Настоящее изобретение относится к измерительной технике, в частности к определению местоположения стрелка на местности с использованием звуковых волн.
Из существующего уровня техники известен способ определения направления на источник звука, который включает два датчика звука, и по разности времени прихода звуковой волны определяется пеленг на источник звука. Кроме того, известны способы определения дальности, напр. патенты RU 2406964, 2494336, направления и другие координаты источника звука [1, 2, 3, 4].
Наиболее близким к заявленному техническому решению является патент RU 2377594 С1 «Способ определения координат объекта» - [1]. Дата начала отсчета срока действия патента: 23.06.2008. Опубликовано: 27.12.2009. Бюл. №36.
Недостатками данного технического решения являются:
- невысокая точность определения координат источника звука;
- метод итерации не всегда сходится и требует большого времени для расчетов.
Задачами, на решение которых направлено заявляемое изобретение являются:
- повышение точности определения координат с минимальными затратами машинного времени;
- однозначное и надежное определение трех пространственных координат, полностью определяющих местоположение стрелка.
Данные задачи решаются за счет того, что заявленный «Способ определения местонахождения стрелка по звуку выстрела», включающий размещение датчиков, регистрирующих возмущение воздушной среды, в измерительных точках с известными координатами, регистрацию датчиками сигнала от объекта, определение моментов времени ti, соответствующих достижению сигналом каждого из датчиков, и интервалов времени Δti, соответствующих задержке распространения сигнала относительно одного из датчиков, выбранного за базовый, определение координат объекта на основании полученных данных и координат измерительных точек, датчики размещают не менее чем в четырех измерительных точках с известными координатами, образующих пространственную фигуру, определяют расстояния Rzi, пройденные сигналом от объекта за определенные ранее интервалы времени Δti, в области поиска задают точки Sk, для которых определяют расстояния RSki до каждого из датчиков, при этом Rzi и RSki определяют с учетом данных о состоянии невозмущенной воздушной среды, а за координаты объекта принимают координаты такой точки Sk, для которой выражение
Σ(RSki-(Rk+Rzi))2
имеет минимальное значение,
где RSki - расстояние от i-ого датчика до некоторой точки Sk, принадлежащей области поиска, i=1÷N; N≥4;
Rk - расстояние от базового датчика до точки Sk;
Rzi - расстояния, пройденные сигналом от объекта за интервалы времени Δti,
отличающийся тем, что с целью повышения точности, надежности и скорости определения координат источника звука данная задача может быть решена так, что три датчика помещают в горизонтальной плоскости на известных расстояниях вдоль прямой, перпендикулярной возможному местонахождению источника звука, а четвертый датчик звука размещают на вертикали от базового датчика также на известном расстоянии, определяют разности времени прихода звуковой волны к датчикам относительно базового датчика, решают систему трех линейных уравнений с тремя неизвестными, получают координаты стрелка.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является повышение точности и надежности измерения пространственных координат стрелка и быстродействия вычислительного процесса.
Сущность изобретения поясняется чертежами, на которых изображено:
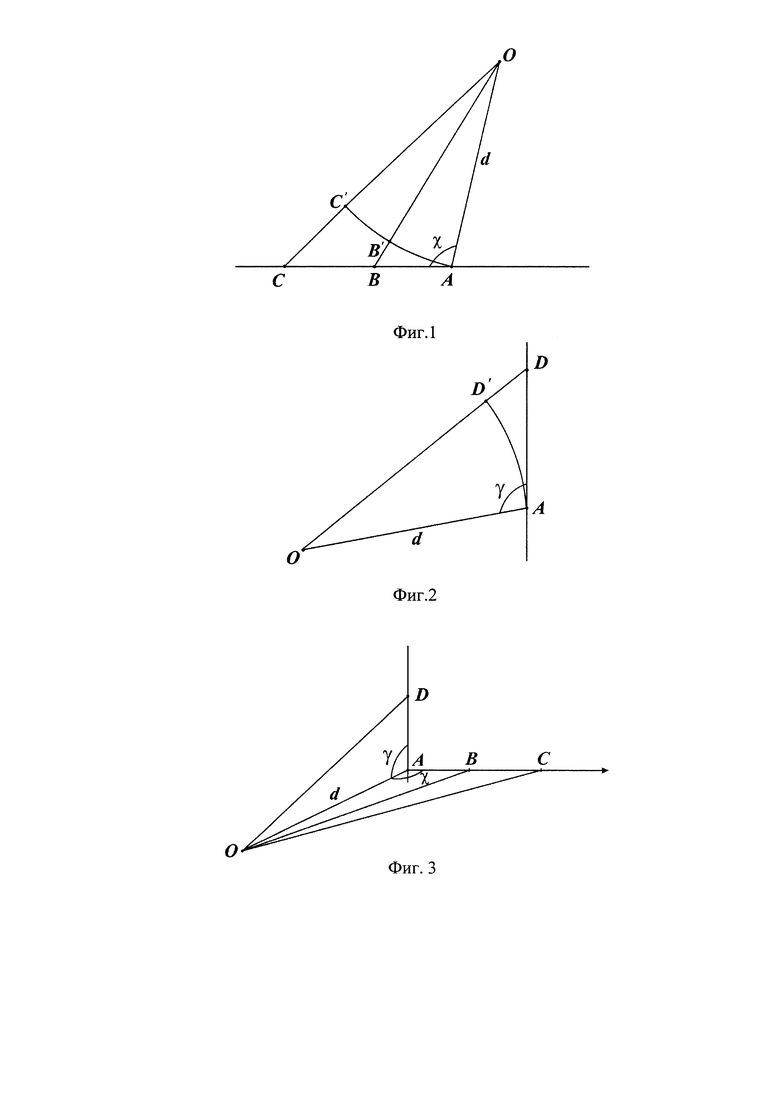
На фиг. 1 представлена плоская картина распространения звука в плоскости, близкой к горизонтальной. Звук распространяется из точки О и достигает в разное время датчиков. Согласно фиг.1, звук достигает сначала датчика А, затем датчика В, затем датчика С, при этом время прихода звука в точку А(tA) принимается как базовое, а время прихода звука в точки В(tB) и C(tC) характеризуются разностями Δt1=tB-tA, Δt2=tC-tA, датчик А взят за базовый. Датчики А, В, С фиксируют приход звуковой волны и определяют значения разности прихода звука в эти точки. Эти датчики расположены в горизонтальной плоскости и находятся на одной прямой и на известных расстояниях друг от друга.
На фиг. 2 представлен чертеж для определения третьей координаты стрелка - угла возвышения γ точки выстрела относительно горизонтали, в которой расположен датчик А (принятый за базовый). Четвертый датчик Д расположен в вертикальной плоскости и находится на вертикали точки А.
На фиг. 3 представлен общий чертеж в трех координатах и показывает взаимное расположение источника звука и датчиков. Согласно фиг.3, источник звука расположен ниже горизонтальной плоскости и также, согласно фиг.3, звук приходит сначала в точку с датчиком А, затем с какими-то временными задержками - в точки с датчиками В, С, D.
Работает устройство по данному способу следующим образом.
Пусть имеем скорость распространения звука в воздухе равной v. Эта скорость легко рассчитывается и в основном зависит от температуры воздуха. Необходимо определить направление на точку О - угол χ и расстояние OA=d. Согласно фиг. 1, одновременно с приходом звука в точку А звук приходит и в точки В' и С'.
Рассмотрим два косоугольных треугольника ОАВ и О АС. Воспользуемся формулой расчетов:
а 2=b2+с2-2b⋅с⋅cosA,
где сторона а расположена напротив угла А. Обозначим этот угол буквой χ.
Имеем:
Эта система двух уравнений содержит два неизвестных параметра: угол χ и расстояние OA=d.
В свою очередь сторона OB=d+ν⋅Δt1, и ОС=d+ν⋅Δt2,
где Δt1=tB-tA, Δt2=tC-tA
Запишем:

Здесь обозначено АВ=а, ВС=b.
Раскроем скобки и упростим выражение, получим:

Если обозначить
а 1=2⋅ν⋅Δt1,
а 2=2⋅ν⋅Δt2,
b1=2⋅а,
b2=2⋅(а+ b),
с1=а2-(ν⋅Δt1)2,
с2=(а+b)2-(ν⋅Δt2)2,
то тогда:
Это система двух уравнений с двумя неизвестными. Обозначим d=х1, d⋅cosχ=x2 тогда:
Для определения двух переменных - угла χ и расстояния d, надо решить представленную систему уравнений для конкретных, известных и измеренных значений ν, Δt1, Δt2. Для расчета третьего параметра угла возвышения γ получим еще одно линейное алгебраическое уравнение, обозначим расстояние OD, равное l, a AD равным h, тогда согласно фиг. 2 имеем:
l=ν⋅Δt3+d,
а из треугольника OAD:
l2=h2+d2-2h⋅d⋅cosγ,
откуда:

где Δt3=tD-tA.
Обратим внимание на то, что углы χ и γ в общем случае не равны между собой, они лежат в разных плоскостях.
Расчеты по данным формулам показывают, что неизвестные параметры (координаты стрелка) определяются с высокой точностью и с высоким быстродействием. Исключением являются углы χ=0 и χ=180 градусов, при этих азимутальных углах ошибки возрастают до больших величин.
Литература
1. Патент РФ №2 377 594. Способ определения координат объекта. Гришин Алексей Валерьевич (RU), Кортюков Иван Иванович (RU), Ниточкин Евгений Николаевич (RU), Хорошко Алексей Николаевич (RU), Штарев Сергей Леонидович (RU) Российская Федерация, от имени которой выступает государственный заказчик - Государственная корпорация по атомной энергии"Росатом" (RU), Федеральное государственное унитарное предприятие "Российский федеральный ядерный центр - Всероссийский научно-исследовательский институт экспериментальной физики" - ФГУП "РФЯЦ-ВНИИЭФ" (RU) Начало действия патента 23.06.2008.
2. Патент №2 323 449. Способ определения пеленга источника звука. Шмелев В.В. и др. - 2006 г.
3. Патент №2 494 336. Способ оценки дальности до точки выстрела. - 2010 г.
4. Патент №2 406 964. Устройство для определения координат места выстрела из огнестрельного оружия. - 2010 г.
5. Красильников В.А. Звуковые и ультразвуковые волны в воздухе, воде и твердых телах. - М.: государственное издательство физико-математической литературы. 1960.
6. Звукометрия. Часть 1. Теория звуковой разведки и пристрелка по звуку. 1931.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА ПО ЗВУКУ ВЫСТРЕЛА ПРИ ДВИЖЕНИИ ОБЪЕКТА ОБСТРЕЛА | 2018 |
|
RU2704955C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ПОЛЕТА СВЕРХЗВУКОВОГО СНАРЯДА | 2016 |
|
RU2670731C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2008 |
|
RU2377594C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОПАДАНИЯ ПУЛЬ | 2008 |
|
RU2367885C1 |
| Способ определения координат источников акустической эмиссии при планарной локации | 2024 |
|
RU2830422C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| УСТРОЙСТВО СТРЕЛЬБЫ ИЗ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 2015 |
|
RU2600177C2 |
| СПОСОБ КАЛИБРОВКИ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ДАТЧИКОВ В СИСТЕМЕ ОБНАРУЖЕНИЯ ВЫСТРЕЛА | 2005 |
|
RU2347234C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ ПУЛЬ И СНАРЯДОВ | 2011 |
|
RU2470252C1 |
Изобретение относится к измерительной технике, в частности к определению местоположения стрелка на местности с использованием звуковых волн. .Достигаемый технический результат – повышение точности определения координат стрелка. Указанный результат достигается за счет расположения трех датчиков, включая базовый, на одной прямой линии в горизонтальной плоскости на известных расстояниях одного от другого и одного датчика на вертикали от базового датчика также на определенном, известном расстоянии, при этом измерение промежутков времени рассогласования прихода звуковой волны до базового датчика и всех остальных датчиков позволяет сформировать три линейных уравнения и рассчитать координаты точки местонахождения стрелка по звуку выстрела за счет решения этой системы уравнений. 3 ил.
.
Способ определения местонахождения стрелка по звуку выстрела, включающий размещение датчиков, регистрирующих возмущение воздушной среды, в измерительных точках с известными координатами, регистрацию датчиками сигнала от объекта, определение моментов времени ti, соответствующих достижению сигналом каждого из датчиков, и интервалов времени Δti, соответствующих задержке распространения сигнала относительно одного из датчиков, выбранного за базовый, определение координат объекта на основании полученных данных и координат измерительных точек, датчики размещают не менее чем в четырех измерительных точках с известными координатами, образующих пространственную фигуру, определяют расстояния Rzi, пройденные сигналом от объекта за определенные ранее интервалы времени Δti, в области поиска задают точки Sk, для которых определяют расстояния RSki до каждого из датчиков, при этом Rzi и RSki определяют с учетом данных о состоянии невозмущенной воздушной среды, а за координаты объекта принимают координаты такой точки Sk, для которой выражение
Σ(RSki-(Rk+Rzi))2
имеет минимальное значение,
где RSki - расстояние от i-ого датчика до некоторой точки Sk, принадлежащей области поиска, i=1÷N; N≥4;
Rk - расстояние от базового датчика до точки Sk;
Rzi - расстояния, пройденные сигналом от объекта за интервалы времени Δti,
отличающийся тем, что три датчика, первый из которых выбирается базовым, помещают в горизонтальной плоскости на известных расстояниях вдоль прямой, перпендикулярной возможному местонахождению источника звука, четвертый датчик размещают на вертикали от базового датчика также на известном расстоянии, при этом на основании известного расположения датчиков, известных расстояний между ними, измеренной разности времени прихода звуковой волны к датчикам относительно базового датчика, а также с учетом скорости распространения звука в воздухе получают координаты стрелка, решая систему уравнений с тремя неизвестными, причем неизвестными являются:
- расстояние d между базовым датчиком и стрелком;
- угол χ между прямой, вдоль которой размещают три датчика, и прямой между базовым датчиком и стрелком, при этом должно выполняться условие: χ≠0 и χ≠180°;
- угол γ между вертикалью, на которой расположен четвертый датчик, и прямой между базовым датчиком и стрелком.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2008 |
|
RU2377594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА НА МЕСТНОСТИ | 2005 |
|
RU2285272C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ВЫСТРЕЛА ИЗ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ (ВАРИАНТЫ) | 2008 |
|
RU2406964C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| US 5241518 A, 31.08.1993 | |||
| US 5920522 A, 30.04.1985 | |||
| WO 2006096208 A2, 14.09.2006. | |||

