Настоящее изобретение относится к способу и устройству для ослабления на летательном аппарате воздействий по меньшей мере одной вертикальной турбулентности, встреченной этим летательным аппаратом в ходе полета.
Известно, что в ходе полета резкие турбулентности, связанные с вертикальными порывами ветра, могут вызывать на уровне летательного аппарата:
значительные колебания коэффициента вертикальной составляющей нагрузки, могущие послужить причиной травм пассажиров летательного аппарата;
- значительное отклонение абсолютной высоты летательного аппарата, в силу этого повышение риска столкновения с другим летательным аппаратом; и
- импульсы подъемной силы на крыле, которые подвергают испытанию предельные нагрузки последнего.
Эти резкие турбулентности могут появляться в ясном небе и остаются неподдающимися предвидению. Зачастую, эти явления, которые ограничены определенным участком, удивляют как экипаж летательного аппарата, так и бортовые системы пилотирования, которые не имеют времени для выполнения надлежащих маневров, чтобы ослабить их воздействия, которые оказываются на уровне летательного аппарата.
Следует отметить, что для транспортного самолета появление отрицательных коэффициентов вертикальной составляющей нагрузки является очень опасным для пассажиров, которые не плотно пристегнуты. Они, действительно, могут быть подброшены к потолку и рискуют получить серьезные травмы.
Вышеупомянутые проблемы обостряются разнообразием возможных профилей вертикальных турбулентностей.
Цель настоящего изобретения состоит в том, чтобы исправить эти недостатки. Оно относится к способу, дающему возможность ослаблять, особенно эффективным образом, на летательном аппарате, в частности транспортном самолете, воздействия по меньшей мере одной вертикальной турбулентности, встреченной летательным аппаратом в ходе полета.
Для этой цели согласно изобретению упомянутый способ примечателен тем, что следующая серия последовательных этапов выполняется автоматическим и итеративным образом в ходе полета:
a) вертикальная составляющая ветра, существующего снаружи летательного аппарата, определяется в текущем положении упомянутого летательного аппарата;
b) с помощью этой вертикальной составляющей ветра уровень опасности, относящийся к вертикальной турбулентности, существующей снаружи летательного аппарата, определяется в упомянутом текущем положении;
c) с помощью упомянутой вертикальной составляющей ветра по меньшей мере одна команда управления рассчитывается для по меньшей мере одного управляемого подвижного элемента, способного воздействовать на подъемную силу летательного аппарата, упомянутая команда управления является такой, что она дает возможность минимизировать амплитуду коэффициентов нагрузки, вызванных на летательном аппарате вертикальной турбулентностью; и
d) выполняется проверка, чтобы удостовериться, реализованы ли условия активации, зависящие по меньшей мере от упомянутого уровня опасности; и
e) если условия активации реализованы, упомянутая команда управления передается на по меньшей мере один исполнительный механизм упомянутого управляемого подвижного элемента.
Таким образом, в силу изобретения, определяется уровень опасности вертикальной турбулентности с тем, чтобы оценить, является ли необходимым обеспечить выполнения для ослабления воздействий вертикальной турбулентности. Когда такие действия необходимы, суммарная подъемная сила летательного аппарата подвергается действию (посредством упомянутого подвижного элемента), тем самым, давая возможность минимизировать амплитуду коэффициента вертикальной составляющей нагрузки в любой точке салона летательного аппарата. Настоящее изобретение, таким образом, дает возможность бороться с неожиданными изменениями коэффициента вертикальной составляющей нагрузки, которые вызваны резкими вертикальными турбулентностями вышеупомянутого типа.
Предпочтительным образом для определения вертикальной составляющей ветра:
а) фактические значения множества параметров летательного аппарата измеряются в упомянутом текущем положении; и
б) упомянутая вертикальная составляющая ветра рассчитывается, учитывая упомянутые измеренные фактические значения.
В этом случае, преимущественно, для самолета:
- на этапе а), измеряются
с помощью инерционной платформы вертикальная скорость Vz самолета относительно земли, угол φ наклона крыльев самолета относительно горизонта, пространственное положение θ самолета относительно горизонта и его угловая скорость q по тангажу;
с помощью анемометрического датчика скорость Vtas самолета относительно воздушной массы, в которой этот самолет перемещается;
с помощью датчика угла атаки угол α атаки самолета; и
с помощью датчика скольжения угол β скольжения самолета; и
на этапе б вертикальная составляющая Wz ветра рассчитывается с помощью следующего выражения:
Wz=Vz+Vtas·(cosφ·cosθ·cosβ·sin[α+(q·ℓ/Vtas)]
-sinθ·cosβ·cos[α+(q·ℓ/Vtas)]+sinβ·cosθ·sinφ),
в котором ℓ представляет алгебраическое расстояние между датчиком угла атаки и центром тяжести самолета.
Дополнительно, преимущественным образом, уровень опасности определяется как функция отклонения коэффициента вертикальной составляющей нагрузки между коэффициентом вертикальной составляющей при равновесии для летательного аппарата и коэффициентом вертикальной составляющей в результате вертикальной турбулентности.
В этом случае, предпочтительно, упомянутый уровень опасности соответствует
- первому уровню, когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является меньшим чем или равным первому заранее определенному значению;
- второму уровню, когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является большим, чем упомянутое первое заранее определенное значение, и меньшим, чем второе заранее определенное значение; и
- третьему уровню, когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является большим чем или равным второму заранее определенному значению.
В первом варианте осуществления упомянутый уровень опасности вертикальной турбулентности определяется на основе двух линейных комбинаций вертикальной составляющей ветра и ее производной, а во втором варианте осуществления уровень опасности определяется на основе расчета двух вероятностей.
Дополнительно, в конкретном варианте осуществления:
- упомянутая команда управления рассчитывается на основе линейной комбинации вертикальной составляющей ветра и ее производной; и/или
- упомянутые условия активации зависят как от уровня опасности вертикальной турбулентности, так и от отклонения между значением упомянутой команды управления и предопределенным пороговым значением.
В конкретном варианте осуществления для самолета команда управления передается на по меньшей мере один из следующих подвижных элементов самолета: интерцептор и элерон, и определяется (и передается на руль высоты самолета) по меньшей мере одна вспомогательная команда управления, предназначенная для компенсации момента тангажа, вызванного управлением упомянутым подвижным элементом конструкции.
Настоящее изобретение также относится к устройству для ослабления на летательном аппарате воздействий по меньшей мере одной вертикальной турбулентности, встреченной этим летательным аппаратом, например транспортным самолетом, в ходе полета.
Согласно изобретению упомянутое устройство примечательно тем, что оно содержит:
- по меньшей мере один управляемый подвижный элемент, который способен к воздействию на подъемную силу летательного аппарата;
- первое средство для определения вертикальной составляющей ветра, существующего снаружи летательного аппарата, в текущем положении упомянутого летательного аппарата;
- второе средство для автоматического определения с помощью этой вертикальной составляющей ветра, уровня опасности, относящегося к вертикальной турбулентности, существующей снаружи летательного аппарата, в упомянутом текущем положении;
- третье средство для автоматического расчета с помощью упомянутой вертикальной составляющей ветра, по меньшей мере одной команды управления для упомянутого управляемого подвижного элемента, упомянутая команда управления является такой, что она дает возможность минимизировать амплитуду коэффициентов нагрузки, вызванных на летательном аппарате вертикальной турбулентностью; и
- четвертое средство для автоматической проверки, реализованы ли условия активации, зависящие по меньшей мере от упомянутого уровня опасности, и для автоматической передачи упомянутой команды управления на по меньшей мере один исполнительный механизм упомянутого управляемого подвижного элемента, когда реализованы упомянутые условия активации.
Устройство в соответствии с настоящим изобретением, поэтому, дает возможность ослаблять амплитуду коэффициента вертикальной составляющей нагрузки, вызванного вертикальной турбулентностью, и делать это в любой точке летательного аппарата. Оно также дает возможность снижать любые изменения абсолютной высоты.
Более того, это устройство в соответствии с изобретением демонстрирует преимущество способности устанавливаться на любом типе летательного аппарата (военном, гражданском, коммерческом), оборудованном по меньшей мере одним подвижным элементом (интерцептором, элероном, …) произвольного типа, обладающим влиянием на подъемную силу.
В конкретном варианте осуществления, упомянутое первое средство содержит
набор измерительных элементов для автоматического измерения фактических значений множества параметров летательного аппарата в упомянутом текущем положении; и
средство расчета для автоматического расчета упомянутой вертикальной составляющей ветра, учитывая упомянутые измеренные фактические значения.
Предпочтительно, упомянутый набор измерительных элементов содержит по меньшей мере одну инерционную платформу, по меньшей мере один анемометрический датчик и по меньшей мере один датчик угла атаки, а также, возможно, по меньшей мере один датчик скольжения. Использование датчика скольжения дает возможность повышать точность вертикальной составляющей ветра. Обычно вышеприведенные измерительные элементы уже существуют на летательном аппарате, тем самым, в частности, давая возможность снижать себестоимость устройства в соответствии с изобретением.
Для еще большего снижения стоимости упомянутого устройства, преимущественно, упомянутое второе и третье средства, а также упомянутое средство расчета формируют систему автоматического пилотирования летательного аппарата.
Прилагаемые чертежи иллюстрируют способ, которым может быть осуществлено изобретение. На этих чертежах идентичные ссылки обозначают подобные элементы.
Фиг.1 является схематическим представлением устройства в соответствии с изобретением.
Фиг.2 схематически показывает конкретный примерный вариант осуществления устройства в соответствии с изобретением.
Устройство 1 в соответствии с изобретением, и схематически представленное на фиг.1 предназначено для ослабления на летательном аппарате (не представлен), например, транспортном самолете, воздействий по меньшей мере одной вертикальной турбулентности, встреченной этим летательным аппаратом в ходе полета. Известно, что турбулентность соответствует возмущению воздуха, которое накладывается на среднее движение воздуха и которое состоит из неупорядоченных движений, при непрерывной трансформации. Турбулентность встречается внутри или поблизости от облаков (например, в грозовом облаке, где сосуществуют противоположно направленные вертикальные потоки). Также существуют турбулентности в ясном небе, возле земли, либо в большинстве случаев на очень большой абсолютной высоте поблизости от реактивных струй.
В соответствии с изобретением, упомянутое устройство 1 содержит
- по меньшей мере один подвижный элемент 2, который является управляемым и который способен к воздействию на подъемную силу летательного аппарата;
- средство 3, определенное ниже, для определения вертикальной составляющей Wz ветра, который существует снаружи летательного аппарата в текущем положении последнего;
- средство 4 для автоматического определения с помощью вертикальной составляющей Wz ветра, принятой из упомянутого средства 3, уровня опасности, дающего возможность характеризовать вертикальную турбулентность, существующую снаружи летательного аппарата в упомянутом текущем расположении; и
- средство 5 для последовательных:
автоматического расчета с помощью вертикальной составляющей Wz ветра, принятой посредством линии 6 связи, команды управления для упомянутого управляемого подвижного элемента 2. Эта команда управления такова, что дает возможность минимизировать амплитуду коэффициентов нагрузки, которые формируются на летательном аппарате вертикальной турбулентностью, как указано ниже;
автоматической проверки, реализованы ли условия активации (которые зависят по меньшей мере от упомянутого уровня опасности, принятого посредством линии 7 связи из упомянутого средства 4); и
автоматической передачи упомянутой рассчитанной команды управления на стандартный исполнительный механизм 8 упомянутого управляемого подвижного элемента 2, посредством линии 9 связи, когда реализованы упомянутые условия активации и только в этом случае.
Таким образом, устройство 1, в соответствии с изобретением, определяет уровень опасности вертикальной турбулентности с тем, чтобы оценить, является ли необходимым обеспечить выполнение действий для ослабления воздействий вертикальной турбулентности. Когда такие действия необходимы, упомянутое устройство 1 действует (посредством упомянутого подвижного элемента 2) на суммарную подъемную силу летательного аппарата, тем самым давая возможность минимизировать амплитуду коэффициента вертикальной составляющей нагрузки летательного аппарата и делать это в любой точке его кабины (салона). Устройство 1 в соответствии с настоящим изобретением, таким образом, дает возможность бороться, в частности, с изменениями коэффициента вертикальной составляющей нагрузки, вызванными резкой вертикальной турбулентностью и которые обычно особенно внезапны.
В предпочтительном варианте осуществления, упомянутое средство 3, предназначенное для определения вертикальной составляющей Wz ветра, содержит
- измерительный узел 10, определенный ниже, для измерения фактического значения множества параметров летательного аппарата в упомянутом текущем положении; и
- средство 11 расчета, которое присоединено посредством линии 12 связи к упомянутому измерительному узлу 10 и которое сформировано с тем, чтобы рассчитывать упомянутую вертикальную составляющую Wz ветра, учитывая фактические значения, измеренные упомянутым измерительным узлом 10.
Для этой цели упомянутый измерительный узел 10 содержит множество измерительных элементов или чувствительных элементов C1, C2, … Сn, предназначенных для измерения фактических значений упомянутых вышеизложенных параметров летательного аппарата.
Упомянутое средство 11 расчета присоединено посредством линии 13 связи к упомянутому средству 4 и, посредством линии 6 связи - к упомянутому средству 5.
В конкретном варианте осуществления упомянутые средства 4 и 5 и упомянутое средство 11 расчета интегрированы в центральный узел 15, который образует, например, часть стандартной системы автоматического пилотирования летательного аппарата. Так как такая система автоматического пилотирования вообще уже существует на летательном аппарате, этот конкретный вариант осуществления дает возможность снизить стоимость устройства 1 в соответствии с изобретением и упростить его реализацию.
В конкретном варианте осуществления упомянутое средство 5 определяет уровень опасности вертикальной турбулентности как функцию отклонения коэффициента вертикальной составляющей нагрузки между коэффициентом нагрузки, существующим в равновесии на летательном аппарате, и коэффициентом нагрузки, сложившимся в ответ на вертикальную турбулентность.
В этом случае уровень опасности соответствует:
- первому уровню (например названному уровнем 0), когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является меньшим чем или равным первому предопределенному значению, например 0,3 g, где g соответствует значению ускорения, создаваемого силой тяжести над поверхностью земли;
- второму уровню (например, названному уровнем 1), когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является большим, чем упомянутое первое предопределенное значение (например, 0,3 g), и меньшим, чем второе предопределенное значение, например 0,5 g; и
- третьему уровню (например, названному уровнем 2), когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является большим чем или равным второму предопределенному значению , например 0,5 g.
В первом варианте осуществления упомянутое средство 4 определяет упомянутый уровень опасности вертикальной турбулентности на основе двух линейных комбинаций вертикальной составляющей Wz ветра и ее производной. Коэффициенты такой линейной комбинации оптимизированы так, что уровни лучше всего распознаются алгоритмом. Если одна из этих комбинаций превышает первое предопределенное пороговое значение, получается уровень 1, а если другая превышает второе предопределенное значение, получается уровень 2. Уровень 2 имеет приоритет над уровнем 1.
Более того, во втором варианте осуществления упомянутое средство 4 определяет упомянутый уровень опасности на основе расчета двух вероятностей, а именно, с одной стороны, вероятности появления отклонений коэффициента вертикальной составляющей нагрузки (в пределах предопределенной предстоящей продолжительности, например, в пределах одной секунды) более чем первого предопределенного значения, например более чем 0,3 g, а, с другой стороны, вероятности появления отклонений коэффициента вертикальной составляющей нагрузки (в течение этой предопределенной предстоящей продолжительности) более чем второго предопределенного значения, например более чем 0,5 g. Эти две вероятности рассчитываются на основе вертикальной составляющей Wz ветра, принятой из средства 3, угла α атаки летательного аппарата и угловой скорости q по тангажу летательного аппарата. Если вероятность, связанная с отклонениями от 0,3 g, превышает предопределенное пороговое значение, получается уровень 1. Если вероятность, связанная с отклонениями от 0,5 g, превышает другое предопределенное пороговое значение, получается уровень 2. Формулы вероятности заданы на основе обучения нейронных сетей. Уровень 2 имеет приоритет над уровнем 1.
Более того, в конкретном варианте осуществления упомянутое средство 5 рассчитывает упомянутую команду управления для подвижного элемента 2 на основе линейной комбинации вертикальной составляющей Wz ветра и ее производной.
Более того, упомянутые условия активации, учитываемые средством 5, зависят от уровня опасности вертикальной турбулентности, принятого из упомянутого средства 4 посредством линии 7 связи, а также значения упомянутой команды управления, которое сравнивается с пороговым значением. Для системы, которая должна активироваться (то есть, чтобы выполнялись условия активации), в вышеупомянутом примере, уровню опасности необходимо быть по меньшей мере на уровне 1, а команде управления превышать предопределенное пороговое значение. После этого, если команда управления остается меньшей, чем предопределенное значение, в течение предопределенного времени, без появления уровня 2, команда управления отменяется. Команда управления также отменяется, если уровень опасности переходит с уровня 2 на уровень 1, с производной угла атаки, которая отрицательна.
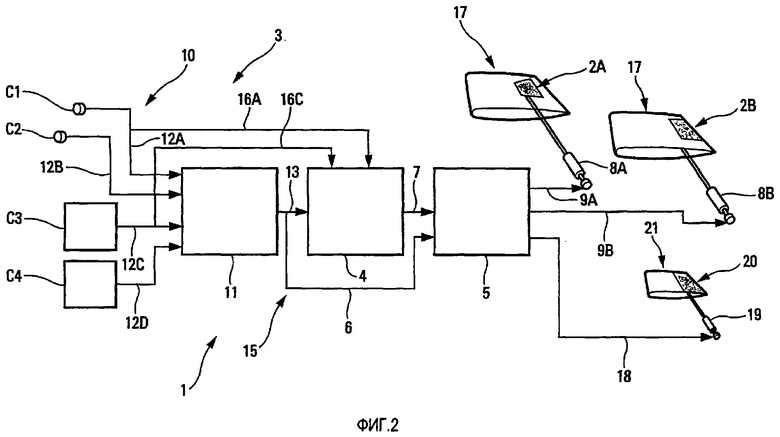
В предпочтительном варианте осуществления, представленном на фиг.2, который применяется к самолету, упомянутый измерительный узел 10 содержит чувствительные элементы С1, С2, С3 и С4, которые присоединены соответственно посредством линий 12А, 12В, 12С и 12D связи к упомянутому средству 11 отсчета:
- стандартный датчик С1 угла атаки для измерения угла α атаки самолета;
- стандартный датчик С2 скольжения для измерения угла β скольжения самолета;
- стандартная инерционная платформа С3 для измерения вертикальной скорости Vz самолета относительно земли, угла φ наклона крыльев самолета относительно горизонта, пространственное положение θ самолета относительно горизонта и его угловой скорости q по тангажу; и
- стандартный анемометрический датчик С4 для измерения скорости Vtas самолета относительно воздушной массы, в которой этот самолет перемещается.
В этом примере средство 11 расчета рассчитывает вертикальную составляющую Wz ветра, с помощью следующего выражения:
Wz=Vz+Vtas·(cosφ·cosθ·cosβ·sin[α+(q·ℓ/Vtas)]
-sinθ·cosβ·cos[α+(q·ℓ/Vtas)]+sinβ·cosθ·sinφ),
в котором ℓ представляет алгебраическое расстояние между датчиком С1 угла атаки и центром тяжести самолета.
Более того, в этом варианте осуществления по фиг.2 датчик С1 угла атаки соединен посредством линии 16А связи со средством 4 для его снабжения углом атаки α, а инерционная платформа С3 соединена посредством линии 16С связи с упомянутым средством 4 для снабжения его угловой скоростью q по тангажу. Этот угол атаки α и эта угловая скорость q по тангажу могут использоваться средством 4 для определения уровня опасности вертикальной турбулентности в соответствии с вышеупомянутым вариантом осуществления.
Более того, в примере по фиг.2 устройство 1 в соответствии с изобретением содержит в качестве подвижного элемента
- по меньшей мере один стандартный интерцептор 2А, который установлен на крыле 17 самолета и который связан со стандартным средством 8А приведения в действие, присоединенным посредством линии 9А связи к упомянутому средству 5; и
- по меньшей мере один стандартный элерон 2В, который также установлен на крыле 17 и который связан со стандартным исполнительным механизмом 8В, присоединенным посредством линии 9В связи к упомянутому средству 5.
Как указано ранее, команды управления для интерцептора или интерцепторов 2А и элерона или элеронов 2В получаются на основе линейной комбинации вертикальной составляющей Wz ветра и ее производной.
Более того, в конкретном варианте осуществления упомянутое средство 5, более того, определяет вспомогательную команду управления и оно передает эту вспомогательную команду управления, посредством линии 18 связи на стандартный исполнительный механизм 19 стандартного руля 20 высоты, который установлен на горизонтальном хвостовом оперении 21 самолета. Эта вспомогательная команда управления предназначена для компенсации момента тангажа, вызванного управлением (в соответствии с изобретением) интерцептора или интерцепторов 2А и элерона или элеронов 2В. Упомянутая команда управления пропорциональна командам управления интерцептора или интерцепторов 2А и элерона или элеронов 2В согласно коэффициенту передачи, рассчитанному на основе истории полета (массы, платформы, скорости и абсолютной высоты самолета). Различные команды подаются в фазе. Подача в фазе состоит в выравнивании времени, требуемого для каждого подвижного элемента (подвижного элемента 2А, 2В; руля 20 высоты) для достижения значения уставки. Это время выбирается таким, как у самого медленного подвижного элемента (подвижного элемента 2А, 2В; руля 20 высоты).
Конечно, команды управления, определенные в соответствии с настоящим изобретением, накладываются на команды, предусмотренные стандартным образом другими пилотажными элементами летательного аппарата, перед передачей на исполнительные механизмы 8А, 8В, 19 подвижных элементов (подвижных элементов 2А, 2В; руля 20 высоты). Таким образом/ устройство 1 в соответствии с изобретением, к тому же в равной степени хорошо применяется к системе ручного управления полетом летательного аппарата, как к системе автоматического управления полетом летательного аппарата.
Устройство 1 в соответствии с настоящим изобретением поэтому дает возможность ослаблять амплитуду коэффициента вертикальной составляющей нагрузки, вызванного вертикальной турбулентностью, и делать это в любой точке летательного аппарата. Оно также дает возможность снижать любые изменения абсолютной высоты.
Более того, это устройство 1 в соответствии с изобретением демонстрирует преимущество способности устанавливаться на любом типе летательного аппарата (военном, гражданском, коммерческом), оборудованного по меньшей мере одним подвижным элементом произвольного типа (интерцептором 2А, элероном 2В, …), обладающим влиянием на подъемную силу летательного аппарата.
В рамках настоящего изобретения, вышеупомянутый принцип расчета вертикальной составляющей Wz ветра может быть дополнен или замещен специальным датчиком или информацией, внешней по отношению к системам летательного аппарата, например, сообщениями сводки погоды, принятыми с земли или другого летательного аппарата.
Изобретение относится к области управления летательными аппаратами. В соответствии со способом для ослабления воздействия вертикальной турбулентности автоматически определяют с использованием вертикальной составляющей ветра вертикальную составляющую ветра, уровень опасности. Используется средство для автоматического вычисления команды управления для управляемого элемента, которая дает возможность минимизировать амплитуду коэффициентов нагрузки, вызванных на летательном аппарате вертикальной турбулентностью. Устройство содержит подвижный элемент, который способен к воздействию на подъемную силу летающего аппарата, средства для определения вертикальной составляющей ветра и уровня опасности, автоматического расчета и передачи команды управления, формирования проверки условия активации. Достигается возможность ослаблять воздействия вертикальной турбулентности. 4 н. и 14 з.п ф-лы, 2 ил.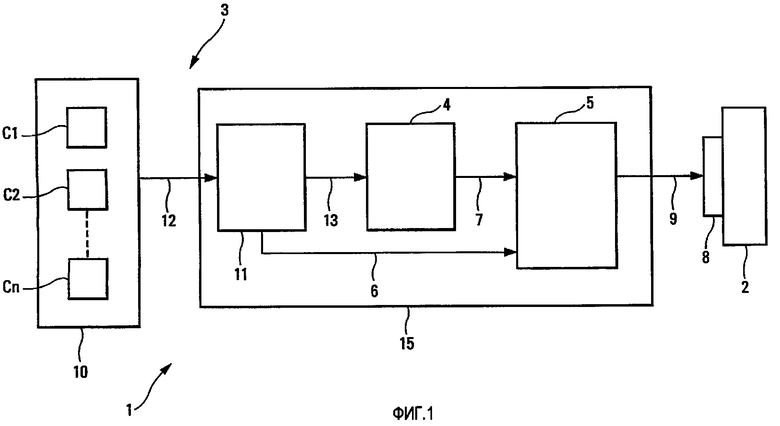
1. Способ для ослабления на летательном аппарате воздействия по меньшей мере одной вертикальной турбулентности, встреченной этим летательным аппаратом в ходе полета, в соответствии с этим способом автоматическим образом в ходе полета выполняется следующая серия последовательных этапов, на которых а) вертикальную составляющую ветра, существующего снаружи летательного аппарата, определяют в текущем положении упомянутого летательного аппарата, с) с помощью упомянутой вертикальной составляющей ветра по меньшей мере одну команду управления рассчитывают для по меньшей мере одного управляемого подвижного элемента (2, 2А, 2В) конструкции, который способен к воздействию на подъемную силу летательного аппарата, упомянутая команда управления является такой, что она дает возможность минимизировать амплитуду коэффициентов нагрузки, вызванных на летательном аппарате вертикальной турбулентностью, и е) упомянутую команду управления передают на по меньшей мере один исполнительный механизм (8, 8А, 8В) упомянутого управляемого подвижного элемента (2, 2А, 2В), в котором, кроме того, в ходе упомянутого полета автоматическим образом выполняют следующие этапы, на которых b) с помощью упомянутой вертикальной составляющей ветра определяют уровень опасности, относящийся к вертикальной турбулентности, существующей снаружи летательного аппарата, в текущем положении, упомянутый уровень опасности вертикальной турбулентности определяется как функция отклонения коэффициента вертикальной составляющей нагрузки между коэффициентом нагрузки в равновесии для летательного аппарата и коэффициентом нагрузки в результате вертикальной турбулентности, и d) выполняют проверку, чтобы удостовериться, реализованы ли условия активации, зависящие по меньшей мере от упомянутого уровня опасности, и на этапе е) упомянутую команду управления передают на упомянутый исполнительный механизм (8, 8А, 8В) упомянутого управляемого подвижного элемента (2, 2А, 2В), когда реализованы упомянутые условия активации.
2. Способ по п.1, в котором для определения вертикальной составляющей ветра а1) измеряют фактические значения множества параметров летательного аппарата в упомянутом текущем положении и а2) рассчитывают упомянутую вертикальную составляющую ветра, учитывая упомянутые измеренные фактические значения.
3. Способ по п.2, в котором для самолета на этапе а1) измеряют с помощью инерционной платформы (С3) вертикальную скорость Vz самолета относительно земли, угол φ наклона крыльев самолета относительно горизонта, пространственное положение θ самолета относительно горизонта и его угловую скорость q по тангажу, с помощью анемометрического датчика (С4) скорость Vtas самолета относительно воздушной массы, в которой этот самолет перемещается, с помощью датчика (С1) угла атаки угол α атаки самолета и с помощью датчика (С2) скольжения угол β скольжения самолета, и на этапе а2) рассчитывают вертикальную составляющую Wz ветра с помощью следующего выражения:
Wz=Vz+Vtas·(cosφ·cosθ·cosβ·sin[α+(q·ℓ/Vtas)]
-sinθ·cosβ·cos[α+(q·ℓ/Vtas)]+sinβ·cosθ·sinφ),
в котором ℓ представляет алгебраическое расстояние между датчиком С1 угла атаки и центром тяжести самолета.
4. Способ по п.1, в котором упомянутый уровень опасности соответствует первому уровню, когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является меньшим, чем или равным первому заранее определенному значению, второму уровню, когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является большим, чем упомянутое первое заранее определенное значение, и меньшим, чем второе заранее определенное значение, и третьему уровню, когда упомянутое отклонение коэффициента вертикальной составляющей нагрузки является большим, чем или равным второму заранее определенному значению.
5. Способ по п.1, в котором на этапе b) определяют уровень опасности вертикальной турбулентности на основе двух линейных комбинаций вертикальной составляющей ветра и ее производной.
6. Способ по п.1, в котором на этапе b) уровень опасности вертикальной турбулентности определяют на основе расчета двух вероятностей.
7. Способ по п.1, в котором на этапе с) упомянутую команду управления рассчитывают на основе линейной комбинации вертикальной составляющей ветра и ее производной.
8. Способ по п.1, в котором на этапе d) упомянутые условия активации зависят от уровня опасности вертикальной турбулентности и от отклонения между значением упомянутой команды управления и заранее определенным пороговым значением.
9. Способ по п.1, в котором для самолета на этапе d) команда управления передается на по меньшей мере один из следующих подвижных элементов самолета: интерцептор (2А) и элерон (2В), и по меньшей мере одну вспомогательную команду управления, предназначенную для компенсации момента тангажа, сформированного управлением упомянутым подвижным элементом (2А, 2В), определяют и передают на руль (20) высоты самолета.
10. Устройство для ослабления на летательном аппарате воздействий по меньшей мере одной вертикальной турбулентности, встреченной этим летательным аппаратом в ходе полета, упомянутое устройство (1) содержит по меньшей мере один управляемый подвижный элемент (2, 2А, 2В), который способен к воздействию на подъемную силу летательного аппарата, первое средство (3) для определения вертикальной составляющей ветра, существующего снаружи летательного аппарата, в текущем положении упомянутого летательного аппарата, третье средство (5) для автоматического расчета, с помощью упомянутой вертикальной составляющей ветра, по меньшей мере одной команды управления для упомянутого управляемого подвижного элемента (2, 2А, 2В), упомянутая команда управления является такой, что она дает возможность минимизировать амплитуду коэффициентов нагрузки, вызванных на летательном аппарате вертикальной турбулентностью и четвертое средство (5) для автоматической передачи упомянутой команды управления на по меньшей мере один исполнительный механизм (8, 8А, 8В) упомянутого управляемого подвижного элемента (2, 2А, 2В), при этом упомянутое устройство (1), кроме того, содержит второе средство (4) для автоматического определения с помощью упомянутой вертикальной составляющей ветра уровня опасности, относящегося к вертикальной турбулентности, существующей снаружи летательного аппарата, в текущем положении, упомянутое второе средство (4) определяет упомянутый уровень опасности вертикальной турбулентности как функцию отклонения коэффициента вертикальной составляющей нагрузки между коэффициентом нагрузки в равновесии для летательного аппарата и коэффициентом нагрузки, являющимся следствием вертикальной турбулентности, и упомянутое четвертое средство (5) сформировано для автоматической проверки, реализованы ли условия активации, зависящие по меньшей мере от упомянутого уровня опасности, и для автоматической передачи упомянутой команды управления на упомянутый исполнительный механизм (8, 8А, 8В) упомянутого управляемого подвижного элемента (2, 2А, 2В), когда упомянутые условия активации реализованы.
11. Устройство по п.10, в котором упомянутое первое средство (3) содержит набор (10) измерительных элементов (С1, С2, С3, С4, Сn) для автоматического измерения фактических значений множества параметров летательного аппарата в упомянутом текущем положении и средство (11) расчета для автоматического расчета упомянутой вертикальной составляющей ветра, учитывая упомянутые измеренные фактические значения.
12. Устройство по п.11, в котором упомянутый набор (10) измерительных элементов содержит по меньшей мере одну инерционную платформу (С3), по меньшей мере один анемометрический датчик (С4) и по меньшей мере один датчик (С1) угла атаки.
13. Устройство по п.12, в котором упомянутый набор (10) измерительных элементов, кроме того, содержит по меньшей мере один датчик скольжения (С2).
14. Устройство по п.10, в котором упомянутое второе и третье средство (4, 5), а также упомянутое средство (11) расчета формируют часть системы (15) автоматического пилотирования летательного аппарата.
15. Устройство по п.10, в котором упомянутый подвижный элемент конструкции является интерцептором (2А).
16. Устройство по п.10, в котором упомянутый подвижный элемент конструкции является элероном (2В).
17. Летательный аппарат, который содержит устройство (1), допускающее реализацию способа по п.1.
18. Летательный аппарат, который содержит устройство (1), такое как по п.10.
| US 4227662 А, 14.10.1980 | |||
| JP 2000062698 A, 29.02.2000 | |||
| АЛЕКСАНДРОВ А.Д., ФЕДОРОВ С.М | |||
| Системы цифрового управления самолетом | |||
| - М.: Машиностроение, 1983, с.106, 107 | |||
| ПАВЛОВ В.А., ПОНЫРКО С.А., ХОВАНСКИЙ Ю.М | |||
| Стабилизация летательных аппаратов и автопилоты | |||
| - М.: Высшая школа, 1964, с.43-45 | |||
| US 5601256 А, 11.02.1997. |

