Область техники, к которой относится изобретение
Настоящее изобретение относится к устройствам и способам для восстановления кровотока в закупоренных кровеносных сосудах и для прохождения закупорок.
Определения
Термин «дистальный» касается как направления перемещения, так и расположения, соответственно, перемещения в направлении от оператора или расположения дальше от оператора, например, к участку инструмента, вводимому in vivo (в тело).
Термин «проксимальный» касается как направления перемещения, так и расположения, соответственно, перемещения в направлении к оператору или расположения ближе к оператору, например, к участку инструмента, расположенному ех vivo (снаружи тела).
Термин «аксиальный» относится к направлению, по существу, по продольной оси кровеносного сосуда.
Термины «поперечный» и «радиальный» относятся к направлению, по существу, перпендикулярному продольной оси кровеносного сосуда.
Термин «складка» ниже относится к, по существу, аксиальной складке 340 в сосуде 300.
Обзор состояния техники
Частичная закупорка какой-либо артерии или вены в теле, в настоящем описании, сосуда, может замедлять кровоток настолько, что пострадавшая ткань может иметь неполноценную перфузию необходимого для жизни кислорода с последующим проявлением ишемии тканей, ишемической боли и некроза ткани. В сердце своевременное восстановление кровотока через закупоренные сосуды сердца может предотвратить острую сердечно-сосудистую недостаточность (CVA), рубцевание ткани, нарушение функции сердца и/или смерть.
В предпочтительном варианте лечения для восстановления кровотока через частично закупоренный кровеносный сосуд проводят чрескожно вводимую проволоку со спиральной проволочной оболочкой, именуемую в настоящем описании проволочным направителем, передний конец которой располагается дистально относительно закупорки. В ангиопластике, например, проволочный направитель применяют для проведения баллона к месту закупорки, где баллон расширяют с радиальным расширением, тем самым, закупорки и усилением кровотока через сосуд.
В полностью закупоренных кровеносных сосудах, включая застарелые полные закупорки (СТО), размер закупорки и ее твердость часто делают невозможным прохождение проволочного направителя через закупорку и в дистальном направлении по другую ее сторону. Восстановление кровотока через полностью закупоренный сосуд часто требует вскрытия грудной клетки и имплантации сосудов, которые обходят закупорку, т.е. хирургической операции, сопряженной с высокими показателями патологии и риска гибели.
Существует множество инструментов для лечения закупоренных кровеносных сосудов, все со своими недостатками.
В патенте США №6599304 изобретатели Селмон (Selmon) с соавторами предлагают устройство с «…по меньшей мере, одним шарнирно расширяющимся или отклоняющимся элементом, который можно механически приводить в действие приводным элементом, например, вытяжной проволокой или трубкой. Расширяющее или механическое усилие можно прилагать к стенке кровеносного сосуда и закупорке таким образом, чтобы разорвать, раздробить или иначе разрушить закупорку, прилегающую к стенке сосуда. Такое разрушение закупорки может создать канал или проход достаточного размера для доступа проволочного направителя…». Отклоняющиеся элементы описаны как кулачки, приводимые в действие приводным элементом: «В узле можно обеспечить приводную проволоку или приводной элемент 54 для перемещения кулачковых сегментов 42 из их первого сомкнутого положения в их второе раскрытое положение. В различных вариантах осуществления кулачковые сегменты 42 могут обладать разнообразными геометрическими формами, включая, но без ограничения, лопатообразную, прямую с вогнутым изгибом на конце, прямую с выпуклым изгибом на конце, треугольную (остроносую), прямоугольную и их комбинации».
В патенте США №6579302 изобретатели Дуэриг (Duerig) с соавторами предлагают устройство с расширителем, содержащим множество распорок: «Расширитель 15 может содержать множество продольно или кольцеобразно расположенных распорок, продолжающихся между дистальным участком и проксимальным участком расширителя, так что выдвижение расширителя 15 по проволочному сердечнику 20 отпускает распорки и позволяет им расширяться до их максимального диаметра, и выдвижение проволочного сердечника 20 через расширитель 15 выравнивает распорки в плоском сомкнутом состоянии».
В патенте США №5954742 изобретатель Осыпка (Osypka) предлагает устройство с экспандером, образующим цилиндрический каркас: «Как можно видеть, например, на фиг.6, 7 и 8, экспандер или расширяющее средство 5 образует удлиненный, по меньшей мере, по существу цилиндрический каркас, окруженный прямыми удлиненными сегментами 5а' расширяющихся элементов 5а, и сегменты 5а', по существу, параллельны один другому и центральной продольной оси каркаса».
В патенте США №5741270 изобретатели Хансен (Hansen) с соавторами предлагают следующее: «Пара упругих соединительных элементов 202 закреплена на пальцы 208 крепления элементов жесткости и к пальцам 210 крепления отводящих элементов. Соединительные элементы 202 выполнены из тонких полосок упругого материала, которые восстанавливают их исходную форму после деформирования. Один конец каждого из соединительных элементов 202 шарнирно соединен с пальцами 208 крепления элементов жесткости, тогда как другой конец каждого из соединительных элементов 202 шарнирно соединен с пальцами 210 крепления отводящих элементов».
В патенте США №4648402 изобретатель Сантос (Santos) предлагает многозвенный механизм: «Заднее звено 73 содержит внутреннюю вогнутую грань 773, и заднее звено 173 содержит внутреннюю вогнутую грань 873, которые вмещают сферу 78, когда она находится в ее крайнем переднем положении, когда механизм 70 находится в сомкнутой конфигурации. В разомкнутой конфигурации механизма 70 имеет место также результирующее смещение назад передних звеньев 74 и 174 и подвижного переднего сегмента 76».
В патенте США №4848342 изобретатель Калтенбах (Kaltenbach) предлагает поворотный катетер расширения с пружинной спиралью:
«Катетер содержит гибкую проволоку или удлиненный элемент 1, который снабжен выпуклостью или головной секцией со сферически изогнутой поверхностью 2 на его дистальном конце. На проволоку 1 надета пружинная спираль 3, и данная пружинная спираль содержит размыкаемые витки, которые могут радиально расширяться на ее дистальном конце с образованием нажимного элемента 4. В наглядном варианте осуществления спираль 3 представляет собой двойную спираль с крупным шагом из стальных проволок, которая вблизи дистального конца проволоки 1 характеризуется увеличенным интервалом между соседними витками для образования разомкнутых витков. Диаметр нажимного элемента можно увеличивать аксиальным сжатием разомкнутых витков пружинной спирали 3».
В патенте США №6800085 изобретатели Селмон (Selmon) с соавторами предлагают катетер с корпусом: «Дистально установленный корпус может дополнительно содержать, по меньшей мере, один шарнирно расширяющийся или отклоняющийся элемент, который можно механически приводить в действие приводным элементом, например, вытяжной проволокой или трубкой». Кроме того, имеется приводное устройство: «Приводной элемент, показанный пунктирными линиями 26, может перемещать или приводить в движение тупоконечный элемент из первого сомкнутого положения, показанного на фиг.1, во второе раскрытое положение, показанное на фиг.2».
В патенте США №6638247 изобретатели Селмон (Selmon) с соавторами предлагают следующее устройство: «В узле можно обеспечить приводную проволоку или приводной элемент 54 для перемещения кулачковых сегментов 42 из их первого сомкнутого положения в их второе раскрытое положение. В различных вариантах осуществления кулачковые сегменты 42 могут обладать разнообразными геометрическими формами, включая, но без ограничения, лопатообразную, прямую с вогнутым изгибом на конце, прямую с выпуклым изгибом на конце, треугольную (остроносую), прямоугольную и их комбинации. Кулачки 42 могут быть разнесены или отделены один от другого, даже когда сомкнуты, как показано на фиг.4».
В патенте США №5662606 изобретателей Кимино и др. упоминается катетер, который включает корпусный элемент и манипуляционную рукоятку, прикрепленную к проксимальному концу корпусного элемента. Корпусный элемент прикреплен к рукоятке, которая также содержит управляющее устройство, выполненное с возможностью управления одновременными перемещениями в первой плоскости и второй плоскости.
Линия управления изгибом является скользящей в направлении, параллельном продольной оси корпусного элемента, и имеет дистальный конец, прикрепленный к дистальному концу катетера, и проксимальный конец, прикрепленный к управляющему устройству рукоятки таким образом, что линия управления посредством перемещения управляющего устройства в первой плоскости вызывает изгиб дистальной части катетера.
Неэластичный элемент расположен внутри корпусного элемента катетера и является скользяще подвижным в направлении, параллельном продольной оси корпусного элемента, указанный неэластичный элемент увеличивает жесткость части корпусного элемента, к котором он расположен. Дополнительно, неэластичный элемент на его проксимальном конце соединен с управляющим устройством рукоятки таким образом, что перемещение управляющего устройства во второй плоскости управляет положением неэластичного элемента в корпусном элементе. В дополнительном аспекте, неэластичный элемент в одном из вариантов выполнения включает секцию сужающегося дистального конца и секцию с шариком, сформированным на дистальном конце, при этом сужающаяся секция заканчивается шариком. Сужающаяся секция позволяет более просто изгибать эту часть неэластичного элемента таким образом. что он продвигается в корпусном элементе, он может также способствовать изгибу катетера, который уже находится в необходимой позиции. Шарик предохраняет корпусный элемент катетера от прокалывания неэластичным элементом при перемещении неэластичного элемента и контактировании с изгибом корпусного элемента.
Международная публикация WO 00/12009 международной заявки PCT/US 99/19123 изобретателей Барбанка и др. раскрывает закрепляемый хирургический инструмент в целевом местоположении. «В другом аспекте изобретения, захватывающий ткань инструмент предусмотрен для извлечения ткани тела, он имеет продольную ось и содержит дистальный конец, приспособленный для введения в тело пациента, режущий элемент, расположенный на инструменте, для разрезания окружающей ткани, и конструкцию, расположенную на дистальном конце, для закрепления захватывающего ткань инструмента в заданном местоположении для обеспечения того, что захватывающий ткань инструмент будет оставаться на месте при проведении процедуры захватывания ткани, и желаемая ткань будет захвачена надлежащим образом».
В патенте США №5350355 изобретатель Склар упоминает «автоматизированный хирургический инструмент, выполненный с возможностью механического приведения в движение канюли в направлении стационарного корпуса и от него. При этом корпус выполнен с возможностью удерживания в руке или может быть приспособлен для закрепления на стационарной или подвижной опоре. Пользователь манипулирует переключателем или иным управляющим средством для подачи энергии к линейному двигателю внутри корпуса, который передвигает канюлю для размещения ее дистального конца на заданном расстоянии от корпуса. Канюля как таковая может быть перемещена к определенной точке внутри тела через разрез и последовательно перемещена к определенной области, за счет чего осуществляют операцию». Кроме того, «автоматизированный хирургический инструмент содержит корпус; по существу жесткую трубку, имеющую отверстие, с дистальным концом, выступающим из конца корпуса, и с проксимальным концом, расположенным внутри корпуса».
В патенте США №5211651 изобретатель Регер упоминает «катетерный атеротом, которым манипулируют вручную и которым хирург может удалять атеросклеротические бляшки из артерии за счет введения в артерию катетера в единственной точке, проксимальной к отложению бляшки. Бляшка срезается постепенно, путем последовательных шагов с отведением назад решетчатого ножа, установленного на дистальном конце катетера и сжимаемого до малого диаметра, соответствующего диаметру самого катетера. Решетчатый нож катетерного атеротома включает несколько лезвий, которые в целом расположены параллельно друг другу и по существу по спирали вокруг внутренней части катетера, который в дистальном направлении проходит за пределы дистального конца части внешней оболочки катетера, если решетчатый нож находится в радиально сжатом положении в ненапряженной конфигурации. Соответствующие концы каждого лезвия прикреплены к внутреннему элементу и внешней оболочке катетера таким образом, что когда дистальный конец внутреннего элемента придвигается ближе к дистальному концу внешней оболочки, элементы лезвий вынуждены изгибаться дугой в наружном направлении, расширяя решетчатый нож радиально. В варианте предпочтительного выполнения изобретения как продольное положение, так и поворотное положение внутреннего элемента катетера являются регулируемыми относительно внешней оболочки, и несколько лезвий являются гибкими, так что как наклон, так и радиальное дугообразное расширение лезвий являются управляемыми. Предпочтительно угол атаки острых кромок такой, что они зацепляют атеросклеротическую бляшку, но не обычную артериальную ткань».
Ни в одном из вышеупомянутых описаний не предлагалось устройство для применения in vivo, содержащее дугу в виде одного асимметричного радиально расширяемого наружу гибкого элемента с радиально уменьшенной пространственной формой и лишенное свободных радиально раздвижных концевых участков для предотвращения травматического повреждения сосудов, которое расширяет закупоренный сосуд и позволяет проходить закупорку поочередно повторяющимися заданными управляемыми идентичными шагами. Кроме того, контролируемое изгибание и раздвижение дуги, при регулируемых приложении усилия и длине шага, обеспечивают тип самодвижущегося устройства, которое расширяет закупоренный кровеносный сосуд и позволяет проходить закупорку вне зависимости от квалификации и умения оператора.
Описание изобретения
Бурав (100) для прохождения закупорок применяют для пенетрирования и прохождения закупорки (320) в кровеносном сосуде (300) посредством выполнения множества повторяемых нетравматических поочередных действий с двумя состояниями одиночной последовательности, содержащих, во-первых, радиальное расширение в одном направлении для вскрытия складки (340) в закупорке, за которым следует, во-вторых, внедрение в дистальном направлении в складку, и наоборот.
Бурав (100) для прохождения закупорок, содержащий расположенное ex vivo управляющее устройство бурава, приводит в действие вводимую in vivo рабочую секцию бурава. Сначала рабочую секцию бурава с примыкающим стержнем (130), содержащим проволочный направитель (120), направляют в положение примыкания к закупорке или складке закупорки. Параллельно или последовательно заданные значения устанавливают на управляющем устройстве бурава, а именно пороговые усилия расширения и длину шага дистального проникновения.
Затем рабочую секцию бурава приводят в действие с управлением по заданным значениям для поочередного повторения одинаковых шагов радиального расширения и дистального проникновения вне зависимости от квалификации и умения оператора (ОР). Однако задачей оператора является проведение рабочих секций бурава аксиально в сосуд.
Сущность изобретения
Один аспект нескольких вариантов осуществления изобретения относится к устройству для расширения прохода для кровотока через частично или полностью закупоренный кровеносный сосуд, при этом устройство содержит рабочую секцию бурава, предназначенную для применения в кровеносном сосуде in vivo. Бурав для прохождения закупорки сосуда, или бурав для прохождения закупорки, содержащий рабочую секцию бурава, управляемую расположенным ex vivo устройством управления бурава, определяется как устройство для применения при инвазивной хирургической операции для открывания просвета через частичную или полную закупорку, расположенную в кровеносном сосуде.
Рабочая секция бурава выполнена с возможностью обеспечения атравматического сцепления с тканью in vivo, в ходе движения качения, при регулируемых пределах порогов усилий и расстояний поступательного перемещения.
Целью настоящего изобретения является создание бурава (1000) для прохождения закупорок и способа для выполнения бурава для прохождения закупорок для прохождения в дистальном направлении закупорки (320) в сосуде (300), содержащем стенки (310) сосуда. Предлагается рабочая секция (100) бурава, выполненная с возможностью выполнения нетравматической повторяющейся операции в последовательности, содержащей как прогиб в аркообразное состояние с расширением радиально наружу, так и высвобождение в расправленное и выпрямленное состояние, и наоборот. Рабочая секция бурава содержит выпуклую поверхность, когда аркообразно прогнута, и также рабочий наконечник (МТ.123). В аркообразном состоянии, когда рабочая секция бурава расположена вблизи закупорки, рабочий наконечник и выпуклая поверхность внедряются и удерживаются с возможностью высвобождения в, соответственно, углубление (141) наконечника и углубление (151) свода дуги, расположенные противоположно друг другу с пространственным разнесением в сосуде, в соответствии с чем, сосуд асимметрично расширяется в радиальном направлении наружу для раскрытия складки (340) в закупорке.
Кроме того, в расправленном состоянии, следующем за аркообразным состоянием, рабочий наконечник поступательно перемещается в складку в дистальном направлении от углубления свода дуги на длину одного шага для каждой одиночной последовательности операции. Каждая следующая последовательность операции рабочей секции бурава сопровождается следующим дистальным углублением наконечника и следующим дистальным углублением свода дуги, и как следующее дистальное углубление наконечника, так и следующее дистальное углубление свода дуги расположены дистально относительно, соответственно, предыдущего углубления наконечника и предыдущего углубления свода дуги.
Кроме того, рабочая секция бурава выполнена с возможностью изгибания по регулируемой криволинейной форме прогиба. Также при внедрении сначала рабочего наконечника и затем выпуклой поверхности обеспечивается нетравматическое движение качения для радиального расширения наружу и для дистального поступательного перемещения.
Другой целью настоящего изобретения является создание рабочей секции бурава для выполнения операции за определенное число поочередных последовательностей, сопровождаемых таким же определенным числом радиальных расширений наружу и дистальных поступательных перемещений. Рабочая секция бурава поступательно перемещается, по существу, аксиально и дистально в сосуд в ходе поочередного движения переползания, сообщаемого каждой поочередной последовательностью операции.
Еще одной целью настоящего изобретения является создание бурава для прохождения закупорки, содержащего стержень (130) с расположенным ex vivo проксимальным концом (134), вводимым in vivo дистальным концом (135), наружной частью (136) и внутренней частью (137), поддерживающей внутри проволоку (120) с расположенным ех vivo проксимальным концевым участком (125) и вводимым in vivo дистальным концевым участком (121). Рабочая секция (100) бурава содержит гибкую и упругую дугу (110), расположенную с продольным соразмерным совмещением в дистальном направлении с дистальным концом стержня, и дуга содержит спинку (117) дуги между хвостовиком (115) дуги, жестко соединенным с дистальным концом стержня и опирающимся на него, и опорной полкой (112, 112Т, 1120V), продолжающейся в дистальном направлении от спинки дуги, при этом опорная полка содержит отверстие (113, 113F, 1130V) в опорной полке, которое выполнено с возможностью прохода проволоки через данное отверстие. В дополнение, узел (122, 122В, 122М, 1220V) приложения усилия, закрепленный на дистальной оконечности проволоки, выполнен с возможностью рабочей связи с отверстием в опорной полке и со стержнем для изгибания дуги в аркообразное состояние, когда стержень поступательно перемещается в дистальном направлении относительно узла приложения усилия, чтобы выпуклая поверхность расширяла сосуд в асимметричном радиальном направлении наружу, и для высвобождения дуги в расправленное состояние, когда проволока высвобождена, чтобы опорная полка поступательно переместила узел приложения усилия в дистальном направлении относительно углубления свода дуги на одну заданную длину шага для каждой одиночной последовательности операции.
Узел приложения усилия содержит, по меньшей мере, один гибкий участок и, по меньшей мере, один упругий участок.
Еще одной целью настоящего изобретения является создание узла приложения усилия, который расположен с продольным соразмерным совмещением в дистальном направлении с опорной полкой, и при этом дуга является касательной к стержню и продольно совмещенной со стержнем и выполнена так, чтобы сужаться от хвостовика дуги в дистальном направлении с образованием одиночного выступа, продолжающегося радиально наружу относительно проволоки, в соответствии с чем, совмещение узла приложения усилия с дугой, сужение дуги и одиночный радиальный выступ обеспечивают уменьшение размеров.
Еще одной целью настоящего изобретения является создание узла приложения усилия, который постоянно прикреплен к дистальному концу проволоки, и при этом узел приложения усилия и отверстие в опорной полке имеют конфигурацию для предоставления любой из двух возможностей, возможности прохода узла приложения усилия через отверстие в опорной полке и возможности предотвращения прохода узла приложения усилия через отверстие в опорной полке. В дополнение, узел приложения усилия и отверстие в опорной полке могут иметь конфигурацию для предоставления обеих возможностей, возможности прохода узла приложения усилия через отверстие в опорной полке и возможности предотвращения прохода узла приложения усилия через отверстие в опорной полке. Аналогично, узел приложения усилия может удерживаться у опорной полки с возможностью расцепления соединения при управлении с проксимальной стороны.
Дополнительной целью настоящего изобретения является создание дуги, которая конструктивно выполнена с коэффициентом жесткости пружины, постепенно снижающимся в дистальном направлении для прогиба под действием большего усилия у хвостовика дуги и под действием меньшего усилия у опорной полки, чем обеспечивается регулируемая атравматическая кривая прогиба дуги. Более того, дуга конструктивно выполнена с коэффициентом жесткости пружины, постепенно снижающимся в дистальном направлении для прогиба под действием большего усилия у хвостовика дуги и под действием меньшего усилия у опорной полки, и углубление свода дуги от выпуклой поверхности больше, чем углубление наконечника.
Еще одной дополнительной целью настоящего изобретения является создание бурава для прохождения закупорки, содержащего управляющее устройство (500) бурава, которое расположено ex vivo в рабочей связи с рабочей секцией бурава и содержит ограничитель усилий, выполненный с возможностью регулируемых выбора и настройки заданного предела порога усилий, прилагаемых к рабочей секции бурава, и шаговый ограничитель, выполненный с возможностью регулируемых выбора и настройки заданной длины шага в дистальном направлении, преодолеваемого в каждой одиночной последовательности операции.
Еще одной дополнительной целью настоящего изобретения является создание управляющего устройства бурава, которое обеспечивает идентичные заданные настройки предела усилий и длины шага для каждой последовательности в ряду поочередно повторяемых последовательностей. Кроме того, управляющее устройство бурава содержит
фиксатор стержня для фиксации стержня с возможностью отпускания относительно управляющего устройства бурава и для ограничения усилия, прилагаемого к стержню, и шаговый ограничитель для дистального продольного перемещения стержня с заданной длиной шага,
фиксатор проволоки для фиксации проволоки с возможностью отпускания относительно управляющего устройства бурава и для ограничения усилия, прилагаемого к проволоке, и
управляющее устройство бурава выполнено с возможностью рабочего манипулирования и управления проволокой и стержнем как независимо, так и в сочетании.
Дополнительной целью настоящего изобретения является создание бурава для прохождения закупорки, который, в аркообразном состоянии, имеет спинку дуги с выпуклой поверхностью, продолжающейся радиально наружу и от проволоки, и в котором хвостовик дуги закреплен к стержню, и опорная полка закреплена к проволоке посредством отверстия в опорной полке для непрерывного регулирования прогиба дуги, в соответствии с чем, узел приложения усилия является единственным свободно раздвижным концевым участком рабочей секции бурава.
Еще одной дополнительной целью настоящего изобретения является создание инструмента для прохождения закупорки, который обладает, по меньшей мере, одной режущей кромкой (112С), расположенной на периметре (112Р) опорной полки, направленной радиально наружу и от отверстия в опорной полке, и в котором, по меньшей мере, одна режущая кромка выполнена с возможностью радиального врезания в ткань закупорки in vivo.
Еще одной дополнительной целью настоящего изобретения является создание инструмента для прохождения закупорки, в котором:
а) узел приложения усилия направляют в контакт с аксиальной складкой в закупорке,
b) опорную полку упирают в узел приложения усилия,
с) рабочую секцию бурава приводят в аркообразное состояние, и, тем самым, накапливается кинетическая энергия, и дуга асимметрично расширяет сосуд в одном радиальном направлении наружу,
d) рабочая секция бурава высвобождается в расправленное состояние, и высвобожденная кинетическая энергия выдвигает дугу для дистального поступательного перемещения узла приложения усилия в складку, и
е) последовательность шагов с) и d) может поочередно повторяться, пока закупорка не оказывается пройденной и не восстановлен усиленный кровоток.
Еще одной дополнительной целью настоящего изобретения является создание инструмента для прохождения закупорки, в котором, в аркообразном состоянии, узел приложения усилия внедряется с возможностью высвобождения в углубление наконечника, выпуклая поверхность внедряется в углубление свода дуги для расширения складки и запуска механизма распространения разрушения для раскрывания и дистального углубления складки, и, в распрямленном состоянии, узел приложения усилия смещается на одну длину шага в дистальном направлении глубже в углубленную складку.
Еще одной дополнительной целью настоящего изобретения является создание инструмента для прохождения закупорки, в котором, в аркообразном состоянии, узел приложения усилия внедряется с возможностью высвобождения в углубление наконечника, выпуклая поверхность внедряется в углубление свода дуги для расширения складки и запуска механизма распространения вскрытия для раскрывания и дистального углубления складки, и, в распрямленном состоянии, узел приложения усилия смещается на одну длину шага в дистальном направлении глубже в углубленную складку.
Еще одной дополнительной целью настоящего изобретения является создание бурава для прохождения закупорок, в котором, когда узел приложения усилия выдвигается в дистальном направлении за закупорку, выполняется любая из следующих двух операций:
проволоку направляют в контакт со следующей закупоркой и выполняют следующую последовательность прохождения закупорки, и
стержень извлекают в проксимальном направлении в положение ex vivo, тогда как проволока остается расположенной на месте для применения при следующем медицинском вмешательстве.
Кроме того, дополнительной целью настоящего изобретения является создание бурава для прохождения закупорок, в котором, когда узел приложения усилия выдвигается в дистальном направлении за пройденную закупорку, стержень допускает извлечение в состояние ех vivo любым действием из следующих двух:
отводят отверстие в опорной полке в проксимальном направлении относительно узла приложения усилия и сдвигают отверстие в опорной полке по проволоке, и
выводят опорную полку в дистальном направлении из зацепления с узлом приложения усилия и извлекают стержень в проксимальном направлении.
Кроме того, дополнительной целью настоящего изобретения является создание бурава для прохождения закупорок, в котором рабочая секция бурава конструктивно предназначена допускать фиксацию, поступательное перемещение и поворот стержня и проволоки в любом из двух случаев, взаимно независимого манипулирования и взаимосвязанного манипулирования.
Кроме того, еще одной целью настоящего изобретения является создание бурава для прохождения закупорок, в котором аркообразное состояние обеспечивается дистальным поступательным перемещением стержня относительно и поверх проволоки до тех пор, пока опорная полка не придет в упор с узлом приложения усилий, и распрямленное состояние достигается дистальным поступательным перемещением проволоки относительно стержня. Дистальное поступательное перемещение имеет длину шага, которая находится в пределах от 1 мм до 50 мм.
Еще одной целью настоящего изобретения является создание бурава для прохождения закупорок, в котором углубление наконечника располагается напротив углубления свода дуги, и углубление свода дуги имеет ширину, выбранную из группы, состоящей из ширины, продолжающейся в проксимальном и дистальном направлениях относительно углубления наконечника, ширины, продолжающейся в проксимальном направлении относительно углубления наконечника, и ширины, продолжающейся в дистальном направлении относительно углубления наконечника.
Краткое описание чертежей
Неограничивающие варианты осуществления изобретения описаны ниже со ссылками на последующее описание примерных вариантов осуществления в сочетании с чертежами. Чертежи в основном показаны не в масштабе, и любые размеры предназначены только для примера и не обязательно для ограничения. На чертежах идентичные конструкции, элементы или части, которые показаны на, по меньшей мере, двух чертежах, предпочтительно обозначены идентичными или сходными числовыми позициями на всех чертежах, на которых они показаны, где:
На фиг.1 представлена принципиальная блок-схема бурава для прохождения закупорок,
На фиг.2 представлен вид сбоку дистального вводимого in vivo участка бурава для прохождения закупорок кровеносных сосудов, соответствующего фиг.1,
На фиг.3 представлено продольное сечение на виде сбоку, показанном на фиг.2,
На фиг.4 изображено расположенное ех vivo управляющее устройство бурава для приведения в действие бурава для прохождения закупорок сосудов,
На фиг.5 представлено продольное сечение управляющего устройства бурава, показанного на фиг.4,
На фиг.6 представлен увеличенный местный вид механизма фиксации проволоки управляющего устройства бурава, показанного на фиг.5,
На фиг.7 представлен увеличенный местный вид механизма фиксации стержня управляющего устройства бурава, показанного на фиг.5,
На фиг.8 изображена типичная операционная, используемая для операции с буравом для прохождения закупорок, соответствующим фиг.1,
На фиг.9 и 10 представлены частичные разрезы in vivo операции с буравом для прохождения закупорок, соответствующим фиг.1,
На фиг.11А, 11В, 12А-12С, 13А, 13В и 14А-14С представлены местные виды направления и применения бурава для прохождения закупорок, соответствующего фиг.1,
На фиг.15А, 15В, 16А, 16В, 17А, 17В-18 представлены местные виды, показывающие действие бурава для прохождения закупорок, соответствующего фиг.1,
На фиг.19А-19В изображены усовершенствования бурава для прохождения закупорок, соответствующего фиг.1,
На фиг.20A-20D изображен механизм изгибания и распрямления бурава для прохождения закупорок, соответствующего фиг.1,
На фиг.21А-21С изображены различные конфигурации хвостовика дуги,
На фиг.22А-22 В представлены дополнительные варианты осуществления опорной полки дуги,
На фиг.23А-23С представлен дополнительный вариант осуществления рабочей секции бурава, и
На фиг.24А, 24В, 25А-25С и 26 представлены местные виды различных дополнительных вариантов осуществления узла приложения усилия и опорной полки дуги.
Наилучшие варианты осуществления изобретения
На фиг.1 представлена блок-схема бурава для прохождения закупорок, показывающая взаимосвязи и основные элементы бурава 1000 для прохождения закупорок в работе, с проксимальным ex vivo участком и дистальным in vivo участком, выделенным пунктирной линией S-S. Как стержень 130, так и проволочный направитель 120, или проволока 120, содержат проксимальный расположенный ех vivo участок и дистальный вводимый in vivo участок. Направляющий катетер, через который в пациента вводят располагаемый in vivo участок бурава 1000 для прохождения закупорок, и пациент не показаны на фиг.1.
Оператор ОР работает с буравом 1000 для прохождения закупорок посредством расположенного ех vivo управляющего устройства 500 бурава, которое управляет вводимой in vivo рабочей секцией 100 бурава, управляющей дистальным участком проволоки 120 и стержня 130. В предпочтительном варианте 1000 осуществления рабочая секция 100 бурава содержит, например, гибкий и упругий элемент, например, дугу 110, жестко соединенную с дистальным участком стержня 130 и находящуюся в зацеплении с возможностью разъема с вводимым in vivo узлом 122 приложения усилия, соединенным с вводимым in vivo дистальным концевым участком проволоки 120.
В процессе работы проволоку 120 сначала направляют в дистальном направлении через кровеносные сосуды 300 внутри стенок 310 сосудов, пока узел 122 приложения усилия не войдет в контакт с закупоркой 320 или складкой 340 в закупорке 320. Тогда стержень 130 и узел 122 приложения усилия соединяются и приводятся в движение для сгибания и аркообразного искривления дуги 110. Тем самым узел 122 приложения усилия и выпуклая поверхность аркообразно изогнутой спинки 117 дуги внедряются в закупоривающую ткань, выкладывающую складку 340, в разъединяемое скрепление, с расположением смежно с противоположными стенками 310 сосуда.
В процессе работы изгибание дуги 110 расширяет складку 340 асимметрично в одном радиальном направлении и обеспечивает усилия для вызова и приведения в действие механизма распространения разрушения в закупорке 320, и для дальнейшего раскрывания и углубления в дистальном направлении складки 340. Затем усилия, действующие на дугу 110, ослабляются, в соответствии с чем, упругая энергия, накопленная в данной дуге при изгибании, высвобождается с расправлением дуги 110 и введением узла 122 приложения усилия на одну длину шага глубже в дистальном направлении в складку 340.
Аркообразное изгибание и высвобождение с расправлением дуги 110 являются, соответственно, первым и вторым состоянием последовательности, содержащей две фазы и выполняемой при управляющем воздействии управляющего устройства 500 бурава с поочередным повторением для прохождения через закупорку 320. При необходимости периодическое выполнение множества последовательностей поочередно повторяют для прохождения, по меньшей мере, одной закупорки. Образно выражаясь, рабочая секция 100 бурава свертывается кольцом при изгибании и развертывается при расправлении для дистального продвижения наподобие червяка в процессе переползания.
Управляющее устройство 500 бурава содержит механизм 540 фиксации стержня, или фиксатор 540 стержня, механизм 541 ограничения длины шага, или шаговый ограничитель 541, и ограничитель 542 усилия, причем все данные устройства соединены со стержнем 130. Кроме того, управляющее устройство 500 бурава содержит механизм 560 фиксации проволоки и ограничитель усилия, отличающийся от ограничителя усилия стержня, но обозначенный также позицией 542 на фиг.1, который соединен с проводом 120. Заметно, что узел 122 приложения усилия и дуга 110 возвращают управляющую информацию обратной связи в ограничитель 542 усилия.
Предусмотрен также дополнительный механизм 125 расцепления для отсоединения узла 122 приложения усилия in vivo от дуги 120, как дополнительно подробнее описано ниже.
Бурав для сосудов в сборе
На фиг.2 представлен вид сбоку вводимой in vivo рабочей секции 100 бурава, как примерного варианта осуществления участка бурава 1000 для прохождения закупорок, в соответствии с фиг.1. Рабочая секция 100 бурава содержит стержень 130, например, такой, как в существующей системе сосудистого катетера для лечения закупоренных кровеносных сосудов. Стержень 130 заканчивается дистально, например, дугой 110, которая является гибкой и упругой и содержит дистальный конец, заканчивающийся опорной полкой 112, где находится свободное отверстие 113 опорной полки. Проволочный направитель 120, или проволока 120, расположена соосно со стержнем 130, вдоль и внутри него, и с прохождением через отверстие 113 в опорной полке, которое выполнено с возможностью регулируемого двунаправленного перемещения и поворота проволоки 120. Проволока 120 содержит гибкий и упругий свободный дистальный концевой участок 121, оканчивающийся узлом 122 приложения усилия, показанным в виде сферической головки 122В и приспособленным для регулируемого и обратимого дистального выдвижения от опорной полки 112. В примерном варианте осуществления как узел 122 приложения усилия, так и дуга 110 содержат материал, не прозрачный для рентгеновского излучения, чтобы оператор ОР, наблюдающий за процедурой с использованием системы визуализации, например, компьютерного томографа (СТ) или радиографа, мог наглядно представлять расположение узла 122 приложения усилия относительно опорной полки 112.
Как показано на фиг.2, дистальный концевой участок 121 проволоки 120, выдвигающийся в дистальном направлении от опорной полки 112, изгибается под углом относительно стержня 130. Когда проволока 120 поворачивается внутри стержня 130, то дистальный концевой участок 121 становится направляющей линией, которая описывает наружную поверхность конуса. Поэтому, когда провод 120 расположен внутри сосуда 300, и оператор ОР желает ввести дистальный концевой участок 121 по кривой или в ответвление сосуда 300, проволоку 120 поворачивают, пока дистальный концевой участок 121 не оказывается направленным соответствующим образом для продолжения прохождения по кривой или в ответвление.
На фиг.2 и 3 указаны также детали стержня 130, например, проксимальный конец 134, вводимый in vivo дистальный конец 135, наружная часть 136 и внутренняя часть 137, которая служит опорой для проволоки 120, проходящей внутри него. Кроме того, показаны расположенные ех vivo проксимальный конец 125 и вводимый in vivo дистальный концевой участок 121 проволоки 120.
На фиг.3 представлено продольное сечение фиг.2, на котором сферическая головка 122В показана отведенной в проксимальном направлении и впритык к опорной полке 112, в противоположность положению, показанному на фиг.2, где сферическая головка 122В показана дистально выдвинутой от опорной полки 112.
Рельефный участок 114, который локально уменьшает площадь поперечного сечения дуги 110, образует особое место, в области которого дуга 110 будет деформироваться и изгибаться, когда испытывает аркообразно искривляющий ее нажим. Форма рельефного участка 114 не имеет значения при условии, что выполнены функциональные требования, и может быть реализована в виде выреза, выполненного участками плоскостей, или в виде скругленной кривой выбранной формы. То есть форма рельефного участка 114 не ограничена какой-либо конкретной формой и может быть выбрана по желанию.
Участок дуги 110, продолжающийся от ее проксимального концевого участка до рельефного участка 114, образует хвостовик 115 дуги, и участок дуги 110, продолжающийся от рельефного участка 114 до опорной полки 112, образует спинку 117 дуги. Хвостовик 115 дуги и проксимальный участок спинки 117 дуги расположены в вырезе 132, выполненном в дистальном участке стержня 130, так что дуга 110 продолжается продольно вместе со стержнем 130. Дуга 110 выполнена, например, из сверхгибкого и упругого материала, например, нитинола (nitinol) и, для примера, имеет длину около 1,4 сантиметра.
Для уменьшения размеров узел 122 приложения усилия расположен с продольным соразмерным совмещением в дистальном направлении с опорной полкой 112 и дугой 110 и выполнен с сужением от хвостовика 115 дуги в дистальном направлении с образованием одиночного выступа, продолжающегося радиально наружу относительно проволоки 120. Таким образом, уменьшение размеров достигается благодаря совмещению узла 122 приложения усилия с дугой 110, сужению дуги 110 и одиночному радиальному выступу.
Хотя и не показано на чертежах, дуга 110 сужается в дистальном направлении и, следовательно, имеет большую площадь поперечного сечения на проксимальных участках, чем на дистальных участках. Фактически дуга 110 представляет собой одно из возможных исполнений участка рабочей секции 100 бурава. Дуга 110 представляет собой гибкую и упругую стрелу, консольно установленную на стержне 130, с опорной полкой 112 в виде свободного конца стрелы. Спинка 117 дуги фактически представляет собой плоскую пружину, для которой дистальное сужение обеспечивает более низкую жесткость пружины или коэффициент жесткости пружины на дистальном концевом участке, в данном случае опорной полке 112, чем на проксимальном консольно установленном концевом участке, в данном случае рельефном участке 114. Ниже подробнее разъясняется важность обеспечения большей «мягкости» дуги 110 с дистальной стороны и большей «жесткости» с проксимальной стороны.
В примерном варианте осуществления хвостовик 115 дуги и, по меньшей мере, проксимальный участок рельефного участка 114 опоясаны окружающей стягивающей трубкой 116. Стягивающая трубка 116 сжимается для жесткой фиксации дуги 110 в соосном совмещении со стержнем 130 и для предотвращения любого относительного смещения дуги 110 относительно стержня 130. Стягивающая трубка 116 также захватывает рельефный участок 114 для более надежного крепления дуги 110 на стержне 130. Спинка 117 дуги не покрыта стягивающей трубкой 116 и, следовательно, свободна для изгибания.
Жесткая фиксация хвостовика 115 дуги к стержню 130 может быть обеспечена любым доступным практическим средством и не ограничивается применением стягивающей трубки 116, как дополнительно поясняется ниже. При желании стягивающую трубку 116 выбирают из материалов, которые создают прочное присоединение к дуге 110, например, материалов, содержащих нейлоны Nylon 11™ или Nylon 6™. Целесообразно отметить, что стержень 130 может иметь диаметр, например, 0,55 мм.
На фиг.3 показана спиральная навивная проволочная оболочка 124, охватывающая дистальный концевой участок 121 проволоки 120. Проволочная оболочка 124 имеет длину около 20 см и конформно сопрягается с проволокой 120, которая сужается в дистальном направлении на той же самой длине в диаметре, приблизительно от 0,05 мм до 0,01 мм. В примерном варианте осуществления отверстие 113 в опорной полке имеет диаметр 0,3 мм, и сферическая головка 112В имеет диаметр 0,35 мм.
На фиг.3 показано также, что дистальный участок проволоки 120 содержит проволочный сердечник 126, заключенный в навивную проволочную оболочку 124. В примерном варианте осуществления проволочная оболочка 124 имеет диаметр 1-0,5 мм, а проволочный сердечник 126 имеет диаметр в пределах от 0,05 мм до 0,01 мм. Для ясности, ниже упоминается просто «проволока 120».
Хотя рабочая секция 100 бурава описана выше как содержащая дугу 110, возможны другие варианты исполнения, при условии выполнения требований к функциональным и нетравматическим свойствам. Это означает, что всегда необходимо обеспечивать регулируемые усилия напряжения и изгиба для регулирования радиального расширения наружу в аркообразном состоянии, а также дистального перемещения при возврате в расправленное состояние.
На фиг.4 изображено расположенное ex vivo управляющее устройство 500 бурава для приведения в действие вводимой ех vivo рабочей секции 100 бурава, и на фиг.5 представлено продольное сечение фиг.4.
Как видно на фиг.4 и 5, управляющее устройство 500 бурава содержит дистальный орган 501 управления стержнем, в проксимальном соосном продолжении концентрично закрепленный в, по существу, цилиндрической рукоятке 550 для проволоки. Общая аксиальная проходная трубка 510 проходит как через дистальный орган 501 управления стержнем, так и через рукоятку 550 для проволоки. Дистальный участок 503 проходной трубки 510, проходящий через дистальный орган 501 управления стержнем, выполнен с возможностью предоставления свободного прохода через него стержня 130, тогда как проксимальный участок 553 проходной трубки 510, проходящий через рукоятку 550 для проволоки, выполнен с возможностью предоставления свободного прохода через него проволоки 120. Стержень 130, который расположен в более широкой части 503, не может проникать в более узкий проксимальный участок 553 проходной трубки 510, проходящий через рукоятку 550 для проволоки.
Орган 501 управления стержнем имеет унитарную конструкцию и содержит стержневую переднюю часть 530, кольцевой выступ 532 и стержневой корпус 534, все имеющие цилиндрическую форму и расположенные с концентричным соразмерным совмещением. Стержневая передняя часть 530 ориентирована дистально, со следующими за ней в проксимальном направлении, во-первых, кольцевым выступом 532 и, во-вторых, стержневым корпусом 534. Кольцевой выступ 532 радиально выступает наружу и от внешней поверхности передней части 530, стержневого корпуса 534 и рукоятки 550 для проволоки. Механизм 560 фиксации проволоки, или фиксатор 560 проволоки, проксимально и соосно присоединен к рукоятке 550 для проволоки.
На фиг.5 дополнительно изображен ограничитель 541 шага, или шаговый ограничитель 541, для настройки длины шага, например, с помощью установочного винта 543, соединенного с рукояткой 550 для проволоки, при этом установочный винт 543 вмещается в заглубление 545, выточенное в стержневом корпусе 534, и функционирование описано ниже.
Стержневой корпус 534 выполнен в виде охватываемого цилиндра, соосно вмещаемого внутри аксиального охватывающего отверстия, выполненного в рукоятке 550 для проволоки и предназначенного для обеспечения возможности взаимного относительного смещения органа 501 управления стержнем и рукоятки 550 для проволоки при поступательном движении в двух направлениях и в двух направлениях поворота. По отношению к рукоятке 550 для проволоки кольцевой выступ 532 имеет возможность перемещения в двух направлениях поворота и поступательного движения дистально наружу от данной рукоятки и проксимально назад к ней. Узел управляющего устройства 500 бурава предназначен для обеспечения возможности прецизионного управления двунаправленным смещением при поступательном движении и при повороте как проволоки 120, так и стержня 130, как более подробно описано ниже.
На фиг.6 представлен увеличенный местный вид механизма 560 фиксации проволоки, имеющего широко известную в технике конфигурацию и допускающего реверсивную фиксацию проволочного направителя 120 относительно рукоятки 550 для проволоки, при желании. Резьбовая выступающая часть 562, несущая наружную крепежную резьбу, расположена концентрично и в виде проксимального соразмерного продолжения проксимального конца рукоятки 550 для проволоки для согласованного зацепления с охватывающей крепежной резьбой, расположенной на внутренней поверхности колпачковой гайки 564. Проксимальный участок 553 общей аксиальной проходной трубки 510 соосно проходит как через резьбовую выступающую часть 562, так и через колпачковую гайку 564.
Манжета 566 проволоки, содержащая аксиальное отверстие для прохода через нее проволоки 120, содержит хвостовик 568 для проволоки и фиксирующие проволоку кулачки 570. Хвостовик 568 для проволоки и фиксирующие проволоку кулачки 570 вмещаются в соответствующее расширение, выполненное в проксимальной концевой части 553 аксиальной проходной трубки 510. Фиксирующие проволоку кулачки 570 манжеты 566 упруго разделяются на множество гибких и упругих кулачков, выполненных с возможностью действия в качестве конусного механизма фиксации. Дополнительные подробные сведения о данном широко известном конусном механизме фиксации приводить излишне.
Очевидно, что, когда охватывающую колпачковую гайку 564 вводят в резьбовое зацепление с охватываемой крепежной резьбой на задней выступающей части 562, колпачковая гайка 564 прилагает сжимающие усилия к фиксирующим проволоку кулачкам 570, которые отклоняются к проволоке 120 и тем самым прочно фиксируют ее и предотвращают смещение данной проволоки относительно рукоятки 550 для проволоки. Также очевидно, что, когда охватывающую колпачковую гайку 564 выводят из резьбового зацепления с охватываемой резьбой на задней выступающей части 562, фиксирующие проволоку кулачки 570 упруго отпускают свой захват проволоки 120, которая после этого получает возможность свободного поступательного перемещения и поворота относительно рукоятки 550 для проволоки.
Когда механизм 560 фиксации проволоки зафиксирован на проволоке 120, и рукоятку 550 для проволоки будут поворачивать по часовой стрелке и против часовой стрелки, то проволока 120 будет поворачиваться в том же самом направлении, соответственно, по часовой стрелке и против часовой стрелки. Аналогично, проволоку 120 можно в таком состоянии продольно перемещать в дистальном или проксимальном направлении, соответственно, дистально выдвигать, как показано на фиг.2, или отводить проксимально.
В примерном варианте осуществления фиксирующие проволоку кулачки 570 выполнены из материала, содержащего, например, такой металл, как латунь, или полимерный пластиковый материал, известный под товарным знаком Acculon™.
Механизм 560 фиксации проволоки содержит встроенный ограничивающий усилие механизм. Усилие, прилагаемое фиксирующими проволоку кулачками 570 к проволоке 120, определяет нагрузку, под действием которой проволока будет выскальзывать из фиксирующих проволоку кулачков 570. Таким образом, чем дальше и плотнее колпачковая гайка 564 навернута на выступающую часть 562 с охватываемой резьбой, тем больше усилие фиксации проволоки 120, и наоборот. Применимы также другие ограничивающие усилие механизмы. Можно также обеспечить показание порога ограничения усилия фиксации проволоки 120.
Как описано ниже, поступательное перемещение, поворот и неподвижное состояние проволоки 120 и стержня 130 являются взаимно независимыми, но могут выполняться во взаимосвязи.
На фиг.7 представлено продольное осевое сечение механизма 540 фиксации стержня, расположенного на дистальном участке органа 501 управления стержнем, в котором множество фиксирующих стержень кулачков 528 фиксируют стержень 130 с возможностью разжима и тем самым предотвращают продольное и поворотное перемещение стержня 130 относительно органа 501 управления стержнем.
В примерном варианте осуществления стержневая передняя часть 530 снабжена концентрическим передним отверстием 535 для вмещения в него хвостовика 531 стержня манжеты 533 стержня, содержащей множество гибких и упругих фиксирующих стержень кулачков 528. Фиксирующие стержень кулачки 528, через которые концентрически проходит дистальный участок 503 аксиальной проходной трубки 510, выполняют фиксацию с возможностью разжима стержня 130 посредством конусного механизма фиксации в широко известной в уровне техники конфигурации.
Манжета 533 стержня жестко соединена в аксиально совмещенном положении с ползунком 524, выполненным с возможностью свободного аксиального и продольного поступательного перемещения, таким образом, как в дистальном, так и в проксимальном направлениях, внутри камеры 536. Камера 536 представляет собой выполненный полостной объем, расположенный внутри стержневой передней части 530. Упругий элемент 522, например, по меньшей мере, одна спиральная цилиндрическая пружина 522, соответствующим образом вмещенная в глухое отверстие 538 под пружину, выполненное параллельно проходной трубке 510 в стержневой передней части 530 и приспособленное для вмещения пружины 522. Упругий элемент 522 отжимает ползунок 524 в проксимальном направлении. Тем самым ползунок 524 отводит манжету 533 стержня в стержневую переднюю часть 530, вследствие чего фиксирующие стержень кулачки 528 фиксируют стержень 130 и тем самым предотвращают поступательное перемещение и поворот данного стержня относительно органа 501 управления стержнем.
Когда механизм 540 фиксации стержня фиксирует стержень 130, и кольцевой выступ 532 перемещают поступательно в дистальном и проксимальном направлениях или поворачивают, то стержень 130 также, соответственно, перемещается поступательно в дистальном и проксимальном направлениях или поворачивается относительно рукоятки 550 для проволоки, показанной на фиг.5.
Для разжима зафиксированного стержня 130 ползунок 524 поступательно перемещают в дистальном направлении, и тем самым фиксирующие стержень кулачки 528 дистально выталкиваются из переднего отверстия 535 и радиально отгибаются наружу. Тем самым упругие фиксирующие стержень кулачки 528 раскрываются с разжимом захвата и отпускают стержень 130 для его свободного поступательного перемещения и поворота. С этой целью толкатель 520, закрепленный с поворотной степенью свободы в органе 501 управления стержнем, снабжен клином 521, выполненным с возможностью зацепления с ответной канавкой 523, выполненной с этой целью в ползунке 524. Когда оператор ОР нажимает на толкатель 520, то клин 521 поворачивается для зацепления канавки 523. Тем самым ползунок 524 сдвигается дистально к упругому элементу 522 с отпусканием зажима упругих фиксирующих стержень кулачков 528 на стержне 130.
Когда механизм 540 фиксации стержня разжимают нажимом на толкатель 520, стержень 130 отпускается для поступательного перемещения и поворота. Очевидно также, что целью поступательного перемещения и поворота проволочного направителя 120 и стержня 130 является предоставление оператору ОР возможности прецизионного манипулирования и позиционирования рабочей секции 100 бурава относительно закупорки 320, расположенной в сосуде 300. Кроме того, толкатель 520 действует как аварийная кнопка, обеспечивающая возможность моментального отсоединения стержня и снятия с сосуда 300 любого усилия или момента, прилагаемых к нему рабочей секцией 100 бурава.
Механизм 540 фиксации стержня содержит встроенный ограничивающий усилие механизм, позволяющий назначать порог ограничения для предотвращения приложения чрезмерных усилий к узлу 122 приложения усилия и дуге 110. Поджимное усилие, прилагаемое упругим элементом 522 к ползунку 524, является усилием, которым манжета 533 стержня подтягивается в проксимальном направлении, и чем больше поджимное усилие пружины, тем мощнее проксимальное усилие подтягивания. Проксимальное усилие подтягивания ползунка 524 прилагается к манжете 533 стержня с фиксацией стержня 130 усилием, пропорциональным поджимному усилию, прилагаемому упругим элементом 522. Один из механизмов регулирования усилия фиксации стержня состоит в замене установленного упругого элемента 522 более жестким или мягким элементом для получения, соответственно, больших или меньших усилий фиксации для удерживания стержня.
Возможны другие механизмы регулирования усилия фиксации стержня. Одним из примеров, не показанным на чертежах, является предварительное подпружинивание пружины 522, например, посредством регулируемого винта для ослабления аксиального сжатия пружины. Чем сильнее сжата пружина 522, тем сильнее фиксирующие стержень кулачки 528 сжимают стержень 130 и больше усилия удержания фиксации, действующие на стержень 130.
Следовательно, когда дуга 110 изгибается до аркообразной формы, усилие, имеющее величину ниже порога ограничения, будет предотвращать поломку проволочного направителя 120 и отделение от него узла 122 приложения усилия. Кроме того, радиальное усилие, прилагаемое дугой 110 к стенке 310 сосуда, можно выдерживать ниже порога ограничения для предотвращения повреждения сосуда 300.
В примерном варианте осуществления фиксирующие стержень кулачки 528 выполнены из эластомерного материала, содержащего, например, полимерный пластиковый материал, известный под товарной маркой Teflon™ (тефлон). При относительно низком коэффициенте трения выбранного материала механизм 540 фиксации стержня будет предоставлять проход при превышении заданного усилия для обеспечения возможности проскальзывания стержня 130 в фиксирующих стержень кулачках 528 и предотвращения воздействия усилия сверх требуемого к проволоке 120, узлу 122 приложения усилия и дуге 110.
На фиг.5 представлен концептуальный вариант осуществления механизма 541 ограничения длины шага, также показанного на фиг.1. Установочный винт 543, соединенный с рукояткой 550 для проволоки и продолжающийся радиально внутрь для вмещения в заглубление 545, действует как стопор для ограничения длины шага. Когда стержневой корпус 534 поступательно перемещается в дистальном направлении, поступательное перемещение застопорится, когда установочный винт 543 приходит в упор с проксимальной стенкой 547 заглубления 545. В предположении, что механизм 540 фиксации стержня зафиксирован на стержне 130, и механизм 560 фиксации проволоки зафиксирован на проволоке 120, когда стержневой корпус 534 поступательно перемещают в дистальном направлении, застопоривание поступательного перемещения установочного винта 543 проксимальной стенкой 547 будет ограничивать длину шага дистального поступательного перемещения, сообщаемого стержню 130, относительно проволоки 120.
Ограничитель 541 длины шага может быть осуществлен в разных вариантах, не рассмотренных в настоящем описании. Например, установочный винт 543 или любой другой механический стопор, например штифт, можно располагать в определенном регулируемом положении на рукоятке 550 для проволоки относительно проксимальной стенки 547 для обеспечения возможности регулировки длины шага. Хотя на фигурах не показано, можно также рассмотреть возможность выполнения сквозных отверстий в рукоятке 550 для проволоки, на разных расстояниях от проксимальной стенки 547, для обеспечения различных длин шагов, когда установочный винт 543 или штифт вводят в соответственно выбранное отверстие. Очевидно, возможны и другие исполнения ограничителя 541 длины шага.
Таким образом, оператору ОР предоставлено многофункциональное управляющее устройство 500 бурава, содержащее фиксатор 540 стержня для допускающей освобождение фиксации стержня 130 относительно управляющего устройства 500 бурава и для ограничения усилия, прилагаемого к стержню 130, шаговый ограничитель 541 для дистального поступательного перемещения стержня 130 с заданной длиной шага, фиксатор 560 проволоки для допускающей освобождение фиксации проволоки 120 относительно управляющего устройства 500 бурава и для ограничения усилия, прилагаемого к проволоке. Следует отметить, что управляющее устройство 500 бурава выполнено с возможностью рабочего манипулирования и управления проволокой 120 и стержнем 130 как независимо, так и в сочетании.
Таким образом, управляющее устройство 500 бурава расположено ex vivo в рабочей связи с рабочей секцией 100 бурава и содержит внутренний механизм ограничения усилия, выполненный с возможностью регулируемых выбора и настройки заданного порогового предела усилий стержня и усилий проволоки, прилагаемых к рабочей секции 100 бурава, и шаговый ограничитель, выполненный с возможностью регулируемых выбора и настройки заданной длины шага в дистальном направлении, одинаково преодолеваемого и повторяемого в каждой одиночной последовательности операции. Не оператор ОР, а именно управляющее устройство бурава обеспечивает идентичные заданные настройки предела усилий и длины шага для каждой последовательности в ряду поочередно повторяемых последовательностей.
Другими словами, проволока 120 и стержень 130 могут поступательно перемещаться через управляющее устройство 500 бурава и извлекаться из него в дистальном направлении, но проволока может также извлекаться из него в проксимальном направлении.
Лечение закупоренного сосуда
На фиг.8 изображена типичная операционная 400, используемая для операции с буравом 1000 для прохождения закупорок, которая содержит операционный стол 458, аппарат 468 визуализации и дисплей 470, который предоставляет в реальном времени изображение проходящего лечение сосуда 300. В примерном варианте осуществления, когда осуществляют лечение коронарной артерии 300, пациента 420 укладывают в положение, лежа на стол 458, и стержень 130 проводят через катетер 430, который входит в пациента 420 через разрез 424 в бедренной артерии 428, как показано на фиг.9.
На фиг.9 и 10, который является увеличенным местным видом фиг.9, представлены частичные разрезы in vivo направляющего катетера 430, входящего через разрез 424 в бедренную артерию 428, показанную в сечении. Управляющим устройством 500 бурава в сборе манипулируют так, чтобы стержень 130 проходил по направляющему катетеру 430 к сердцу 482, где дистальный конец 431 катетера сообщается с коронарной артерией 490, имеющей ответвление 300 сосуда, которое содержит закупорку 320.
Для лечения закупорки 320 сначала необходимо провести дистальный участок бурава 1000 для прохождения закупорок через сосуды 300, пока рабочая секция 100 бурава не сталкивается с закупоркой 320. Рабочую секцию 100 бурава приводят в действие, при этом узел 122 приложения усилия выдвинут дистально от опорной полки 112, как показано in vivo на фиг.10. Дистальный концевой участок 121 проволоки, заканчивающийся рабочим наконечником (МТ,123), свободно свисает в гибкой конфигурации, допускающей изгибание и искривление проволоки 120 через изгибы и ответвления, встречающиеся в кровеносных сосудах. Рабочий наконечник обозначен как МТ или 123.
На практике, бурав 1000 для прохождения закупорок снабжен проволокой 120, которая имеет длину около 185 см, и стержнем 130, имеющим длину около 140 см. В заводской настройке узел 122 приложения усилия выдвигается, приблизительно, на 45 см дистально от опорной полки 112. Данное расстояние обычно подходит оператору. При желании, как к проволоке 120, так и к стержню 130 можно присоединять надставки, не показанные на фигурах, но обычно применяемые на практике.
Упомянутое расположение заводской настройки всегда можно изменить. Для дистального выдвижения сферической головки 122 от опорной полки 112, управляющим устройством 500 бурава необходимо манипулировать следующим образом. Механизм 540 фиксации стержня фиксируют, тогда как механизм 560 фиксации проволоки разжимают, и проволочный направитель 120 вручную проталкивают в дистальном направлении относительно рукоятки 550 для проволоки, для выдвижения, приблизительно на 40-100 мм. Для сохранения заданной дистанции между узлом 122 приложения усилия и опорной полкой 112, механизм 560 фиксации проволоки фиксируют, как зафиксирован механизм 540 фиксации стержня, так что поступательное перемещение управляющего устройства 500 бурава будет одновременно вызывать поступательное перемещение как проволоки 120, так и стержня 130.
На первом этапе, как показано in vivo на фиг.11А, оператор проводит одновременно как стержень 130, не показанный на фиг.11А, так и проволоку 120 или только проволоку 120 в дистальном направлении в сосуд 300 поступательным продвижением вручную к положению, где возникает, и пока не возникает контакт рабочего наконечника МТ, в данном случае узла 122 приложения усилия, с закупоркой 320, т.е. настолько далеко в дистальном направлении, насколько можно, в складку 340.
На втором этапе механизм 540 фиксации стержня фиксируют, и механизм 560 фиксации проволоки разжимают. Проволочный направитель 120 сохраняют на месте крепким удерживанием оператором ОР в одной руке, например, в левой руке LH, пока другая рука толкает управляющее устройство 500 бурава, следовательно, также стержень 130, для дистального поступательного перемещения поверх проволоки 120, как показано ex vivo на фиг.11В. Следует отметить, что механизм 540 фиксации стержня зафиксирован, поскольку толкатель 520 не нажат. Дистальное поступательное перемещение заканчивается, когда опорная полка 112 останавливается с упором в узел 122 приложения усилия, как показано in-vivo на фиг.12А.
Следует отметить, что, когда опорная полка 112 упирается в узел 122 приложения усилия, дуга 110 усиливает жесткость дистального концевого участка 121 проволочного направителя 120, который тем самым делается негибким. Кроме того, оператору ОР предоставляется ех vivo визуальный сигнал обратной связи, указывающий, что сферическая головка 122 находится в механическом контакте с опорной полкой 112, открыванием метки, не показанной на фигурах, расположенной на проволоке 120. Метка, знак или надпись соответственно расположен(а) на проксимальном участке проволоки 120 так, чтобы, когда стержень введен в дистальном направлении до упора опорной полки 112 в сферическую головку 122, метка открывалась ex vivo, когда происходит контакт, путем появления проксимально от управляющего устройства 500 бурава.
При использовании широко применяемого на практике материала, не прозрачного для рентгеновского излучения, размещение и относительное местоположение разных компонентов рабочей секцией 100 бурава также представляются оператору на рентгеновском устройстве.
Для ориентации опорной полки 112 в соответственно выбранном направлении для дальнейшего, как можно более глубокого входа в положение сцепления со складкой 340 закупорки 320, сначала фиксируют механизм 540 фиксации стержня и механизм 560 фиксации проволоки. Затем управляющее устройство 500 бурава удерживают рукой, как показано ex vivo на фиг.12В, и кольцевой выступ 532 поворачивают в заданном направлении, например, большим пальцем Т, для поворота стержня 130 вместе с дугой 110 и опорной полкой 112. При зафиксированных как механизме 560 фиксации проволоки, так и механизме 540 фиксации стержня можно поворачивать кольцевой выступ 532 в любом направлении и поступательно перемещать стержень 130 в дистальном направлении, как показано ех vivo на фиг.12В, соответственно, стрелками А и R.
Очевидно, что можно также отпустить механизм 560 фиксации проволоки для выдвижения узла 122 приложения усилия в дистальном направлении от опорной полки 112 и для независимого манипулирования проволочным направителем 120, даже несмотря на то, что первая конфигурация является более жесткой, чем последняя.
Теперь рабочая секция 100 бурава расположена правильно для лечения закупорки 320, если проникание узла 122 приложения усилия в складку 340 было успешным, как показано на фиг.12С, или даже когда узел 122 приложения усилия только упирается в закупорку 320, как показано на фиг.12А.
На третьем этапе, как показано ex vivo на фиг.13А, с упором узла 122 приложения усилия в опорную полку 112 и фиксированием обоих механизмов 540 и 560 фиксации, соответственно, стержня и проволоки, кольцевой выступ 532 толкают в дистальном направлении от рукоятки 550 для проволоки, которую оператор ОР твердо удерживает в ладони рукой Н пальцами F. Кольцевой выступ 532 толкают большим пальцем Т для поступательного перемещения в дистальном направлении, показанном стрелкой А, и тем самым вынуждают стержень 130 поступательно перемещаться в дистальном направлении относительно проволоки 120 на аксиальное расстояние D, например, 0,5 сантиметра.
Переход из расправленного состояния после аркообразного состояния вынуждает рабочий наконечник (МТ, 123) поступательно перемещаться в складку 340 в дистальном направлении от углубления свода дуги на длину одного шага для каждой одиночной последовательности операции. Таким же образом, каждая следующая последовательность операции рабочей секции бурава сопровождается следующим дистальным углублением наконечника и следующим дистальным углублением свода дуги, и как следующее дистальное углубление наконечника, так и следующее дистальное углубление свода дуги расположены дистально относительно, соответственно, предыдущего углубления наконечника и предыдущего углубления свода дуги. Когда рабочая секция 100 бурава применяется для выполнения определенного числа поочередных последовательностей, данным последовательностям сопутствует такое же определенное число радиальных расширений наружу и дистальных поступательных перемещений.
Поскольку проволока 120 остается зафиксированной на месте, в то время как стержень 130 вынуждается к дистальному поступательному перемещению, и узел 122 приложения усилия остается в положении упора в опорную полку 112, то упругая дуга 110 принуждается к аркообразному сгибанию радиально наружу и дальше от проволочного направителя 120, как показано на фиг.13В. Заметно, что, как показано на фиг.3, опорная полка 112 изогнута под косым углом относительно спинки 117 дуги, из-за чего узел 122 приложения усилия сначала контактирует с опорной полкой 112 в четко заданной точке Р, показанной на фиг.3, где прилагаются начальные изгибающие моменты. Кроме того, рельефный участок 114 образует место, в котором дуга 110 будет начинать изгибаться и принимать аркообразную форму.
Как изложено выше, размеры и сужение гибкой дуги 110 выбираются так, чтобы обеспечить регулируемые заданные формы прогиба для радиального изгиба наружу дуги 110 в легко прогнозируемом режиме точно определяемых кривых прогиба.
Как показано на фиг.13В, и другими словами, узел 122 приложения усилия внедряется в один участок закупорки 320 с созданием первого углубления 141 наконечника, в котором закрепляется узел 122 приложения усилия. С узлом 122 приложения усилия, закрепленным в первом углублении 141 наконечника, выпуклая поверхность изогнутой спинки 117 дуги при аркообразной дуге 110 контактирует с диаметрально противоположным боковым участком закупорки 320 и внедряется в него с созданием первого углубления 151 свода дуги. Сосуд 300 тем самым расширяется асимметрично и радиально наружу, и складка 340 будет вскрываться по типу процесса распространения трещины, с последовательным раскрыванием в дистальном направлении на заново вскрываемых участках складки. Фактически, изгибающаяся дуга 110 прилагает усилия для расширения материала закупорки и вскрытия прохода вдоль настоящего просвета, который представляет собой последний канал кровотока, который был доступен до образования закупорки.
Таким образом, можно сказать, что рабочий наконечник (МТ, 123) узла 122 приложения усилия и выпуклая поверхность изогнутой спинки 117 дуги внедряются и удерживаются с возможностью освобождения в, соответственно, углубление 141 наконечника и углубление 151 свода дуги или, соответственно, закрепление ТА наконечника и закрепление АА дуги, которые расположены противоположно одно другому с пространственным разделением в сосуде 300. Тем самым сосуд расширяют асимметрично в радиальном наружном направлении для вскрытия складки 340 в закупорке 320.
Для дальнейшего проникания в закупорку 320 узел 122 приложения усилия должен продвинуться дистально для контакта со вновь вскрытым участком складки 340 и внедрения в него. С этой целью, как показано ex vivo на фиг.14А, кольцевой выступ 532, предварительно отжатый на расстояние D, показанное на фиг.13А, теперь захватывают между большим пальцем Т и указательным пальцем IND. Затем другие пальцы F разжимают для освобождения захвата рукоятки 550 для проволоки ладонью руки Н, как показано ex vivo на фиг.14В. Тем самым энергия, накопленная в аркообразной дуге 110, высвобождается для проталкивания опорной полки 112 в дистальном направлении, показанном стрелкой AR, пока рукоятка 550 для проволоки не придет в упор с кольцевым выступом 532.
Отпускание дуги 110 с накопленной энергией из аркообразного состояния в расправленное состояние двигает опорную полку 112, а также узел 122 приложения усилия в дистальном направлении в складку 340. Когда изогнутая дуга 110 освобождается, первое углубление 151 свода дуги, в которое внедрена аркообразная выпуклая поверхность спинки 117 дуги, становится точкой опоры, от которой опорная полка 112 развертывается в дистальном направлении. Поэтому, когда первое углубление 151 свода дуги служит опорой, форма кривой изогнутой дуги 110 отличается от любой формы, образующейся во время изгибания дуги 110.
Хотя дистальный участок дуги 110, продолжающийся между первым углублением 151 свода дуги и углублением 141 наконечника, освобождается для выпрямления, проксимальная опора выпуклой поверхности постепенно понижается в проксимальном направлении, пока не вернется к рельефному участку 114, который достигается в расправленном втором состоянии. Это позволяет узлу 122 приложения усилия проволочного направителя 120 проникать дальше дистально в складку 340, как показано in vivo на фиг.14С.
Как указано выше, дистальный участок проволоки 120, который держит узел 122 приложения усилия, и дуга 110, которая расположена на дистальном участке стержня 130, образуют рабочую секцию 100 бурава. Рабочая секция 100 бурава напрягается, когда дуга 110 изгибается с образованием аркообразной формы при смыкании интервала, отделяющего дистальный конец стержня 130 от опорной полки 112. Когда дуга 110 высвобождается для расправления и выпрямления, узел 122 приложения усилия выталкивается дистально дальше в складку 340.
Обычно одиночной двухшаговой последовательности операции рабочей секции 100 бурава не достаточно для прохождения закупорки 320, и последовательность изгибаний и развертываний в ходе процесса переползания наподобие червяка требуется повторять.
И снова кольцевой выступ 532 толкают большим пальцем Т для поступательного перемещения в дистальном направлении, таким же образом, как пояснялось в связи с фиг.12В и 13А. В фазе изгиба процесса переползания дугу 110 аркообразно изгибают, как показано in vivo на фиг.15А, чтобы узел 122 приложения усилия контактировал с вторым углублением 142 наконечника, расположенным дистально от первого углубления 141 наконечника, и закрепился в данном углублении. Аналогично, спинка 117 дуги контактирует со вторым углублением 152 свода дуги, расположенным дистально от первого углубления 151 свода дуги, и закрепляется в данном углублении, в боковом участке закупорки 320, диаметрально противоположном второму углублению 142 наконечника.
И, наконец, кольцевой выступ 532 захватывают большим пальцем Т и указательным пальцем IND, а другие пальцы F разжимают аналогично тому, как описано выше в связи с фиг.14А и 14В. Тем самым дуга 110 расправляется и выпрямляется, и минует в дистальном направлении второе углубление 142 наконечника, и сферическая головка 122 вжимается для дистального проникания в складку 340 на втором шаге процесса переползания, как показано in vivo на фиг.15В.
И снова узел 122 приложения усилия контактирует с вновь образованной трещиной, расширенной асимметричным расширением сосуда 300. Процесс переползания рабочей секции 100 бурава, как описано выше, можно повторять столько раз, сколько необходимо для дальнейшего проникания в закупорку 320 и, наконец, для прохождения данной закупорки и дистального выхода из нее.
Не обязательно подробно объяснять, что рабочей секцией 100 бурава можно манипулировать для прохождения сквозь ряд последовательных закупорок, расположенных в сосуде 300 до тех пор, пока проволочный направитель не пройдет и не выйдет в дистальном направлении из последней последовательной закупорки. Обычно сферическая головка 122 продвигается вперед в дистальном направлении поочередными шагами длиной около 5 мм перед созданием дополнительных углублений наконечника и свода дуги.
Во время испытаний бурава 1000 для прохождения закупорок проход для кровотока через закупорку 320 длиной 7 сантиметров был вскрыт путем выполнения 14 последовательностей аркообразного изгибания и расправления дуги 110. Таким образом, бурав 1000 для прохождения закупорки может проходить частичную или сплошную закупорку 320 практически любой длины, включая застарелую полную закупорку.
Следует заметить, что двухшаговая последовательность изгибания и расправления дуги 110 обусловлена и регулируется расположенным ex vivo управляющим устройством 500 бурава. Это означает, что, после того как оператор ОР выбрал и настроил значения длины шага, предельного усилия удерживания стержня и предельного усилия удерживания проволоки, данные выбранные значения выдерживаются и будут многократно и идентично применяться в дальнейших последовательностях операции и не будут зависеть от квалификации и умения оператора ОР. Например, оператор ОР может выбрать и настроить расстояние D для длины шага в пределах, например, от 1 мм до 20 мм, и выбранное расстояние D выдерживается в продолжение поочередных последовательностей операции, выполняемых рабочей секцией 100 бурава, пока оператором ОР не установлено новое значение.
Чтобы помочь оператору ОР, применяющему бурав 1000 для прохождения закупорок, направлять и ориентировать узел 122 приложения усилия в дистальном направлении, в сосуд 300 можно вводить краситель 160, непрозрачный для рентгеновских лучей. Тем самым внутренность сосуда 300 становится видимой как темная область на экране визуализирующей системы, с четким установлением границ сосуда 300 и любой закупорки 320. Вследствие этого устанавливаются четкие границы углублений наконечника, боковых углублений свода дуги и трещин складки 340. Для дальнейшего повышения качества изображения, представляемого врачу, изображение рабочей секции 100 бурава, полученное до введения красителя 160, можно контрастно накладывать на затененное красителем изображение, чтобы определять расположение рабочей секции 100 бурава относительно закупорки 320.
На фиг.16А представлен пример применения красителя 160, не прозрачного для рентгеновского излучения, до преодоления изгиба 161 в закупорке 320. При установлении границ красителем 160 видно, что обнаруженная складка 340 содержит узкий изогнутый просвет, продолжающийся дистально и впереди от сферической головки 122. Оператор будет реагировать на данную конфигурацию сосуда соответствующими действиями по проведению проволоки 120 и вставкой узла 122 приложения усилия как можно дальше в дистальном направлении.
С этой целью, механизм 560 фиксации проволоки разжимают, тогда как механизм 540 фиксации стержня остается зафиксированным, и проволоку 120 вручную поступательно перемещают в дистальном направлении и, при необходимости, поворачивают, пока проволока 120 не проникнет в складку 340 настолько далеко в дистальном направлении, насколько возможно, как показано in vivo на фиг.16В. Сопровождающее манипулирование управляющим устройством 500 бурава пояснялось выше и не повторяется.
Для прохождения через дополнительную дистально расположенную закупорку 320, рабочей секцией 100 бурава следует действовать снова в последовательности двухфазных шагов процесса переползания. На фиг.17А показано in vivo аркообразное изгибание дуги 110 с созданием асимметричного радиального расширения, и на фиг.17В представлена продольно выпрямленная и расправленная дуга 110, где узел 122 приложения усилия показан дистально прошедшим через и за закупорку 320. Таким образом, рабочая секция 100 бурава внедрила еще одно углубление 145 наконечника и еще одно углубление 155 свода дуги. Для прохождения сквозь более плотную и длинную закупорку 320 могут потребоваться дальнейшие поочередные шаги процесса переползания, в дополнение к единственному вышеописанному шагу.
Бурав 1000 для прохождения закупорок может выполнять функцию направляющей для дополнительных хирургических инструментов, применяемых в ходе одновременных и/или последующих процедур. Например, проволока 120 может расположиться дистально от закупорки 320, как показано на фиг.18, после чего стержень 130 извлекают в проксимальном направлении, чтобы проволока 120 выполняла функцию направителя для поддержки ангиопластического катетера, при желании, баллона с эндопротезом сосуда или без него.
Для расположения узла 122 приложения усилия и проволоки 120 дистально снаружи и дальше от закупорки 320 механизм 560 фиксации проволоки разжимают, тогда как механизм 540 фиксации стержня остается зафиксированным. Затем проволочный направитель 120 при проталкивании в дистальном направлении вовнутрь сосуда 300 глубже дистально проходит за закупорку 320, как показано на фиг.18.
Затем рабочую секцию 100 бурава извлекают в состояние ех vivo проксимальным поступательным перемещением на всю длину стержня 130. Для этой цели проксимальный участок проволочного направителя 120 удерживают неподвижным в одной руке, тогда как другая рука отводит управляющее устройство 500 бурава и, вследствие этого, также стержень 130 проксимальным поступательным перемещением отверстия 113 в опорной полке на всю длину стержня 130. Это осуществляется после того, как механизм 560 фиксации проволоки разжимают, и механизм 540 фиксации стержня фиксируют.
В альтернативной процедуре для перемещения стержня 130 в дистальном направлении в состояние ex vivo оператор может предпочесть разжим как механизма 540 фиксации стержня, так и механизма 560 фиксации проволоки, и тогда перемещают управляющее устройство 500 бурава проксимальным поступательным перемещением на всю длину стержня 130 и проволоки 120, после чего стержень 130 поступательно перемещают в проксимальном направлении относительно проволоки 120, которая остается на месте.
Усовершенствования
Во время работы буравом 1000 для прохождения закупорок можно предотвращать проксимальный кровоток применением ангиопластического катетера 180 с баллоном 181, расположенным вокруг стержня 130, как показано на фиг.19А. При необходимости можно применить наполнение баллона для симметричного расширения сосуда 300 и для расширения входа в дистальную трещину в складке 340. Ангиопластический катетер 180 может также, при желании, служить опорой эндопротезу сосуда (стента) для использования после операции.
Поскольку имеется возможность вставки дополнительных лечебных инструментов в положение in-vivo по стержню 130 и по рабочей секции 100 бурава, то становится излишним проксимальное отведение стержня 130 в состояние ex vivo после завершения процедуры с применением бурава 1000 для прохождения закупорок. Поэтому, после применения бурава 1000 для прохождения закупорок, рабочую секцию бурава оставляют на месте in vivo, и дополнительный лечебный инструмент поступательно перемещают в состояние in-vivo поверх рабочей секции бурава и располагают для дальнейшего лечения в состоянии in-vivo.
В случае сильной закупорки дугу 110 можно изгибать до выбранной степени и поворачивать вокруг проволоки 120 для врезания в тромбозный материал закупорки и его дробления. Однако, в ходе работы буравом 1000 для прохождения закупорок, возможна ситуация, что, в случае инфаркта миокарда, или MI, обусловленного полной закупоркой, эмболические частицы могут высвобождаться в дистальную артериальную структуру. Для предотвращения данной ситуации желательно предусмотреть аспирацию данных эмболических частиц. Аспирацию можно обеспечить через стержень 130 или любой другой канал или полость, допускающий(щую) движение текучих сред от аспирационного отверстия канала, расположенного in vivo у или вблизи дистального конца бурава 1000 для прохождения закупорок, и ведущий(щую) к вытяжному выходному отверстию канала, расположенному ех vivo.
На фиг.19В изображен всасывающий канал 139 с всасывающим впускным отверстием 1391, находящимся вблизи дистального участка рабочей секции 100 бурава, выполненным с подходящей конфигурацией и расположенным для выпуска любых смещенных остатков закупорки в вытяжное отверстие, не показанное на фиг.19В, но расположенное ех vivo.
Механизм изгибания и расправления
Несмотря на вышеприведенное описание механизма, обуславливающего двухшаговую последовательность операции рабочей секции 100 бурава вместе с процессом изгибания и расправления дуги 110, ниже данный механизм схематично описан более детально, так как последовательные формы кривой дуги во время состояния расправления не соответствуют, в обратном направлении, последовательным формам кривой дуги во время состояния изгибания дуги 110.
В предпочтительном варианте осуществления 1000, схематично показанном на фиг.20А, при нахождении в расправленном состоянии, дуга 110 является аналогом плоской пружины, консольно установленной в стержень 130 на рельефном участке 114 и содержащей опорную полку 112 на свободном конце. Чтобы согнуть дугу 110 в аркообразное состояние, стержень 130 поступательно перемещают в дистальном направлении к узлу 122В приложения усилия, который удерживается на месте застопоренной проволокой 120, расположенной с упором в закупорку 320, как показано на фиг.20В.
Выше пояснялось, что дуга 110 выполнена с сужением, и спинка 117 дуги характеризуется ослаблением жесткости в дистальном направлении, то есть снижением жесткости пружины или коэффициента жесткости пружины, с минимальным значением данного параметра вблизи опорной полки 112. Поэтому, когда дуга испытывает нагрузку на изгиб, первым изгибается «более мягкий» дистальный концевой участок, и после него изгибаются проксимальные участки спинки 117 дуги, и тем самым спинка 117 дуги закручивается для постепенного округления в ходе нетравматического изгибания в ткань закупорки.
На фиг.20В усилие прилагается к опорной полке 112, показанной на фиг.20А, и дуга начинает аркообразно искривляться под действием приложенного изгибающего момента в продолжение плавного и постепенного нетравматического движения изгибания в ткань закупорки в складке 340. Одновременно сферическая головка 122В формирует закрепление ТА наконечника, которое внедряется в углубление 141 наконечника, и выпуклая поверхность дуги 110 формирует закрепление АА дуги, которое внедряется в углубление 151 свода дуги.
В дальнейшей фазе прогиба кривой дуги, показанной на фиг.20С, дуга 110 дополнительно закрутилась и вкатилась в закупорку 320, с более глубоким закреплением выпуклой поверхности в ткани закупорки, увеличением глубины закрепления АА дуги и углубления 151 свода дуги и асимметричным расширением сосуда 300 радиально наружу. Процесс изгибания дуги заканчивается, когда опорная полка 112 практически упирается в дистальный конец стержня 130.
При изгибе до аркообразной формы, показанной на фиг.20С, закрепление АА дуги и углубление 151 свода дуги расположено дистальнее относительно закрепления ТА наконечника и углубления 141 наконечника. Однако закрепление дуги и углубление свода дуги может иметь протяженность, выбранную из группы, состоящей из протяженности, продолжающейся в проксимальном и дистальном направлениях относительно закрепления наконечника и углубления наконечника, протяженности, продолжающейся в проксимальном направлении относительно закрепления наконечника и углубления наконечника, и протяженности, продолжающейся в дистальном направлении относительно закрепления наконечника и углубления наконечника.
Таким образом, дуга 110 соответственно конструктивно выполнена с коэффициентом жесткости пружины, постепенно снижающимся в дистальном направлении для прогиба под действием большего усилия у хвостовика дуги и под действием меньшего усилия у опорной полки, чем обеспечивается регулируемая атравматическая кривая прогиба дуги. Поэтому углубление свода дуги от выпуклой поверхности больше и более выражено, чем углубление наконечника.
При возврате в расправленное состояние, как показано на фиг.20D, стержень 130 удерживается на месте, а проволока 120 постепенно высвобождается в дистальном направлении с ослаблением изгибающего момента, прилагаемого к дуге 110. Выпуклая поверхность спинки 117 дуги, которая формирует закрепление АА дуги и остается внедренной в углубленное углубление 151 свода дуги, становится точкой опоры, из которой опорная полка 112 развертывается в дистальном направлении. В данное время дуга 110 представляет активный дистальный участок протяженностью от закрепления АА дуги или углубления 151 свода дуги до закрепления ТА наконечника или углубления 141 наконечника, в противоположность состоянию изгибания, в котором протяженность была от рельефного участка 114 до закрепления ТА наконечника до углубления 141 наконечника. Поэтому форма искривления расправляющейся дуги 110 отличается от формы в любом состоянии, образованном во время изгибания.
Таким образом, дистальный участок спинки 117 дуги постепенно развертывается в продолжение плавного нетравматического движения для дистального проталкивания узла 122 приложения усилия во вновь вскрытую и углубленную складку 340. Хотя дистальный участок дуги 110, продолжающийся между первым закреплением АА дуги или углублением 151 свода дуги и закреплением ТА наконечника или углублением 141 наконечника, высвобождается для выпрямления, проксимальная опора дуги 110 постепенно отодвигается назад в проксимальном направлении к рельефному участку 114, которого достигает после возврата в полностью расправленное состояние. Это позволяет узлу 122 приложения усилия проволоки 120 внедряться дистально дальше в складку 340, как показано in vivo на фиг.14С.
В дополнение, регулируемые порог усилий, предел длины шага и кривая прогиба дуги 110 обеспечивают регулирование радиального расширения и усилий, прилагаемых к закупорке и к сосуду 300.
Механизм, по которому действует рабочая секция бурава, настроен на изгибание спинки 117 дуги до полностью регулируемых форм кривых прогиба и на внедрение сначала наконечника (МТ, 123) и затем выпуклой поверхности для создания нетравматического движения качения, необходимого для радиального расширения наружу, и для дистального поступательного перемещения. Другими словами, рабочая секция 100 бурава поступательно перемещается, по существу, аксиально и дистально в сосуд 300 в ходе поочередного движения переползания, вызываемого каждой поочередной последовательностью операции.
И, наконец, механизм работы предусматривает отсутствие в рабочей секции 100 бурава свободно направленных травматических концевых участков. Спинка 117 дуги имеет выпуклую поверхность, продолжающуюся радиально наружу и от проволоки 120, однако хвостовик 115 дуги прикреплен к стержню 130, и опорная полка 112 закреплена на проволоке 120 посредством отверстия 113 в опорной полке не только для непрерывного регулирования прогиба дуги 110, но, тем самым, обеспечивая, чтобы узел 122 приложения усилия был единственным свободно направленным концевым участком рабочей секции 100 бурава.
Альтернативные варианты осуществления
На фиг.21А-21С представлены виды спереди дуги 110 и дистального конца стержня 130, где изображены альтернативные варианты осуществления конфигурации и способа, применяемых для фиксации хвостовика 115 дуги к стержню 130. Хвостовик 115 дуги имеет надлежащую форму для соответствия функциональным требованиям, предъявляемым технологиями изготовления, применяемыми для фиксации дуги 110 к стержню 130. Например, для закрепления хвостовика 115 дуги заклепками 165 к стержню 130, как показано на фиг.21А, для хвостовика 115 дуги достаточно подходит прямоугольная форма 170, но достаточной будет форма 171 песочных часов, показанная на фиг.21С. Однако форма 171 песочных часов, показанная на фиг.21В для фиксации хвостовика 115 дуги к стержню 130 может обеспечивать лучший захват для закрепления с помощью стягивающей трубки 116. Тем не менее, могут быть выбраны другие геометрии формы хвостовика 115 дуги, чтобы лучше соответствовать другим средствам крепления химическим или физическим соединением, например, обжимом или каким-либо видом пайки, пайки твердым припоем, сваркой и диффузионным соединением. Фактически выбор форм хвостовика 115 дуги и средства фиксации хвостовика 115 дуги к стержню 130 не ограничен.
На фиг.22А и 22В изображен альтернативный вариант осуществления дуги 110, показанной на виде снизу. Вместо наличия планарной опорной полки или плоской опорной полки 112, как показано на фиг.2 и 3, альтернативный вариант осуществления содержит искривленную опорную полку 112Т, характеризующуюся углом наклона. Когда расправленную и выпрямленную дугу 110 поворачивают, опорная полка 112Т действует как сегмент винтовой резьбы с углом наклона для резьбового зацепления закупорки 320 и прохождения сквозь нее.
Чтобы дополнительно повысить возможности дуги 110 либо с планарной опорной полкой 112, либо с изогнутой опорной полкой 112Т, периметр 112Р опорной полки может быть выполнен в виде резца с множеством, но, по меньшей мере, с одной режущей кромкой 112С, как показано на фиг.22В. При повороте изогнутая опорная полка 112Т может вырезать закупорку 320. Следует отметить, что тип опорной полки, либо планарной опорной полки 112, либо изогнутой опорной полки 112Т, не влияет на регулируемые характеристики дуги 110.
Как пояснялось выше, проксимальное отведение стержня 130 достигалось сдвиганием отверстия 113 в опорной полке дуги 110 по проволоке 120. Данный способ отведения подразумевает, что внутренний диаметр отверстия 113 в опорной полке должен быть достаточно большим, чтобы допускать прохождение через данное отверстие самого широкого размера проволоки 120. В предпочтительном варианте осуществления узел 122 приложения усилия имеет диаметр шире внутреннего диаметра отверстия 113 в опорной полке. Однако для проникания в тонкий сосуд 300 целесообразно выдерживать как можно меньшие размеры дуги 110, опорной полки 112 и отверстия 113 в опорной полке.
Для дополнительного уменьшения размеров рабочей секции 100 бурава ниже предлагается альтернативная рабочая секция 200 бурава, с которой, при желании, стержень 130 можно выводить из зацепления с проволокой 120 и извлекать в проксимальном направлении ex vivo, даже несмотря на то, что внутренний диаметр отверстия 113 в опорной полке меньше, чем самый широкий размер стержня 130 и узла 122 приложения усилия.
На фиг.23А-23С изображен дистальный участок рабочей секции бурава в форме варианта 200 осуществления, с узлом 122 приложения усилия и опорной полкой 112 отличающегося типа, и с уменьшенными размерами. На фиг.23А-23С изображена планарная опорная полка 112, но то же самое применимо к изогнутой опорной полке 112Т с, по меньшей мере, одной режущей кромкой 112С или без нее.
Как показано на фиг.23А, узел 122 приложения усилия выполнен с ограниченной по длине охватываемой винтовой резьбой 122М, расположенной на дистальном конце проволоки 120, вместо сферической головки 122В, показанной на фиг.2 и 3. Опорная полка 112, показанная на фиг.23В, выполняет функцию охватывающей винтовой резьбы 113F или может быть снабжена данной резьбой вместо цилиндрического отверстия 113 в опорной полке для вмещения в нее охватываемой винтовой резьбы 122М при сопряжении и при выдвижении через нее.
Для выдвижения охватываемой винтовой резьбы 122М в дистальном направлении наружу от опорной полки 112, как показано на фиг.23С, охватываемую винтовую резьбу 122М поворачивают и вводят в резьбовое зацепление, пока она не выходит из него в дистальном направлении. Затем, после дистального размещения снаружи и на расстоянии от опорной полки 112, охватываемая винтовая резьба 122М будет действовать как узел 122 приложения усилия, когда проволока 120 подтягивает опорную полку 112. При дистальном поступательном перемещении стержня 130 относительно неподвижного узла 122М приложения усилия, охватываемая винтовая резьба 122М будет прилагать усилия изгибающего момента к опорной полке 112 для аркообразного изгибания дуги 110. Следует отметить, что отверстие 113 в опорной полке или охватывающая винтовая резьба 113F имеет минимальный внутренний диаметр, обозначенный w на фиг.23В, тогда как такой же размер w, показанный на охватываемой винтовой резьбе 122М на фиг.23А, меньше, чем максимальный внешний диаметр узла 122М приложения усилия.
Рабочая секция 200 бурава, снабженная дистальной охватываемой винтовой резьбой 122М, действует таким же образом, как рабочая секция 100 бурава со сферической головкой 122В, чтобы создавать углубление 141 для закрепления наконечника, когда дугу изгибают до аркообразной формы. Однако в варианте 200 осуществления охватываемая винтовая резьба 122М имеет уменьшенные размеры по сравнению со сферической головкой 112В. Например, охватываемая винтовая резьба 122М имеет максимальный диаметр в пределах от 1,5 мм до 0,09 мм.
При применении рабочей секции 200 бурава, если оператор желает извлечь стержень 130 в проксимальном направлении в состояние ex vivo, то сначала проволоку 120 поворачивают в направлении поворота открепления винтовой резьбы, пока винтовая резьба 122М не выйдет из зацепления в проксимальном направлении из опорной полки 112 или опорной полки 112Т, как показано на взаимосвязанных фиг.23А и 23В. Затем стержень вытягивают в проксимальном направлении, и тем самым вынуждают дугу 110 слегка изогнуться радиально наружу, чтобы обеспечить возможность сдвига по охватываемой винтовой резьбе 122М и по всей длине проволоки 120, и ее опорным виткам.
Предлагается другой вариант 600 осуществления рабочей секции, требующий ограниченного углового поворота проволоки 120 для высвобождения из опорной полки, обозначенной как опорная полка 112, но также охватывающий опорную полку 112Т.
В первую очередь сделана ссылка на рабочую секцию 100 бурава для более полного подчеркивания различий. На фиг.24А изображено круговое отверстие 113 в опорной полке, доступное для наблюдения в опорной полке 112, когда дугу 110 рассматривают на виде спереди. Этому отверстию соответствует, по существу, сферическая головка 122В, также показанная на виде спереди, представленном на фиг.24В. Аналогичным образом, на фиг.25А изображена опорная полка 112 с овальным отверстием 113OV в опорной полке, и на фиг.25В показан ответный овальный узел 122OV приложения усилия.
Нетрудно понять, что когда главная ось овального узла 122OV приложения усилия надлежащим образом совмещена с главной осью овального отверстия 113ОV в опорной полке, то возможно поступательное перемещение проволоки 120 в опорную полку 112 и сквозь нее. Однако когда главные оси овального узла 122ОV и овальное отверстие 113ОV в опорной полке расположены без взаимного совмещения, например, под прямым углом, как показано на фиг.25С, то предотвращается дистальное поступательное перемещение выдвижения или проксимальное поступательное перемещение извлечения через опорную полку 122. Оператор ОР должен только повернуть проволоку 120 примерно на 90° относительно опорной полки 112 для вывода проволоки 120 из положения фиксации к опорной полке 112 для высвобождения из нее и для извлечения проволоки в проксимальном направлении.
Короче говоря, узел 122 приложения усилия постоянно закреплен на дистальном конце проволоки 120, и узел 122 приложения усилия и отверстие 113 в опорной полке имеют конфигурацию для предоставления либо какой-то одной, либо обеих возможностей прохода узла приложения усилия через отверстие в опорной полке и предотвращения прохода узла приложения усилия через отверстие в опорной полке. Аналогично, узел 122 приложения усилия и отверстие 113 в опорной полке имеют конфигурацию для предоставления обеих возможностей прохода узла 122 приложения усилия через отверстие 113 в опорной полке и предотвращения прохода узла 122 приложения усилия через отверстие 113 в опорной полке. Таким образом, узел 122 приложения усилия фиксируется к опорной полке 112 с возможностью расцепления соединения при управлении с проксимальной стороны.
При желании возможно выполнение очень малого участка 122Т проволоки 120, продолжающегося в дистальном направлении наружу от узла приложения усилия, изображенного в виде выступа 122В на фиг.26, но применимого также к любому узлу 122 приложения усилия. Участок 122Т наконечника способствует совершенствованию закрепления узла 122 приложения усилия в углублении 141 наконечника, созданном в ткани закупорки.
Специалистам в данной области техники очевидно, что настоящее изобретение не ограничено конкретно показанным и изложенным выше материалом. Например, рабочая секция бурава может иметь другие конфигурации, при условии что обеспечено нетравматическое движение качения. Кроме того, рабочая секция 100 бурава, которая содержит, по меньшей мере, один гибкий участок, может содержать большее число таких участков. Аналогично, рабочая секция 100 бурава может содержать, по меньшей мере, один упругий участок. Кроме того, возможен орган управления буравом для автоматического повторения последовательностей операции. Точнее, объем настоящего изобретения определяется прилагаемой формулой изобретения и включает в себя как комбинации, так и подкомбинации различных вышеописанных признаков, а также их варианты и модификации, которые могут быть разработаны специалистами в данной области техники после прочтения вышеприведенного описания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ МАТЕРИАЛА И СПОСОБ ПРИМЕНЕНИЯ | 2011 |
|
RU2539720C2 |
| АДАПТЕР С УБИРАЮЩЕЙСЯ ИГЛОЙ ДЛЯ БЕЗОПАСНОГО ШПРИЦА | 2014 |
|
RU2652748C2 |
| ИНТЕРФЕЙСНЫЙ УЗЕЛ ДЛЯ СОЕДИНЕНИЯ ЭЛЕКТРОХИРУРГИЧЕСКОГО ГЕНЕРАТОРА И ЭЛЕКТРОХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2019 |
|
RU2779494C1 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2559922C1 |
| СШИВАЮЩИЙ ИНСТРУМЕНТ, СОДЕРЖАЩИЙ ПЕРЕСТАВНОЙ СКОБКОПРОДВИГАЮЩИЙ ЭЛЕМЕНТ | 2012 |
|
RU2620918C2 |
| ОСНОВНОЙ УЗЕЛ СИСТЕМЫ ДОСТАВКИ СТЕНТА | 2013 |
|
RU2593055C2 |
| ОСНОВНОЙ УЗЕЛ СИСТЕМЫ ДОСТАВКИ СТЕНТА | 2013 |
|
RU2709269C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С КРУТЯЩИМСЯ УПОРОМ | 2014 |
|
RU2676522C2 |
| СИСТЕМА ЛИОФИЛИЗАЦИИ, РЕСУСПЕНДИРОВАНИЯ И ДОСТАВКИ ЛЕКАРСТВЕННОГО ПРЕПАРАТА И СООТВЕТСТВУЮЩИЕ СПОСОБЫ | 2020 |
|
RU2815573C2 |
| РЕГУЛИРУЕМЫЙ ЭЛЕМЕНТ ЖЕСТКОСТИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2020 |
|
RU2827786C1 |
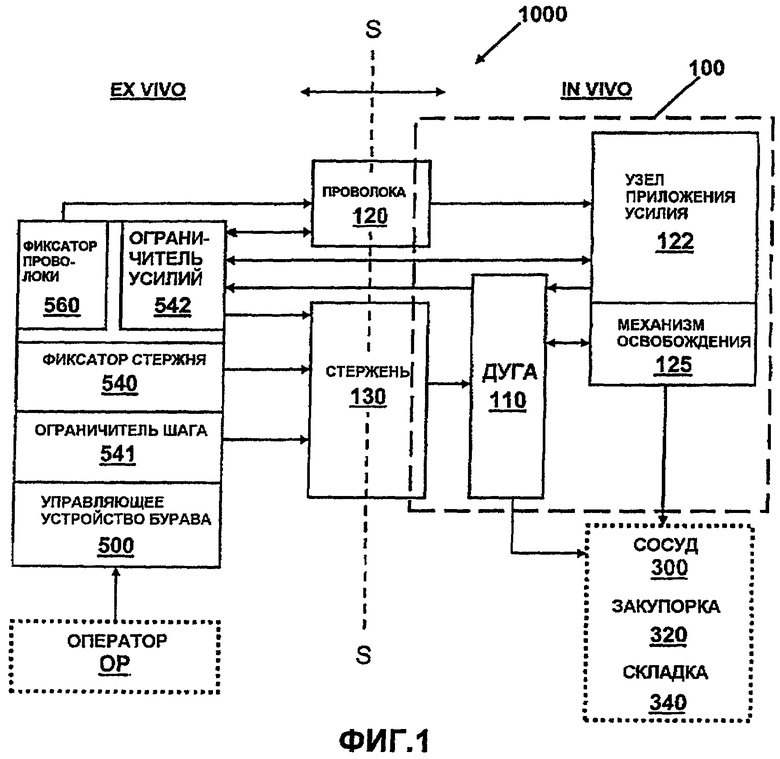
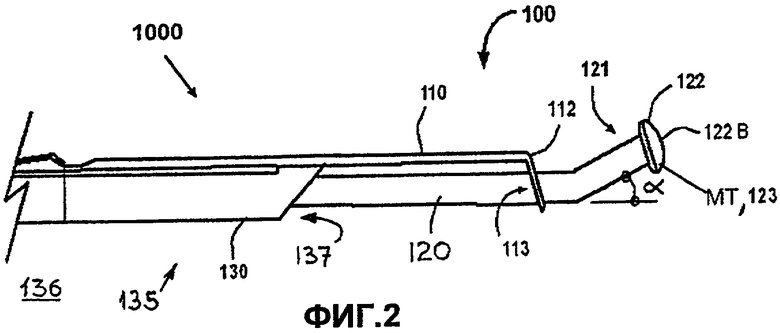
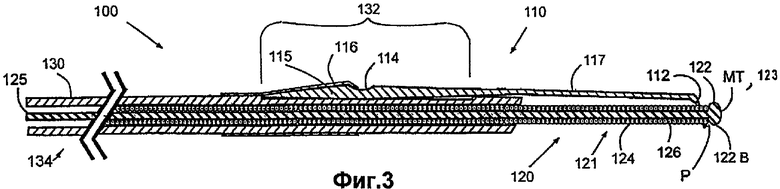
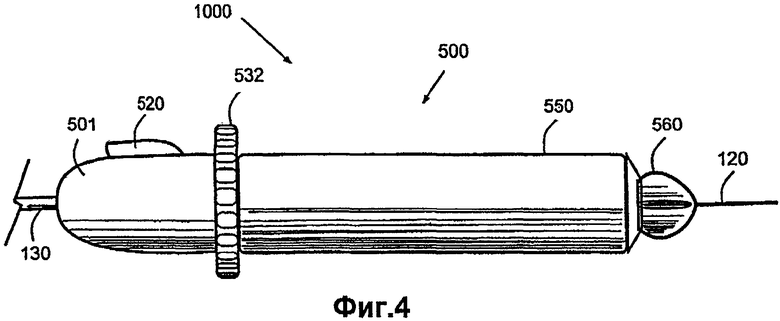
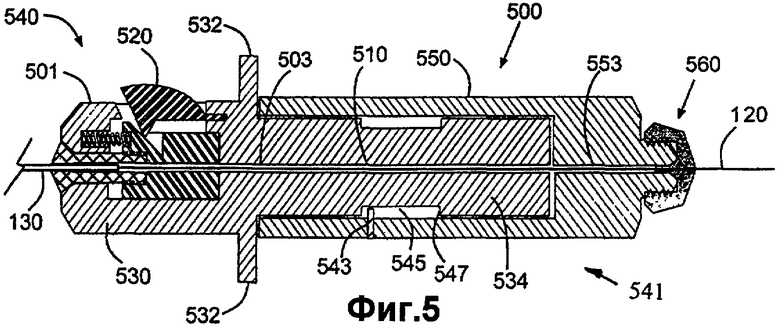
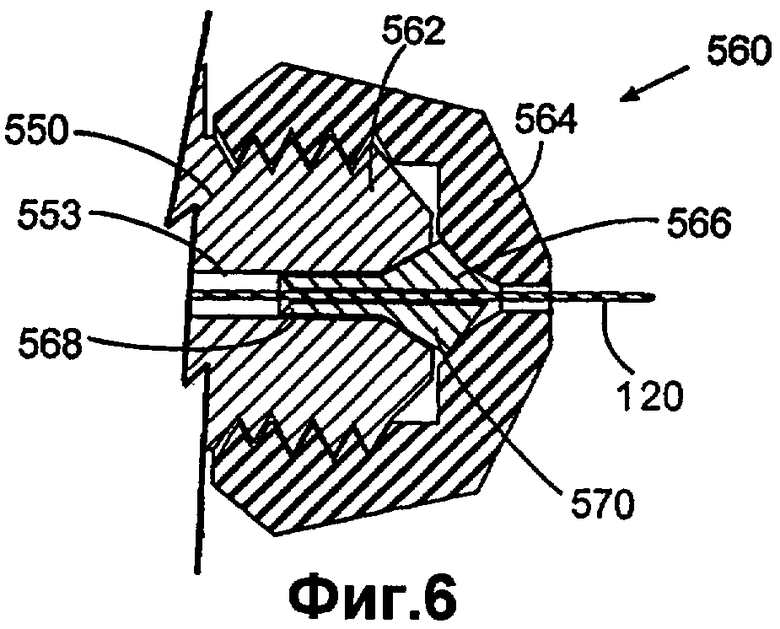
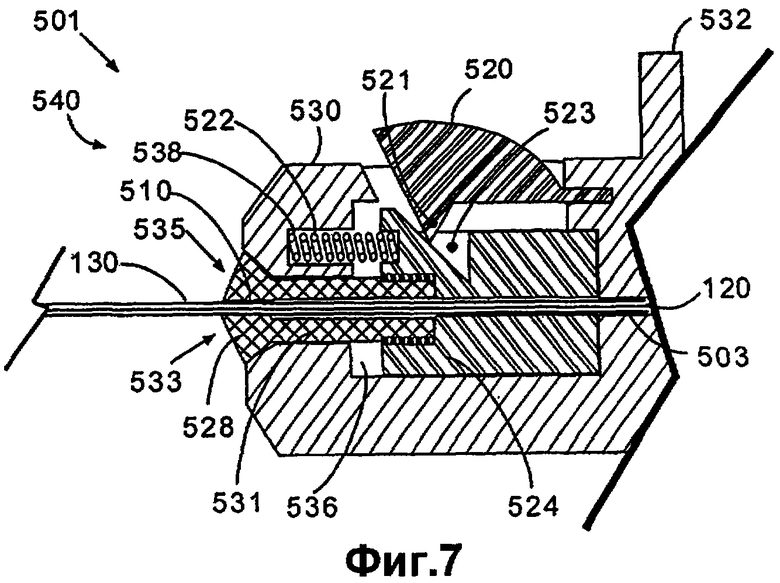
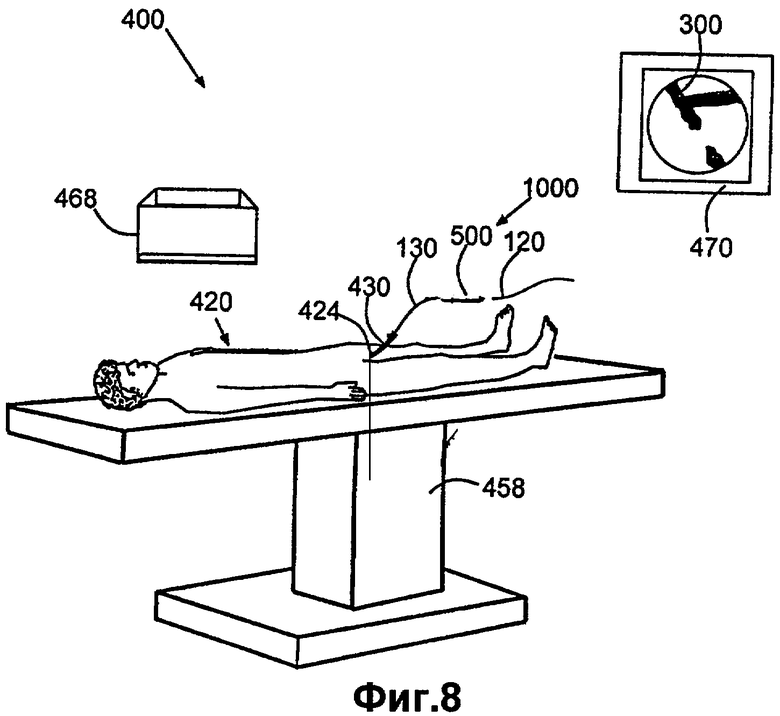
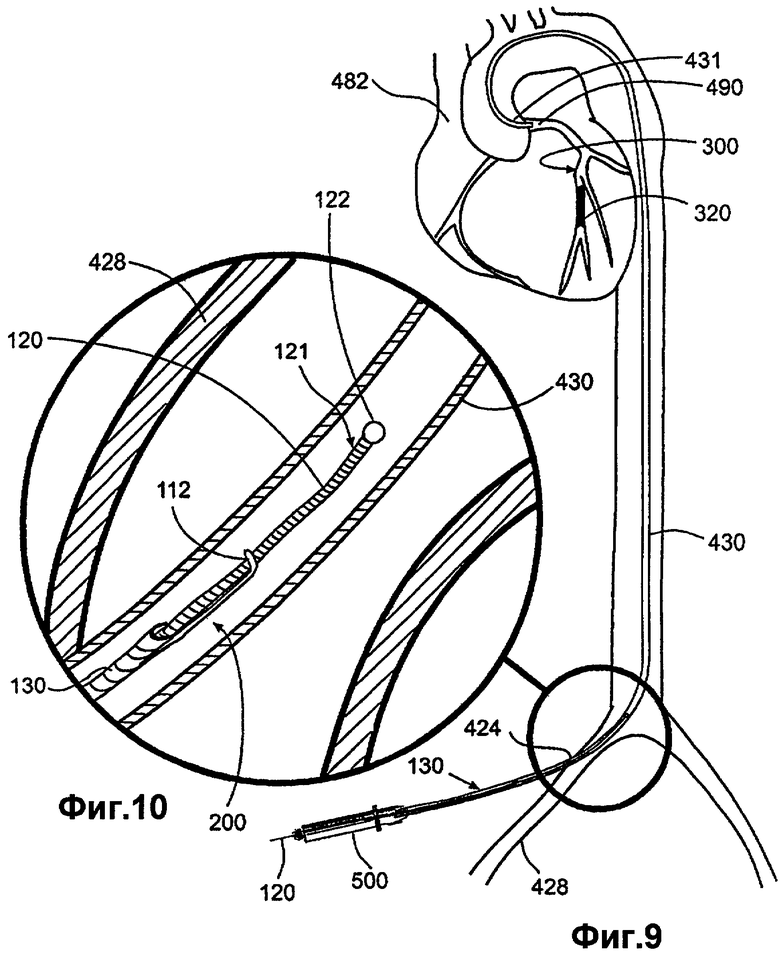
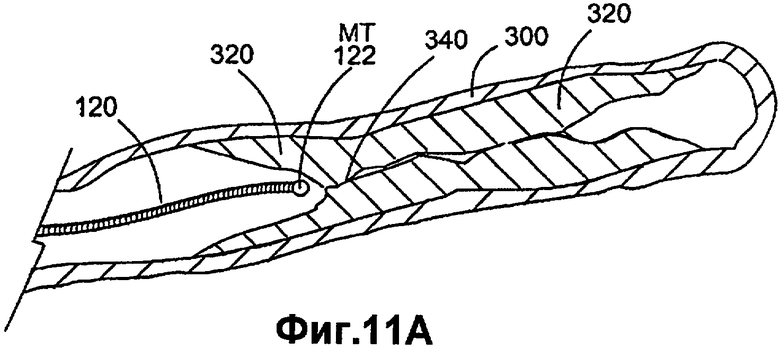
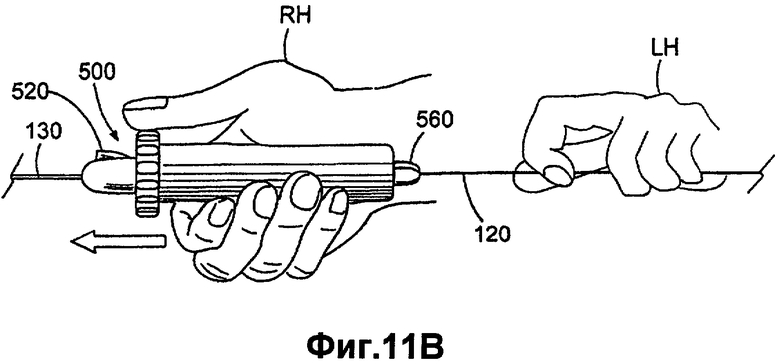
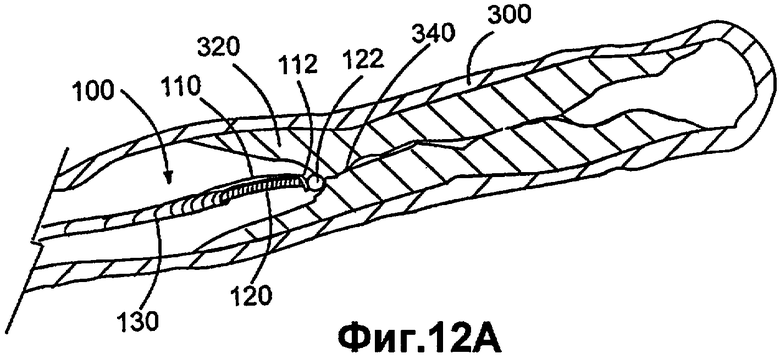
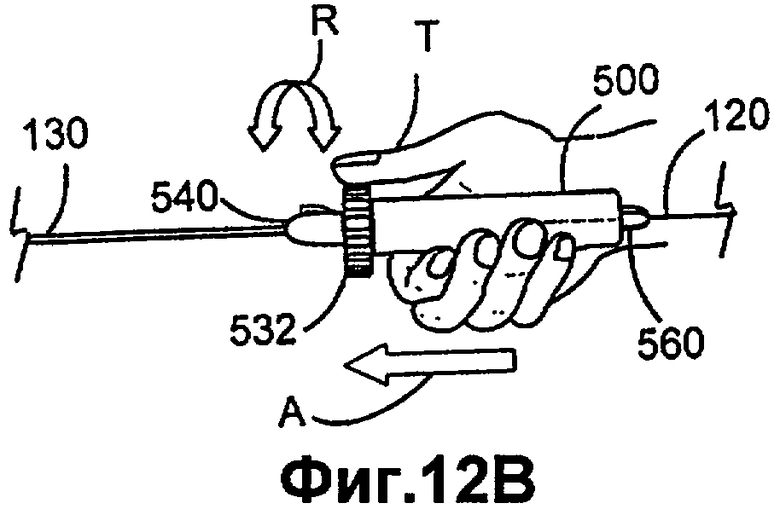
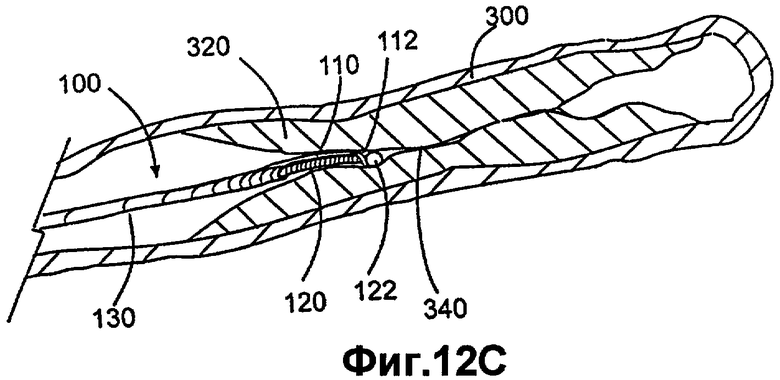
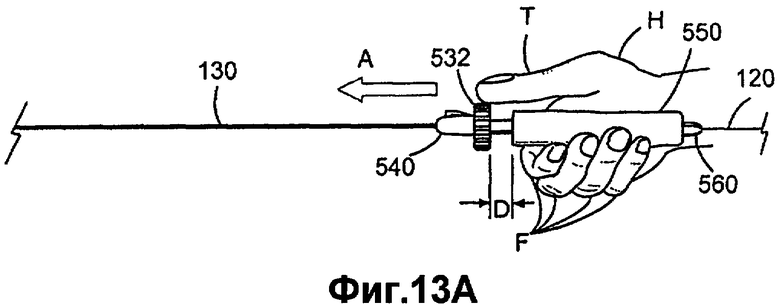
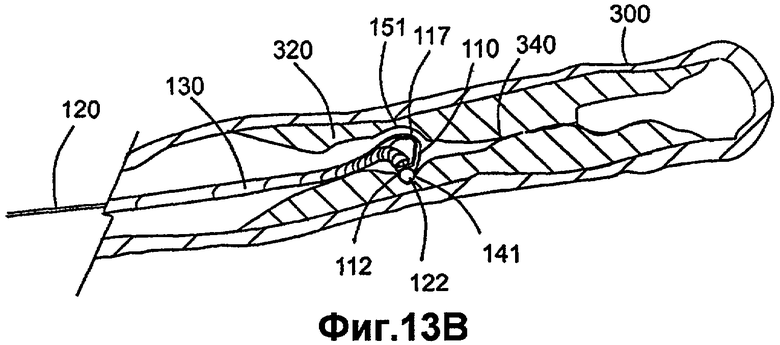
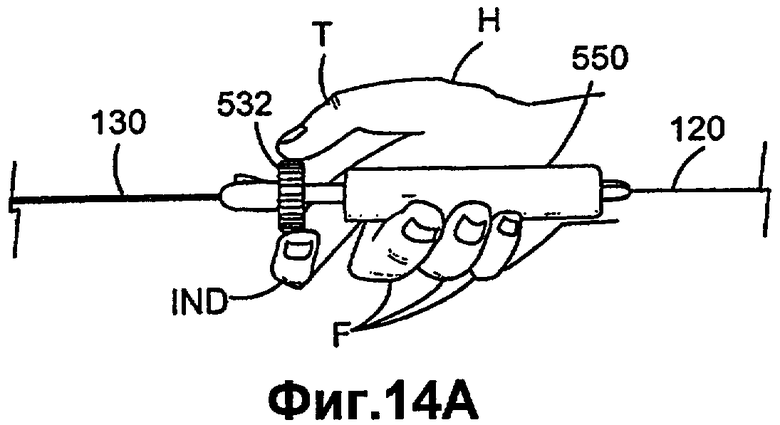
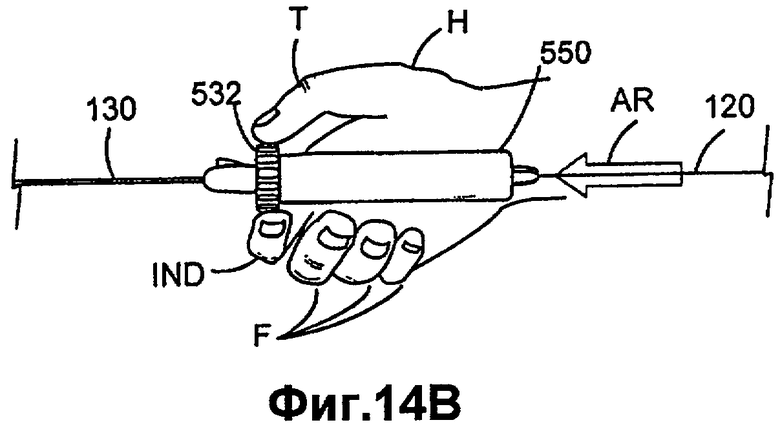
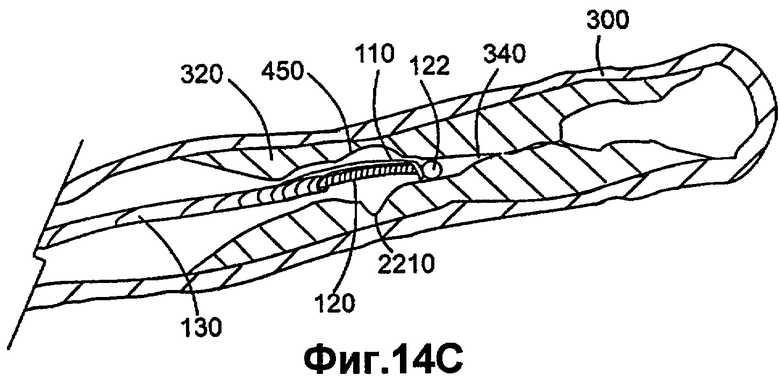
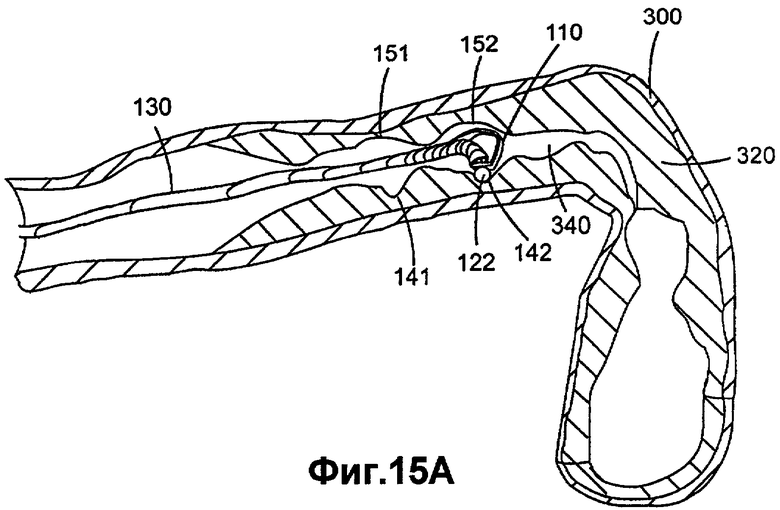
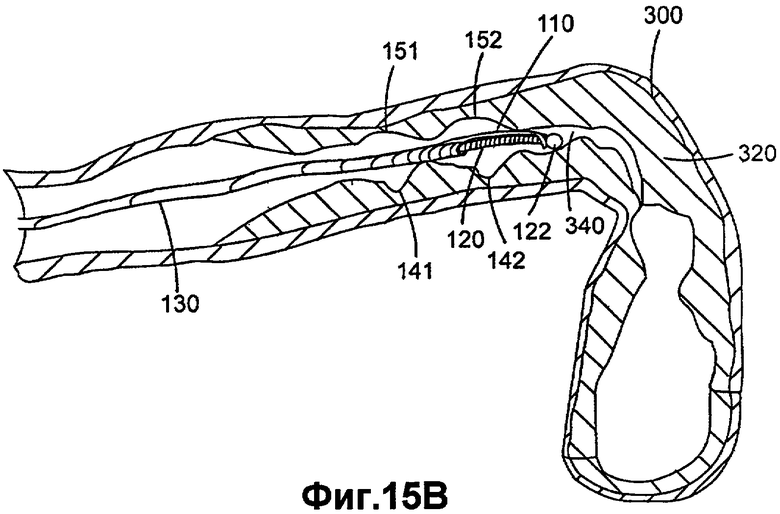
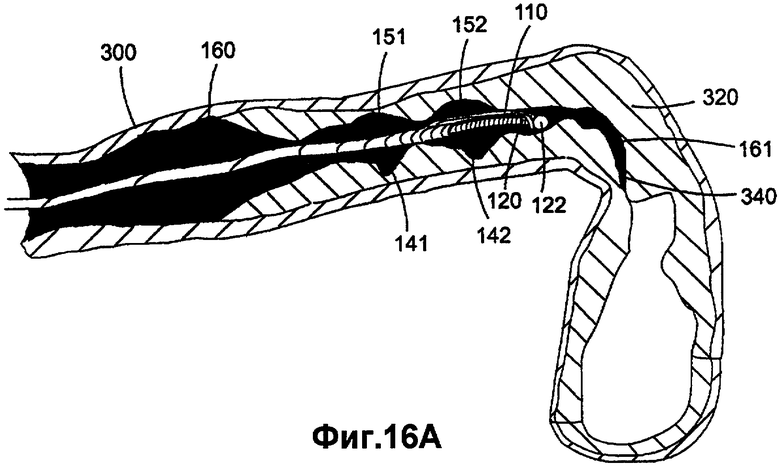

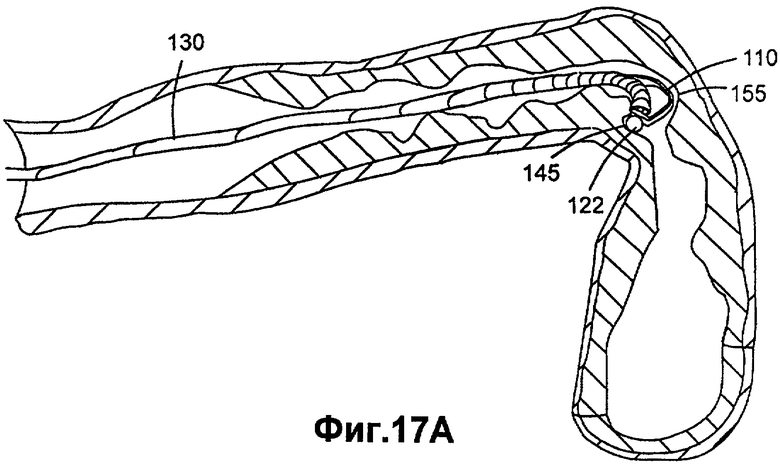
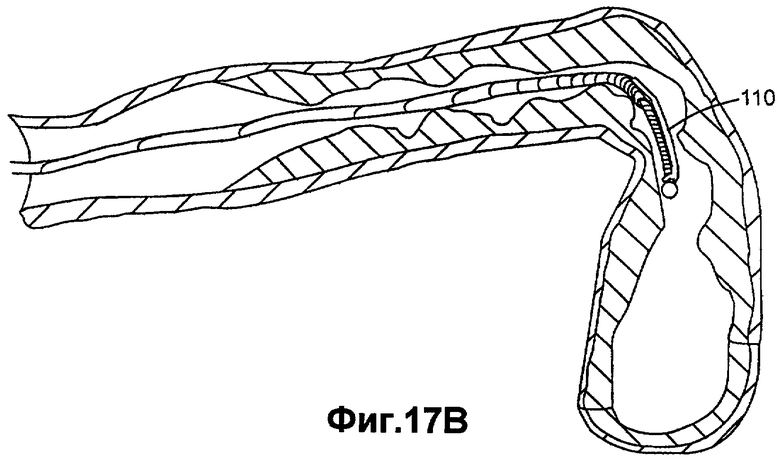
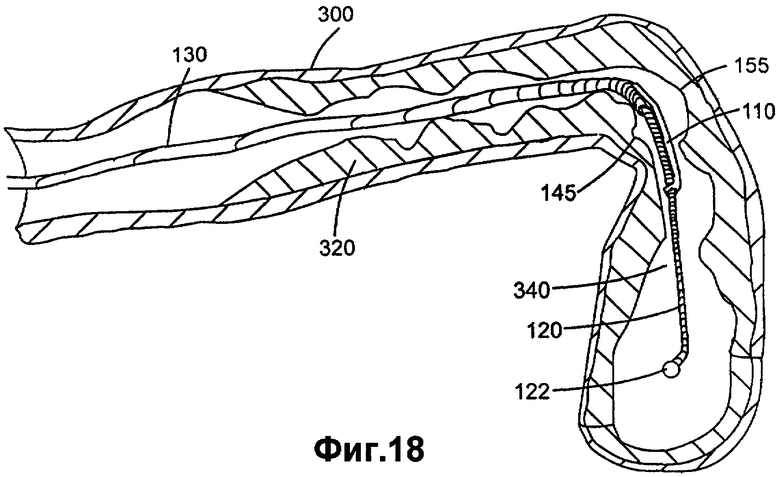
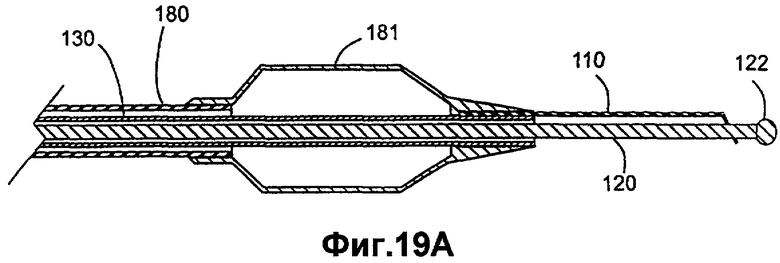
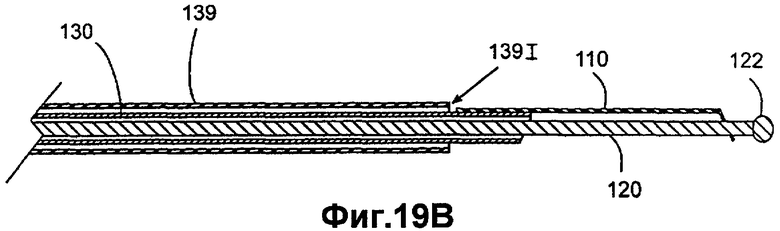
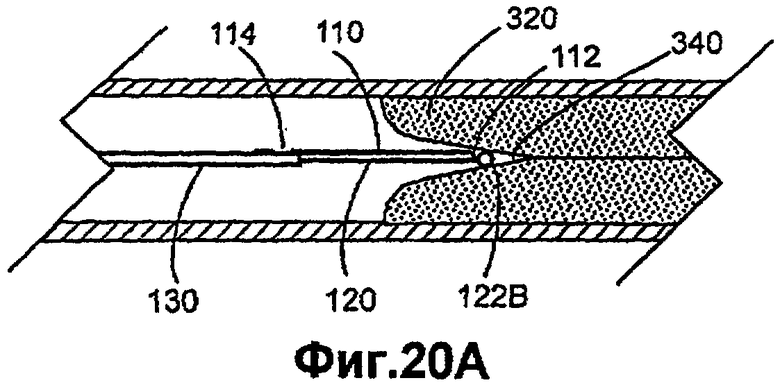
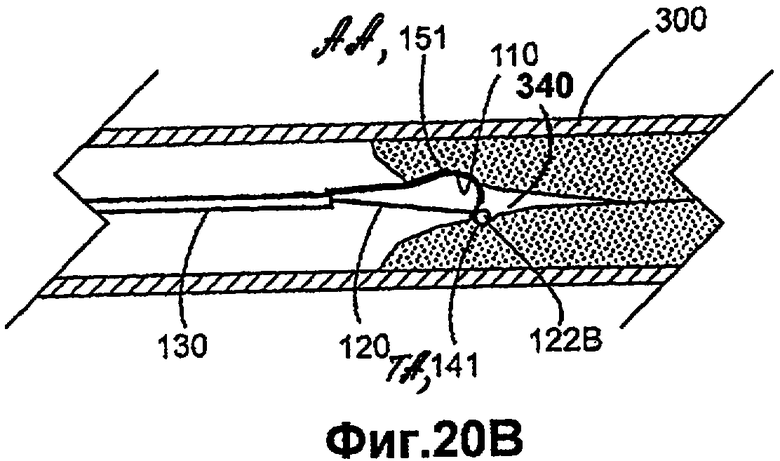
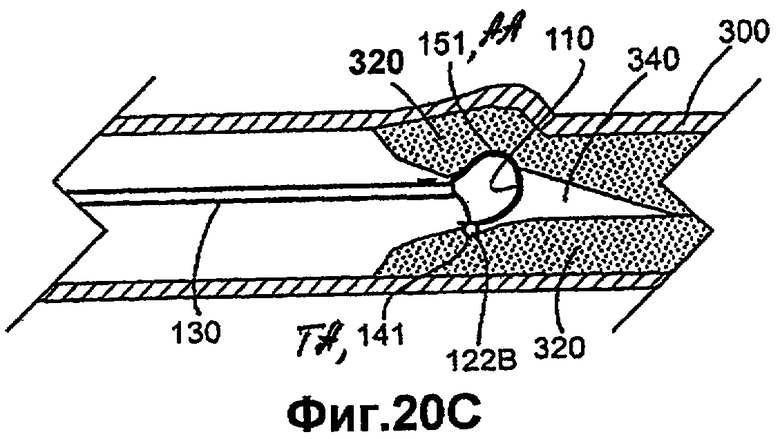
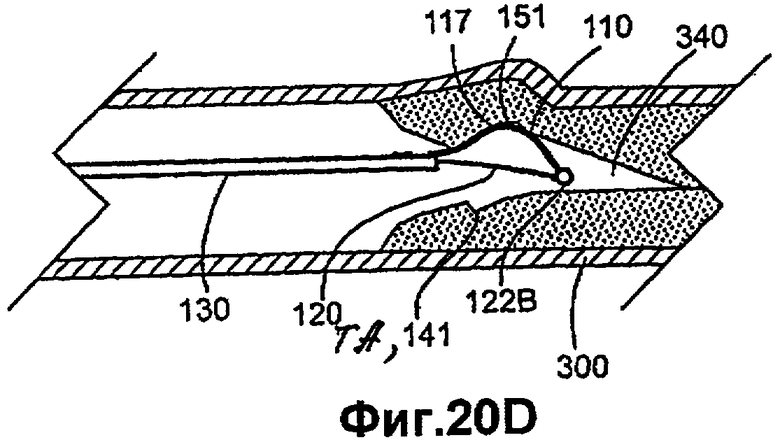
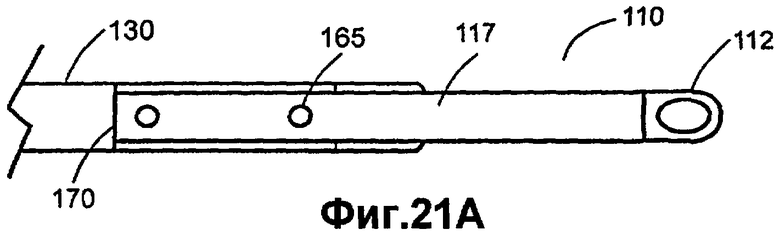
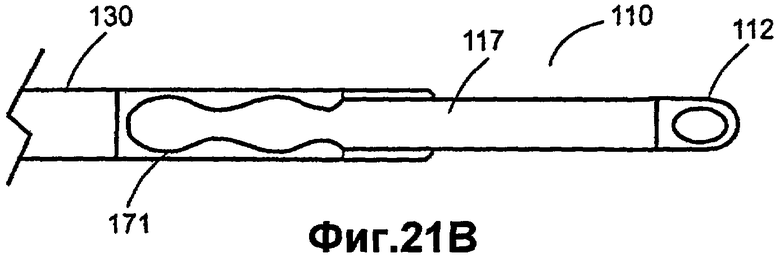
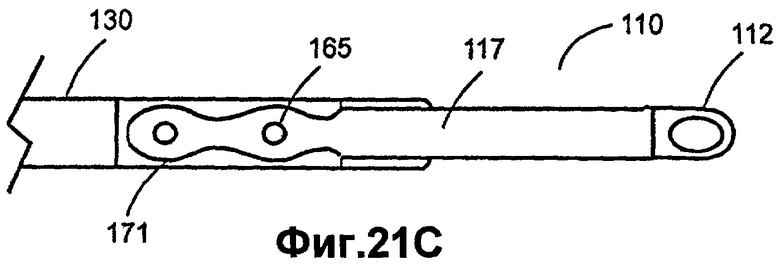
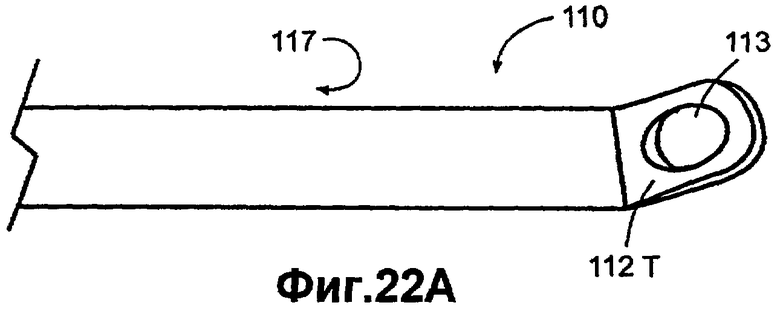
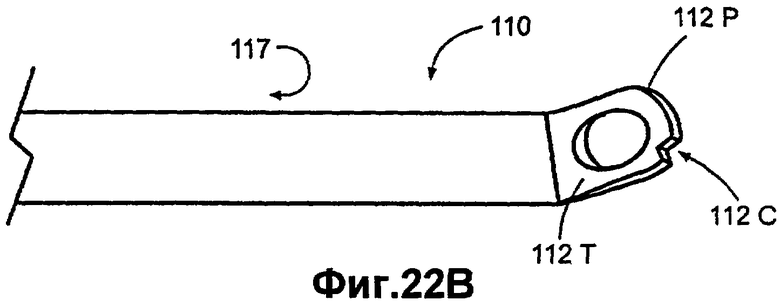
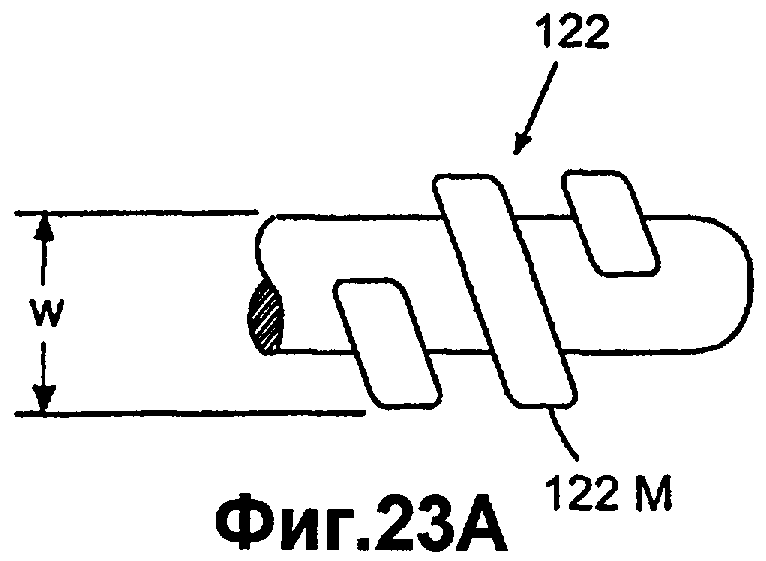
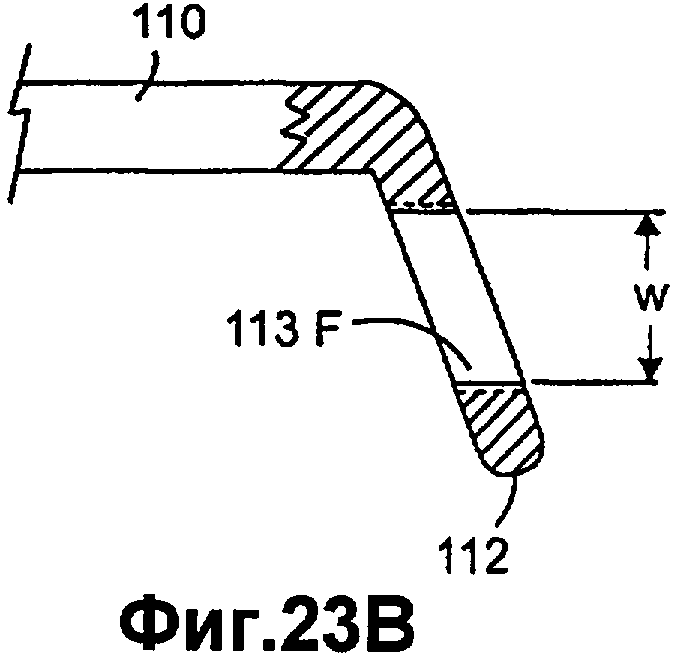
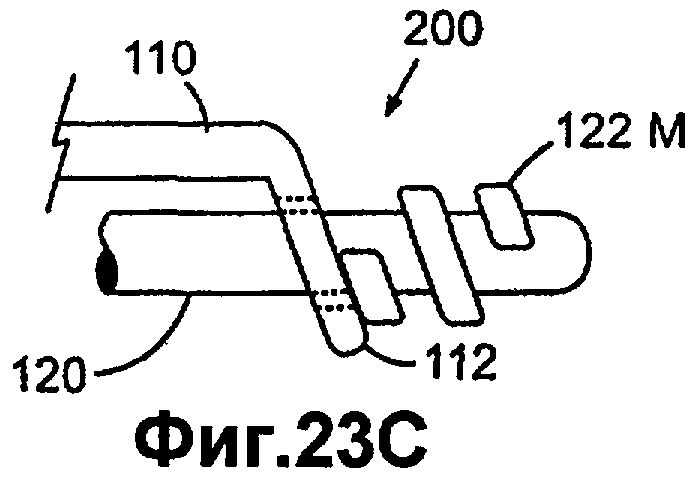
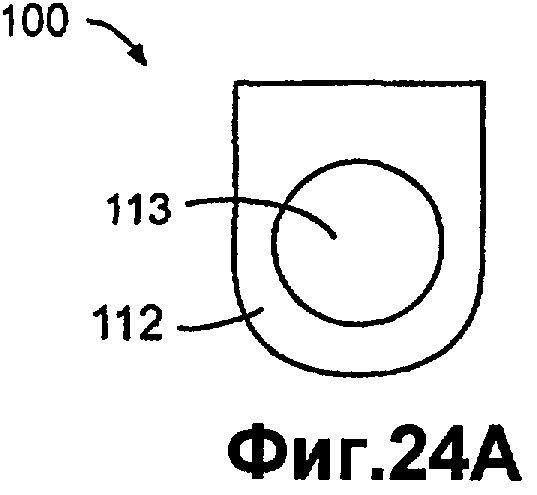
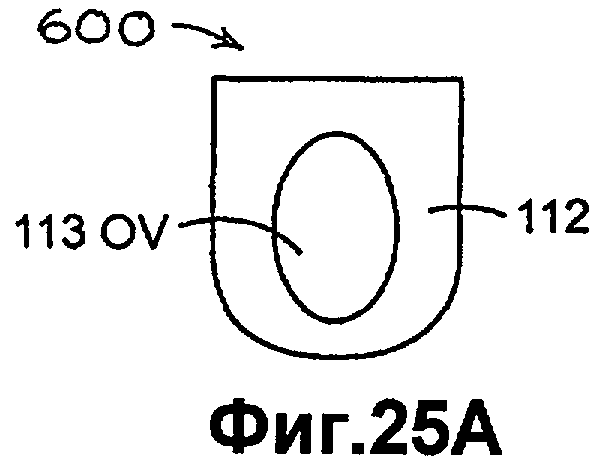
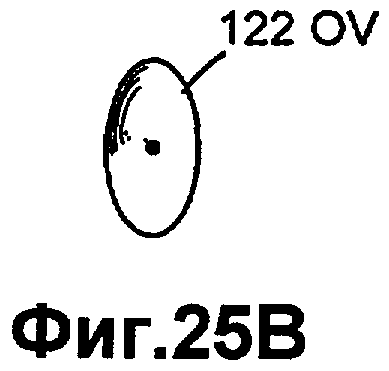
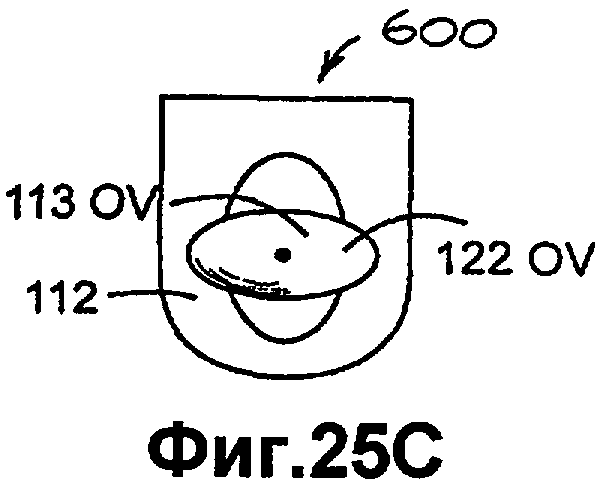
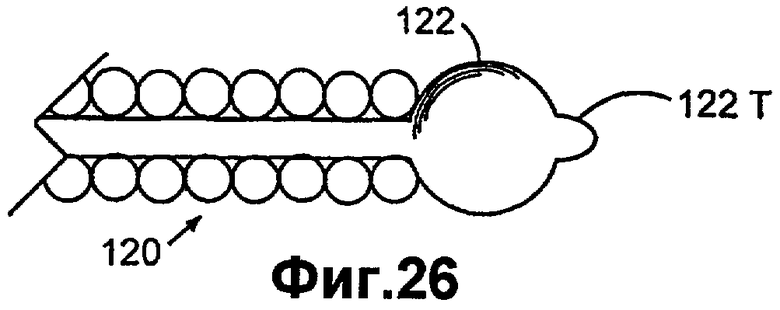
Изобретение относится к медицинской технике, а именно к устройствам и способам для восстановления кровотока в закупоренных кровеносных сосудах и для прохождения закупорок. Бурав для прохождения в дистальном направлении закупорки в сосуде содержит рабочую секцию бурава, имеющую гибкую и упругую дугу, расположенную по касательной к стержню и продольно совмещенную с дистальным концом стержня. Дуга имеет проксимальный конец, жестко соединенный со стержнем, спинку дуги и дистальный конец. Рабочая секция бурава выполнена с возможностью выполнения нетравматической повторяющейся операции в последовательности, содержащей прогиб дуги в аркообразное состояние с расширением радиально наружу и высвобождение в расправленное и выпрямленное состояние, и наоборот. Дуга рабочей секции бурава имеет выпуклую поверхность, когда аркообразно прогнута, и рабочий наконечник. В аркообразном состоянии рабочий наконечник и выпуклая поверхность спинки дуги выполнены с возможностью формирования, соответственно, закрепления наконечника и закрепления дуги в ткани закупорки, которые расположены противоположно друг другу с пространственным разнесением. При этом дуга выполнена с возможностью асимметричного расширения в радиальном направлении наружу. Технический результат изобретения позволяет проходить закупорку вне зависимости от квалификации и умения оператора, а также предотвращает травматическое повреждение сосудов. 2 н. и 23 з.п. ф-лы, 26 ил.
1. Бурав (1000) для прохождения в дистальном направлении закупорки (320) в сосуде (300), имеющем стенки (310) сосуда, содержащий
рабочую секцию (100) бурава, имеющую гибкую и упругую дугу (110), расположенную по касательной к стержню и продольно совмещенную с дистальным концом (135) стержня (130), при этом дуга имеет проксимальный конец (115), жестко соединенный со стержнем, спинку (117) дуги и дистальный конец (112),
при этом рабочая секция бурава выполнена с возможностью выполнения нетравматической повторяющейся операции в последовательности, содержащей прогиб дуги в аркообразное состояние с расширением радиально наружу и высвобождение в расправленное и выпрямленное состояние, и наоборот, при этом дуга рабочей секции бурава имеет выпуклую поверхность, когда аркообразно прогнута, и рабочий наконечник (123); и
в аркообразном состоянии
рабочий наконечник и выпуклая поверхность спинки дуги выполнены с возможностью формирования, соответственно, закрепления (ТА) наконечника и закрепления (АА) дуги в ткани закупорки, которые расположены противоположно друг другу с пространственным разнесением,
при этом дуга выполнена с возможностью асимметричного расширения в радиальном направлении наружу.
2. Бурав для прохождения закупорки по п.1, в котором при возврате в расправленное состояние, следующее за аркообразным состоянием
стержень (130) удерживается на месте, а проволока (120), удерживающая дугу изогнутой, постепенно высвобождается в дистальном направлении, при этом закрепление дуги становится точкой опоры, из которой опорная полка (112) развертывается, и рабочий наконечник поступательно перемещается в дистальном направлении от закрепления дуги на длину одного шага для каждой одиночной последовательности операции.
3. Бурав для прохождения закупорки по п.1, в котором рабочая секция бурава выполнена с возможностью изгибания по регулируемой криволинейной форме прогиба и для обеспечения нетравматического движения качения посредством действия дуги при
а. асимметричном прогибании радиально наружу, и
b. вытягивании до расправленного состояния для
высвобождения энергии дуги для дистального поступательного перемещения рабочего наконечника.
4. Бурав для прохождения закупорки по п.1, в котором рабочая секция бурава выполнена с возможностью свертывания кольцом при изгибании и развертывания при расправлении, по существу, аксиально и дистально от закрепления дуги для продвижения в дистальном продольном протяжении наподобие червяка в процессе движения переползания.
5. Бурав для прохождения закупорки по п.1, в котором стержень (130) с дистальным концом (135) имеет проксимальный конец (134), наружную часть (136) и внутреннюю часть (137), поддерживающие внутри проволоку (120), имеющую проксимальный концевой участок (125) и дистальный концевой участок (121), при этом
рабочая секция (100) бурава содержит гибкую и упругую дугу (110), расположенную с продольным соразмерным совмещением в дистальном направлении с дистальным концом стержня, и спинка (117) дуги расположена между хвостовиком (115) дуги, жестко соединенным с дистальным концом стержня и опирающимся на него, и опорной полкой (112, 112Т, 112ОV), изогнутой относительно спинки дуги и продолжающейся в дистальном направлении от спинки дуги, при этом опорная полка содержит отверстие (113, 113F, 113ОV) в опорной полке, которое выполнено с возможностью прохода проволоки через данное отверстие; и
узел (122, 122 В, 122М, 122ОV) приложения усилия, закрепленный на дистальном конце проволоки, выполненный с возможностью рабочей связи с отверстием в опорной полке и со стержнем для
а. приложения изгибающего момента для изгибания дуги в аркообразное состояние относительно узла приложения усилия, опирающегося на опорную полку, для расширения выпуклой поверхности асимметрично в радиальном направлении наружу, противоположно рабочему наконечнику и с пространственным разнесением с ним; и
b. снятия изгибающего момента и высвобождения дуги в расправленное состояние, когда проволока высвобождена, для поступательного перемещения опорной полкой узла приложения усилия в дистальном направлении относительно закрепления дуги на одну заданную длину шага для каждой одиночной последовательности операции.
6. Бурав для прохождения закупорки по п.5, в котором узел приложения усилия постоянно прикреплен к дистальному концу проволоки, и
узел приложения усилия и отверстие в опорной полке имеют конфигурацию для предоставления одной или обеих возможностей из возможности прохода узла приложения усилия через отверстие в опорной полке и предотвращения возможности прохода узла приложения усилия через отверстие в опорной полке за счет расцепления соединения при управлении с проксимальной стороны.
7. Бурав для прохождения закупорки по п.5, в котором
дуга конструктивно выполнена с коэффициентом жесткости пружины, постепенно снижающимся в дистальном направлении для прогиба под действием большего усилия у хвостовика дуги и под действием меньшего усилия у опорной полки,
упор узла приложения усилия в опорную полку (112) усиливает жесткость дистального концевого участка (121) проволочного направителя (120),
размеры и сужение дуги выбраны так, чтобы обеспечить ей регулируемые заданные формы прогиба с легко прогнозируемым режимом точно определяемых кривых прогиба,
чем обеспечивается регулируемая нетравматическая кривая прогиба дуги.
8. Бурав для прохождения закупорки по п.5, в котором
управляющее устройство (500) бурава расположено проксимально в рабочей связи с рабочей секцией бурава и содержит
общую аксиальную проходную трубку (510), выполненную с обеспечением прохождения через нее проволоки при поступательном движении в двух направлениях и в двух направлениях поворота, и с обеспечением дистального и проксимального извлечения проволоки из нее,
дистальный участок (503) трубки, выполненный с обеспечением прохождения через него стержня при поступательном движении и повороте в двух направлениях и с обеспечением дистального извлечения стержня из него,
два ограничителя усилия, включающих ограничитель (542) усилия проволоки, соединенный с возможностью рабочей связи с проволокой, и ограничитель (542) усилия стержня, соединенный с возможностью рабочей связи со стержнем, выполненные с возможностью регулируемых выбора и настройки заданного порогового предела усилий, прилагаемых к ним, и
шаговый ограничитель, выполненный с возможностью регулируемых выбора и настройки заданной длины шага в дистальном направлении, выполняемого в каждой одиночной последовательности операции, при этом проволока, стержень и два ограничителя усилия выполнены с возможностью управления как независимо, так и в сочетании.
9. Бурав для прохождения закупорки по п.8, в котором управляющее устройство бурава содержит
фиксатор стержня для фиксации стержня с возможностью освобождения относительно управляющего устройства бурава и для ограничения усилия, прилагаемого к стержню, и шаговый ограничитель для дистального продольного перемещения стержня на заданную длину шага;
фиксатор проволоки для фиксации проволоки с возможностью освобождения относительно управляющего устройства бурава и для ограничения усилия, прилагаемого к проволоке; и
управляющее устройство бурава выполнено с возможностью рабочего манипулирования и управления проволокой и стержнем как независимо, так и в сочетании.
10. Бурав для прохождения закупорки по п.5, в котором
в аркообразном состоянии,
спинка дуги имеет выпуклую поверхность, продолжающуюся радиально наружу и от проволоки, и
хвостовик дуги прикреплен к стержню, и опорная полка (122Т) искривлена, чтобы иметь угол наклона, и закреплена на проволоке посредством отверстия в опорной полке для непрерывного регулирования прогиба дуги.
11. Бурав для прохождения закупорки по п.10, в котором
искривленная опорная полка выполнена с возможностью рабочей связи с
а) узлом приложения усилия,
в) отверстием в опорной полке для управляемого удерживания с возможностью освобождения узла приложения усилия,
с) по меньшей мере, одной режущей кромкой (112С), расположенной на периметре (112Р) опорной полки и направленной радиально наружу и от отверстия в опорной полке, за счет чего, по меньшей мере, одна режущая кромка выполнена с возможностью радиального врезания в ткань закупорки.
12. Бурав для прохождения закупорки по п.9, в котором, когда узел приложения усилия выдвинут в дистальном направлении, проксимальное извлечение допускается посредством одного или обоих действий из следующих двух:
выведения отверстия в опорной полке из зацепления с узлом приложения усилия, вытягивания стержня в проксимальном направлении относительно узла приложения усилия и сдвига отверстия в опорной полке по проволоке; и
выведения опорной полки в дистальном направлении из зацепления с узлом приложения усилия и извлечения стержня в проксимальном направлении.
13. Способ обеспечения бурава (1000) для прохождения закупорки для прохождения в дистальном направлении закупорки (320) в сосуде (300), имеющем стенки (310) сосуда, характеризующийся тем, что содержит следующие этапы:
располагают рабочую секцию (100) бурава, имеющую гибкую и упругую дугу (110), расположенную по касательной к стержню и продольно совмещенную с дистальным концом (135) стержня (130), при этом дуга имеет проксимальный конец (115), жестко соединенный со стержнем, спинку (117) дуги и дистальный конец (112),
формируют рабочую секцию (100) бурава для выполнения нетравматической повторяющейся операции в последовательности, содержащей прогиб в аркообразное состояние с расширением радиально наружу в одном направлении и высвобождение в расправленное и выпрямленное состояние, и наоборот, при этом рабочая секция бурава имеет выпуклую поверхность, когда аркообразно прогнута, и рабочий наконечник (123); и,
в аркообразном состоянии
рабочий наконечник и выпуклая поверхность спинки дуги формируют, соответственно, закрепление (ТА) наконечника и закрепление (АА) дуги в ткани закупорки, которые расположены противоположно друг другу с пространственным разнесением,
при этом дуга выполнена с возможностью асимметричного расширения в радиальном направлении наружу.
14. Способ по п.13, в котором дополнительно
при возврате в расправленное состояние, следующее за аркообразным состоянием
стержень (130) удерживается на месте, а проволока (120), удерживающая дугу изогнутой, постепенно высвобождается в дистальном направлении, при этом закрепление дуги становится точкой опоры, из которой опорная полка (112) развертывается, и рабочий наконечник поступательно перемещается в дистальном направлении от закрепления дуги на длину одного шага для каждой одиночной последовательности операции.
15. Способ по п.13, в котором дополнительно формируют рабочую секцию бурава с возможностью изгибания по регулируемой криволинейной форме прогиба и действуют дугой при
а. асимметричном прогибании радиально наружу, и
b. вытягивании до расправленного состояния для высвобождения энергии дуги для дистального поступательного перемещения рабочего наконечника.
16. Способ по п.13, в котором дополнительно
формируют рабочую секцию бурава для свертывания кольцом в дистальном продольном протяжении относительно стержня при изгибании и развертывания при расправлении в выпрямленное состояние для продвижения наподобие червяка, сворачиваясь и разворачиваясь.
17. Способ по п.13, в котором
обеспечивают стержень (130) с расположенным ex vivo проксимальным концом (134), вводимым in vivo дистальным концом (135), наружной частью (136) и внутренней частью (137), поддерживающей внутри проволоку (120) с расположенным ех vivo проксимальным концевым участком (125) и вводимым in vivo дистальным концевым участком (121),
формируют рабочую секцию (100) бурава, содержащую гибкую и упругую дугу (110), расположенную с продольным соразмерным совмещением в дистальном направлении с дистальным концом стержня, и располагают спинку (117) дуги между хвостовиком (115) дуги, жестко соединенным с дистальным концом стержня и опирающимся на него, и опорной полкой (112, 112Т, 112ОV), продолжающейся в дистальном направлении от спинки дуги, при этом опорная полка содержит отверстие (113, 113F, 113ОV) в опорной полке, которое выполнено с возможностью прохода проволоки через данное отверстие; и
удерживают узел (122, 122 В, 122М, 122ОV) приложения усилия на дистальном конце проволоки, при этом узел приложения усилия выполнен с возможностью рабочей связи с отверстием в опорной полке и со стержнем для
а. изгибания дуги в аркообразное состояние при продольном дистальном продвижении стержня относительно узла приложения усилия для расширения выпуклой поверхности сосуда асимметрично в радиальном направлении наружу, и
b. высвобождения дуги в расправленное состояние, когда проволока высвобождена, для поступательного перемещения опорной полкой узла приложения усилия в дистальном направлении относительно углубления свода дуги на одну заданную длину шага для каждой одиночной последовательности операции.
18. Способ по п.17, в котором дополнительно
прикрепляют узел приложения усилия постоянно к дистальному концу проволоки; и
формируют узел приложения усилия и отверстие в опорной полке для предоставления одной или обеих возможностей из возможности прохода узла приложения усилия через отверстие в опорной полке и предотвращения возможности прохода узла приложения усилия через отверстие в опорной полке за счет расцепления соединения при управлении с проксимальной стороны.
19. Способ по п.17, в котором дополнительно
формируют дугу с коэффициентом жесткости пружины, постепенно снижающимся в дистальном направлении для прогиба под действием большего усилия у хвостовика дуги и под действием меньшего усилия у опорной полки,
усиливают жесткость дистального концевого участка (121) проволочного направителя (120) за счет упора узла приложения усилия в опорную полку (112),
выбирают размеры и сужение дуги так, чтобы обеспечить ей регулируемые заданные формы прогиба с легко прогнозируемым режимом точно определяемых кривых прогиба,
чем обеспечивается регулируемая нетравматическая кривая прогиба дуги.
20. Способ по п.17, в котором дополнительно
располагают управляющее устройство (500) бурава проксимально в рабочей связи с рабочей секцией бурава, при этом управляющее устройство бурава содержит
общую аксиальную проходную трубку (510), выполненную с обеспечением прохождения через нее проволоки при поступательном движении в двух направлениях и в двух направлениях поворота и с обеспечением дистального и проксимального извлечения проволоки из нее,
дистальный участок (503) трубки, выполненный с обеспечением прохождения через него стержня при поступательном движении и повороте в двух направлениях и с обеспечением дистального извлечения стержня из него,
два ограничителя усилия, включающих ограничитель (542) усилия проволоки, соединенный с возможностью рабочей связи с проволокой, и ограничитель (542) усилия стержня, соединенный с возможностью рабочей связи со стержнем, выполненные с возможностью регулируемых выбора и настройки заданного порогового предела усилий, прилагаемых к ним, и
шаговый ограничитель, выполненный с возможностью регулируемых выбора и настройки заданной длины шага в дистальном направлении, выполняемого в каждой одиночной последовательности операции, при этом проволока, стержень и два ограничителя усилия выполнены с возможностью управления как независимо, так и в сочетании.
21. Способ по п.20, в котором выполнение управления буравом дополнительно содержит
обеспечение фиксатора стержня для фиксации стержня с возможностью освобождения относительно управляющего устройства бурава и для ограничения усилия, прилагаемого к стержню, и шагового ограничителя для дистального продольного перемещения стержня на заданную длину шага;
обеспечение фиксатора проволоки для фиксации проволоки с возможностью освобождения относительно управляющего устройства бурава и для ограничения усилия, прилагаемого к проволоке; и
формирование управляющего устройства бурава с возможностью рабочего манипулирования и управления проволокой и стержнем как независимо, так и в сочетании.
22. Способ по п.17, в котором
в аркообразном состоянии
формируют спинку дуги с выпуклой поверхностью, продолжающейся радиально наружу и от проволоки, и
удерживают хвостовик дуги у стержня, и искривляют опорную полку (122Т), чтобы иметь углом наклона, и удерживают опорную полку на проволоке посредством отверстия в опорной полке для непрерывного регулирования прогиба дуги.
23. Способ по п.17, в котором дополнительно
располагают, по меньшей мере, одну режущую кромку (112С) на периметре (112Р) опорной полки для направления радиально наружу и от отверстия в опорной полке; и
формируют, по меньшей мере, одну режущую кромку с возможностью радиального врезания в ткань закупорки.
24. Способ по п.21, дополнительно содержащий проксимальное извлечение путем одного или обоих действий из следующих двух:
отводят отверстие в опорной полке в проксимальном направлении относительно узла приложения усилия и сдвигают отверстие в опорной полке по проволоке; и
выводят опорную полку в дистальном направлении из зацепления с узлом приложения усилия, и извлекают стержень в проксимальном направлении.
25. Способ по п.17, в котором
располагают закрепление наконечника противоположно закреплению свода дуги, и
оперируют рабочей секцией бурава таким образом, что углубление свода дуги имеет протяженность, выбранную из группы, состоящей из протяженности, продолжающейся в проксимальном и дистальном направлениях относительно закрепления наконечника, протяженности, продолжающейся в проксимальном направлении относительно закрепления наконечника, и протяженности, продолжающейся в дистальном направлении относительно закрепления наконечника.
| US 4848342 А, 18.07.1989 | |||
| АТЭРОЭКТОМИЧЕСКИЙ КАТЕТЕР ДЛЯ УДАЛЕНИЯ ЗАКУПОРИВАЮЩЕГО МАТЕРИАЛА | 1990 |
|
RU2068239C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЗАКУПОРКИ В СОСУДЕ (ВАРИАНТЫ), СПОСОБ УДАЛЕНИЯ ЗАКУПОРКИ ИЗ СОСУДА, СПОСОБ ОБРАБОТКИ ЗАКУПОРКИ В СОСУДЕ | 1992 |
|
RU2093087C1 |
| УСТРОЙСТВО ДЛЯ ЭНДАРТЕРЭКТОМИИ | 1997 |
|
RU2110225C1 |
| ДИЛАТАЦИОННОЕ УСТРОЙСТВО | 2001 |
|
RU2214184C2 |
| US 5741270 A, 21.04.1998. | |||

