Изобретение относится к измерительной технике, в частности, к определению местоположения стрелка на местности при движении объекта обстрела с использованием звука от выстрела.
Из существующего уровня техники известен способ определения направления на источник звука, который включает два датчика звука и по разности времени прихода звуковой волны определяется пеленг на источник звука - [1]. Кроме того, известны способы определения дальности, например, патенты №№2406964, 2494336, известны также устройства и способы, определяющие координаты с использованием датчиков звука [2, 3, 4, 5].
Наиболее близким к заявленному техническому решению является: «Способ определения местоположения стрелка по звуку выстрела» - [2]. Патент №2610908 Российская Федерация. Антропов В.А., Антропов А.В., Успаленко В.Б., 2017 год.
Недостатком данного технического решения является:
- невозможность решения задачи при движении объекта.
Задачи, на решение которых направлено заявляемое изобретение являются:
- определение координат стрелка при движении объекта обстрела в реальных условиях передвижения войск и техники;
- обеспечение точности определения координат с минимальными затратами машинного времени;
- минимизация времени вычислительного процесса;
- однозначное и гарантированное определение трех пространственных координат, служащих основанием для использования устройств подавления средств обстрела.
Данные задачи решаются за счет того, что заявленный способ определения координат объекта, включает размещение четырех датчиков, регистрирующих возмущение воздушной среды, в измерительных точках с известными координатами, регистрацию датчиками звукового сигнала от выстрела, определение моментов времени ti, соответствующих достижению сигналом каждого из датчиков, и интервалов времени Δti, соответствующих задержке распространения сигнала к периферийным датчикам относительно одного из датчиков, выбранного за базовый, определение координат стрелка на основании полученных данных и координат датчиков. Датчики размещают следующим образом: три датчика располагаются вдоль прямой, перпендикулярной возможному направлению на стрелка в горизонтальной плоскости и на известных расстояниях друг от друга, при этом первый из этих датчиков принимают за базовый, второй и третий (иногда будем называть периферийными), а четвертый датчик располагается на вертикали базового также на известном расстоянии. Анализ распространения звука позволяет составить три уравнения, решение которых позволяет определить неизвестные параметры, это: расстояния d между базовым датчиком и стрелком, угла χ между направлением на стрелка и прямой расположения периферийных датчиков, угла γ между направлением на стрелка и вертикалью базового датчика. Эти параметры находятся решением уравнений с учетом ограничений 180>χ>0. За счет движения объекта начальные расстояния между датчиками изменятся в соответствии с измеренными временными разностями прихода звуковой волны к периферийным датчикам относительно базового датчика и скоростью движения объекта. Что касается четвертого датчика, находящегося на вертикали базового датчика, то он фиксирует сигнал звука, который в совокупности с сигналом базового датчика дает разность сигналов, однако это измерение, как показывает анализ, несет ошибку, связанную с движением объекта и нуждается в корректировке.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является возможность определения местоположения стрелка при движении объекта, повышение точности измерения пространственных координат при минимальном времени расчета.
Сущность изобретения поясняется чертежами, на которых изображено:
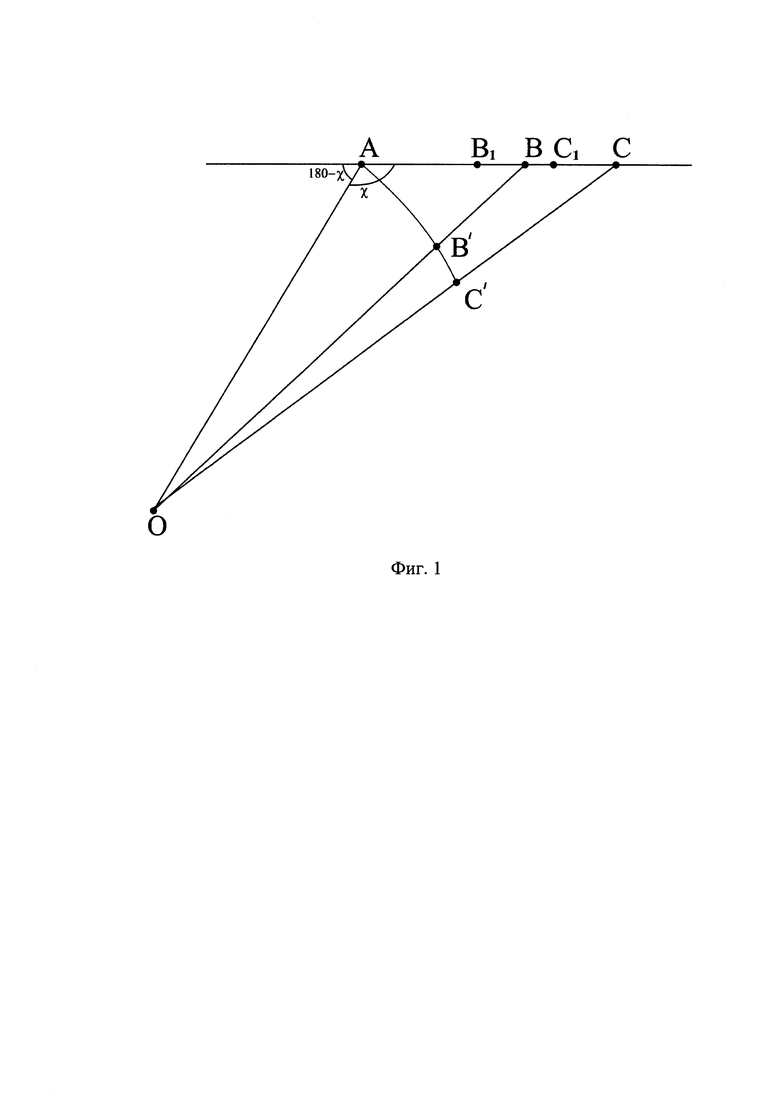
- на фиг. 1 представлена картина распространения звука в некоторой, в общем случае, наклонной плоскости; этот рисунок позволяет понять принцип формирования уравнений при расчете неизвестных параметров местоположения стрелка.
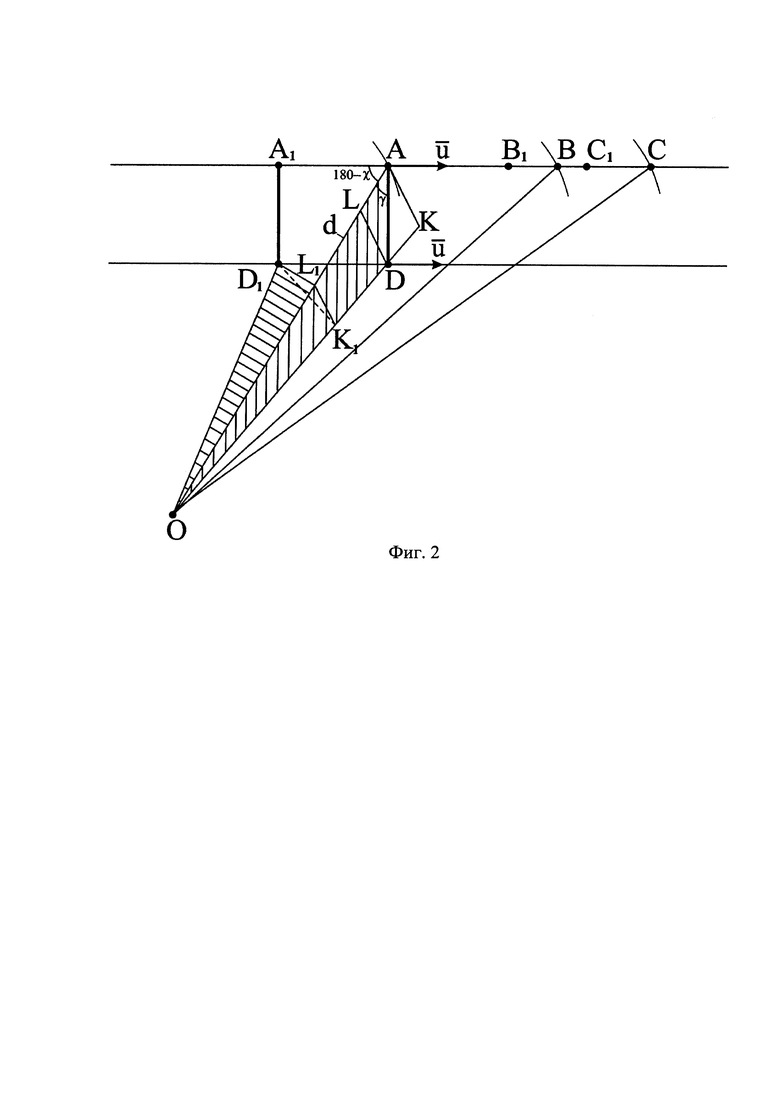
- на фиг. 2 представлена схема, позволяющая определить текущие координаты периферийных датчиков из-за движения объекта, а также определить истинное значения времени рассогласования в приходе звуковой волны к датчикам D и А.
Работает устройство по данному способу следующим образом.
Пусть имеем скорость распространения звука в воздухе равной ν, а скорость движения объекта обстрела известна, примем ее равной u. Скорость звука в воздухе легко рассчитывается по формулам физики и в основном зависит от температуры воздуха. Пусть необходимо определить направление на точку О - угол χ и расстояние OA=d. Согласно фиг. 1, с приходом звука в точку А, звук одновременно приходит и в точки В' и С'. Расстояния ВВ' и СС' зависят от скорости звука и разностей времени прихода звука в точку A, и в точки В и С (в точках В' и С' находился звук в момент его прихода к датчику А). Из рисунка видно, что за время преодоления звуком расстояния ВВ' датчик звука переместится из точки B1 в точку В. Соответственно за время преодоления звуком расстояния СС' датчик звука переместится из точки C1 в точку С.
Местоположение датчиков А, В и С являются определяющими при нахождении координат местоположения стрелка и именно в моменты прихода к ним звуковой волны. Это положение не изменяется придвижении объекта, как и в статической постановке [2].
Звук распространяется из точки О, координаты которой определяются в данной задаче, и достигает в разное время датчиков. Согласно фиг. 2, звук при данном расположении датчиков и местоположении точки выстрела достигает сначала датчика D, затем датчика A, затем датчиков В и С. В момент достижения звуком датчика А датчики В и С находились в точках В1 и С1 соответственно. Звуковая волна достигает этих датчиков в точках В и С, координаты которых учитывают факт перемещения датчиков из-за движения объекта. Координаты точек В и С участвуют в составлении уравнений для решения навигационной задачи. Расстояния АВ1 и В1С1 были первоначальным и известным расположением датчиков В и С на прямой АС. С учетом движения объекта эти датчики переместились в точки В и С. При этом расстояния ВВ1 и СС1 равны:
ВВ1=u⋅Δt1, СС1=u⋅Δt2,
где Δt1=tB-tA - разница прихода звуковой волны к датчикам А и В;
Δt2=tC-tA - разница времени прихода звуковой волны к датчикам А и С;
u - скорость движения объекта обстрела.
В данном случае датчик А был принят за базовый и относительно его определяются промежутки времени достижения звука датчиков. Рассмотрим принцип определения координат стрелка.
Для этого рассмотрим два косоугольных треугольника ОАВ и ОАС - фиг. 1. В этих треугольниках OA и ОВ' равны между собой: ОА=ОВ', и аналогично ОА=ОС', как радиусы одной окружности. Воспользуемся теоремой косинусов:
а 2=b2+с2-2bc⋅cosA,
где треугольник ABC является косоугольным, а сторона а расположена против угла А (угол А это угол ОАВ, угол между направлением на точку выстрела и прямой расположения датчиков звука). Примем значение угла А равным χ.
Для нашего случая (фиг. 1) имеем:
Эта система двух уравнений содержит два неизвестных параметра: угол χ и расстояние OA=d, все остальные параметры известны, в том числе расстояние от датчика А до датчика В равно а, с учетом движения объекта обстрела расстояние а увеличится за счет движения объекта, расстояние от датчика С до датчика А исходное равно a+b, но оно аналогично увеличится, при этом приращения расстояний а и а+b не равны между собой, а они пропорциональны промежуткам времени Δt1 и Δt2.
В свою очередь сторона OB=d+ν⋅Δt1 и ОС=d+ν⋅Δt2;
где Δt1=tB-tA, Δt2=tC-tA
Запишем:

Здесь обозначено АВ=а+u⋅Δt1, ВС=b+u⋅Δt2.…
Раскроем скобки и упростим выражение, получим:

Если обозначить:
а 1=2⋅ν⋅Δt1,
а 2=2⋅ν⋅Δt2,
b1=2⋅a+u⋅Δt1,
b2=2⋅(a+b+u⋅Δt2),
с1=(а+u⋅Δt1)2-(ν⋅Δt1)2,
c2=(a+b+u⋅Δt2)2-(ν+Δt2)2,
то имеем:
Это система двух уравнений с постоянными коэффициентами и двумя неизвестными. Обозначим
d=x1, d⋅cosχ=x2;
тогда:
Расчет этой системы уравнений позволяет определить две переменных - угол χ и расстояние d.
Для расчета третьего параметра, угла возвышения γ, обозначим расстояние OD равное l, тогда согласно фиг. 2 имеем:
l=d-ν⋅Δt3,
где Δt3=tD-tA - рассогласование времени прихода звуковой волны к датчикам D и A в точках D и A.
Из треугольника OAD найдем третье уравнение системы:
l2=h2+d2-2⋅h⋅d⋅cosγ,
откуда:
или
здесь h=AD.
Параметр γ может быть определен из вышеприведенных выкладок, а может быть определен и из системы трех уравнений.
Таким образом, по данному способу определения местоположения стрелка при движении объекта обстрела составляются три уравнения, из которых определяются неизвестные параметры γ, d, χ. Все три уравнения представлены в тексте выше.
Динамика данной задачи приводит к необходимости отдельного определения Δt3, которое в статической постановке определяется однозначно, как разность прихода звуковой волны к датчикам D и A.
Вернемся к фиг. 2. Согласно рисунку, звук от выстрела сначала приходит к датчику звука в точку D1, затем звук приходит к базовому датчику в точку А. Однако, за счет того, что объект движется, а датчики А и D находятся на одной вертикали, то временное расстояние между этими точками оказываются зависящими как от расстояния AD, так и от времени движения объекта от прихода звуковой волны к датчику D (в точке D1) до прихода звуковой волны к датчику А. Согласно фиг. 2 расстояние OD может быть записано в виде
OD=d-Δt3⋅ν.
Время, за которое датчик D преодолел расстояние
DD1=u⋅δt3,
где δt3=tD-tA - время рассогласования между приходом звука к датчику D (в точке D1) и к датчику А (в точке А).
В момент, когда датчик D получил звуковой сигнал (точка D1), звук находился, также, в точке L1. Далее датчик D1 движется в сторону точки D со скоростью u, а звук движется из точки К1 к точке К со скоростью звука ν. За время δt3 звуковая волна оказалась в точке К, пройдя через точку D, значит, разность прихода волны в точки А и D численно равна времени прохождения этой волной расстояния DK, то есть
Δt3=DK/ν.
Именно DK является характеристикой временного рассогласования между временем прихода звука к датчику D и датчику А.
Здесь умышленно введены обозначения δt3 (измеренное) не равное Δt3 (вычисленное) значение.
Для определения расстояния DK заметим, что OA=OK, OD=OL и OD1=OK1 (как радиусы окружностей), отсюда следует вывод, что DK=AL. Примем, что угол D1K1D=90 градусов, а угол D1DK1=χ ввиду того, что расстояние OD много больше величины AD (это единственное в данной работе приближение).
Тогда из треугольника D1K1D найдем
K1D=δt3⋅(u⋅cos(180-χ)).
За время δt3 точка D1 переместилась в точку D, а звук переместился из точки К1 в точку К. Учтя это, длина отрезка
DK=δt3⋅(ν-u⋅cos(180-χ)).
Или
Δt3=δt3⋅(ν-u⋅cos(180-χ))/ν.
Из приведенных соотношений видно, что величина δt3 не равна Δt3. Это видно также из выражений
DK=δt3⋅(ν-u⋅cos(180-χ)) и Δt3=DK/ν.
Чем выше скорость объекта u, тем больше вклад скорости объекта обстрела в значение δt3. Расчеты показывают, что пройденный путь объектом за время δt3 составляет единицы сантиметров, а то и миллиметры, но далее они сказываются на величине Δt3, а та, в свою очередь, на значение γ, что нежелательно, так как этот параметр является решающим при нахождении азимута при инструментальной реализации способа.
Влияние движения объекта приводит к ошибкам в измерении Δt3 из-за того, что скорость объекта в одном случае увеличивает путь, проходимый звуковой волной (при углах χ более 90 градусов), а в другом случае (при углах χ менее 90 градусов) уменьшает этот путь за счет проекции скорости объекта на направление распространения звука.
Таким образом, расчет Δt3 по формуле
Δt3=δt3⋅(ν-u⋅cos(180-χ))/ν
позволяет более точно определить этот параметр, а не опираться на измеренное значение δt3.
Расчеты показали, что чем выше скорость объекта u, тем больше вклад скорости объекта обстрела в значение δt3. При скоростях объекта в пределах от 36 до 72 км/час (10…20 м/с) величина Δt3 всегда отличается от δt3, т.е. влиянием неравенства δt3 и Δt3 нельзя пренебречь; нужно измерять δt3, а затем с использованием формулы вводить поправку и вычислять Δt3,
Что касается влияния скорости объекта на местоположение датчиков, то это влияние достаточно велико. Например, изменение положения датчиков относительно базового датчика при углах χ близких к 0 и 180 градусам при начальном разнесении датчиков от базового датчика а=5 метров, b=5 метров и скоростях движения объекта 20 м/с и звука - 330 м/с, Δt1=0,016129 сек., Δt2=0,0343392 сек. коррекция а составляет 0,32258 метра, а+b - соответственно 0,64516 метра, что, конечно, значимо для целей навигации.
Авторами были проведены численные расчеты, подтверждающие предложенный в работе способ. Эти результаты не вошли в данный материал, так как оказались слишком объемными и заслоняющими материалы данной заявки. При необходимости они могут быть представлены в адрес ФИПС.
Литература
1. Патент РФ №2377594. Способ определения координат объекта. Гришин Алексей Валерьевич (RU), Кортюков Иван Иванович (RU), Ниточкин Евгений Николаевич (RU), Хорошко Алексей Николаевич (RU), Штарев Сергей Леонидович (RU) Российская Федерация, - Всероссийский научно-исследовательский институт экспериментальной физики" - ФГУП "РФЯЦ-ВНИИЭФ" (RU). Начало действия патента 23.06.2008 год.
2. Патент №2 610908 Российской Федерации. Способ определения местоположения стрелка по звуку выстрела. Антропов В.А., Антропов А.В., Успаленко В.Б., 2017 год.
3. Патент №2323449. Способ определения пеленга источника звука. Шмелев В.В. и др. - 2006 г.
4. Патент №2494336. Способ оценки дальности идо точки выстрела. - 2010 г.
5. Патент №2406964. Устройство для определения координат места выстрела из огнестрельного оружия. - 2010 г.ц
6. Красильников В.А. Звуковые и ультразвуковые волны в воздухе, воде и твердых телах. - М.: Государственное издательство физико-математической литературы. 1960.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА ПО ЗВУКУ ВЫСТРЕЛА | 2015 |
|
RU2610908C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ПОЛЕТА СВЕРХЗВУКОВОГО СНАРЯДА | 2016 |
|
RU2670731C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОПАДАНИЯ ПУЛЬ | 2008 |
|
RU2367885C1 |
| Способ определения координат источников акустической эмиссии при планарной локации | 2024 |
|
RU2830422C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2008 |
|
RU2377594C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| Способ обнаружения подводного источника широкополосного шума | 2022 |
|
RU2787951C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2436231C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2436260C1 |
| АКУСТИЧЕСКАЯ СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434278C1 |
Изобретение относится к измерительной технике, в частности к определению местоположения стрелка на местности при движении объекта обстрела с использованием звука от выстрела, и предполагает его использование при передвижениях войск и техники на железнодорожном и автомобильном транспорте, при движении в строю. Способ основан на использовании чувствительных к звуку датчиков, расположение которых и количество позволяют определить координаты точки выстрела - стрелка, включая расстояние до стрелка, угла между прямой расположения датчиков звука и направлением на стрелка, а также угла наклона этой же прямой в вертикальной плоскости. Отличительными особенностями способа являются введение поправок к начальному местоположению датчиков вследствие движения объекта обстрела и в соответствии с измеренными промежутками времени между поступлением звукового сигнала от выстрела к периферийным датчикам и базовому датчику, измерение рассогласования прихода сигнала к двум датчикам, находящимся в вертикальной плоскости на одной прямой. При этом вводится поправка в измеренное значение, зависящая от скорости движения объекта и скорости распространения звуковой волны, а также от угла наклона прямой, связывающей стрелка и прямую расположения трех измерительных датчиков. Определено соотношение для введения вышеназванной поправки. Введение поправки непосредственно связано с динамическим характером определения координат стрелка и необходимо для обеспечения необходимой точности. Технический результат – обеспечение возможности определения местоположения стрелка при движении объекта. 2 ил.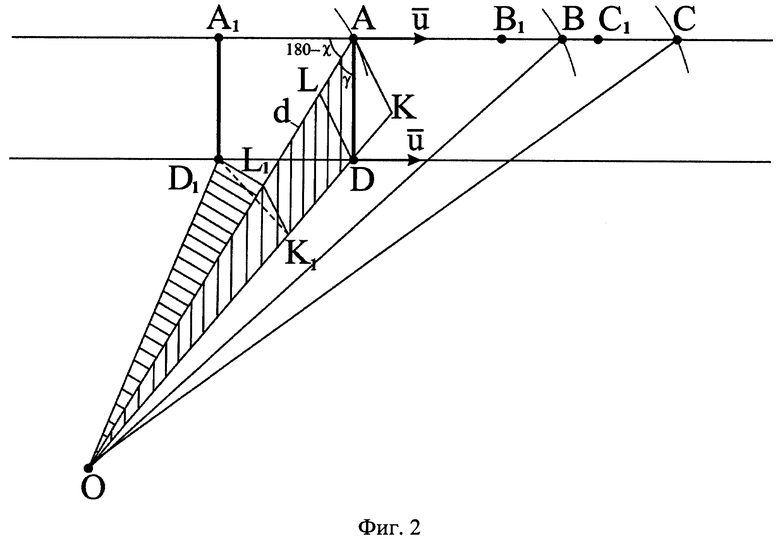
Способ определения местоположения стрелка по звуку выстрела при прямолинейном движении объекта обстрела, включающий три датчика звука, первый из которых выбирается базовым, которые помещают в горизонтальной плоскости на известных расстояниях вдоль прямой, перпендикулярной возможному местонахождению источника звука, четвертый датчик размещают на вертикали от базового датчика также на известном расстоянии, при этом, на основании известного расположения датчиков, известных расстояний между ними, измеренной разности времени прихода звуковой волны к датчикам относительно базового датчика, а также с учетом скорости распространения звука в воздухе, получают координаты стрелка, решая систему уравнений с тремя неизвестными, причем неизвестными являются:
- расстояние d между базовым датчиком и стрелком;
- угол χ между прямой, вдоль которой размещают три датчика и прямой между базовым датчиком и стрелком, при этом должно выполняться условие 180>χ>0 (градусов);
- угол γ между вертикалью, на которой расположен четвертый датчик, и прямой между базовым датчиком и стрелком, отличающийся тем, что расстояния между тремя датчиками, находящимися на одной горизонтальной прямой, определяют как сумму их начального распределения вдоль горизонтальной прямой с приращениями, полученными за счет движения объекта и в соответствии с измеренными рассогласованиями по времени, а измеренная с помощью двух датчиков, расположенных на одной вертикальной прямой, разность времени прихода звука корректируется с учетом скорости движения объекта, скорости звука и угла χ между направлением на стрелка и прямой расположения трех датчиков.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА ПО ЗВУКУ ВЫСТРЕЛА | 2015 |
|
RU2610908C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ В ПРОСТРАНСТВЕ И ВО ВРЕМЕНИ ПУЛЬ И СНАРЯДОВ | 2011 |
|
RU2470252C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА НА МЕСТНОСТИ | 2005 |
|
RU2285272C1 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ ДО ТОЧКИ ВЫСТРЕЛА | 2008 |
|
RU2494336C2 |
| US 7586812 B2, 08.09.2009. | |||

