Изобретение относится к навигации и может быть использовано для автоматического управления движением дорожно-строительной машины (ДСМ).
Оптические устройства дистанционного определения ориентации подвижных объектов содержат размещаемые на подвижном объекте реперные источники излучения (РИ) и оптико-локационные блоки (ОЛБ), размещаемые на базовом (неподвижном) основании, относительно которого производится определение ориентации подвижного объекта.
Оптико-локационные блоки определяют направления на отдельные РИ (углы-пеленги РИ), используя которые определяют ориентацию подвижных объектов. В ОЛБ широко используются двумерные анализаторы плоских изображений, например, на основе матричных фотодетекторов в сочетании с дальномерным устройством [1]. В классической стереоскопической схеме построения устройств определения ориентации подвижных объектов измеряют углы-пеленги РИ с двух точек, разнесенных на известное расстояние, затем определяют координаты РИ и ориентацию подвижного объекта.
Известен способ [2] локации источников излучения, описанный в патенте на изобретение GB №2002986 A, опубл. 28.02.1979., размещаемых на подвижных объектах, в котором предусматривается использование двух цилиндрических объективов-анаморфотов для формирования изображений РИ в плоскости линейки фотодетекторов. Определив координату изображения РИ и зная фокусное расстояние цилиндрического объектива, определяют угол-пеленг РИ. Используя полученные данные, зная расстояние между формирователями изображения (точками, относительно которых производятся отсчеты углов-пеленгов), вычисляют координаты РИ.
Измерение ориентации подвижного объекта производится в три этапа:
определение углов-пеленгов;
вычисление координат РИ;
вычисление ориентации подвижного объекта с использованием полученных значений координат РИ.
Недостатком такого способа является размещение ОЛБ на неподвижном основании (что соответствует размещению на земле применительно к задаче определения положения ДСМ относительно автотрассы), а также недостаточная информативность, связанная с измерением только угловых координат подвижного объекта.
Известен способ [3] определения местоположения и углов ориентации летательного аппарата (ЛА) относительно взлетно-посадочной полосы (ВПП), описанный в патенте на изобретение РФ №2378664, опубл. 10.01.2010., основанный на формировании области излучения посадочной траектории, приеме сигналов от источников излучения и определении местоположения ЛА относительно ВПП, в качестве источников излучения используют два одинаковых лазерных маяка, регистрируют излучение каждого из двух лазерных маяков с известными координатами, установленных вдоль ВПП на полосах безопасности, посредством двух разнесенных оптико-локационных блоков, установленных на борту ЛА и выполненных каждый в виде плоской фотоматрицы, размещенной в фокальной плоскости фотообъектива, осуществляют обработку оцифрованного изображения, снимаемого с фотоматрицы для определения координат изображений лазерных маяков, вычисляют координаты двух лазерных маяков относительно ЛА.
Недостатками этого способа являются:
низкая точность измерения вертикальной координаты и угла тангажа ЛА (при поперечном размещении маяков относительно оси ВПП) либо низкая точность измерения угла крена (при осевом расположении маяков), что обусловлено применением двух маяков.
Технической задачей изобретения является повышение точности измерения местоположения ДСМ относительно профиля автотрассы. Технический результат при использовании заявляемого изобретения заключается в повышении точности и информативности определения местоположения ДСМ относительно профиля автотрассы и углов его ориентации, достигаемые за счет использования высокоточных измерителей первичной навигационной информации (фоточувствительные матрицы (ФМ) цифровых фотокамер) и вычислителя, алгоритм которого не содержит упрощений, приводящих к методическим погрешностям измерений.
Единый технический результат изобретения достигается тем, что в способе определения местоположения и углов ориентации ДСМ относительно профиля автотрассы, основанном на приеме сигналов от источников излучения и определении местоположения ДСМ относительно профиля автотрассы, в качестве источников излучения используют три лазерных маяка, регистрируют излучение каждого из трех лазерных маяков с известными координатами, установленных вдоль профиля автотрассы, посредством двух разнесенных цифровых фотокамер, установленных на раме ДСМ и выполненных в виде фоточувствительных матриц (ФМ), размещенных в фокальной плоскости фотообъектива, осуществляют обработку оцифрованного изображения, снимаемого с фоточувствительных матриц для определения координат изображений лазерных маяков, вычисляют координаты трех лазерных маяков относительно ДСМ,
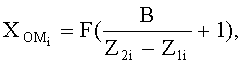
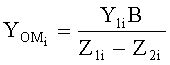
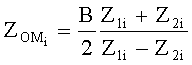
где Y1i, Z1i, Y2i, Z2i - координаты изображений S1i, S2i лазерных маяков Mi на фоточувствительной матрице, первый индекс обозначает номер фоточувствительной матрицы, второй индекс i=1…3 - номер лазерного маяка, B - расстояние между центрами фоточувствительных матриц, F - фокусное расстояние фотообъективов,
вычисляют матрицу
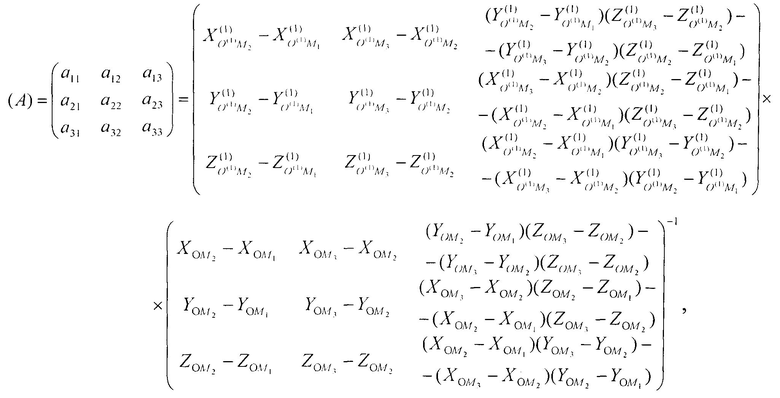
где 








вычисляют углы ψ, υ, γ ориентации дорожно-строительной машины относительно автотрассы
ψ=-arctg(α13/α11),
υ=arcsinα12,
γ=-arctg(α32/α22),
вычисляют координаты 



Существенными отличительными признаками от прототипа является следующая совокупность действий:
определение координат изображений трех лазерных маяков на фоточувствительных матрицах;
вычисление координат трех лазерных маяков в системе координат, связанной с ДСМ;
вычисление значений углов ориентации ДСМ относительно автотрассы; вычисление координат ДСМ относительно автотрассы. На фиг.1 показана схема измерения положения ДСМ относительно автотрассы.
Способ реализуется следующим образом. Пусть горизонтальная система координат O(1)X(1)Y(1)Z(1) связана с профилем автотрассы (фиг.1), точка O(1) совпадает с направлением движения ДСМ, ось O(1)X(1) - с осью автотрассы, ось O(1)Y(1) - нормаль к поверхности профиля автотрассы. В окрестности профиля автотрассы установлено три одинаковых лазерных маяка M1, M2 и M3, координаты которых 








Система координат OXYZ связана с системой технического зрения (СТЗ), которая, в свою очередь, установлена на ДСМ, точка O совпадает с центром отрезка, соединяющего геометрические центры ФМ, ось OX (продольная ось ДСМ) направлена параллельно оптическим осям фотообъективов, а ось OZ (поперечная ось ДСМ) совпадает с линией, проходящей через геометрические центры ФМ, ось OY добавляет другие оси до правой системы координат. Известны расстояние B между центрами ФМ и фокусные расстояния фотообъективов F1=F2=F.
Работа бортовой системы технического зрения сводится к определению координат маяков в системе координат OXYZ, которые вычисляются следующим образом:

где Y1i, Z1i, Y2i, Z2i - координаты изображений S1i, S2i лазерных маяков Mi на фоточувствительной матрице, первый индекс обозначает номер фоточувствительной матрицы, второй индекс i=1…3 - номер лазерного маяка.
Рассмотрим очевидное векторное равенство

Перепишем это равенство в матричной форме в проекциях на оси системы координат O(1)X(1)Y(1)Z(1).

где вектор 

Применим соотношение (2) для трех маяков



Совокупность трех последних векторных равенств представляет собой систему 9 нелинейных алгебраических уравнений относительно шести неизвестных 
Вычитая из второго соотношения первое, а из третьего второе, получим
Запишем также соотношение, описывающее преобразование координат вектора равного векторному произведению этих векторов
Три последних соотношения используем для записи матричного соотношения, в котором матрицы-столбцы занимают место столбцов в блочных матрицах, такая запись следует из правила умножения матриц
Из последнего матричного равенства выразим искомую матрицу (а) путем умножения справа обеих частей равенства на матрицу обратную сомножителю матрицы (а). Отметим, что определитель этой матрицы не равен нулю, поскольку три вектора, координаты которых записаны в столбцах матрицы, являются линейно независимыми и, следовательно, обратная матрица существует.
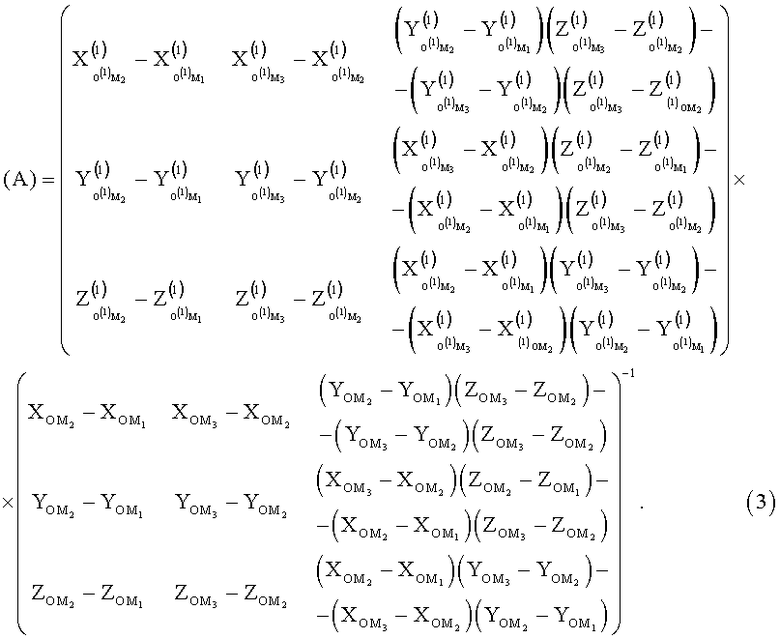
Поскольку векторы 


Последнее выражение дает возможность вычислить углы поворота относительно вертикальной, поперечной и продольной оси



где αnm - коэффициенты матрицы (a) (n, m=1…3 номера строк и столбцов).
Таким образом, задача об определении координат ДСМ 


Источники информации:
1. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - с.168.
2. Патент на изобретение GB №2002986 A, опубл. 28.02.1979. (аналог).
3. Патент РФ на изобретение №2378664, опубл. 10.01.2010. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2014 |
|
RU2548366C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПУНКТИРНОЙ ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2013 |
|
RU2530476C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2010 |
|
RU2422772C1 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ПОВОРОТЕ | 2009 |
|
RU2407032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ САМОЛЕТА-ЗАПРАВЩИКА И КОНУСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402035C1 |
Изобретение относится к определению местоположения с использованием нескольких разнесенных источников излучения. Достигаемый технический результат - автоматизация процесса, повышение точности измерения. Указанный результат достигается за счет того, что по сигналам трех лазерных маяков, установленных вдоль профиля строящейся автотрассы, посредством двух разнесенных цифровых фотокамер, установленных на раме дорожно-строительной машины и выполненных в виде фоточувствительных матриц, размещенных в фокальной плоскости фотообъектива, осуществляют обработку оцифрованного изображения, снимаемого с фоточувствительных матриц для определения координат изображений лазерных маяков, вычисляют координаты трех лазерных маяков относительно дорожно-строительной машины, а затем определяют положение дорожно-строительной машины относительно автотрассы. 1 ил.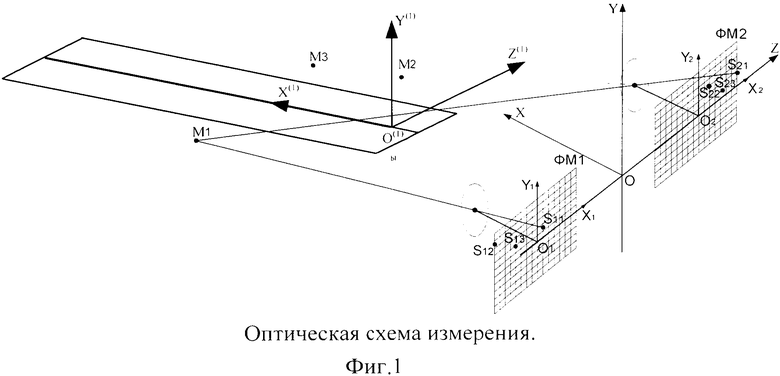
Способ измерения положения дорожно-строительной машины, основанный на использовании в качестве источников излучения двух одинаковых лазерных маяков, регистрации излучения каждого из двух лазерных маяков с известными координатами посредством двух разнесенных оптико-локационных блоков и вычислении координат положения, отличающийся тем, что в качестве источников излучения используют три лазерных маяка, регистрируют излучение каждого из трех лазерных маяков с известными координатами, установленных вдоль профиля автотрассы, посредством двух разнесенных цифровых фотокамер, установленных на дорожно-строительной машине и выполненных каждая в виде фоточувствительной матрицы, размещенной в фокальной плоскости фотообъектива, осуществляют обработку оцифрованного изображения, снимаемого с фоточувствительных матриц для определения координат изображений лазерных маяков в системе координат OXYZ,

где Y1i, Z1i, Y2i, Z2i - координаты изображений S1i, S2i лазерных маяков Mi на фоточувствительной матрице, первый индекс обозначает номер фоточувствительной матрицы, второй индекс i=1…3 - номер лазерного маяка, B - расстояние между центрами фоточувствительных матриц, F - фокусное расстояние фотообъективов,
вычисляют матрицу
где 



вычисляют координаты

| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ С ПОМОЩЬЮ СПУТНИКОВЫХ СИСТЕМ НАВИГАЦИИ GPS/ГЛОНАСС ИЛИ СВЕТОВЫХ, НАПРИМЕР ЛАЗЕРНЫХ, ИЗЛУЧАТЕЛЕЙ | 2011 |
|
RU2465410C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ МОНИТОРИНГА УЛИЧНО-ДОРОЖНОЙ СЕТИ ПОСРЕДСТВОМ ПЕРЕДВИЖНОЙ ДОРОЖНОЙ ЛАБОРАТОРИИ И СРЕДСТВО ЛОКАЛЬНОЙ ПОДСВЕТКИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2372442C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МИКРОКАНАЛЬНОЙ ПЛАСТИНЫ | 2000 |
|
RU2187166C2 |
| US 20070255494 A1, 01.11.2007 | |||
| WO 2006135916 A1, 21.12.2006 | |||

