Ссылка на связанные заявки
Настоящая заявка испрашивает приоритет предварительной патентной заявки США № 60/708066, поданной 12 августа 2005.
Предшествующий уровень техники
Настоящая заявка раскрывает изобретение, которое относится, в целом и во многих вариантах осуществления, к системе и способу для параллельного управления приводами переменной частоты.
Приводы переменной частоты известны в технике. Приводы переменной частоты обычно включают в себя схему управления и схему питания. Для применений синхронного двигателя привод переменной частоты может также включать в себя источник возбуждения. Схема управления управляет работой схемы питания, а для применений синхронного двигателя также запускает/отключает связанный источник возбуждения. Схема питания может включать в себя выпрямитель и инвертор и подает мощность в обмотку двигателя, соединенного с приводом переменной частоты. Для применений синхронного двигателя источник возбуждения подает мощность на возбудитель для схемы возбуждения двигателя.
Схема управления обычно включает в себя регулятор скорости, регулятор потока, регулятор тока намагничивания, регулятор тока крутящего момента, DQ-3Ф трансформатор, модулятор ширины импульса и модель двигателя. Регулятор скорости предоставляет опорное значение тока намагничивания, а регулятор потока предоставляет опорное значение тока крутящего момента. Схема управления сравнивает опорное значение тока намагничивания с измеренным током намагничивания, и регулятор тока намагничивания определяет опорное значение напряжения оси Q. Схема управления также сравнивает опорное значение тока крутящего момента с измеренным током крутящего момента, и регулятор тока крутящего момента определяет опорное значение напряжения оси D. Дополнительные сигналы прямой связи могут быть добавлены к опорному значению напряжения оси D и опорному значению напряжения оси Q для обеспечения более высокого динамического отклика. DQ-3Ф трансформатор преобразует опорное значение напряжения оси Q и опорное значение напряжения оси D из двухфазной информации в трехфазные значения. Модулятор ширины импульса преобразует трехфазные значения в команды коммутации, которые посылаются на схему питания. Модель двигателя обычно использует измеренные сигналы напряжения и/или тока для определения параметров двигателя, таких как скорость двигателя, поток двигателя, угол потока двигателя. Для применений, где низкая стоимость является коммерческим требованием, модель двигателя может использовать только выходной ток привода переменной частоты или ток двигателя, чтобы определить параметры двигателя. Модель двигателя также преобразует измеренные токи в компонент тока намагничивания и компонент тока крутящего момента для использования в регуляторе тока намагничивания и регуляторе тока крутящего момента соответственно.
Многие из функций, выполняемых схемой управления, реализуются программным обеспечением. Программное обеспечение создается так, что вычисления выполняются при двух или более различных скоростях, чтобы сэкономить время исполнения процессора. В принципе, модулятор ширины импульса работает на наивысшей скорости и обычно реализован аппаратными средствами. Блоки регулятора тока намагничивания, регулятора тока крутящего момента и DQ-3Ф трансформатора обычно исполняются с частотой данных 1-10 кГц, так что быстрый отклик управления достигается в ограничении выходного тока привода переменной частоты в случае внезапных изменений в нагрузке или выходной цепи. Регулятор скорости и регулятор потока обычно работают с более медленной скоростью 100-1000 Гц, потому что как скорость двигателя, так и поток двигателя изменяются с намного более медленной скоростью, чем ток намагничивания или ток крутящего момента. Модель двигателя также обычно вычисляется с этой скоростью. Коммуникации от схемы управления во внешнюю среду, что включает в себя передачи к внешнему устройству (от потребителя), в типовом случае выполняются с частотой 1-10 Гц.
Если мощность, которая должна доставляться в нагрузку, превышает мощность, доступную от одного привода переменной частоты, то известно соединение некоторого количества приводов переменной частоты параллельно, чтобы удовлетворить требования мощности нагрузки. Для управления такими параллельными конфигурациями часто используется конфигурация «задающий-подчиненный». В конфигурации «задающий-подчиненный» задающий контроллер часто работает как интерфейс между внешними средствами управления (например, средствами управления потребителя) и различными приводами переменной частоты. Соответствующие схемы управления осуществляют связь с задающим контроллером, а также связываются непосредственно друг с другом.
В принципе, для конфигурации «задающий-подчиненный» один привод переменной частоты конфигурируется как задающий привод, в другие приводы переменной частоты конфигурируются как подчиненные приводы. Задающий привод обычно выполняет функцию регулятора скорости и функцию регулятора потока и выдает команды тока (опорное значение тока крутящего момента и опорное значение тока намагничивания) самому себе и всем подчиненным приводам. Подчиненные приводы работают по командам тока с задающего привода и не используют свои соответствующие регуляторы скорости и регуляторы потока. Таким образом, подчиненные приводы работают с меньшим числом регуляторов, чем задающий привод. Подчиненные приводы используют команды тока с задающего привода для регулирования каждого из своих выходных токов и формирования требуемого напряжения двигателя. В дополнение к командам тока задающий привод должен также посылать информацию либо угла потока двигателя, либо частоты двигателя на подчиненные приводы, чтобы позволить подчиненным приводам преобразовывать соответствующие опорные значения напряжения оси Q и опорные значения напряжения оси D в корректную трехфазную систему отсчета. Для обеспечения хороших динамических характеристик требуемая скорость информационного обмена между задающим приводом и подчиненными приводами находится в диапазоне 100-1000 Гц. Задающему приводу требуется знание о подчиненных приводах, чтобы подчиненный привод мог конфигурироваться как новый задающий привод в случае, если первоначальный задающий привод необходимо удалить из системы.
Для надлежащей работы от каждого привода переменной частоты требуется знать его положение в системе (либо задающего, либо подчиненного) и требуется работать по-разному, в зависимости от его положения. Так как задающий привод выполняет больше задач, чем подчиненные приводы, управление задающим приводом является более сложным, чем управление подчиненными приводами. Хотя конфигурация «задающий-подчиненный» работает хорошо для ряда различных применений, конфигурация «задающий-подчиненный» имеет тенденцию к относительной сложности и является относительно дорогостоящей в реализации.
Сущность изобретения
В одном общем аспекте настоящая заявка раскрывает систему для параллельного управления приводами переменной частоты. Согласно различным вариантам осуществления, система содержит задающий контроллер и, по меньшей мере, два независимых привода переменной частоты, осуществляющие связь с задающим контроллером. Каждый привод переменной частоты содержит схему питания и контроллер, осуществляющий связь со схемой питания. Контроллер содержит модуль снижения скорости и модуль совместного использования потока. Модуль снижения скорости структурирован и конфигурирован для регулирования компонента тока крутящего момента в приводе переменной частоты. Модуль совместного использования потока структурирован и конфигурирован для регулирования компонента тока намагничивания в приводе переменной частоты.
В другом общем аспекте настоящая заявка раскрывает способ для параллельного управления приводами переменной частоты. Согласно различным вариантам осуществления способ содержит, для каждого привода переменной частоты, передачу значения компонента тока намагничивания на задающий контроллер и прием потребной скорости, потребного потока и среднего значения компонента тока намагничивания от задающего контроллера. Способ также содержит определение скорости двигателя и потока двигателя на основе измерений статорного напряжения и тока двигателя, связанного с приводом переменной частоты, определение опорного значения скорости на основе значения компонента тока крутящего момента и определение опорного значения потока на основе значения компонента тока намагничивания и среднего значения компонента тока намагничивания. Способ дополнительно содержит регулирование компонента тока крутящего момента на основе опорного значения скорости и/или регулирование компонента тока намагничивания на основе опорного значения потока.
Аспекты изобретения могут быть реализованы с помощью вычислительного устройства и/или компьютерной программы, сохраненной на машиночитаемом носителе. Машиночитаемый носитель может представлять собой диск, устройство и/или распространяющийся сигнал.
Описание чертежей
Различные варианты осуществления изобретения описаны здесь на примерах в связи со следующими чертежами.
Фиг.1 иллюстрирует различные варианты осуществления системы для параллельного управления приводами переменной частоты;
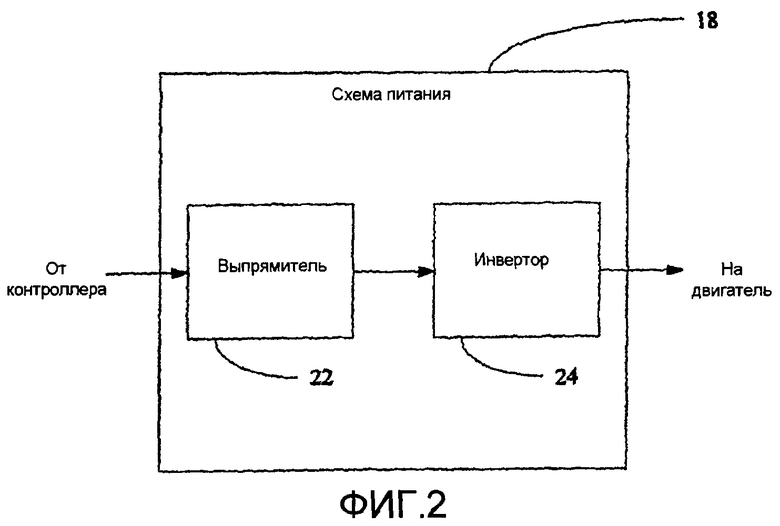
Фиг.2 иллюстрирует различные варианты осуществления схемы питания одного или более приводов переменной частоты системы по фиг.1;
Фиг.3 иллюстрирует различные варианты осуществления контроллера одного или более приводов переменной частоты системы по фиг.1;
Фиг.4 иллюстрирует различные варианты осуществления модуля снижения скорости контроллера по фиг.3, и
Фиг.5 иллюстрирует различные варианты осуществления модуля совместного использования потока контроллера по фиг.3.
Детальное описание
Понятно, что некоторые из чертежей и описаний изобретения упрощены для фокусировки на элементах, которые являются релевантными для ясного понимания изобретения, при исключении, в целях наглядности, других элементов, которые, как ясно специалистам в данной области техники, также могут образовывать часть изобретения. Однако поскольку такие элементы хорошо известны в технике и поскольку они не способствовали бы лучшему пониманию изобретения, описание таких элементов не предоставляется.
Фиг.1 иллюстрирует различные воплощения системы 10 для параллельного управления приводами переменной частоты. Система 10 содержит задающий контроллер 12 и независимые приводы 14 переменной частоты, осуществляющие связь с задающим контроллером 12. Хотя на фиг.1 показано только два привода 14 переменной частоты, специалистам в данной области техники должно быть понятно, что система 10 может содержать любое количество приводов 14 переменной частоты.
Задающий контроллер 12 может быть реализован как один или более программируемых логических контроллеров и может служить в качестве интерфейса между другими средствами управления (например, средствами управления потребителя) и приводами 14 переменной частоты. Задающий контроллер 12 структурирован и выполнен с возможностью связи с приводами 14 переменной частоты со скоростью данных, которая существенно ниже, чем любая скорость вычислений в приводах 14 переменной частоты. Как описано более детально ниже, удовлетворительное совместное использование тока между приводами 14 переменной частоты может быть реализовано со скоростью передачи данных порядка примерно 1-10 Гц, что существенно меньше, чем любая скорость вычислений в приводах 14 переменной частоты. Задающий контроллер 12 может посылать команды, такие как потребная скорость и поток, и запросы запуска и остановки, на каждый из приводов 14 переменной частоты. В ответ на это каждый привод 14 переменной частоты может передавать информацию статуса (например, работоспособен или неисправен) и информацию обратной связи (например, выходной ток, напряжение и частота) на задающий контроллер 12.
Каждый привод 14 переменной частоты содержит контроллер 16, осуществляющий связь с задающим контроллером 12, и схему 18 питания, осуществляющую связь с контроллером 16. Каждая схема 18 питания связана с обмоткой двигателя 20. В соответствии с различными вариантами осуществления каждая схема 18 питания может быть связана с отличающейся обмоткой многообмоточного двигателя переменного тока, с одной обмоткой однообмоточного двигателя переменного тока или любой комбинацией того и другого. Специалисту в данной области техники должно быть понятно, что система 10 может быть использована с любым типом двигателя переменного тока, таким как синхронный двигатель, индукционный двигатель или двигатель с постоянным магнитом. Для применений синхронных двигателей каждый привод 14 переменной частоты может также включать в себя источник возбуждения, который включается/выключается контроллером 16, и каждый источник возбуждения может быть соединен с возбудителем для схемы возбуждения двигателя, как известно в технике. Как показано на фиг.1, для каждого привода 14 переменной частоты напряжение, выведенное связанной схемой 18 питания, подается назад на связанный контроллер 16, и ток, выведенный связанной схемой 18 питания, также подается назад на связанный контроллер 16.
Приводы 14 переменной частоты не осуществляют связь непосредственно друг с другом. Каждый привод 14 переменной частоты структурирован и выполнен с возможностью осуществления связи с задающим контроллером 12 со скоростью данных, которая существенно меньше, чем любая скорость вычислений в приводах 14 переменной частоты (например, порядка 1-10 Гц). Относительно низкая скорость данных позволяет системе 10 быть проще и дешевле, чем системы, использующие конфигурации «задающий/подчиненный». Система 10 может быть использована с любым типом двигателя переменного тока.
Фиг.2 иллюстрирует различные варианты осуществления схемы 18 питания системы 10.
Схема 18 питания является характерной схемой 18 питания для каждого из приводов 14 переменной частоты. Схема 18 питания содержит выпрямитель 22 и инвертор 24, соединенный с выпрямителем 22. Выпрямитель 22 соединен с контроллером 12, а инвертор 24 соединен с обмоткой двигателя 20. В соответствии с различными вариантами осуществления инвертор 24 может содержать любое число коммутирующих устройств, таких как биполярные транзисторы с изолированным затвором, коммутационные тиристоры с интегральным затвором, полевые транзисторы на структуре металл-окисел-полупроводник (MOSFET) и т.д.
Фиг.3 иллюстрирует различные варианты осуществления контроллера 16 системы 10. Контроллер 16 является характерным для контроллеров 16 для каждого из приводов 14 переменной частоты. Контроллер 16 содержит модуль 26 снижения скорости и модуль 28 совместного использования потока. Контроллер 16 также содержит DQ-3Ф трансформатор 30, модулятор 32 ширины импульса и модель 34 двигателя. В соответствии с различными вариантами осуществления модель 34 двигателя структурирована и выполнена с возможностью определения оценки скорости двигателя и оценки потока двигателя на основе измерений статорного напряжения и статорного тока. Модель 34 двигателя может также предоставлять значения для компонента тока намагничивания, компонента тока крутящего момента и угла потока двигателя.
Фиг.4 иллюстрирует различные варианты осуществления модуля 26 снижения скорости системы 10. Модуль 26 снижения скорости является характерным для модулей 26 снижения скорости для каждого из приводов 14 переменной частоты. Модуль 26 снижения скорости структурирован и выполнен с возможностью регулирования компонента тока крутящего момента в связанном приводе 14 переменной частоты. Модуль 28 снижения скорости содержит блок 36 развертки скорости, блок 38 усиления снижения скорости, регулятор 40 скорости и регулятор 42 крутящего момента. При работе блок 36 развертки скорости получает потребную скорость от задающего контроллера 12 и линеаризует любые изменения в потребной скорости до скорости изменения, которая может быть отрегулирована пользователем. Блок 38 усиления снижения скорости масштабирует значение компонента тока крутящего момента, и масштабированное значение компонента тока крутящего момента вычитается из выходного сигнала блока 36 развертки скорости для формирования опорной скорости для регулятора 40 скорости. Таким образом, модуль 26 снижения скорости структурирован и выполнен с возможностью определения опорной скорости на основе значения компонента тока крутящего момента. Введение тока крутящего момента в опорную скорость способствует совместному использованию тока крутящего момента приводами 14 переменной частоты.
В соответствии с другими вариантами осуществления модуль 26 снижения скорости может быть структурирован и выполнен таким образом, что блок 38 усиления снижения скорости масштабирует опорный ток крутящего момента вместо значения компонента тока крутящего момента. В таких вариантах осуществления опорная скорость для регулятора 40 скорости формируется вычитанием масштабированного опорного тока крутящего момента из выходного сигнала блока 36 развертки скорости.
Если один из приводов 14 переменной частоты поставляет больше тока крутящего момента, чем другие приводы 14 переменной частоты, то модуль 26 снижения скорости действует для вычитания большего значения компонента тока крутящего момента из выходного сигнала блока 36 развертки скорости. Это действие приводит к тому, что привод 14 переменной частоты снижает свою выходную частоту на период времени до тех пор, пока фазовый сдвиг между его выходным напряжением и противоэлектродвижущей силой (противоэдс) двигателя 20 не снизится до желательного значения. Поскольку имеет место прямое соотношение между током крутящего момента и фазовым углом между выходным напряжением привода 14 переменной частоты и противоэдс двигателя 20, то уменьшенный фазовый угол приводит в результате к меньшему току крутящего момента, поставляемому приводом 14 переменной частоты. Другие приводы 14 переменной частоты, для которых имеется меньшее значение тока крутящего момента, вычтенное из соответствующих выходных сигналов их блоков 36 развертки скорости, могут увеличивать свою выходную частоту, что позволяет им поставлять больший ток крутящего момента, так что все из приводов 14 переменной частоты поставляют, по существу, ту же самую величину тока крутящего момента.
На фиг.5 показаны различные варианты осуществления модуля 28 совместного использования потока системы 10. Модуль 28 совместного использования потока является характерным для модулей 28 совместного использования потока каждого из приводов 14 переменной частоты. Модуль 28 совместного использования потока структурирован и выполнен с возможностью регулирования компонента тока намагничивания в связанном приводе 14 переменной частоты. Модуль 28 совместного использования потока содержит блок 44 развертки потока, блок 46 усиления снижения потока, регулятор 48 потока и регулятор 50 тока намагничивания. При работе блок 44 развертки потока получает потребный поток от задающего контроллера 12 и линеаризует любые изменения в потребном потоке до скорости изменения, которая может быть отрегулирована пользователем. Блок 46 усиления снижения потока масштабирует ошибку между средним значением компонента тока намагничивания, предоставляемым задающим контролером 12, и выходным сигналом регулятора 48 потока. Среднее значение компонента тока намагничивания определяется задающим контролером 12 на основе значения компонента тока намагничивания, предоставляемого каждыми из приводов 14 переменной частоты. Выходным сигналом регулятора 48 потока является опорный ток намагничивания. Масштабированная ошибка складывается с выходным сигналом блока 44 развертки потока для формирования опорного потока для регулятора 48 потока. Таким образом, модуль 28 совместного использования потока также структурирован и выполнен с возможностью определения опорного потока на основе значения компонента тока намагничивания. Введение погрешности тока намагничивания в опорный поток служит для того, чтобы приводы 14 переменной частоты работали с минимальной погрешностью в компонентах тока намагничивания, тем самым способствуя совместному использованию тока намагничивания приводами 14 переменной частоты.
Если один из приводов 14 переменной частоты поставляет ток намагничивания больший, чем среднее значение компонента тока намагничивания, предоставляемое задающим контролером 12, то модуль 28 совместного использования потока действует для суммирования масштабированной ошибки с выходным сигналом блока 44 развертки потока, эффективно снижая значение опорного потока. Снижение опорного потока вызывает то, что регулятор 48 потока снижает опорный ток намагничивания, что, в свою очередь, уменьшает ток намагничивания вследствие действия регулятора 50 тока намагничивания. Если один из приводов 14 переменной частоты поставляет ток намагничивания меньший, чем среднее значение компонента тока намагничивания, предоставляемое задающим контролером 12, то происходит противоположное. Таким образом, все приводы 14 переменной частоты могут управляться таким образом, чтобы поставлять, по существу, ту же самую величину тока намагничивания.
В соответствии с другими вариантами осуществления модуль 28 совместного использования потока может быть структурирован и выполнен таким образом, что блок 46 усиления снижения потока масштабирует погрешность между средним опорным током намагничивания, предоставляемым задающим контроллером 12, и выходным сигналом регулятора 48 потока. Средний опорный ток намагничивания может быть определен задающим контроллером 12 на основе соответствующего опорного тока намагничивания, предоставляемого каждым из приводов 14 переменной частоты. В таких вариантах осуществления опорный поток для регулятора 48 потока формируется суммированием масштабированной погрешности с выходным сигналом блока 44 развертки потока.
В соответствии с другими вариантами осуществления модуль 28 совместного использования потока может быть структурирован и выполнен таким образом, что выходной сигнал регулятора 48 потока используется в качестве опорного для тока источника возбуждения, когда двигатель 20 является синхронным двигателем. Рассогласование между средним током источника возбуждения и действительным током источника возбуждения может быть использовано для осуществления изменения в опорном сигнале потока. Для таких вариантов осуществления опорный ток намагничивания становится фиксированным значением, которое используется во всех приводах 14 переменной частоты. Фиксированное значение может быть, например, нулем или значением, которое равно выходному сигналу части пропорционального регулятора в регуляторе 48 потока.
Хотя выше для примера описаны различные варианты осуществления изобретения, специалистам в данной области техники должно быть понятно, что различные модификации, изменения и адаптации описанных вариантов осуществления могут быть реализованы без отклонения от сущности и объема изобретения, определенных формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система зарядки и способ управления зарядкой батареи электротранспортного средства | 2021 |
|
RU2797370C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ТРЕНАЖЕРНОЕ УСТРОЙСТВО, УСТАНОВКА И СПОСОБ | 2011 |
|
RU2578982C2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| СИСТЕМА ПРИВОДА ДВИГАТЕЛЯ С ПЕРЕМЕННЫМ МАГНИТНЫМ ПОТОКОМ | 2007 |
|
RU2397600C1 |
| СПОСОБ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2716055C2 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| СИСТЕМА УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ УПРАВЛЕНИЯ СГОРАНИЕМ В ДВИГАТЕЛЯХ | 2009 |
|
RU2529983C2 |
| Способ активного гашения магнитного шума электродвигателя и устройство для его осуществления | 2021 |
|
RU2769972C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩАЮЩИМИСЯ ЭЛЕКТРИЧЕСКИМИ МАШИНАМИ | 2015 |
|
RU2689075C2 |



Изобретение относится к области электротехники и может быть использовано для параллельного управления приводами переменной частоты. В способе управления для каждого привода переменной частоты осуществляют передачу значения компонента тока намагничивания на задающий контроллер и прием потребной скорости, потребного потока и усредненного значения компонента тока намагничивания от задающего контроллера. В способе управления осуществляют определение скорости двигателя и потока двигателя на основе измерений статорного напряжения и тока двигателя, связанного с приводом переменной частоты, определение опорного значения скорости на основе значения компонента тока крутящего момента и определение опорного значения потока на основе значения компонента тока намагничивания и усредненного значения компонента тока намагничивания. В способе управления дополнительно регулируют компонент тока крутящего момента на основе опорного значения скорости и/или регулируют компонент тока намагничивания на основе опорного значения потока. 2 н. и 18 з.п. ф-лы, 5 ил.
1. Система для управления, по меньшей мере, двумя приводами переменной частоты, соединенными параллельно, причем система содержит задающий контроллер и, по меньшей мере, два независимых привода переменной частоты, осуществляющие связь с задающим контроллером, причем каждый привод переменной частоты содержит схему питания и контроллер, осуществляющий связь со схемой питания, при этом контроллер содержит модуль снижения скорости, который структурирован и конфигурирован для регулирования компонента тока крутящего момента в приводе переменной частоты, и модуль совместного использования потока, который структурирован и конфигурирован для регулирования компонента тока намагничивания в приводе переменной частоты.
2. Система по п.1, в которой задающий контроллер структурирован и конфигурирован с возможностью осуществления связи с каждым приводом переменной частоты со скоростью передачи данных, которая существенно ниже, чем любая скорость вычислений в приводах переменной частоты.
3. Система по п.1, в которой задающий контроллер содержит программируемый логический контроллер.
4. Система по п.1, в которой каждая схема питания содержит выпрямитель и инвертор, соединенный с выпрямителем.
5. Система по п.4, в которой инвертор содержит, по меньшей мере, одно из следующих устройств: биполярный транзистор с изолированным затвором, коммутационный тиристор с интегральным затвором и полевой транзистор на структуре металл-окисел-полупроводник (MOSFET).
6. Система по п.1, в которой модуль снижения скорости структурирован и конфигурирован для определения опорного сигнала скорости на основе компонента тока крутящего момента.
7. Система по п.1, в которой модуль снижения потока структурирован и конфигурирован для определения опорного сигнала потока на основе компонента тока намагничивания.
8. Система по п.1, в которой компонент тока крутящего момента, по существу, равен компоненту тока крутящего момента в другом приводе переменной частоты системы.
9. Система по п.1, в которой компонент тока намагничивания, по существу, равен компоненту тока намагничивания в другом приводе переменной частоты системы.
10. Система по п.1, в которой каждый контроллер дополнительно содержит модуль модели двигателя, который структурирован и конфигурирован для определения оценки скорости двигателя и оценки потока двигателя на основе измерений статорного напряжения и статорного тока.
11. Система по п.1, в которой каждый привод переменной частоты дополнительно содержит источник возбуждения, связанный с контроллером.
12. Способ управления, по меньшей мере, двумя приводами переменной частоты, соединенными параллельно, причем способ включает в себя для каждого привода переменной частоты передачу значения компонента тока намагничивания на задающий контроллер; прием потребной скорости, потребного потока и среднего значения компонента тока намагничивания от задающего контроллера; определение скорости двигателя и потока двигателя на основе измерений статорного напряжения и тока двигателя, связанного с приводом переменной частоты; определение опорного значения скорости на основе значения компонента тока крутящего момента; определение опорного значения потока на основе значения компонента тока намагничивания и среднего значения компонента тока намагничивания и регулирование, по меньшей мере, одного из следующего: компонента тока крутящего момента на основе опорного значения скорости и регулирование компонента тока намагничивания на основе опорного значения потока.
13. Способ по п.12, в котором передача значения компонента тока намагничивания включает в себя передачу значения компонента тока намагничивания со скоростью передачи данных, которая существенно меньше, чем любая скорость вычислений в приводах переменной частоты.
14. Способ по п.12, в котором прием потребной скорости, потребного потока и среднего значения компонента тока намагничивания включает в себя прием потребной скорости, потребного потока и среднего значения компонента тока намагничивания со скоростью передачи данных, которая существенно меньше, чем любая скорость вычислений в приводах переменной частоты.
15. Способ по п.12, в котором определение опорного значения скорости включает в себя масштабирование значения компонента тока крутящего момента и вычитание масштабированного значения компонента тока крутящего момента из выходного сигнала блока развертки скорости.
16. Способ по п.12, в котором определение опорного значения потока включает в себя определение разности между значением компонента тока намагничивания и средним значением компонента тока намагничивания;
масштабирование разности и суммирование масштабированного значения с выходным сигналом блока развертки потока.
17. Способ по п.12, в котором регулирование компонента тока крутящего момента включает в себя регулирование фазового сдвига между выходным напряжением привода переменной частоты и противоэдс двигателя, соединенного с ним.
18. Способ по п.17, в котором регулирование фазового сдвига включает в себя регулирование выходной частоты привода переменной частоты.
19. Способ по п.12, в котором регулирование компонента тока крутящего момента включает в себя регулирование компонента тока крутящего момента в другом приводе переменной частоты, соединенном параллельно.
20. Способ по п.12, в котором регулирование компонента тока намагничивания включает в себя регулирование компонента тока намагничивания так, чтобы он был, по существу, равен компоненту тока намагничивания в другом приводе переменной частоты, соединенном параллельно.
| ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1995 |
|
RU2094938C1 |
| GB 1443636 A1, 21.07.1976 | |||
| US 5460244 A, 24.10.1995 | |||
| JP 7274517 A, 20.10.1995 | |||
| САМОСВАЛЬНАЯ ПЛАТФОРМА | 0 |
|
SU266598A1 |

