Изобретение относится к авиационной технике, в частности к блокам ориентации.
Известен блок ориентации курсовой системы [1], содержащий гирокомпас, индукционный магнитный датчик, аналого-цифровой преобразователь, вычислительную машину.
Недостатком данного устройства является отсутствие в нем тест-контроля индукционного магнитного датчика.
Известен блок ориентации [2], содержащий блок датчиков первичной информации, состоящий из трех акселерометров, трех датчиков угловой скорости, трехкомпонентный магнитометр, преобразователь на базе аналого-цифрового преобразователя (АЦП), вычислительную машину.
Недостатком данного устройства является отсутствие в нем тест-контроля трехкомпонентного магнитометра, что снижает надежность работы.
Заявленное изобретение направлено на повышение надежности устройства.
Поставленная задача достигается тем, что в устройство для включения блока ориентации интегрированной системы резервных приборов в пилотажно-навигационный комплекс, содержащее блок инерциальных датчиков первичной информации и трехкомпонентный магнитометр, подключенные через аналого-цифровой преобразователь к шине внешнего интерфейса вычислительной машины, согласно изобретению дополнительно введены источник опорного напряжения, аналоговый инвертор, сигнализатор, подключенный к выходу вычислительной машины, и три канала управления, каждый из которых содержит устройство защиты и аналоговый коммутатор, цифровой вход которого подключен к шине внутреннего интерфейса вычислительной машины, первый аналоговый вход подключен к выходу аналогового инвертора, вход которого подключен к источнику опорного напряжения и второму аналоговому входу аналогового коммутатора, выход которого подключен через устройство защиты ко входу трехкомпонентного магнитометра.
К существенным отличиям предложенного устройства относится введение в него тест-контроля путем подачи на вход трехкомпонентного магнитометра постоянного напряжения от источника опорного напряжения. При этом магнитометр изменяет свой выходной сигнал, по величине которого можно судить о его работоспособности, что повышает надежность устройства.
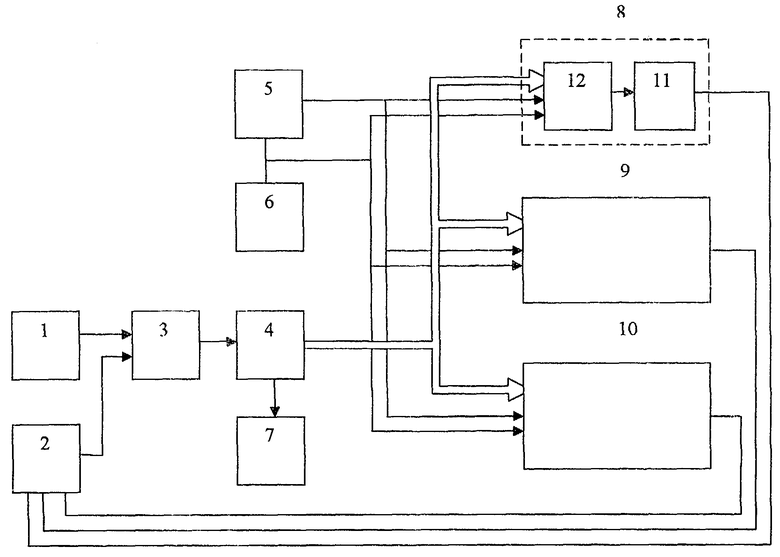
Предлагаемое изобретение иллюстрируется чертежом, на котором представлена структурная схема устройства, содержащего блок 1 инерциальных датчиков первичной информации, трехкомпонентный магнитометр 2, АЦП 3, вычислительную машину 4, источник 5 опорного напряжения, аналоговый инвертор 6, сигнализатор 7, три канала 8-10 управления, устройство 11 защиты, аналоговый коммутатор 12.
Блок 1 инерциальных датчиков первичной информации и трехкомпонентный магнитометр 2 подключены через АЦП 3 к шине внешнего интерфейса вычислительной машины 4, к шине внутреннего интерфейса которой подключен в каждом канале 8-10 цифровой вход аналогового коммутатора 12, первый аналоговый вход которого подключен к выходу аналогового инвертора 6, вход которого подключен к источнику 5 опорного напряжения и второму аналоговому входу аналогового коммутатора 12, выход которого подключен через устройство 11 защиты ко входу трехкомпонентного магнитометра 2, сигнализатор 7 подключен к выходу вычислительной машины 4.
Устройство работает следующим образом.
Блок 1 инерциальных датчиков первичной информации и трехкомпонентный магнитометр 2 выдают текущие значения ускорения, угловой скорости, величины магнитного поля Земли в виде аналоговых электрических сигналов, которые с помощью АЦП 3 преобразуются в цифровой код, поступающий на вычислительную машину 4, где производится вычисление необходимых значений навигационных параметров. По шине внутреннего интерфейса вычислительной машины 4 в каждом из каналов 8-10 на цифровой вход аналогового коммутатора 12 приходит цифровой код, по которому производится подключение положительного или отрицательного опорного напряжения через устройство 11 защиты на вход трехкомпонентного магнитометра 2, который начинает выдавать тестовый аналоговый сигнал через АЦП 3 на вычислительную машину 4. Если величина этого сигнала соответствует ожидаемому значению, то это свидетельствует о штатной работе устройства и формируется сигнал исправности, который выдается на сигнализатор 7, если не соответствует, то исправность снимается и сигнализатор 7 сигнализирует об отказе.
Источник 5 опорного напряжения формирует напряжение одной полярности, и, чтобы получить напряжение другой полярности, предусмотрен аналоговый инвертор 6. В связи с тем что линия связи между трехкомпонентным магнитометром 2 и АЦП 3 имеет значительную протяженность, для снижения уровня помех, наводимых на нее, предусмотрено устройство 5 защиты.
Предложенное устройство используется в блоке ориентации интегрированной системы резервных приборов.
Источники информации
1. Патент США №4347730, кл. 73/1Е, 1982 г.
2. Юбилейная XV Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Санкт-Петербург, 2008 г., стр.263. Компенсация магнитной девиации интегрированной системы резервных приборов. В.М.Самойлов, Д.В.Свяжин (прототип).
Изобретение относится к области приборостроения, в частности к приборам ориентации летательных аппаратов (ЛА). Технический результат - повышение надежности. Для достижения данного результата устройство содержит блок инерциальных датчиков первичной информации, трехкомпонентный магнитометр, аналого-цифровой преобразователь (АЦП), вычислительную машину, источник опорного напряжения, аналоговый инвертор, сигнализатор, три канала управления, устройство защиты и аналоговый коммутатор. В устройство введен тест-контроль магнитометра путем подачи на его вход постоянного напряжения от источника опорного напряжения. При этом магнитометр изменяет свой выходной сигнал, по величине которого судят о работоспособности устройства. 1 ил.
Устройство для включения блока ориентации интегрированной системы резервных приборов в пилотажно-навигационной комплекс, содержащее блок инерциальных датчиков первичной информации и трехкомпонентный магнитометр, подключенные через аналого-цифровой преобразователь к шине внешнего интерфейса вычислительной машины, отличающееся тем, что в него дополнительно введены источник опорного напряжения, аналоговый инвертор, сигнализатор, подключенный к выходу вычислительной машины, и три канала управления, каждый из которых содержит устройство защиты и аналоговый коммутатор, цифровой вход которого подключен к шине внутреннего интерфейса вычислительной машины, первый аналоговый вход подключен к выходу аналогового инвертора, вход которого подключен к источнику опорного напряжения и второму аналоговому входу аналогового коммутатора, выход которого подключен через устройство защиты ко входу трехкомпонентного магнитометра.
| САМОЙЛОВ В.М., СВЯЖИН Д.В | |||
| Компенсация магнитной девиации интегрированной системы резервных приборов, Юбилейная XV Санкт-Петербургская международная конференция по интегрированным навигационным системам | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 4347730 А, 07.09.1982 | |||
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ С ПОМОЩЬЮ РЕАКТИВНЫХ МАХОВИКОВ | 2004 |
|
RU2281233C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ С ПОМОЩЬЮ РЕАКТИВНЫХ МАХОВИКОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2281232C2 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |

