Изобретение относится к навигации, а именно к системам определения положения объекта без использования отражения или вторичного излучения, и может быть использовано для расширения возможностей систем круизконтроля и предупреждения водителей транспортных средств о нарушении режима движения в пределах своей полосы.
Известны оптические устройства дистанционного измерения координат подвижных объектов, содержащие размещаемые на транспортном средстве оптико-локационные блоки (ОЛБ). Оптико-локационные блоки определяют направления на отдельные подвижные объекты, используя которые определяют координаты подвижных объектов. В ОЛБ широко используют двумерные анализаторы плоских изображений, например, на основе матричных фотодетекторов в сочетании с дальномерным устройством [1].
Известен способ определения положения контролируемого объекта или отдельных его точек в трехмерном пространстве [1], относящийся к системам технического зрения (СТЗ). Способ основан на трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (X, Y, Z) и пересекаются в ее начале (фиг.1).
Используя, например, два ОЛБ с системами отсчета координат внутри каждого, можно определить координаты точки А путем решения следующей системы уравнений:



 ,
,
где αxj - угловая координата точки А, отсчитанная от оси х в j-м ОЛБ; αyj - угловая координата точки А, отсчитанная от оси у в j-м ОЛБ; dj - расстояние до начала координат от передней узловой точки фотообъектива j-го ОЛБ.
Известен наиболее близкий по технической сущности к изобретению способ, описанный в [1, 2], относящийся к системам дистанционного определения координат подвижных объектов - системам технического зрения. Способ определения положения контролируемого объекта или отдельных его точек в трехмерном пространстве основан на использовании стереоскопической схемы геометрического типа, состоящей из двух одинаковых фотообъективов 01 и 02 с параллельными оптическими осями, разнесенных на известное расстояние, и двух матричных фотодетекторов, где каждый фотообъектив и матричный фотодетектор представляют собой ОЛБ. Главные точки объективов расположены на одной линии (линии базы), перпендикулярной к оптическим осям (фиг.2). Если выбрать начало координат О в середине линии базы длиной В, то, измеряя координаты изображений x1 и x2 произвольной точки А и их разность р=х1-х2, называемую линейным параллаксом, можно определить координату  точки А. Две другие координаты определяются в соответствии с выражениями
точки А. Две другие координаты определяются в соответствии с выражениями
 ;
; 
где y=y1-y2 - координата изображений точки по оси Y, перпендикулярной к плоскости чертежа; Z - ось системы координат, направленная от середины базы О к плоскости предметов.
Недостатком описанных аналога и прототипа является невозможность измерения координат транспортных средств относительно оптически контрастных элементов конструкции автодороги, например линий дорожной разметки или светоотражающих фрагментов на ограждениях автодорог.
Возможность измерения координат транспортного средства относительно линий дорожной разметки открывает перспективу его автоматического управления по курсу вдоль линий дорожной разметки, что является важным расширением функций существующих систем круизконтроля, которые обеспечивают режим стабилизации скорости на свободной полосе движения, а также соблюдение безопасной дистанции при наличии помехи впереди.
Технической задачей изобретения является определение бокового отклонения транспортного средства от линии дорожной разметки. Технический результат при использовании заявляемого изобретения заключается в определении расстояния от линии дорожной разметки до транспортного средства и угла отклонения продольной оси транспортного средства относительно линии дорожной разметки посредством одного оптико-локационного блока, достигаемые за счет использования высокоточного измерителя первичной навигационной информации - оптико-локационного блока и вычислителя.
Технический результат изобретения достигается тем, что в способе определения положения транспортного средства относительно линии дорожной разметки, основанном на трехмерной локации точки с помощью оптико-локационного блока, измеряют расстояния от линии дорожной разметки до транспортного средства и угол отклонения продольной оси транспортного средства относительно линии дорожной разметки, для этого осуществляют обработку оцифрованных изображений поверхности автодороги, выбирают в поле изображения в одноименных вершинах штриховой линии дорожной разметки две идентичные точки R1, R2, ближайшие к транспортному средству, определяют координаты этих точек на фоточувствительных матрицах (Yυ,Zυ), м, где υ=1, 2 номер точки R1, R2 соответственно, вычисляют боковое отклонение от пунктирной линии дорожной разметки
 ,
,
где F - фокусное расстояние фотообъектива, h - высота расположения ОЛБ от дорожного полотна, α - угол наклона оптической оси ОЛБ от продольной оси транспортного средства вокруг его поперечной оси, вычисляют угол между продольной осью транспортного средства и линией дорожной разметки

Существенными отличительными признаками от прототипа является следующая совокупность действий:
выбор в поле изображения двух идентичных точек в одноименных вершинах штриховых линий дорожной разметки, ближайших к транспортному средству (фиг.3);
вычисление бокового отклонения транспортного средства от линии дорожной разметки автодороги;
вычисление угла между продольной осью транспортного средства и линией дорожной разметки автодороги.
На фиг.1 приведена схема трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (аналог).
На фиг.2 изображена стереоскопическая схема геометрического типа (прототип).
На фиг.3 изображены пунктирные линии дорожной разметки, идентичные точки R1, R2 и системы координат OXYZ и О′X′Y′Z′, связанные с транспортным средством.
Способ осуществляется следующим образом.
Транспортное средство имеет один оптико-локационный блок, связанный с вычислителем, который по изображениям, поступающим с фоточувствительной матрицы, решает задачу определения координат точек фотографируемого ландшафта дороги.
В поле изображения дорожного полотна выбирают две разнесенные идентичные точки R1, R2, лежащие на линии дорожной разметки (фиг.3).
Выбор точек в поле изображения может осуществляться, например, по контурам штриховых линий дорожной разметки методом оконтуривания /1/. Эти идентичные точки должны быть выбраны в одноименных вершинах штриховых линий дорожной разметки, ближайших к транспортному средству.
Ось ОХ′ совпадает с продольной осью транспортного средства, OZ′× - поперечная ось. Оптическая ось оптиколокационного блока ось ОХ развернута вокруг поперечной оси на угол α, как показано на фиг.3.
Рассмотрим процесс измерения положения транспортного средства относительно пунктирной линии дорожной разметки посредством одного ОЛБ.
Пусть ОЛБ расположен на высоте h=LR4 от дорожного полотна. Принимаем, что вертикальная ось транспортного средства OY′ совпадает с перпендикуляром к поверхности автодороги. Известным считаем также фокусное расстояние фотообъектива OL=F.
Изображения точек строим в соответствии с законами геометрической оптики путем пересечения прямых линий R1S1, R2S2, проходящих через оптический центр L фотообъектива, с плоскостью OYZ фоточувствительной матрицы.
Программная обработка оцифрованных изображений поверхности автодороги позволяет определить координаты этих точек на фоточувствительной матрице (yυ,zυ), м, где υ=1, 2 номер точки R1, R2 соответственно. Выбор точек в поле изображения может осуществляться, например, по контурам пунктирных линий дорожной разметки методом оконтуривания /1/. Эти идентичные точки выбирают в одноименных вершинах пунктирных линий дорожной разметки, ближайших к транспортному средству.
Запишем соотношения, связывающие измеряемые координаты Y1, Z1, Y2, Z2 изображений S1, S2 идентичных точек R1, R2 соответственно. Для этого запишем вектор нормали к плоскости S1LS2.

где  ,
,  ,
,  - единичные орты системы координат OXYZ.
- единичные орты системы координат OXYZ.
Выразим этот вектор в системе координат OX′Y′Z′, связанной с транспортным средством, для этого умножим его на матрицу поворота, учитывающую вращение на угол α вокруг оси OZ

Выразим единичный вектор  нормальный плоскости S1LS2, для этого разделим компоненты вектора
нормальный плоскости S1LS2, для этого разделим компоненты вектора  на его длину
на его длину 
 ,
,
где

Поскольку вектор совпадает с высотой треугольника LR3R4, то для нахождения бокового отклонения транспортного средства R3R4 от пунктирной линии дорожной разметки R1R3, выразим косинус угла β между и отрезком LR4, параллельным оси OY′, как скалярное произведение единичных векторов и  (единичный орт оси OY′)
(единичный орт оси OY′)

где угол ∠λ=∠R4LR5=90-∠β.
Из треугольника LR3R4 следует, что
 ,
,
где
 .
.
С учетом последнего равенства

Боковое отклонение транспортного средства от линии дорожной разметки ZБ является важным параметром, который может быть использован для автоматического управления транспортным средством по курсу. Однако не менее полезно знать угол φ, между продольной осью транспортного средства и линией дорожной разметки.
Векторное произведение векторов  и (0, j′, 0) позволяет получить вектор
и (0, j′, 0) позволяет получить вектор  , параллельный линии дорожной разметки R1R3
, параллельный линии дорожной разметки R1R3

Нормируем этот вектор, разделив его компоненты на его модуль, получим
 ,
,
где
 .
.
Скалярное произведение единичных векторов  и (i′, 0, 0) позволяет выразить косинус искомого угла
и (i′, 0, 0) позволяет выразить косинус искомого угла
 ,
,
или
 .
.
Источники информации
1. Техническое зрение роботов. /Под общ. ред. Ю.Г.Якушенкова.- М.: Машиностроение, 1990. - c.168-176.
2. Патент РФ на изобретение №2275652, кл. G01S 5/16, опубл. 10.06.2006, (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПУНКТИРНОЙ ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2013 |
|
RU2530476C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ АВТОДОРОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402037C1 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ПОВОРОТЕ | 2009 |
|
RU2407032C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2401436C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНЫХ СРЕДСТВ НА ПЕРЕКРЕСТКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480842C1 |


Способ заключается в трехмерной локации точки с помощью оптико-локационных блоков. Измеряют расстояния от линии дорожной разметки до транспортного средства и угол отклонения продольной оси транспортного средства относительно линии дорожной разметки посредством одного оптико-локационного блока. Осуществляют обработку оцифрованных изображений поверхности автодороги. Выбирают в поле изображения в одноименных вершинах штриховой линии дорожной разметки две идентичные точки R1, R2, ближайшие к транспортному средству. Определяют координаты этих точек на фоточувствительных матрицах (Yυ,Zυ), м, где υ=1, 2 номер точки R1, R2 соответственно. Вычисляют боковое отклонение от пунктирной линии дорожной разметки и угол между продольной осью транспортного средства и линией дорожной разметки. Технический результат - определение расстояния от линии дорожной разметки до транспортного средства и угла отклонения продольной оси транспортного средства относительно линии дорожной разметки посредством одного оптико-локационного блока. 3 ил.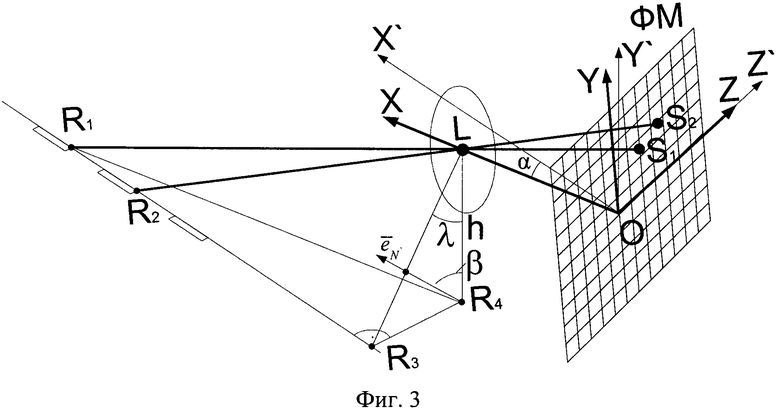
Способ определения положения транспортного средства относительно линии дорожной разметки, заключающийся в трехмерной локации точки с помощью оптико-локационных блоков, отличающийся тем, что измеряют расстояния от линии дорожной разметки до транспортного средства и угол отклонения продольной оси транспортного средства относительно линии дорожной разметки посредством одного оптико-локационного блока, для этого осуществляют обработку оцифрованных изображений поверхности автодороги, выбирают в поле изображения в одноименных вершинах штриховой линии дорожной разметки две идентичные точки R1, R2, ближайшие к транспортному средству, определяют координаты этих точек на фоточувствительных матрицах (Yυ,Zυ), м, где υ=1, 2 номер точки R1, R2 соответственно, вычисляют боковое отклонение от пунктирной линии дорожной разметки
 ,
,
где F - фокусное расстояние фотообъектива, h - высота расположения ОЛБ от дорожного полотна, α - угол наклона оптической оси ОЛБ от продольной оси транспортного средства вокруг его поперечной оси, вычисляют угол между продольной осью транспортного средства и линией дорожной разметки
 .
.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| RU 2008110814 A, 27.09.2009 | |||
| Устройство корреляционного зрения робота | 1990 |
|
SU1770120A1 |

