Изобретение относится к навигации, а именно к системам определения положения объекта без использования отражения или вторичного излучения, и может быть использовано для коррекции инерциальных навигационных систем летательных аппаратов, систем прицеливания и предупреждения столкновений.
Оптические устройства дистанционного измерения координат подвижных относительно летательного аппарата (ЛА) объектов содержат размещаемые на ЛА оптико-локационные блоки (ОЛБ). Оптико-локационные блоки определяют направления на отдельные подвижные объекты, используя которые определяют координаты подвижных объектов. В ОЛБ широко используются двумерные анализаторы плоских изображений, например, на основе матричных фотодетекторов в сочетании с дальномерным устройством [1].
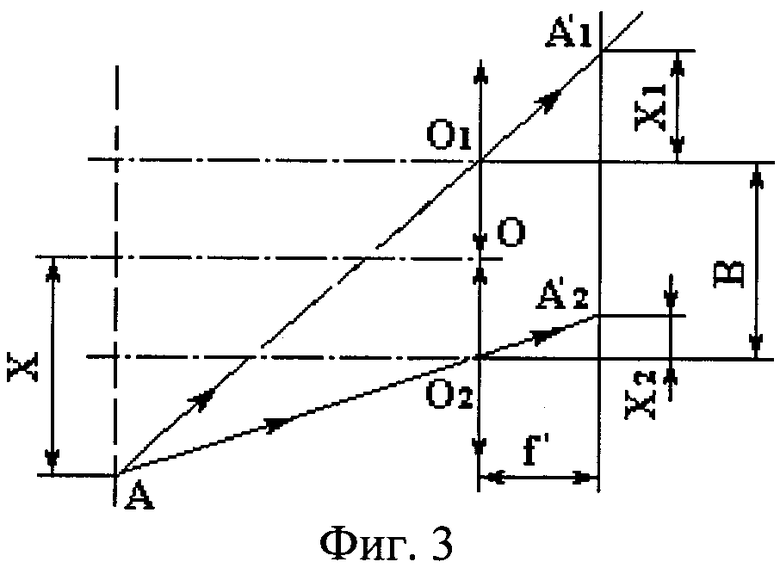
Известен способ определения положения контролируемого объекта или отдельных его точек в трехмерном пространстве, основанный на стереоскопической схеме геометрического типа, состоящей из двух одинаковых фотообъективов 01 и 02 с параллельными оптическими осями, разнесенных на известное расстояние. Главные точки фотообъективов (см. ГОСТ 7427-76) расположены на одной линии (линии базы), перпендикулярной к оптическим осям (фиг.3). Если выбрать начало координат О в середине линии базы длиной В, то, измеряя координаты изображений x1 и x2 произвольной точки А и их разность p=х1-х2, называемую линейным параллаксом, можно определить координату  точки А. Две другие координаты на фиг.4 не показаны, определяются в соответствии с выражениями
точки А. Две другие координаты на фиг.4 не показаны, определяются в соответствии с выражениями
 ;
;  ,
,
где у=у1-у2 - координата изображений точки по оси Y, перпендикулярной к плоскости чертежа; Z - ось системы координат, направленная от середины базы О к плоскости предметов.
Недостатком описанного аналога является необходимость прецизионной механической юстировки системы, состоящей в установке оптических осей ОЛБ на летательном аппарате, что требует наличия специальных высокоточных измерительных средств.
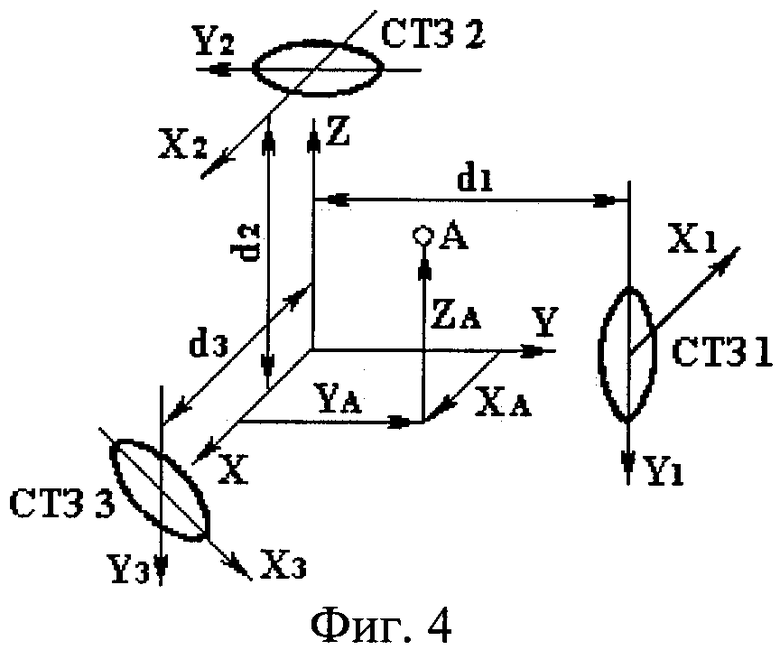
Известны наиболее близкие к заявляемому изобретению способ и устройство, описанные в [1] и относящиеся к системам дистанционного определения координат подвижных объектов - системам технического зрения (СТЗ). Способ основан на трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (X, Y, Z) и пересекаются в ее начале (фиг.4).
Используя, например, два ОЛБ с системами отсчета координат внутри каждого, можно определить координаты точки А путем решения следующей системы уравнений [1]:



 ,
,
где αxj - угловая координата точки А, отсчитанная от оси х в j-м ОЛБ; αyj - угловая координата точки А, отсчитанная от оси у в j-м ОЛБ; dj - расстояние до начала координат от передней узловой точки фотообъектива j-го ОЛБ.
Недостатком описанного прототипа является необходимость прецизионной механической юстировки системы, состоящей в установке оптических осей ОЛБ на летательном аппарате, что требует наличия специальных высокоточных измерительных средств.
Технической задачей изобретения является замена механической юстировки с применением специальных измерительных средств на юстировку алгоритмическую, не требующую продолжительных измерительных процедур.
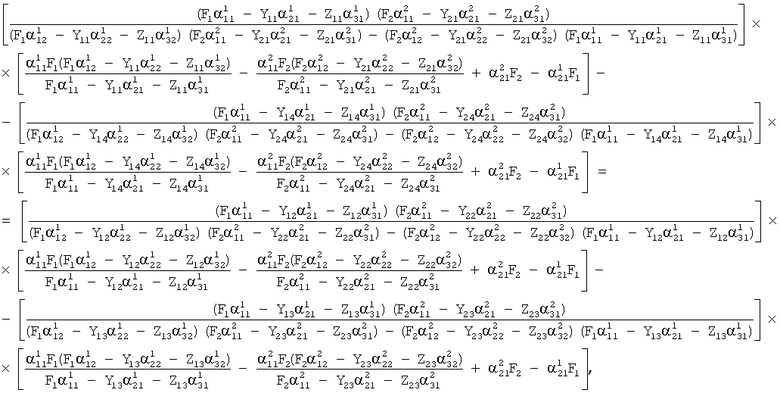
Сущность изобретения состоит в том, что в способе измерения координат объекта, основанном на трехмерной локации точки с помощью оптико-локационных блоков, перед измерением при проведении юстировки регистрируют изображения юстировочного шаблона посредством двух оптико-локационных блоков, осуществляют программную обработку оцифрованных изображений, снимаемых с фотоматриц, при этом определяют координаты Y1i, Z1i, Y2i, Z2i, где i=1…4, четырех вершин юстировочного шаблона, устанавленного в поле зрения оптико-локационных блоков, по которым вычисляют матрицы A1 и А2, путем решения системы шести уравнений относительно углов ψ1, υ1, γ1 и ψ2, υ2, γ2,

 - коэффициенты матриц направляющих косинусов A1 и А2, описывающих положения оптических осей первого и второго оптико-локационных блоков,
- коэффициенты матриц направляющих косинусов A1 и А2, описывающих положения оптических осей первого и второго оптико-локационных блоков,
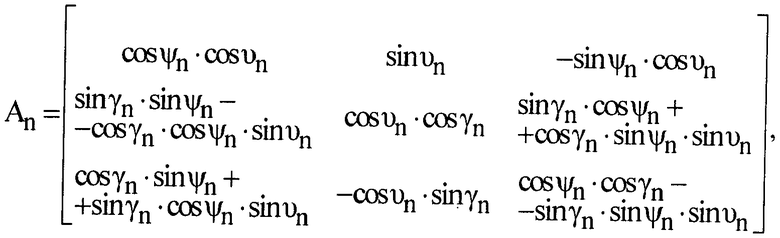
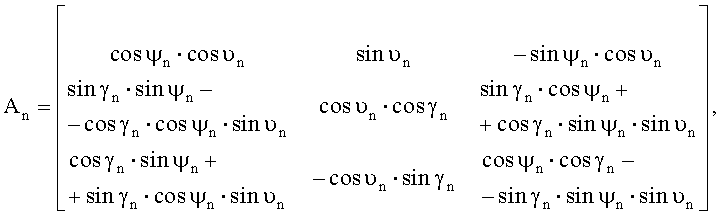
где n=1…2, j=1…3 - номер строки, k=1…3 - номер столбца, ψn, υn, γn - произвольные углы поворота n-й фотоматрицы в последовательности - Оnуn, Onzn соответственно (n=1, 2),
при измерениях осуществляют программную обработку оцифрованных изображений объекта, снимаемых с фотоматриц, определяют координаты Y1и, Z1и, Y2и, Z2и идентичной точки объекта, вычисляют координаты объекта в связанной системе координат
Заявляемый способ осуществляется при помощи устройства для измерения координат объекта, включающего два разнесенных оптико-локационных блока, каждый из которых содержит фотообъектив и чувствительную фотоматрицу, оптические оси которых направлены вдоль осей ортогональной системы координат и пересекаются в ее начале, дополнительно содержащего два оптико-локационных блока, имеющих параллельные оптические оси, цифровой вычислитель, включающий модуль программной обработки изображений юстировочного шаблона, модуль вычисления матриц A1 и А2, модуль программной обработки изображений объекта, модуль вычисления координат объекта, при этом модуль программной обработки изображений юстировочного шаблона, в котором определяют координаты изображений четырех вершин юстировочного шаблона на фотоматрицах, своим первым и вторым входами связан с фотоматрицей первого и фотоматрицей второго оптико-локационных блоков, на которых при юстировке с помощью фотообъектива первого и второго оптико-локационных блоков формируются изображения юстировочного шаблона, а своим выходом связан с входом модуля вычисления матриц A1 и А2, модуль программной обработки изображений объекта, в котором при измерении определяют координаты изображений идентичной точки объекта на фотоматрицах, своим первым и вторым входами связан с фотоматрицей первого и фотоматрицей второго оптико-локационных блоков, на которых с помощью фотообъектива первого и второго оптико-локационных блоков формируются изображения объекта, а своим выходом связан с первым входом модуля вычисления координат объекта - X, Y, Z, вторым входом связанного с выходом модуля вычисления матриц A1 и А2.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
программная обработка изображений, снимаемых с фотоматриц при юстировке;
вычисление матриц A1 и А2;
определение координат изображений идентичной точки объекта на первой и второй фоточувствительных матрицах при измерении,
вычисление координат объекта.
По устройству - наличие следующих элементов:
модуля программной обработки изображений юстировочного шаблона;
модуля вычисления матриц A1 и А2; модуля программной обработки
изображений объекта; модуля вычисления координат объекта.
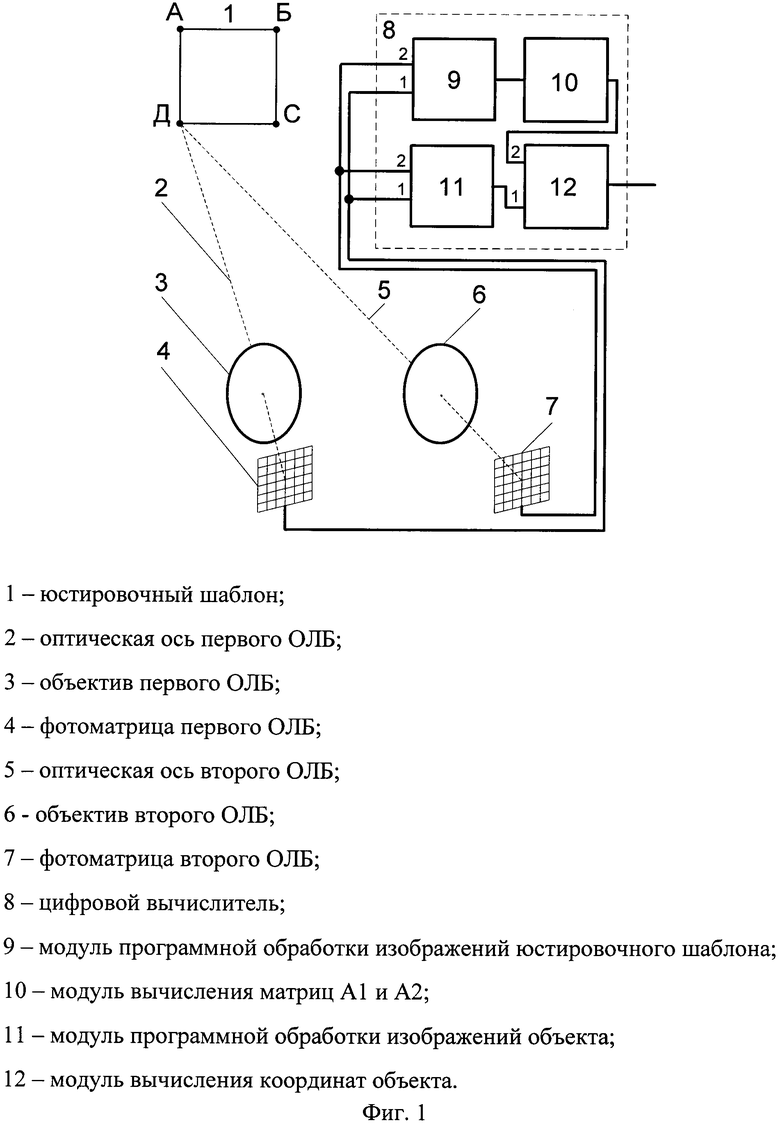
На фиг.1 изображено устройство для измерения координат объекта.
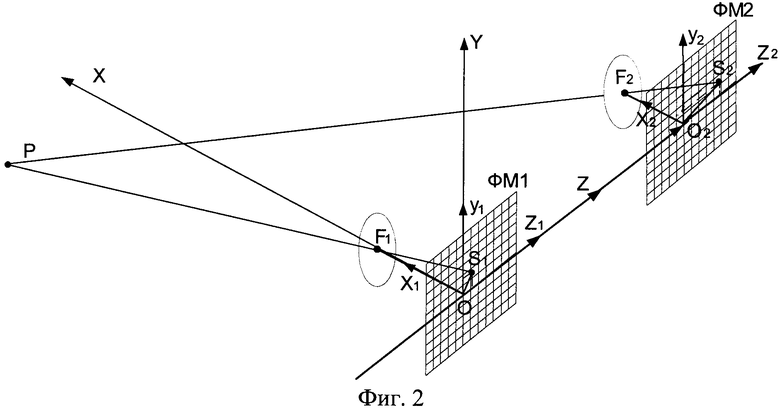
На фиг.2 показана геометрическая связь между изображениями идентичной точки объекта Р на фотоматрицах и точки Р, используемых при выводе выражений для координат X, Y, Z точки Р. На фиг.3 изображена стереоскопическая схема геометрического типа (аналог). На фиг.4 приведена схема трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (прототип).
Описание устройства для измерения координат объекта.
Два разнесенных оптико-локационных блока (фиг.1), в поле зрения которых располагают юстировочный шаблон 1 при юстировке и объект при измерении его координат. В состав первого и второго ОЛБ входят фотообъективы 3 и 6 и фотоматрицы 4 и 7 соответственно. Кроме этого, на фигуре 1 показаны оптические оси 2 и 5 первого и второго ОЛБ соответственно. Цифровой вычислитель 8, физически выполненный на микропроцессоре, включает в себя следующие программные модули:
модуль 9 программной обработки изображений юстировочного шаблона; модуль 10 вычисления матриц A1 и А2; модуль 11 программной обработки изображений объекта; модуль 12 вычисления координат объекта.
Описание работы устройства для измерения координат объекта.
Посредством фотообъективов ОЛБ на фотоматрицах получают изображения юстировочного шаблона.
Путем программной обработки изображений, формируемых на фотоматрицах ОЛБ, регистрируют координаты вершин А, Б, С, Д юстировочного шаблона (1). Эти действия осуществляются методами, описанными в [1], например, с использованием оконтуривания изображения и дальнейшего выделения в нем точек излома контура.
Рассмотрим процесс измерения координат объекта посредством двух разнесенных ОЛБ, оптические оси которых произвольно ориентированы в пространстве (фиг.2). В общем случае отклонения от идеального положения определяются поворотом вектора OnFn, который опишем матрицей направляющих косинусов Аn
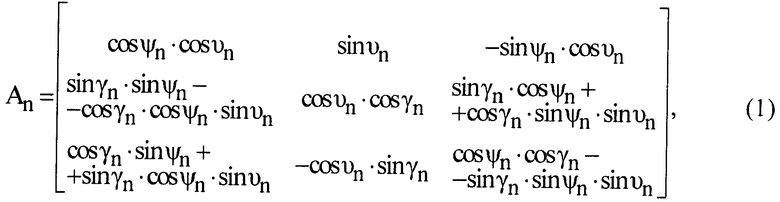
где ψn, υn, γn - произвольные углы поворота n-й фотоматрицы в последовательности - Оnуn, Onzn соответственно (n=1, 2).
Расстояние между центрами фотоматриц (смещения центра 2-й фотоматрицы относительно точки О) обозначим В. Кроме этого, фокусные расстояния фотообъективов F1≠F2.
Связь между единичными ортами системы координат OXYZ и ОnХnYnZn выразим следующим образом:
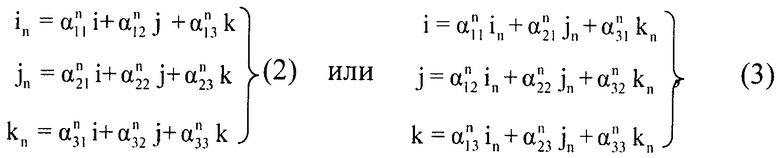
где  - элементы матрицы направляющих косинусов An,
- элементы матрицы направляющих косинусов An,
i, j, k и in, jn, kn - единичные орты системы координат OXYZ, связанной с ЛА и развернутой вместе с n-й фотоматрицей и фотообъективом системы координат O2X2Y2Z2.
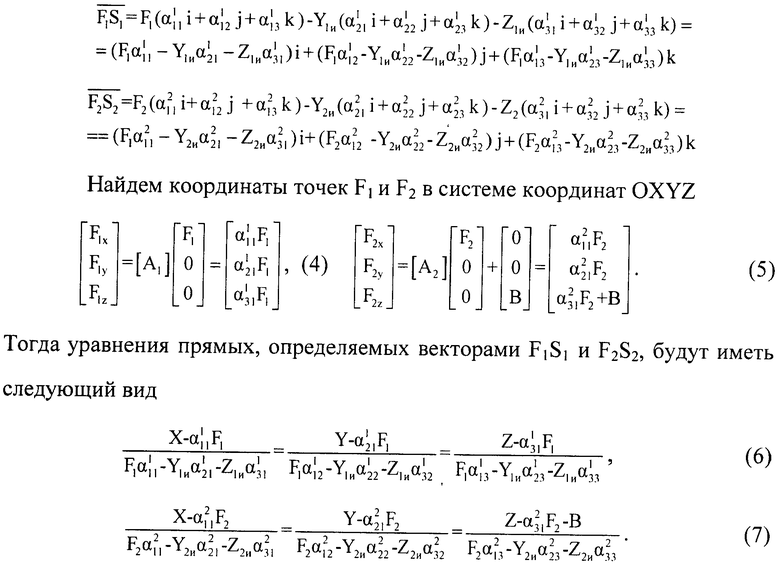
Выразим векторы F1P и F2P в системах координат O1X1Y1Z1 и O2X2Y2Z2 соответственно, при этом координаты изображений точки Р на фотоматрицах - точек S1 и S2 будем считать известными Y1и, Z1и и Y2и, Z2и. Поскольку точка Р является точкой пересечения векторов F1S1 F2S2, то ее координаты в системе OXYZ найдем в результате совместного решения уравнений прямых F1S1 и F2S2. Вектор F1S1 в системе O1X1Y]Z1 -  . Вектор F2S2 в системе O2X2Y2Z2 -
. Вектор F2S2 в системе O2X2Y2Z2 -  .
.
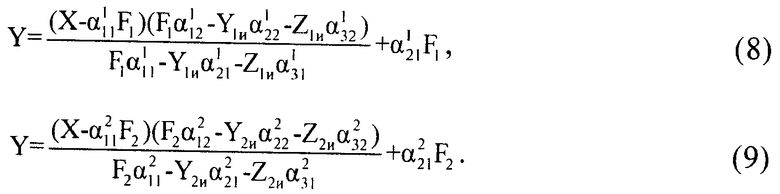
Подставим в полученные соотношения выражения (2), получим
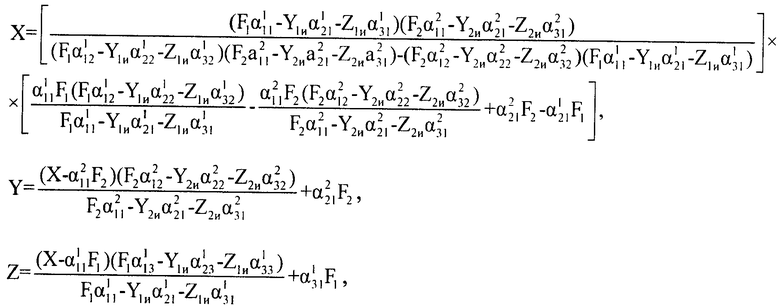
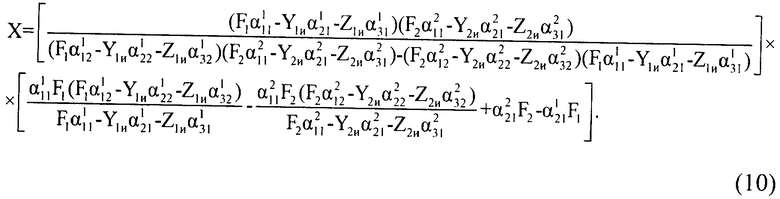
Решение этих уравнений как системы позволяет найти координаты точки Р, представляющей собой точку пересечения прямых. Выразим из левых частей двойных равенств (6) и (7) значения Y, получим
Приравнивая эти выражения, получим соотношение для вычисления координаты X, которая выражается следующим образом
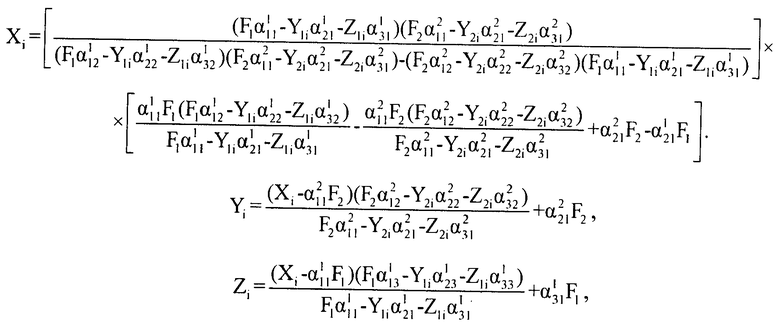
Теперь из двойного равенства (6) выразим координату Z

Соотношения (10), (9) и (11) позволяют вычислить три координаты объекта в системе OXYZ. Произвольное расположение ОЛБ относительно друг друга позволяет решать измерительные задачи для объектов с любым расположением, однако при неточно измеренных углах разворота оптических осей блоков погрешности измерений координат могут быть значительными, поэтому перед осуществлением измерений необходимо выполнить юстировку системы.
Юстировка системы технического зрения
Пусть СТЗ имеет неуправляемые блоки, установленные неизвестным образом, и требуется определить угловую ориентацию ОЛБ относительно системы координат OXYZ. Используют соотношения (9)-(11) для определения поправок, которые необходимо узнать перед проведением юстировочных работ на СТЗ. Располагают юстировочную матрицу в форме квадрата в поле зрения обоих ОЛБ, производят фотоэкспонирование и определение координат X1, Y1, Z1, Х2, Y2, Z2, Х3, Y3, Z3, X4, Y4, Z4 вершин квадрата посредством формул (9)-(11).
где Y1i, Z1i - координаты i-й точки изображений юстировочного шаблона на первой фотоматрице в системе координат OXYZ (i=1 для точки А, i=2 для точки Б, i=3 для точки С, i=4 для точки Д;
где Y2i, Z2i - координаты i-й точки изображений юстировочного шаблона на второй фотоматрице в системе координат OXYZ.
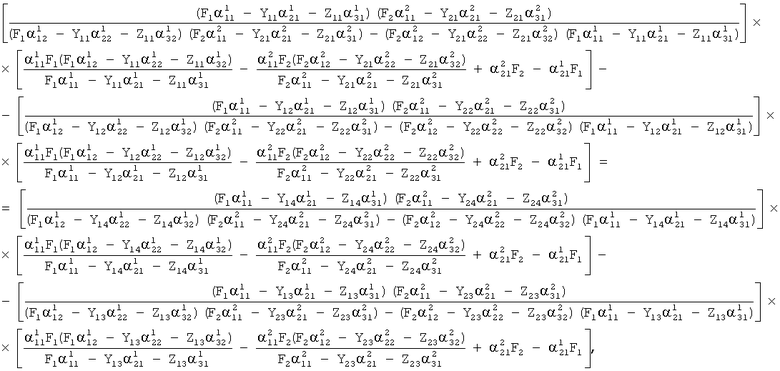
Вычитают попарно одноименные координаты точек 1, 2 и 3, 4, а затем точек 1, 4 и 2, 3. Приравнивают эти разности между собой следующим образом:
X1-Х2=Х4-Х3, Y1-Y2=Y4-Y3, Z1-Z2=Z4-Z3,
X1-Х4=Х2-Х3, Y1-Y4=Y2-Y3, Z1-Z4=Z2-Z3.
Или
Полученная система уравнений является нелинейной относительно искомых углов ψ1, υ1, γ1 и ψ2, υ2, γ2, поэтому ее численное решение находят одним из итерационных методов, например простых итераций. Измеренные углы учитывают алгоритмическим путем, для этого вычисляют коэффициенты матриц A1 и А2 по формуле (1).
Вычисление координат объекта осуществляют по формулам (10), (11), (9), которые обеспечивают большую точность определения координат за счет учета матриц A1 и А2, описывающих погрешности установки первого и второго ОЛБ.
Источники информации:
1. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - C.168-176.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2401436C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ АВТОДОРОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402037C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2010 |
|
RU2422772C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ВЕРТОЛЕТА НА ПОСАДКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334945C1 |
Изобретение относится к навигации, а именно к системам определения положения объекта без использования отражения или вторичного излучения, и может быть использовано для коррекции инерциальных навигационных систем летательных аппаратов, систем прицеливания и предупреждения столкновений. Достигаемый технический результат - обеспечение высокоточной юстировки. Способ заключается в регистрации изображений объекта посредством двух оптико-локационных блоков, программной обработке оцифрованных изображений юстировочного шаблона при юстировке, снимаемых с фотоматриц для определения координат изображений вершин юстировочной матрицы, вычислении матриц A1 и А2, описывающих положения оптических осей оптико-локационных блоков путем решения системы шести нелинейних алгебраических уравнений, программной обработке оцифрованных изображений объекта при измерении, вычислении координат идентичной точки объекта в связанной системе координат с учетом матриц A1 и А2. Устройство содержит два разнесенных оптико-локационных блока и цифровой вычислитель. Цифровой вычислитель включает в себя модуль программной обработки изображений юстировочной матрицы, модуль вычисления матриц A1 и A2, модуль программной обработки изображений объекта и модуль вычисления координат объекта. 2 н.п. ф-лы, 4 ил.
1. Способ измерения координат объекта, заключающийся в трехмерной локации точки с помощью оптико-локационных блоков, отличающийся тем, что перед измерением проводят юстировку, регистрируют изображения котировочного шаблона посредством двух оптико-локационных блоков, осуществляют программную обработку оцифрованных изображений, снимаемых с фотоматриц, определяют координаты Y1i, Z1i, Y2i, Z2i, где i=1…4, четырех вершин юстировочного шаблона, установленного в поле зрения оптико-локационных блоков, по которым вычисляют матрицы A1 и A2, путем решения системы шести уравнений относительно углов ψ1, υ1, γ1 и ψ2, υ2, γ2,




где F1, F2 - фокусные расстояния первого и второго объективов, м;

 ,
,
 ,
,
 - коэффициенты матриц направляющих косинусов A1 и А2 описывающих положения оптических осей первого и второго оптико-локационных блоков,
- коэффициенты матриц направляющих косинусов A1 и А2 описывающих положения оптических осей первого и второго оптико-локационных блоков,
где n=1…2, j=1…3 - номер строки, k=1…3 - номер столбца, ψn, υn, γn - произвольные углы поворота n-й фотоматрицы в последовательности ОnУn, Onzn соответственно (n=1, 2), при измерениях осуществляют программную обработку оцифрованных изображений объекта, снимаемых с фотоматриц, определяют координаты Y1и, Z1и, Y2и, Z2и идентичной точки объекта, вычисляют координаты объекта в связанной системе координат

 ,
,
 .
.
2. Устройство для измерения координат объекта, включающее разнесенные оптико-локационные блоки, содержащие каждый фотообъектив и чувствительную фотоматрицу, оптические оси которых направлены вдоль осей ортогональной системы координат и пересекаются в ее начале, отличающееся тем, что содержит два разнесенных оптико-локационных блока, имеющих параллельные оптические оси, цифровой вычислитель, включающий модуль программной обработки изображений юстировочного шаблона, модуль вычисления матриц A1 и А2, модуль программной обработки изображений объекта, модуль вычисления координат объекта, при этом модуль программной обработки изображений юстировочного шаблона, в котором определяют координаты изображений четырех вершин юстировочного шаблона на фотоматрицах, своим первым и вторым входами связан с фотоматрицей первого и фотоматрицей второго оптико-локационных блоков, на которых при юстировке с помощью фотообъектива первого и второго оптико-локационных блоков формируются изображения юстировочного шаблона, а своим выходом связан с входом модуля вычисления матриц A1 и А2, модуль программной обработки изображений объекта, в котором при измерении определяют координаты изображений идентичной точки объекта на фотоматрицах, своим первым и вторым входами связан с фотоматрицей первого и фотоматрицей второго оптико-локационных блоков, на которых с помощью фотообъектива первого и второго оптико-локационных блоков формируются изображения объекта, а своим выходом связан с первым входом модуля вычисления координат объекта - X, Y, Z, вторым входом связанного с выходом модуля вычисления матриц A1 и А2.
| Техническое зрение роботов | |||
| Под общ | |||
| ред | |||
| Ю.Г | |||
| Якушенкова, Машиностроение, 1990, с.168-176 | |||
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОСЛЕПЛЕНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1993 |
|
RU2097223C1 |
| RU 2003113464 А, 10.11.2004 | |||
| RU 2066458 С1, 10.09.1996 | |||
| US 2008279422 А1, 13.11.2008 | |||
| JP 2008275606 A, 13.11.2001 | |||
| WO 2008114207 A2, 25.09.2008. | |||

