Перекрестная ссылка на родственные заявки
По настоящей заявке испрашивается приоритет по китайской патентной заявке №200510060049.7, поданной 28 марта 2005 г.
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству качания кристаллизатора установки непрерывной разливки, в частности к усовершенствованию устройства, создающего несинусоидальные колебания.
Кристаллизатор установки непрерывной разливки качается с заранее установленными частотами, формами и амплитудами колебаний, среди которых особенно предпочтительным является несинусоидальное колебательное движение с более низкой скоростью при движении вниз и более высокой скоростью при движении вверх. Такое несинусоидальное колебательное движение может увеличить смазывающий эффект порошковых смесей для кристаллизатора, значительно уменьшить силы трения между затвердевшими корочками и кристаллизатором, уменьшить и устранить трещины, образуемые на затвердевшей корочке, и значительно повысить качество поверхности отлитой заготовки и скорость ее вытягивания. Приводные устройства для такого устройства качания можно разделить на две группы: (1) гидравлические сервосистемы (например, устройство, раскрытое в EP 0468607 A11), которое включает электрогидравлические сервоклапаны для тяжелых режимов работы, гидравлические сервоцилиндры, гидравлические насосы и др., к недостаткам которых относятся сложность, высокая стоимость и затруднительность технического обслуживания; и (2) механические передачи с кривошипами (см. китайский патент № ZL99216172.X и ZL01205318.X). Последний использует горизонтальный двигатель в качестве приводного устройства. Хотя такая механическая передача имеет низкую стоимость, она не может регулировать амплитуды или формы колебаний в оперативном режиме, следовательно, не позволяет осуществлять непрерывную разливку с высокой эффективностью. Кроме того, потребляемая энергия для приведения в действие этих двух типов устройств качания очень высока.
Целью настоящего изобретения является создание устройства качания кристаллизатора, которое позволяет уменьшить потребляемую энергию для приведения в действие данного устройства, а также регулировать частоту, форму и амплитуду колебаний кристаллизатора в оперативном режиме и в котором в качестве приводного устройства используется приводной цилиндр.
Цель настоящего изобретения достигается таким образом, что жесткость поддерживающих наборов пружин регулируется на основе момента инерции приводного цилиндра и качающейся массы таким образом, чтобы собственная частота качающего устройства могла приблизиться к требуемой частоте колебаний, и могло быть обеспечено сбалансированное преобразование между кинетической и потенциальной энергией устройства качания. Следовательно, приводной цилиндр может успешно использоваться в качестве приводного устройства, и благодаря этому можно значительно уменьшить потребляемую энергию.
Гидравлические цилиндры расположены под наборами пружин. Следовательно, количество наборов пружин, которые физически поддерживают качающийся стол, может изменяться таким образом, чтобы собственная частота устройства качания могла приблизиться к частоте колебаний кристаллизатора.
Наборы пружин разделены на ряд сегментов с помощью разделительных устройств, которые могут закрепляться в требуемом положении посредством соответствующих пневматических зажимов. Поэтому длина наборов пружин, которые физически поддерживают качающийся стол, может изменяться таким образом, чтобы собственная частота устройства качания могла изменяться соответствующим образом, приближаясь к частоте колебаний кристаллизатора.
Управляющее устройство обеспечивает сигналы с регулируемыми в оперативном режиме частотами, формами и амплитудами для управления работой приводного цилиндра, который обеспечивает качание кристаллизатора, а также для управления работой гидравлических цилиндров или пневматических зажимов таким образом, чтобы можно было, соответственно, регулировать количество или длину наборов пружин.
Приводной цилиндр, включающий мотор и шариковый ходовой винт, может быть легко запрограммирован для осуществления осевого перемещения в соответствии с определенной диаграммой скоростей. Следовательно, при обеспечении достаточных крутящих моментов или мощностей вертикально расположенный приводной цилиндр является, бесспорно, самым эффективным решением для приведения в действие качающегося стола для обеспечения синусоидальных или несинусоидальных колебаний кристаллизатора, амплитуда, частота и форма которых может регулироваться в оперативном режиме. Однако возвратно-поступательное движение гайки в приводном цилиндре обеспечивается с помощью вращения ротора и винта вперед-назад. Во время этого процесса, в котором происходит быстрое изменение направления вращения с частотой, измеряемой сотнями переключений в минуту, требуются относительно большие крутящие моменты и мощности для обеспечения ускоренного перемещения вверх-вниз относительно тяжелого кристаллизатора и качающегося стола, а также ускоренного вращения вперед-назад ротора и винта с относительно большими моментами инерции. Обычно в последнем случае, то есть для ускоренного вращения ротора и винта, требуются более высокие мощности по сравнению с мощностями, требующимися для ускоренного движения кристаллизатора и качающегося стола. Обеспечение такого большого количества крутящих моментов или мощностей только при помощи одного приводного цилиндра нерационально. Традиционным решением является размещение пружин под вибрационным столом, и жесткость наборов пружин выбирается таким образом, чтобы собственная частота устройства, включающего наборы пружин и качающиеся массы, соответствовала частоте колебаний кристаллизатора. Заявитель провел всесторонний анализ влияний момента инерции приводного цилиндра, массы качающихся частей кристаллизатора и жесткости наборов пружин и установил, что собственная частота fn устройства может быть выражена следующей формулой:
где m - масса качающихся частей кристаллизатора, I - момент инерции приводного цилиндра, d - шаг винта в приводном цилиндре, и k - жесткость наборов пружин. Когда частота колебаний кристаллизатора приближается к fn, можно обеспечить в значительной степени сбалансированное преобразование между потенциальной энергией гравитации качающихся частей кристаллизатора и потенциальной энергией упругости пружин и кинетической энергией вращения приводного цилиндра и кинетической энергией качания кристаллизатора для обеспечения оптимальной компенсации. Следовательно, выходной крутящий момент и мощность приводного цилиндра могут быть эффективно уменьшены, и может быть успешно достигнута вышеуказанная цель - использование приводного цилиндра в качестве приводного устройства для приведения в движение кристаллизатора таким образом, чтобы устройство могло колебаться, при уменьшенной потребляемой мощности, с требуемыми частотами, формами и амплитудами колебаний. Обычно частота колебаний кристаллизатора изменяется в соответствии со скоростью вытягивания заготовки. В этом случае жесткость пружин регулируется в соответствии с требуемой скоростью вытягивания, во время начального этапа работы, когда скорость вытягивания увеличивается от нуля до заранее установленной скорости вытягивания, может требоваться относительно большая мощность на выходе приводного устройства. Однако длительность этого этапа относительно невелика, и обычный приводной цилиндр может мгновенно обеспечить на выходе более высокую мощность по сравнению со своей номинальной мощностью, чтобы соответствовать этому рабочему условию.
Когда набор пружин, имеющих одинаковую длину и жесткость, расположен симметрично относительно центра тяжести кристаллизатора и качающегося стола, жесткость набора пружин пропорциональна количеству пружин. В тех случаях, когда частота колебаний кристаллизатора значительно изменяется в соответствии с изменяющимися рабочими условиями (например, разные участки заготовки и разные типы стали), количество пружин может изменяться таким образом, чтобы жесткость набора пружин могла соответствовать требуемой частоте колебаний. Такое изменение количества пружин, физически поддерживающих качающийся стол, может быть обеспечено подниманием одних пружин при одновременном опускании других пружин. Гидравлические цилиндры расположены под пружинами, так чтобы жесткость пружин можно было удобно регулировать с помощью управляющего устройства.
Жесткость наборов пружин обратно пропорциональна их длине. Каждый набор пружин разделен на несколько сегментов, например n сегментов (т.е. n частей одинаковых пружин, установленных друг на друга, образуют один набор пружин), между которыми находятся разделяющие устройства. После того как кристаллизатор и качающийся стол сжимают пружины до сбалансированного положения, и кристаллизатор приходит в равновесное состояние, пневматические зажимы используются для закрепления сегментов под m-ым сегментом (верхний сегмент определяется как 1-й сегмент) в требуемом положении. В результате жесткость набора пружин будет в n/m раз больше по сравнению с первоначальной.
Краткое описание чертежей
Настоящее изобретение схематично иллюстрируется на фиг.1-4.
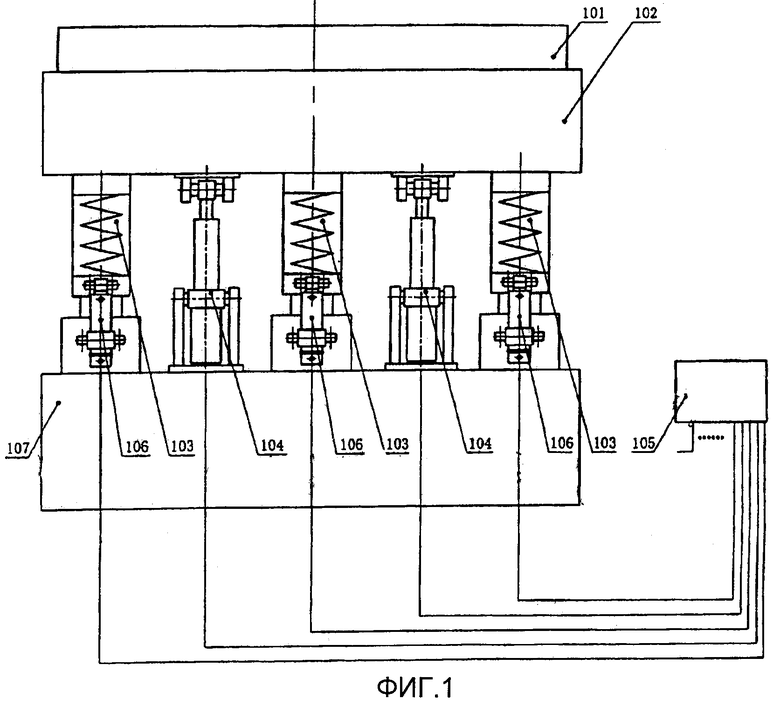
Фиг.1 изображает схему устройства качания кристаллизатора с рядом регулируемых пружин в соответствии с настоящим изобретением.
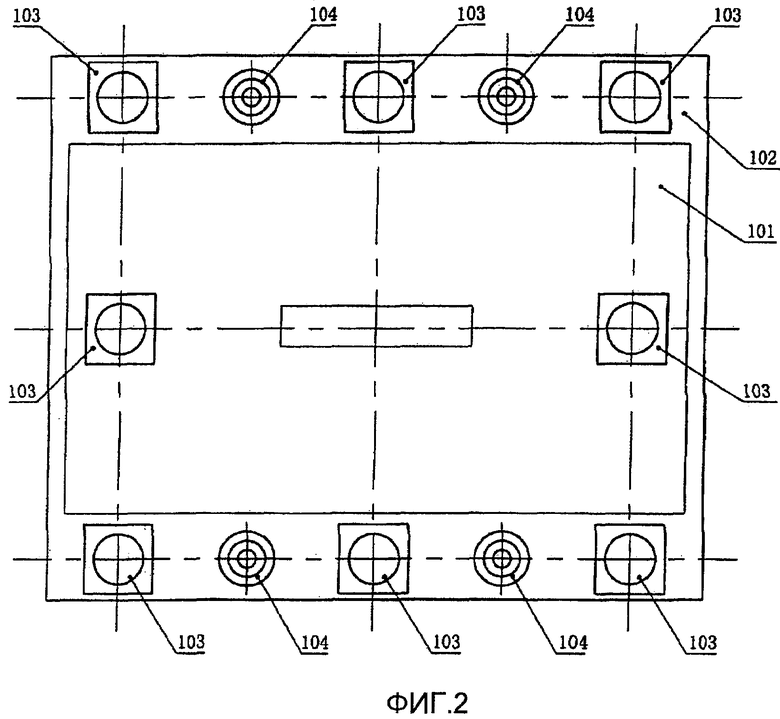
Фиг.2 изображает вид сверху устройства качания по фиг.1.
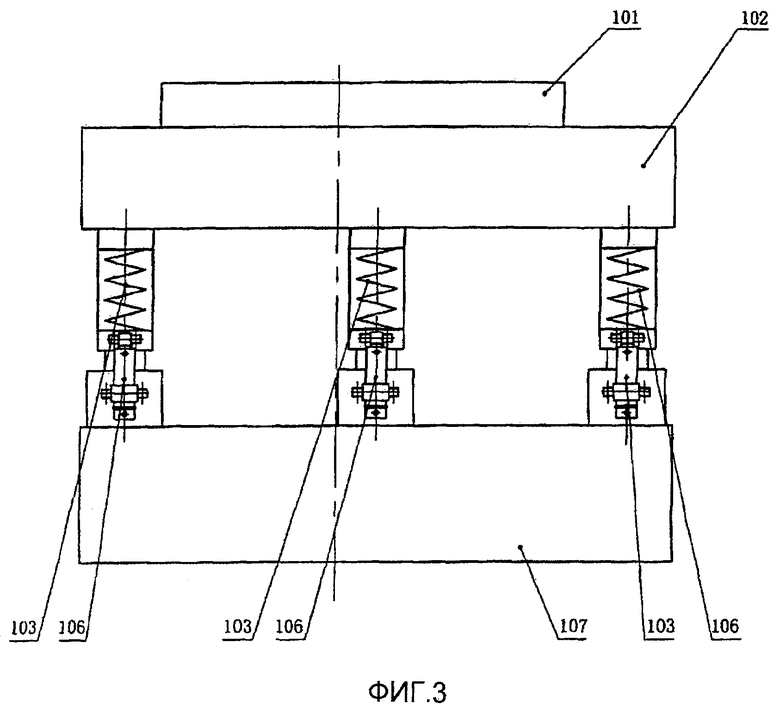
Фиг.3 изображает вид слева устройства качания по фиг.1.
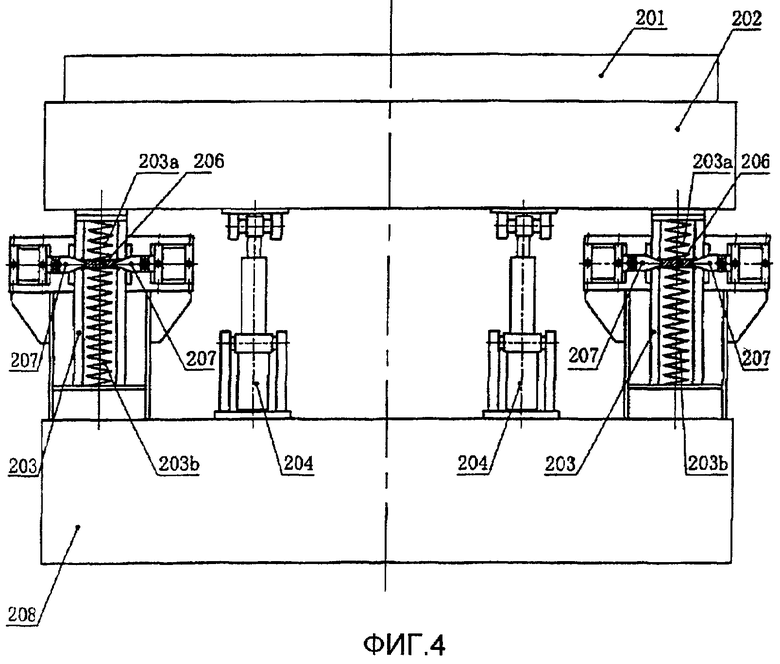
Фиг.4 изображает схему устройства качания кристаллизатора с регулируемой длиной пружин в соответствии с настоящим изобретением.
Первый вариант осуществления настоящего изобретения показан на фиг.1-3. Кристаллизатор 101 располагается на качающемся столе 102. Четыре приводных цилиндра 104 расположены симметрично относительно центра тяжести кристаллизатора. Качающийся стол 102 опирается на восемь наборов 103 пружин. Эти наборы 103 пружин имеют одинаковую длину и одинаковую жесткость и расположены симметрично относительно центра тяжести кристаллизатора 101 и качающегося стола 102. Сжимаясь под действием веса кристаллизатора 101 и качающегося стола 102, восемь наборов 103 пружин смещаются вниз на одинаковое расстояние δ, обеспечивая, таким образом, равновесие сил между силой упругости и силой тяжести. Гидравлические цилиндры 106, которые установлены на основании 107, расположены под наборами 103 пружин. Эти гидравлические цилиндры используются для изменения высоты наборов пружин для увеличения или уменьшения количества пружин, которые физически поддерживают вибрационный стол. Уменьшение количества наборов 103 пружин, которые физически поддерживают вибрационный стол 102, будет соответственно уменьшать жесткость наборов пружин. Например, если удалить пару наборов 103 пружин, расположенных симметрично относительно центра тяжести кристаллизатора 101 и качающегося стола 102, жесткость наборов пружин, расположенных слева, уменьшается до величины, равной 3/4 от первоначальной величины, при этом смещение в результате сжатия пружин, соответственно, увеличится до 4/3δ. С этой целью управляющее устройство 105 управляет соответствующими гидравлическими цилиндрами 106 таким образом, чтобы эти два набора 103 пружин сдвинулись вверх на расстояние δ+s (s - шаг кристаллизатора), а оставшиеся три пары наборов пружин сдвинутся вверх на расстояние 1/3δ. Аналогичным образом две или три пары наборов 103 пружин, расположенных симметрично относительно центра тяжести кристаллизатора 101 и качающегося стола 102, регулируются таким образом, чтобы жесткость наборов пружин, расположенных слева, могла быть уменьшена до 1/2 или 1/4 ее первоначального значения. Управляющее устройство 105 обеспечивает сигналы с регулируемыми в оперативном режиме частотами, формами и амплитудами для управления работой приводных цилиндров 104, которые заставляют кристаллизатор 101 колебаться, а также для управления работой гидравлических цилиндров 106, для того чтобы соответствующим образом регулировать количество наборов пружин 103.
Второй вариант осуществления настоящего изобретения показан на фиг.4. Кристаллизатор 201 расположен на качающемся столе 202. Четыре приводных цилиндра 204 расположены симметрично относительно центра тяжести кристаллизатора. Качающийся стол 202 поддерживается с помощью четырех одинаковых наборов пружин 203. Эти наборы пружины 203 опираются на основание 208, и каждый включает две расположенные друг над другом пружины, то есть верхнюю пружину 203а и нижнюю пружину 203b. Эффективная длина пружины 203а равна 1/3 эффективной длины пружины 203b, и между ними расположено разделительное устройство 206. Когда кристаллизатор 201 и качающийся стол 202 сжимают набор 203 пружин, сдвигая их вниз на расстояние δ, образуя, таким образом, равновесное состояние, пневматические зажимы 207 будут приводиться в действие для закрепления разделительных устройств 206 в требуемом положении. Следовательно, только верхние пружины 203а в наборах 203 пружин используются для выполнения этой работы, что означает, что жесткость наборов пружин увеличивается в 4 раза. Аналогичным образом, каждый набор 203 пружин может быть разделен на несколько сегментов, между которыми соответствующим образом располагаются разделительные устройства 206, и пневматические зажимы 207 могут быть установлены в равновесном положении каждого разделительного устройства 206, соответственно. Таким образом, жесткость наборов 203 пружин может регулироваться в широком диапазоне. Управляющее устройство 205 обеспечивает сигналы с регулируемыми в оперативном режиме частотами, формами и амплитудами для управления работой приводных цилиндров 204, которые заставляют колебаться кристаллизатор 201, а также для управления работой пневматических зажимов 207 таким образом, чтобы можно было соответственно регулировать длину наборов 203 пружин.
Изобретение относится к области литейного производства. Устройство содержит качающийся стол, поддерживающий кристаллизатор, приводные устройства, наборы пружин, поддерживающие качающийся стол, основание, поддерживающее приводные устройства и наборы пружины, и управляющее устройство. Приводными устройствами устройства качания являются приводные цилиндры. Достигается снижение выходного крутящего момента и мощности приводных элементов при обеспечении качания кристаллизатора и качающегося стола с требуемыми частотами, формами и амплитудами колебаний. 3 з.п. ф-лы, 4 ил.
1. Устройство качания кристаллизатора установки непрерывной разливки, содержащее качающийся стол, поддерживающий кристаллизатор, приводные устройства, наборы пружин, поддерживающие качающийся стол, основание, поддерживающее приводные устройства и наборы пружин, и управляющее устройство, в котором приводными устройствами устройства качания являются приводные цилиндры.
2. Устройство по п.1, отличающееся тем, что оно дополнительно содержит гидравлические цилиндры, которые расположены под наборами пружин и приспособлены для регулирования количества наборов пружин, поддерживающих качающийся стол.
3. Устройство по п.1, отличающееся тем, что оно дополнительно содержит пневматические зажимы, которые расположены рядом с наборами пружин и приспособлены для регулирования длины наборов пружин, поддерживающих качающийся стол.
4. Устройство по любому из пп.1-3, отличающееся тем, что управляющее устройство выполнено с возможностью выдачи сигналов с регулируемыми в оперативном режиме частотами, формами и амплитудами для управления работой приводных цилиндров, обеспечивающих синусоидальные или несинусоидальные колебания кристаллизатора, и с возможностью управления работой соответствующих средств, предназначенных для регулирования количества или длины наборов пружин.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОЙ КАЧКИ СУДНА | 2001 |
|
RU2184675C1 |
| МЕХАНИЗМ КАЧАНИЯ КРИСТАЛЛИЗАТОРА | 1999 |
|
RU2160650C1 |
| СПОСОБ КАЧАНИЯ КРИСТАЛЛИЗАТОРА ПРИ НЕПРЕРЫВНОЙ РАЗЛИВКЕ МЕТАЛЛА | 2000 |
|
RU2187409C2 |
| СПОСОБ РАСКАТКИ ГОРЯЧЕЙ ШИРОКОЙ ПОЛОСЫ ИЗ ТОНКИХ СЛЯБОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2108878C1 |

