Изобретение относится к авиационной технике, в частности к блокам ориентации.
Известен блок ориентации [1], содержащий блок датчиков первичной информации, состоящий из трех акселерометров, трех датчиков угловой скорости, трехкомпонентный магнитометр, преобразователь на базе аналого-цифрового преобразователя (АЦП), вычислительную машину (ВМ).
Недостатком данного устройства является отсутствие в нем контроля датчиков угловой скорости.
Известно устройство для включения блока ориентации интегрированной системы резервных приборов в пилотажно-навигационный комплекс [2], содержащее сигнализатор, блок инерциальных датчиков первичной информации, состоящий из трех датчиков угловой скорости, трех акселерометров, подключенный через АЦП к шине внешнего интерфейса ВМ, трехкомпонентный магнитометр с узлом тест-контроля, содержащим источник опорного напряжения, аналоговый инвертор, три канала управления, в состав каждого из которых входят устройство защиты, аналоговый коммутатор, подключенные к АЦП и шине внутреннего интерфейса ВМ.
Недостатком данного устройства является отсутствие в нем контроля датчиков угловой скорости, что снижает надежность работы.
Заявленное изобретение направлено на повышение надежности устройства.
Поставленная задача достигается тем, что в устройство для контроля блока ориентации интегрированной системы резервных приборов, содержащее сигнализатор, подключенный к ВМ, блок инерциальных датчиков первичной информации, состоящий из трех датчиков угловой скорости, трех акселерометров, подключенных через АЦП к шине внешнего интерфейса ВМ, трехкомпонентный магнитометр с узлом тест-контроля, подключенный к АЦП и шине внутреннего интерфейса ВМ, согласно изобретению введены дополнительный АЦП, мультиплексор, три канала преобразования, каждый из которых содержит последовательно соединенные масштабирующий усилитель, выпрямитель, фильтр, выход которого подключен через мультиплексор ко входу дополнительного АЦП, выход которого подключен к шине внутреннего интерфейса ВМ, а вход масштабирующего усилителя подключен к тестовому выходу датчиков угловой скорости.
К существенным отличиям предложенного устройства относится введение в него контроля исправности датчиков угловой скорости путем преобразования их переменного тестового напряжения в постоянное, преобразования с помощью АЦП в цифровой код и передачи его в ВМ для анализа исправности по определенному критерию, а это позволяет судить о работоспособности датчиков угловой скорости, что повышает надежность устройства.
Предлагаемое изобретение иллюстрируется чертежом, на котором представлена структурная схема устройства, содержащего сигнализатор 1, ВМ 2, блок 3 инерциальных датчиков первичной информации, датчики 7 угловой скорости, акселерометры 5, трехкомпонентный магнитометр 6 с узлом тест-контроля, АЦП 7, дополнительный АЦП 8, мультиплексор 9, три канала 10-12 преобразования, масштабирующий усилитель 13, выпрямитель 14, фильтр 15.
К шине внешнего интерфейса ВМ 2 с подсоединенным сигнализатором 1 подключены через АЦП 7 датчики 4 угловой скорости, акселерометры 5 блока 3 инерциальных датчиков первичной информации и трехкомпонентный магнитометр 6 с узлом тест-контроля, подключенным к шине внутреннего интерфейса ВМ 2. Тестовые выходы датчиков 4 угловой скорости через последовательно соединенные масштабирующий усилитель 13, выпрямитель 14, фильтр 15 каждого из каналов 10-12 преобразования подключены через соединенные последовательно мультиплексор 9 и дополнительный АЦП 8 к шине внутреннего интерфейса ВМ 2.
Устройство работает следующим образом.
Датчики 4 угловой скорости, акселерометры 5 блока 3 инерциальных датчиков первичной информации и трехкомпонентный магнитометр 6 выдают текущие значения угловой скорости, ускорения, величины магнитного поля Земли в виде аналоговых электрических сигналов, которые с помощью АЦП 7 преобразуются в цифровой код, поступающий на шину внешнего интерфейса ВМ 2, где производится вычисление необходимых значений навигационных параметров. Узел тест-контроля, входящий в состав трехкомпонентного магнитометра 6, осуществляет его контроль и формирует сигнал исправности в случае штатной работы. С выходов датчиков 4 угловой скорости на входы масштабирующих усилителей 13 каждого из каналов 10-12 преобразования поступает переменное напряжение, которое масштабируется, выпрямляется выпрямителем 14, фильтруется фильтром 15 и становится постоянным напряжением. Это напряжение поступает на мультиплексор 9, который поочередно подключает выходы каналов 10-12 преобразования ко входу дополнительного АЦП 8, который преобразует его в цифровой код, поступающий на шину внутреннего интерфейса ВМ 2. Если величина сигнала с выходов каналов 10-12 преобразования соответствует ожидаемому значению, то это свидетельствует о штатной работе датчиков 4 угловой скорости, и ВМ 2 формирует сигнал исправности, который выдается на сигнализатор 1. Если не соответствует, то исправность снимается, и сигнализатор 1 сигнализирует об отказе.
Предложенное устройство используется в блоке ориентации интегрированной системы резервных приборов.
Источники информации
1. Юбилейная XV Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Санкт-Петербург, 2008 г. стр.263. Компенсация магнитной девиации интегрированной системы резервных приборов. В.М.Самойлов, Д.В.Свяжин.
2. Патент РФ №2377502, МПК G01C 21/00, 2008 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2008 |
|
RU2377502C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2013 |
|
RU2548056C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2008 |
|
RU2377501C1 |
| Интегрированная система резервных приборов | 2017 |
|
RU2690029C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2014 |
|
RU2570227C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2505786C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| РЕЗЕРВНАЯ СИСТЕМА ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И СПОСОБ ВЫСТАВКИ ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ | 2014 |
|
RU2551710C1 |
Изобретение относится к области приборостроения и может найти применение в системах ориентации подвижных объектов. Технический результат - повышение надежности. Для достижения данного результата устройство содержит сигнализатор, вычислительную машину (ВМ), блок инерциальных датчиков первичной информации, датчики угловой скорости, акселерометры, трехкомпонентный магнитометр с узлом тест-контроля, аналого-цифровой преобразователь (АЦП), дополнительный АЦП, мультиплексор, три канала преобразования, масштабирующий усилитель, выпрямитель и фильтр. 1 ил.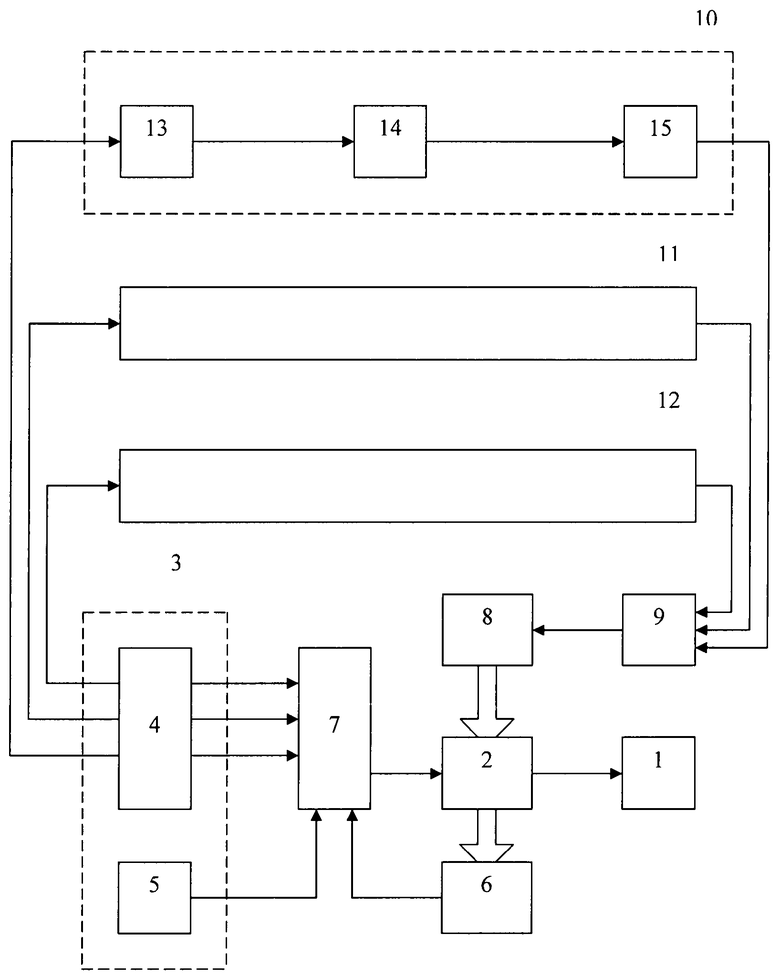
Устройство для контроля блока ориентации интегрированной системы резервных приборов, содержащее сигнализатор, подключенный к вычислительной машине, блок инерциальных датчиков первичной информации, состоящий из трех датчиков угловой скорости, трех акселерометров, подключенный через аналого-цифровой преобразователь к шине внешнего интерфейса вычислительной машины, трехкомпонентный магнитометр с узлом тест-контроля, подключенный к аналого-цифровому преобразователю и шине внутреннего интерфейса вычислительной машины, отличающееся тем, что в него введены дополнительный аналого-цифровой преобразователь, мультиплексор, три канала преобразования, каждый из которых содержит последовательно соединенные масштабирующий усилитель, выпрямитель, фильтр, выход которого подключен через мультиплексор ко входу дополнительного аналого-цифрового преобразователя, выход которого подключен к шине внутреннего интерфейса вычислительной машины, а вход масштабирующего усилителя подключен к тестовому выходу датчиков угловой скорости.
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2008 |
|
RU2377502C1 |
| US 4347730 A, 07.09.1982 | |||
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ С ПОМОЩЬЮ РЕАКТИВНЫХ МАХОВИКОВ | 2004 |
|
RU2281233C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ПОДДЕРЖАНИИ ЗАДАННОЙ ОРИЕНТАЦИИ С ПОМОЩЬЮ РЕАКТИВНЫХ МАХОВИКОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2281232C2 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |

