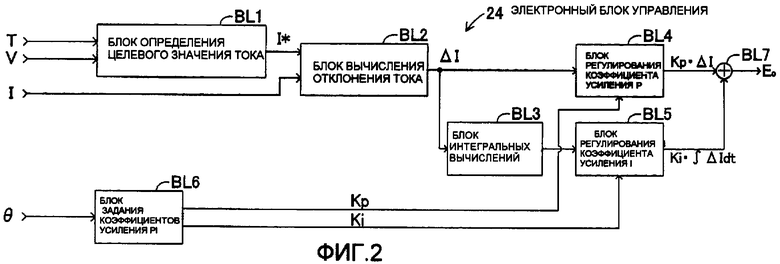
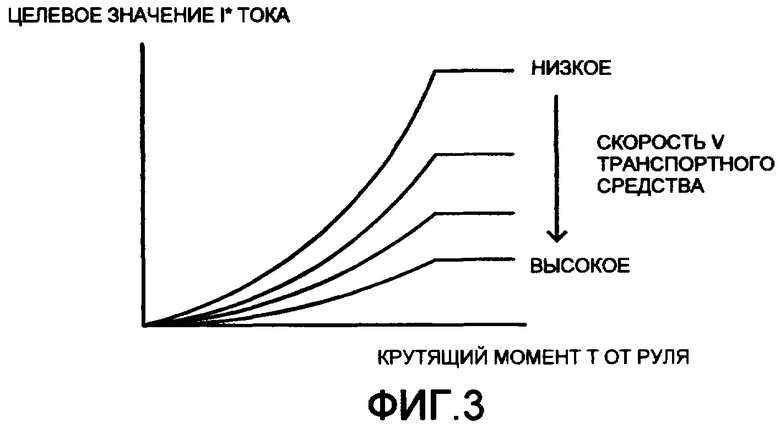
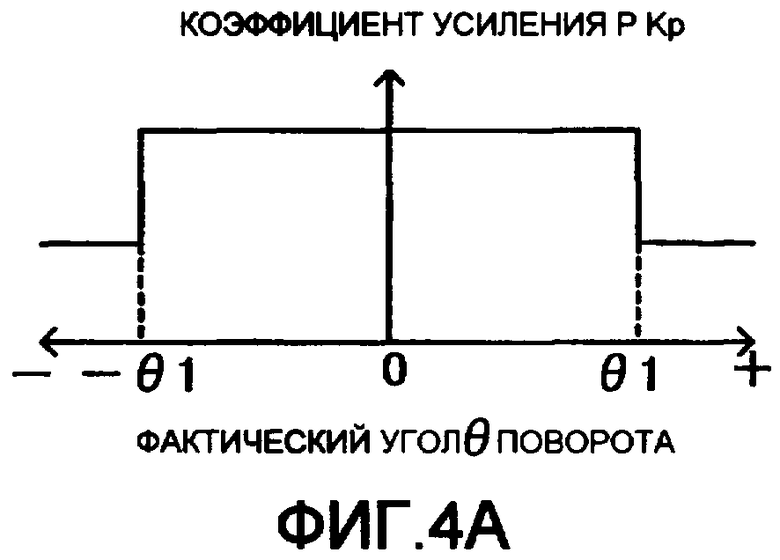
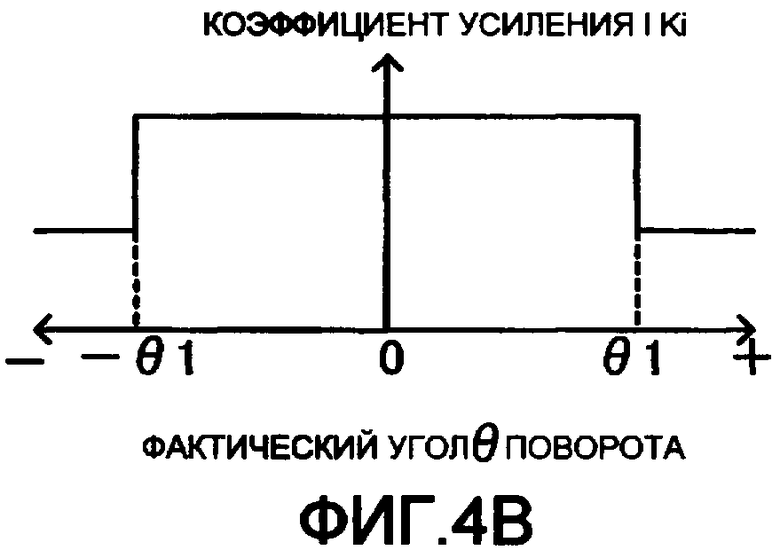
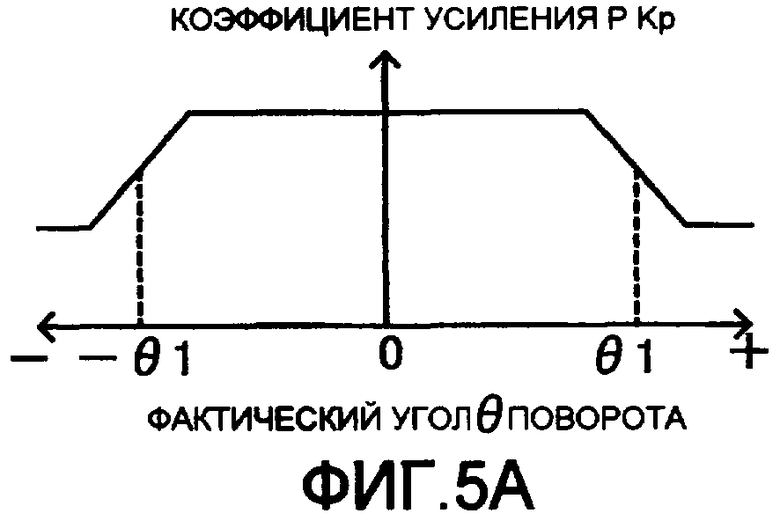
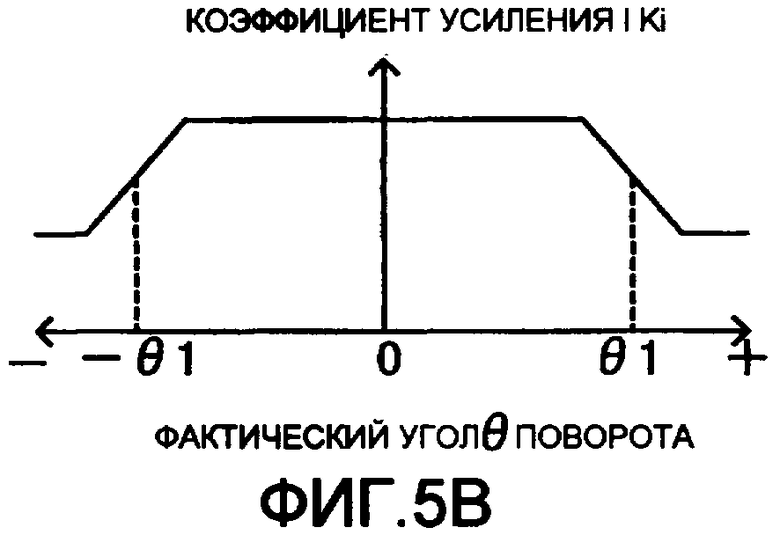

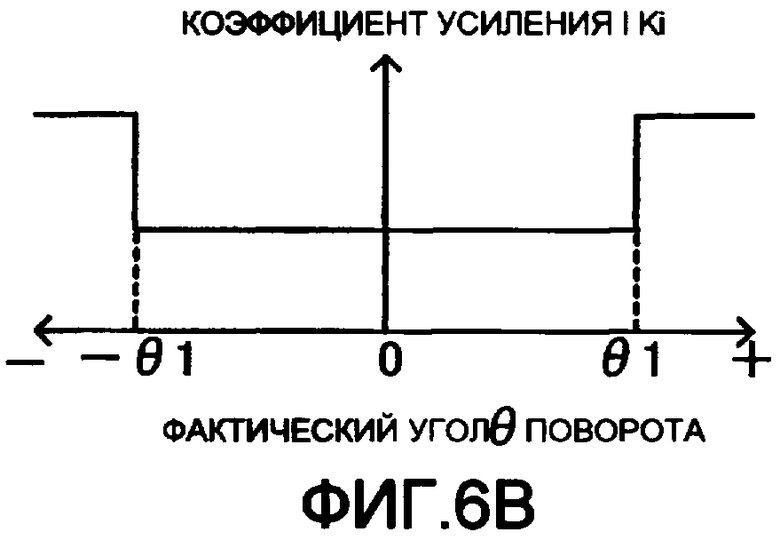

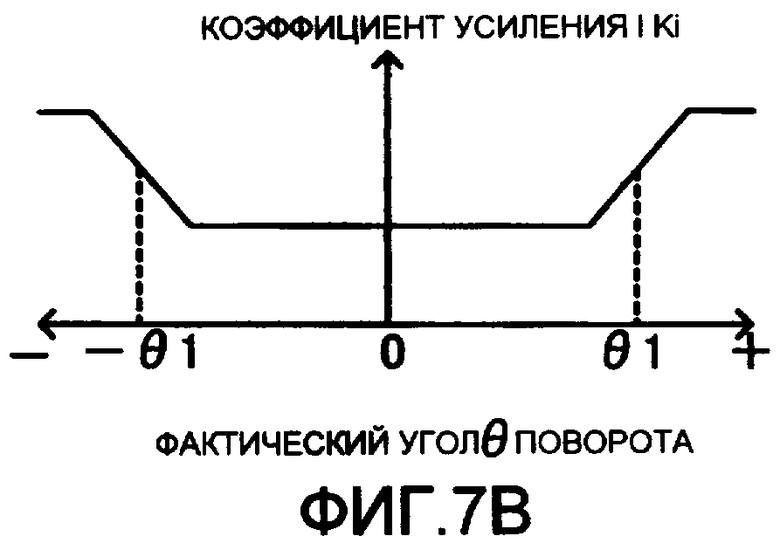
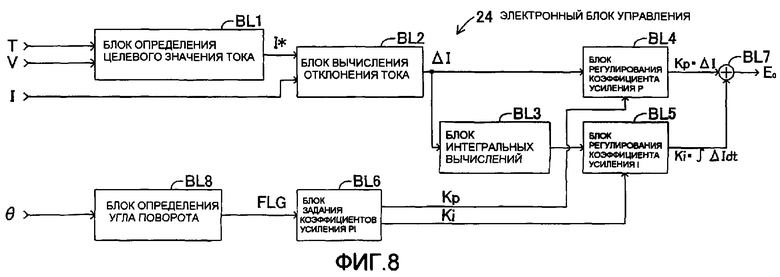
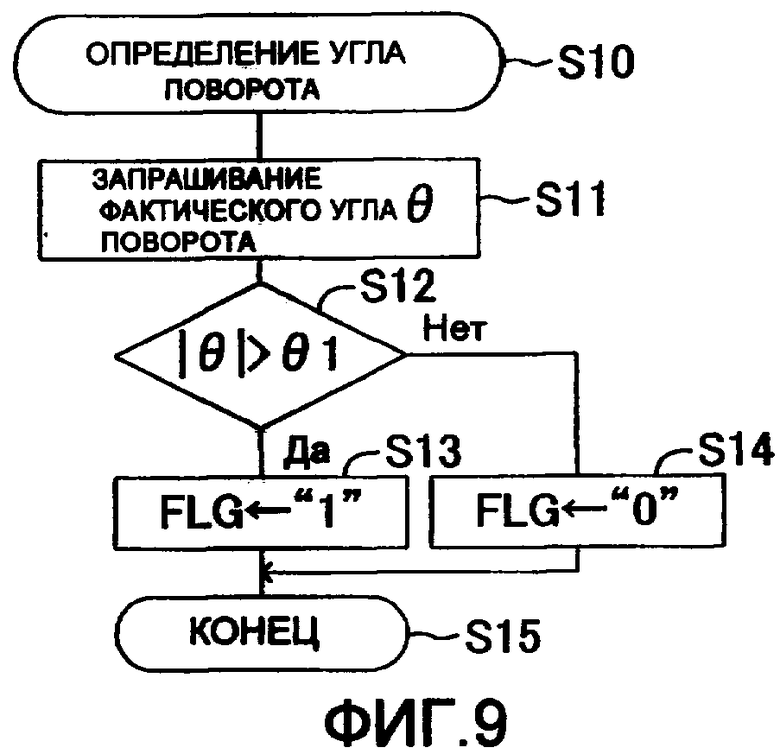
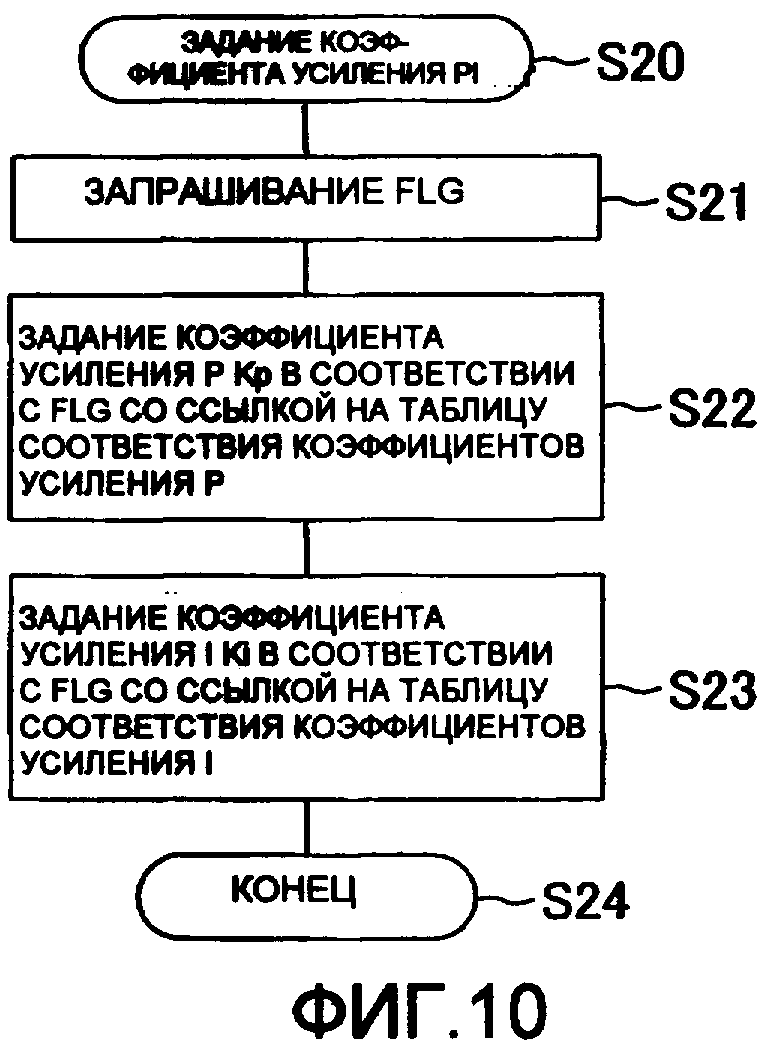
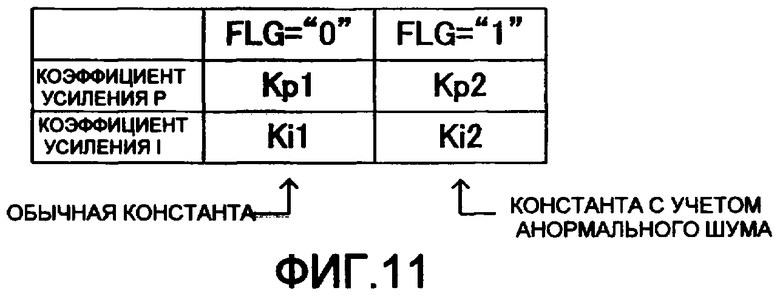
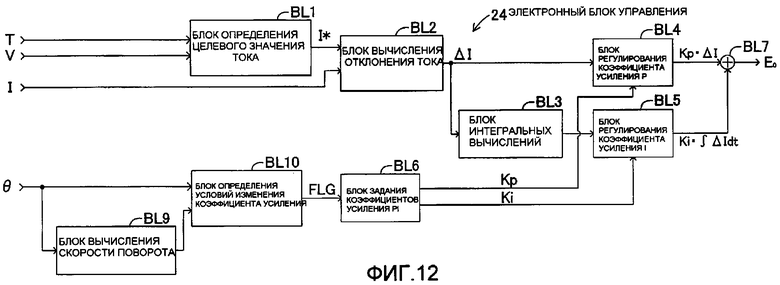
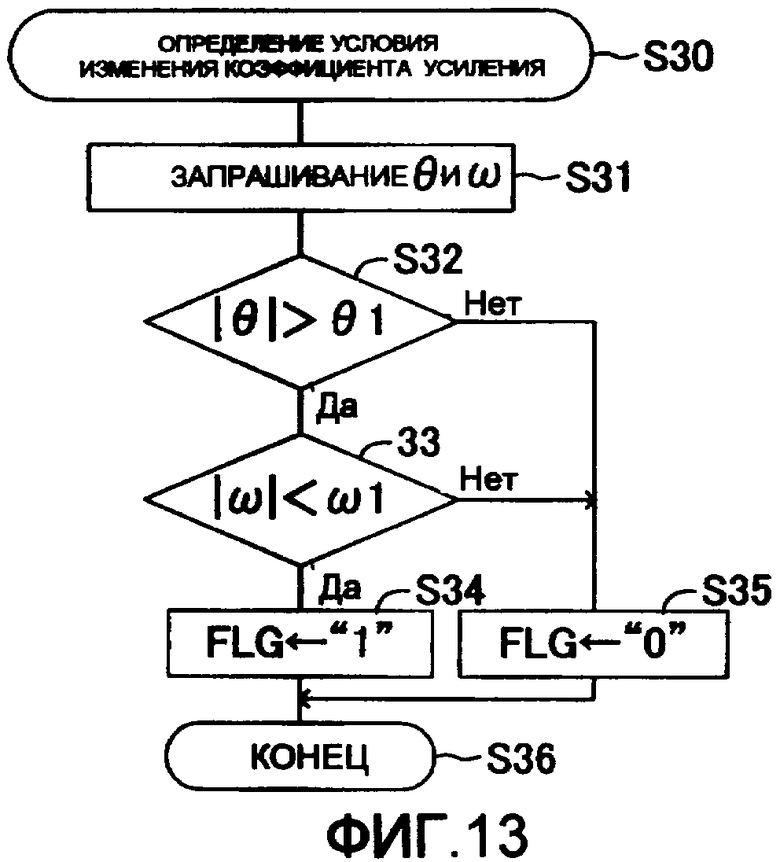
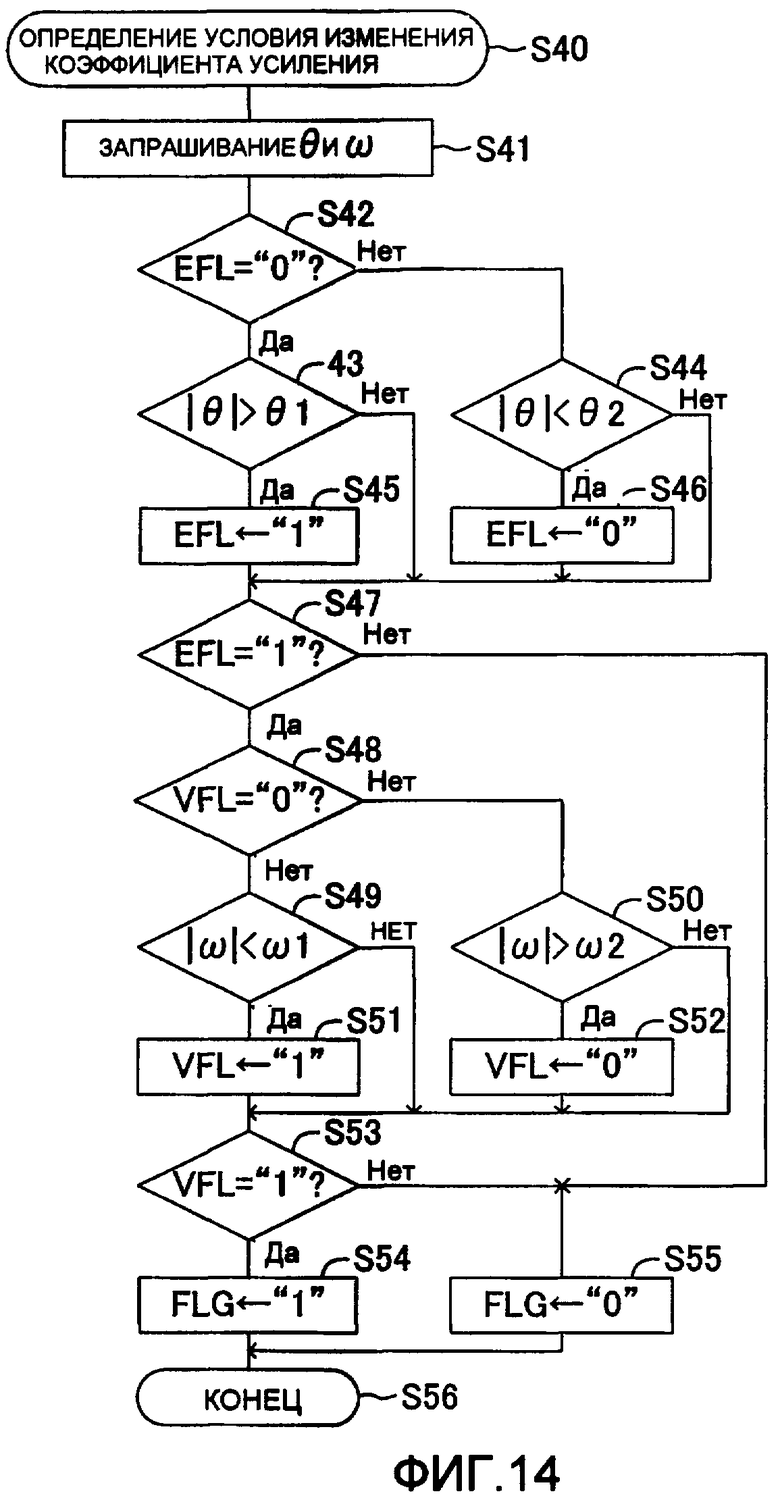
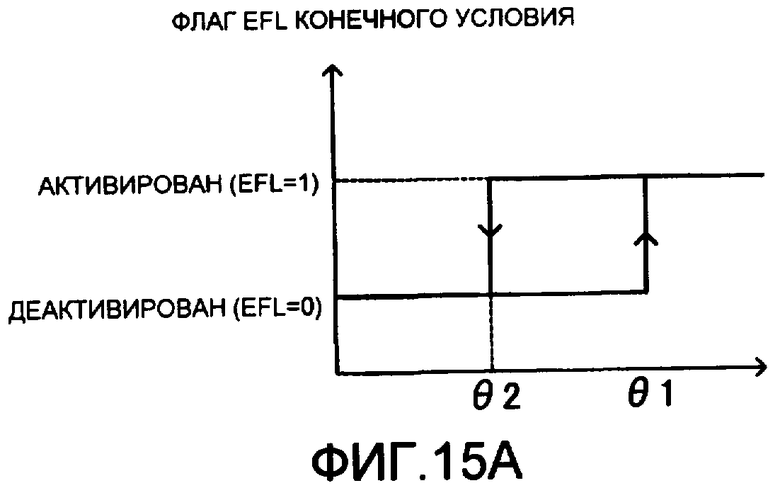
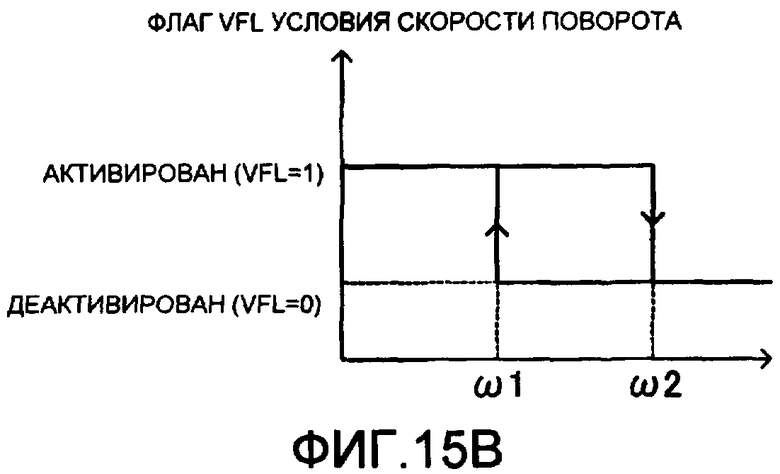
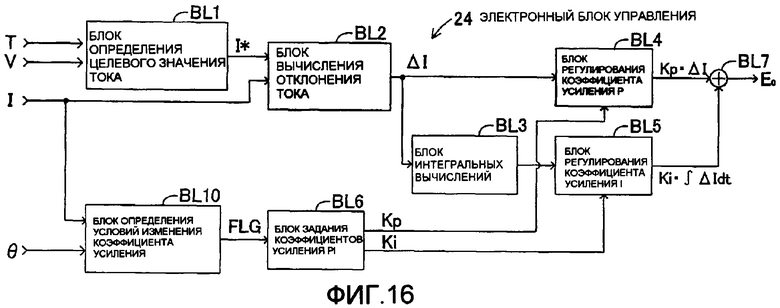
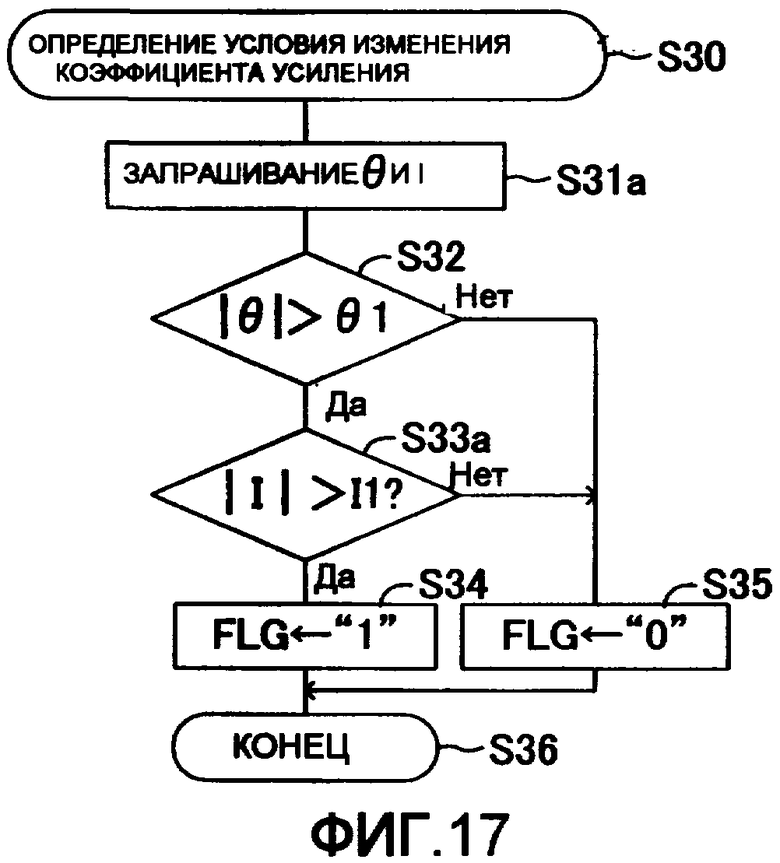
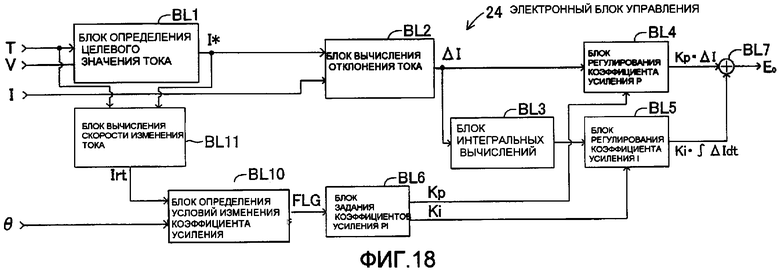
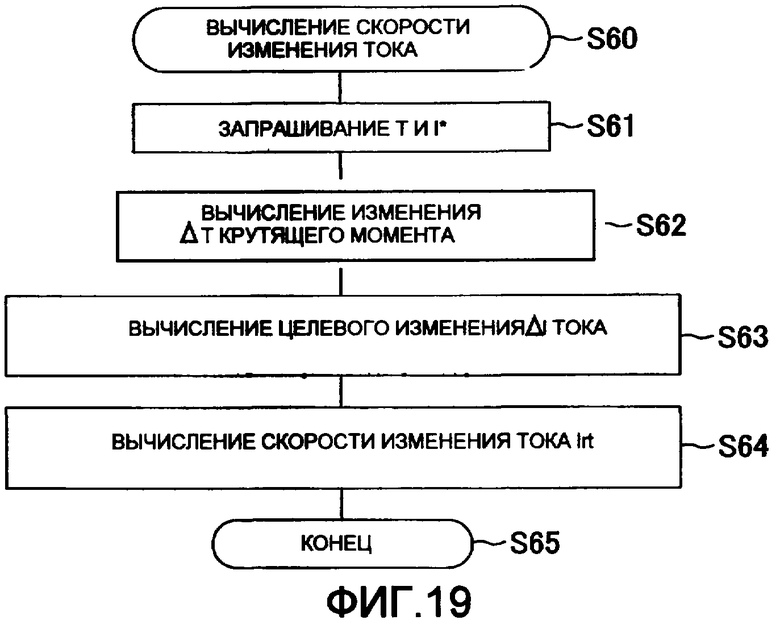
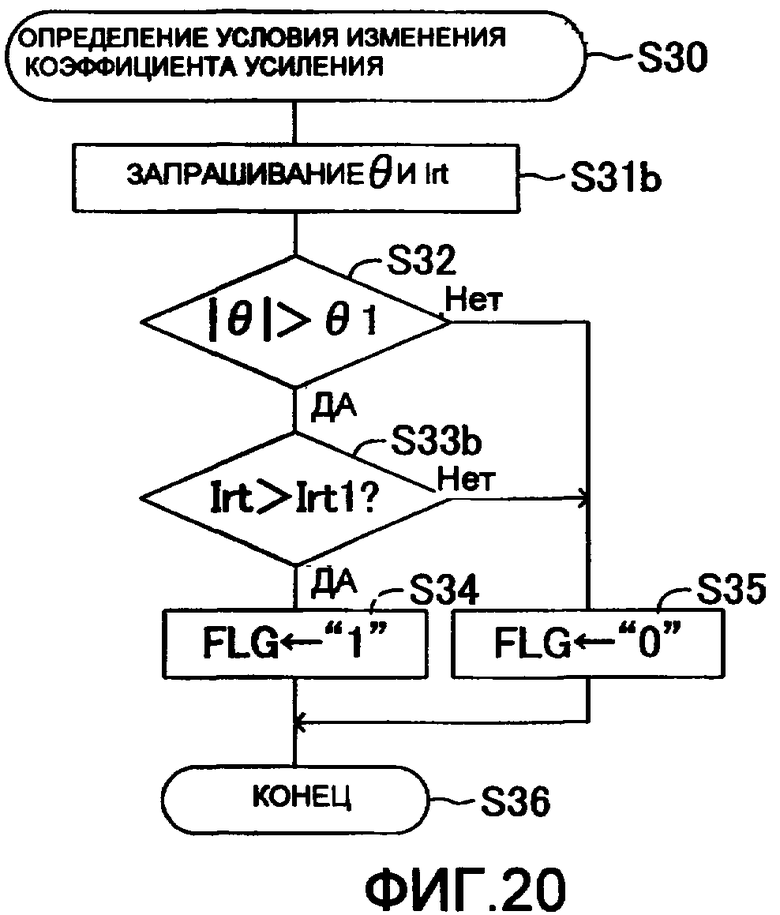
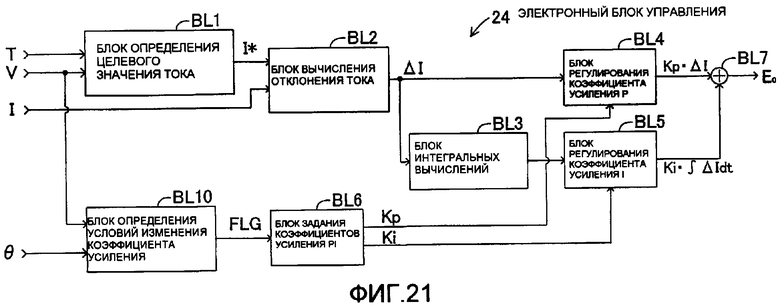
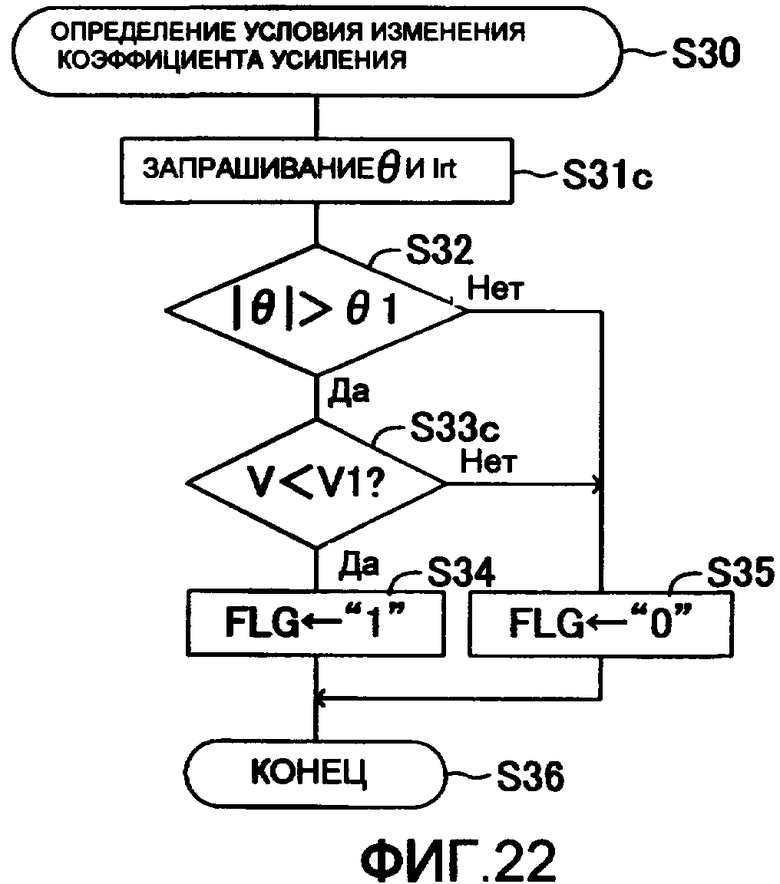
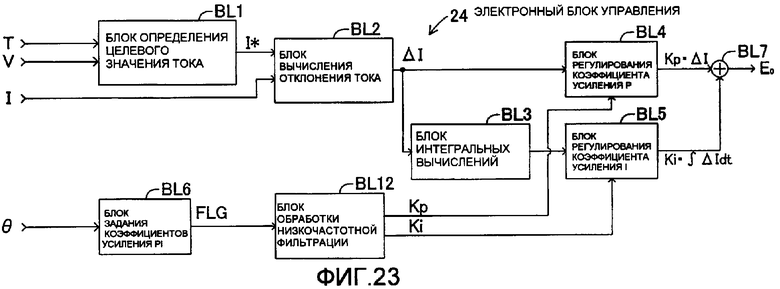
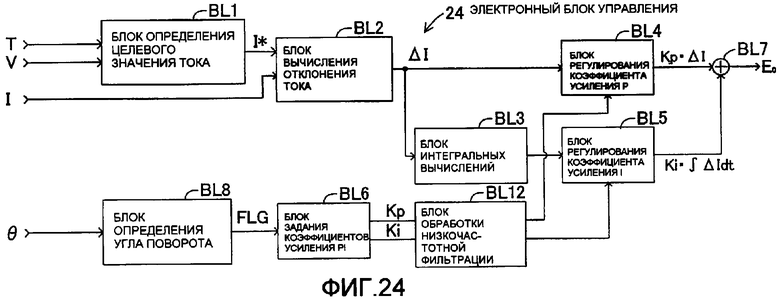
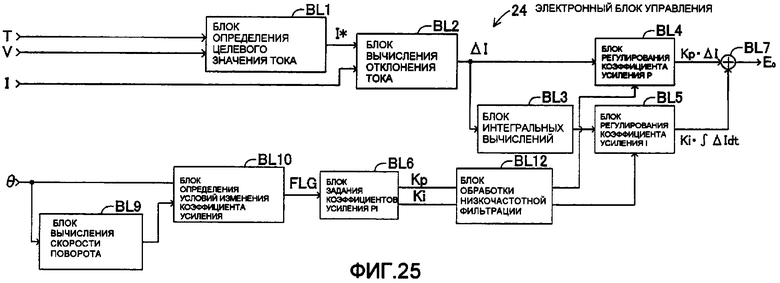
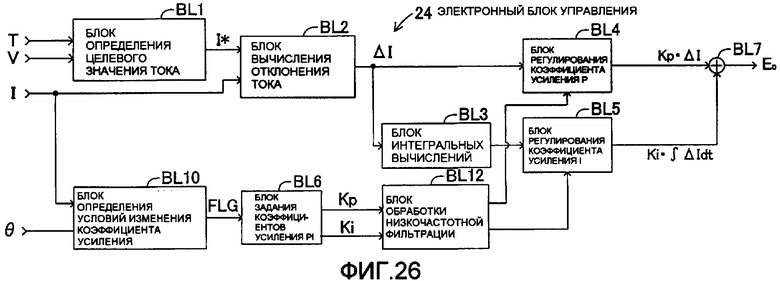
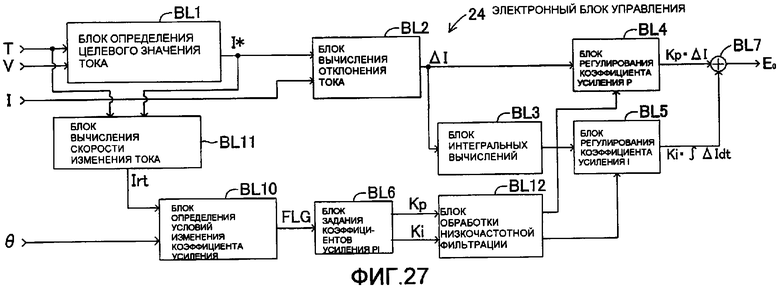
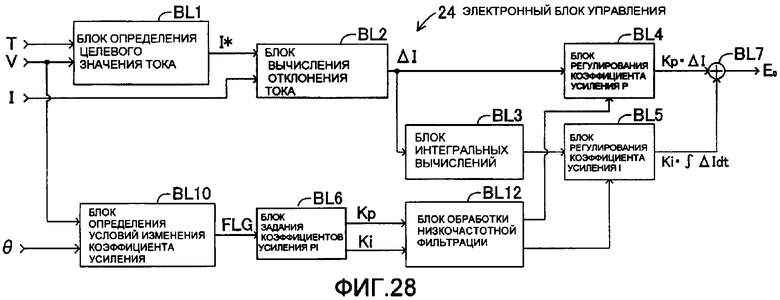
Изобретение относится к устройству, облегчающему рулевое управление транспортным средством. Устройство по первому и второму вариантам содержит средство определения угла поворота, средство изменения коэффициента усиления для изменения коэффициента усиления обратной связи. Устройство по второму варианту дополнительно содержит средство определения скорости поворота руля и средство регулирования изменения коэффициента усиления. Устройство по третьему варианту содержит средство определения крутящего момента от руля, средство определения скорости транспортного средства, средство определения целевого значения тока электродвигателя, средство изменения коэффициента усиления обратной связи, средство регулирования изменения коэффициента усиления. Устройство по четвертому и пятому вариантам содержит средство определения крутящего момента от руля, средство определения скорости транспортного средства, средство определения целевой величины регулирования, средство определения угла поворота руля, средство изменения коэффициента усиления обратной связи. Устройство по четвертому варианту дополнительно содержит средство определения скорости изменения тока. Устройство по пятому варианту дополнительно содержит средство регулирования изменения коэффициента усиления. Технический результат заключается в подавлении образования шума при работе устройства, облегчающего рулевое управление. 5 н. и 8 з.п. ф-лы, 33 ил.
1. Устройство, облегчающее рулевое управление транспортным средством, которое включает в себя электродвигатель для передачи вспомогательного усилия на поворот управляемых колес, выполняемый за счет вращения руля, в котором регулирование с обратной связью выполняется, когда фактическая величина регулирования электродвигателя используется в качестве обратной связи, так что электродвигатель работает в соответствии с целевой величиной регулирования, отличающееся тем, что оно содержит средство определения угла поворота для определения угла поворота руля и средство изменения коэффициента усиления для изменения коэффициента усиления обратной связи, используемого при регулировании с обратной связью, если определяемый угол поворота является большим, до большего значения по сравнению со случаем, когда определяемый угол поворота является малым, чтобы тем самым снизить анормальный шум, который образуется вследствие низкой реактивности регулирования с обратной связью.
2. Устройство по п.1, отличающееся тем, что коэффициентом усиления обратной связи является коэффициент усиления регулирования, касающийся пропорционального элемента и/или интегрального элемента, связанного с регулированием с обратной связью.
3. Устройство по п.1, отличающееся тем, что целевой величиной регулирования электродвигателя является целевое значение тока, подаваемого к электродвигателю, и фактической величиной регулирования электродвигателя является фактическое значение тока, протекающего через электродвигатель и определяемого датчиком тока.
4. Устройство по любому из пп.1-3, отличающееся тем, что оно дополнительно содержит средство определения крутящего момента от руля для определения крутящего момента, прикладываемого к рулю, средство определения скорости транспортного средства для определения скорости транспортного средства и средство определения целевой величины регулирования для определения целевой величины регулирования электродвигателя в соответствии с определяемым крутящим моментом руля и скоростью транспортного средства.
5. Устройство по п.1, отличающееся тем, что средство изменения коэффициента усиления включает в себя средство обработки низкочастотного фильтра для выполнения обработки низкочастотной фильтрации для коэффициента усиления обратной связи, измененного в соответствии с углом поворота.
6. Устройство, облегчающее рулевое управление транспортным средством, которое включает в себя электродвигатель для передачи вспомогательного усилия на поворот управляемых колес, выполняемый за счет вращения руля, в котором регулирование с обратной связью выполняется, когда фактическая величина регулирования электродвигателя используется в качестве обратной связи, так что электродвигатель работает в соответствии с целевой величиной регулирования, отличающееся тем, что оно содержит средство определения угла поворота для определения угла поворота руля, средство изменения коэффициента усиления для изменения коэффициента усиления обратной связи, используемого при регулировании с обратной связью, с первого коэффициента усиления обратной связи на второй коэффициент усиления обратной связи, когда угол поворота, определяемый средством определения угла поворота, превышает заданный угол поворота, и средство определения скорости поворота для определения скорости поворота руля и средство регулирования изменения коэффициента усиления для обеспечения средству изменения коэффициента усиления возможности изменения коэффициента усиления обратной связи, когда скорость поворота, определяемая средством определения скорости поворота, меньше заданной скорости поворота, и запрета на изменение коэффициента усиления обратной связи средством изменения коэффициента усиления, когда определяемая скорость поворота равна или превышает заданную скорость поворота.
7. Устройство по п.6, отличающееся тем, что обеспечивается запаздывание в регулировании изменения коэффициента усиления обратной связи, выполняемое средством изменения коэффициента усиления и средством регулирования изменения коэффициента усиления в соответствии с изменениями угла поворота, определяемыми средством определения угла поворота, и скорости поворота, определяемой средством определения скорости поворота.
8. Устройство, облегчающее рулевое управление транспортным средством, которое включает в себя электродвигатель для передачи вспомогательного усилия на поворот управляемых колес, выполняемый за счет вращения руля, в котором регулирование с обратной связью выполняется, когда фактическое значение тока электродвигателя используется в качестве обратной связи, так что электродвигатель работает в соответствии с целевым значением тока, отличающееся тем, что оно содержит средство определения крутящего момента от руля для определения крутящего момента, прикладываемого к рулю, средство определения скорости транспортного средства для определения скорости транспортного средства, средство определения целевого значения тока для определения целевого значения тока электродвигателя в соответствии с определяемым крутящим моментом руля и скоростью транспортного средства, причем целевое значение тока уменьшается при увеличении скорости транспортного средства, средство определения угла поворота для определения угла поворота руля, средство изменения коэффициента усиления для изменения коэффициента усиления обратной связи, используемого при регулировании с обратной связью, с первого коэффициента усиления обратной связи на второй коэффициент усиления обратной связи, когда угол поворота, определяемый средством определения угла поворота, превышает заданный угол поворота, средство регулирования изменения коэффициента усиления для обеспечения средству изменения коэффициента усиления возможности изменения коэффициента усиления обратной связи, когда ток, протекающий через электродвигатель, превышает заданный ток, и запрета на изменение коэффициента усиления обратной связи средством изменения коэффициента усиления, когда ток, протекающий через электродвигатель, равен или меньше заданного тока.
9. Устройство по п.8, отличающееся тем, что обеспечивается запаздывание в регулировании изменения коэффициента усиления обратной связи, выполняемое средством изменения коэффициента усиления и средством регулирования изменения коэффициента усиления в соответствии с изменениями угла поворота, определяемыми средством определения угла поворота, и тока, протекающего через электродвигатель.
10. Устройство, облегчающее рулевое управление транспортным средством, которое включает в себя электродвигатель для передачи вспомогательного усилия на поворот управляемых колес, выполняемый за счет вращения руля, в котором регулирование с обратной связью выполняется, когда фактическая величина регулирования электродвигателя используется в качестве обратной связи, так что электродвигатель работает в соответствии с целевой величиной регулирования, отличающееся тем, что оно содержит средство определения крутящего момента от руля для определения крутящего момента, прикладываемого к рулю, средство определения скорости транспортного средства для определения скорости транспортного средства, средство определения целевой величины регулирования для определения целевой величины регулирования электродвигателя в соответствии с определяемым крутящим моментом руля и скоростью транспортного средства, средство определения угла поворота для определения угла поворота руля, средство изменения коэффициента усиления для изменения коэффициента усиления обратной связи, используемого при регулировании с обратной связью, с первого коэффициента усиления обратной связи на второй коэффициент усиления обратной связи, когда угол поворота, определяемый средством определения угла поворота, превышает заданный угол поворота, средство определения скорости изменения тока для определения, в качестве скорости изменения тока, отношения скорости изменения тока, протекающего через электродвигатель, к скорости изменения крутящего момента от руля, определенного средством определения крутящего момента от руля, и средство регулирования изменения коэффициента усиления для обеспечения средству изменения коэффициента усиления возможности изменения коэффициента усиления обратной связи, когда скорость изменения тока, определяемая средством определения скорости изменения тока, превышает заданную скорость изменения, и запрета на изменение коэффициента усиления обратной связи средством изменения коэффициента усиления, когда определяемая скорость изменения тока равна или меньше заданной скорости изменения.
11. Устройство по п.10, отличающееся тем, что обеспечивается запаздывание в регулировании изменения коэффициента усиления обратной связи, выполняемое средством изменения коэффициента усиления и средством регулирования изменения коэффициента усиления в соответствии с изменениями угла поворота, определяемыми средством определения угла поворота, и скорости изменения тока, определяемой средством вычисления скорости изменения тока.
12. Устройство, облегчающее рулевое управление транспортным средством, которое включает в себя электродвигатель для передачи вспомогательного усилия на поворот управляемых колес, выполняемый за счет вращения руля, в котором регулирование с обратной связью выполняется, когда фактическая величина регулирования электродвигателя используется в качестве обратной связи, так что электродвигатель работает в соответствии с целевой величиной регулирования, отличающееся тем, что оно содержит средство определения крутящего момента от руля для определения крутящего момента, прикладываемого к рулю, средство определения скорости транспортного средства для определения скорости транспортного средства, средство определения целевой величины регулирования для определения целевой величины регулирования электродвигателя в соответствии с определяемым крутящим моментом руля и скоростью транспортного средства, средство определения угла поворота для определения угла поворота руля, средство изменения коэффициента усиления для изменения коэффициента усиления обратной связи, используемого при регулировании с обратной связью, с первого коэффициента усиления обратной связи на второй коэффициент усиления обратной связи, когда угол поворота, определяемый средством определения угла поворота, превышает заданный угол поворота, средство регулирования изменения коэффициента усиления для обеспечения средству изменения коэффициента усиления возможности изменения коэффициента усиления обратной связи, когда скорость транспортного средства, определяемая средством определения скорости транспортного средства, меньше заданной скорости транспортного средства, и запрета на изменение коэффициента усиления обратной связи средством изменения коэффициента усиления, когда скорость транспортного средства равна или превышает заданную скорость транспортного средства.
13. Устройство по п.12, отличающееся тем, что обеспечивается запаздывание в регулировании изменения коэффициента усиления обратной связи, выполняемое средством изменения коэффициента усиления и средством регулирования изменения коэффициента усиления в соответствии с изменениями угла поворота, определяемыми средством определения угла поворота, и скорости транспортного средства, определяемой средством определения скорости транспортного средства.
| JP 10264838 А, 06.10.1998 | |||
| JP 2001171533 A, 26.06.2001 | |||
| СЕРВОПРИВОД РУЛЕВОГО МЕХАНИЗМА АВТОМОБИЛЯ И РЕГУЛЯТОР ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 2000 |
|
RU2185301C2 |
| Передвижной ковшевой транспортер для выгрузки рыбы | 1934 |
|
SU43837A1 |
| JP 8067266 A, 12.03.1996. | |||

