Изобретение относится к области трубопроводного транспорта и может быть использовано для обнаружения местоположения дефектов магистральных и иных трубопроводов, а также врезок в трубопровод. В последнее время в связи со значительным износом магистральных и локальных трубопроводов возникла насущная потребность в технических средствах, позволяющих быстро и с минимальными затратами проводить предварительную диагностику состояния трубопровода и поиск врезок в трубопровод.
Известен способ обнаружения дефектов трубопровода и врезок в трубопровод, включающий измерение магнитной индукции над трубопроводом с одновременным перемещением датчика вдоль трубопровода, выявление участка с дефектом. Раскапывание трубы с последующим визуальным осмотром и контактной диагностикой. При этом измеряют только вертикальную составляющую вектора магнитной индукции, измерения проводят непрерывно в процессе перемещения датчика, отслеживают сильные, более 10%, изменения модуля вертикальной составляющей вектора магнитной индукции над местом сильного изменения магнитной индукции производят повторный проход датчика [Патент РФ №2379579, МПК F17D 5/02].
Недостатком способа является то, что при измерении вектора магнитной индукции имеет решающее значение ориентация датчиков прибора в пространстве. Изменение ориентации датчиков прибора в пространстве вносит сильные паразитные колебания показаний при измерении составляющих вектора магнитной индукции, что негативно сказывается на достоверности результатов обследования.
Недостатком способа является также то, что, этот способ обнаружения дефектов трубопровода, использующий контроль только вертикальной составляющей магнитной индукции над трубопроводом, значительно подвержен влиянию глобальных магнитных полей, а также то, что известный способ предназначен для контроля мгновенных значений изменения магнитной индукции без возможности записи измеряемых значений модуля сигнала и его координат.
Известно устройство, используемое в способе для обнаружения дефектов трубопровода и врезок в трубопровод, содержащее корпус с электронным блоком, при этом электронный блок содержит антенну с вертикально расположенным феррозондовым датчиком на карданной подвеске. [Патент РФ №2379579, МПК F17D 5/02].
Известное устройство имеет ряд недостатков:
- контроль только вертикальной составляющей магнитной индукции над трубопроводом значительно подвержен влиянию глобальных магнитных полей, поля земли и близко расположенных коммуникаций и чувствителен к изменениям положения в пространстве относительно вертикальной составляющей.
- устройство не подвержено автоматизированию вследствие отсутствия в известном устройстве привязки к системе GPS -ГЛОНАСС;
- использование феррозондового датчика для диагностики магнитного состояния магистральных трубопроводов вносит некорректность в результаты обследования, обусловленную узким динамическим диапазоном указанного устройства. Трубопровод в процессе обследования содержит более широкий спектр изменения магнитной индукции. Это приводит к тому, что в определенные моменты работы прибора характеристика настройки смещается под действием внешнего магнитного поля трубопровода и прибор теряет чувствительность и соответственно повышается уровень помех;
- недостатком является также необходимость строго сохранять вертикальное положение антенны для обеспечения помехозащищенности от азимутальной составляющей магнитного поля над обследуемым трубопроводом. На практике при движении оператора не удается исключить колебательные движения антенны. Это в свою очередь вносит помехи от влияния азимутальной составляющей на полезный сигнал.
Наиболее близким к предлагаемому способу по технической сущности и достигаемому эффекту является способ обнаружения дефектов трубопровода и врезок в трубопровод, включающий непрерывное измерение вертикальной составляющей магнитной индукции над трубопроводом и вдоль него и выявление участка трубопровода с дефектом или с врезкой, определение градиента модуля вертикального вектора магнитной индукции с получением магнитограммы, в последующем производят запись считываемой магнитограммы на твердотельную (внешнюю) память, при этом наличие участка трубопровода с дефектом или врезкой определяют по плавному возрастанию или убыванию магнитограммы в зависимости от направленности магнитного поля, а запись магнитограммы на твердотельную (внешнюю) память производят в соответствии с изменением координат, получаемых от встроенного модуля GPS-ГЛОНАСС [Патент РФ №2572907, МПК F17D 5/02
Недостатком способа является:
- необходимость строгого сохранения вертикального положения антенны для обеспечения помехозащищенности;
- недостаточная информативность измеряемых сигналов вследствие того, что она определяется только одной вертикальной составляющей градиента магнитного поля
- способ, использующий контроль только вертикальной составляющей магнитной индукции над трубопроводом, значительно подвержен влиянию глобальных магнитных полей, а также то, что известный способ предназначен для контроля мгновенных значений изменения магнитной индукции без возможности записи измеряемых значений модуля сигнала и его координат.
Наиболее близким к заявляемому устройству по технической сущности и достигаемому эффекту является устройство, используемое в способе для обнаружения дефектов трубопровода и врезок в трубопровод, содержащее корпус с электронным блоком и антенну, при этом оно снабжено программно-управляемым резистором, инструментальным усилителем, контроллером, модулем GPS-ГЛОНАСС с встроенной антенной, блоком индикации, блоком внешней памяти и схемой из двух индукционных датчиков, размещенных на одной оси, разнесенных в пространстве и включенных в дифференциально-мостовую схему с электронной балансировкой программно-управляемым резистором, при этом антенна выполнена с возможностью передачи сигнала со своего выхода через инструментальный усилитель и двунаправленный интерфейс на вход контроллера, выполненного с возможностью получения сигнала с модуля GPS- ГЛОНАСС и передачи сигнала на блок индикации, блок внешней памяти и через двунаправленный интерфейс на управляющий вход программно-управляемого резистора [Патент РФ №2572907, МПК F17D 5/02].
Известное устройство имеет ряд недостатков:
- критичность к положению антенны, что связано с человеческим фактором, а именно, изменение положения антенны от вертикали приводит к значительным помехам от азимутального воздействия магнитного поля земли при наклонах антенны;
- недостаточная информативность измеряемого сигнала для детальной классификации и ранжирования дефектов по степени критичности.
Задачей предлагаемого изобретения является повышение помехозащищенности, информативности и достоверности результатов обследования,
При реализации изобретения достигается следующий технический результат:
- повышение помехозащищенности от азимутальной составляющей магнитного поля;
- некритичность положения антенны в пространстве на результаты измерения;
- повышение информативности измеряемых сигналов за счет электрометрической антенны, снимающей сигнал от подключенного к трубопроводу генератора известной частоты и (или) сигнал промышленной частоты от электрохимической защиты трубопровода;
- дополнительные компоненты, ориентированные ортогонально друг к другу для магнитометрической антенны и электрометрической антенны, также увеличивают информативность принимаемого сигнала, в отличие от однокомпонентной антенны;
- сигналы, полученные от двух антенн магнитометрической и электрометрической, использующих два разных физических принципа, коррелируют получаемую информацию по различающимся признакам, позволяющим с большой достоверностью описать и классифицировать дефекты.
Указанный технический результат достигается тем, что способ обнаружения дефектов трубопровода и врезок в трубопровод, включает непрерывное измерение составляющей магнитной индукции над трубопроводом и вдоль него, и выявление участка трубопровода с дефектом, определение градиента модуля вектора магнитной индукции с получением магнитограммы, с последующей записью считываемой магнитограммы на внешнюю память, при этом наличие участка трубопровода с дефектом или врезкой определяют по плавному возрастанию или убыванию магнитограммы в зависимости от величины и направленности магнитного поля, а запись магнитограммы во внешнюю память производят в соответствии с изменением координат, получаемых от встроенного модуля GPS-ГЛОНАСС. Способ отличается тем, что производят непрерывное измерение трехкомпонентной магнитометрической антенной трех ортогональных проекций градиента постоянного магнитного поля, с последующим вычислением среднеквадратического значения, соответствующего скаляру объемного градиента магнитной индукции над обследуемым трубопроводом и вдоль него, одновременно производят измерение трехкомпонентной электрометрической антенной трех ортогональных проекций переменного магнитного поля от подключенного к трубопроводу генератора известной частоты и (или) сигнала промышленной частоты от электрохимической защиты трубопровода с последующим вычислением скаляра переменного магнитного поля над тем же участком трубопровода, полученные скалярные значения постоянного и переменного градиентов магнитной индукции записываются во внешнюю память и используются для формирования магнитограммы постоянного магнитного поля и переменного магнитного поля и по совокупности признаков, выделяемых на магнитограмме выявляются места содержащие дефекты.
Указанный технический результат достигается тем, что устройство для обнаружения дефектов трубопровода и врезок в трубопровод содержит электронный блок и магнитометрическую антенну, которая снабжена программно-управляемым резистором, инструментальным усилителем и схемой из двух индукционных датчиков, размещенных на одной оси, разнесенных в пространстве и встроенных в дифференциально-мостовую схему с электронной балансировкой программно-управляемым резистором, а электронный блок содержит контроллер, модуль GPS-ГЛОНАСС с встроенной антенной, блок индикации и блок внешней памяти, при этом выход модуля GPS-ГЛОНАСС соединен через контроллер и двунаправленный интерфейс на вход контроллера антенн, и обратно на контроллер, а два других выхода контроллера с блоком индикации и с блоком внешней памяти, а через двунаправленный интерфейс на управляющий вход программно-управляемого резистора. Устройство отличается тем, что магнитометрическая антенна выполнена трехкомпонентной, а антенна дополнительно содержит трехкомпонентную электрометрическую антенну, компоненты которой выполнены в виде двух индукционных датчиков, размещенных на одной оси, разнесенных в пространстве и встроенных в дифференциально-мостовую схему, выходы компонент соединены с контроллером антенн, выход которого интерфейсно соединен с контроллером электронного блока.
Антенны в таком исполнении позволяют перейти из векторной системы контроля градиентов постоянного магнитного поля и градиентов переменного магнитного поля в скалярную систему контроля и приобрести три степени свободы ориентации в контролируемом антеннами пространстве и соответственно повысить помехоустойчивость при тряске и колебаниях, делает независимым прием полезных сигналов к пространственной ориентации.
Трехкомпонентная электрометрическая антенна обеспечивает дополнительный информационный канал, способствующий приему переменного магнитного поля, излучаемого трубопроводом от подключаемого на известной частоте генератору и (или) сигнала промышленной частоты от электрохимической защиты трубопровода. То, что компоненты антенн ориентированы соосно с осями ортогональных координат и преобразованы из векторных значений в скалярные значения градиентов магнитной индукции постоянного магнитного поля и переменного магнитного поля в измеряемом компонентами пространстве, превращает принимаемый векторный сигнал в скалярный, некритичный к пространственной ориентации антенн.
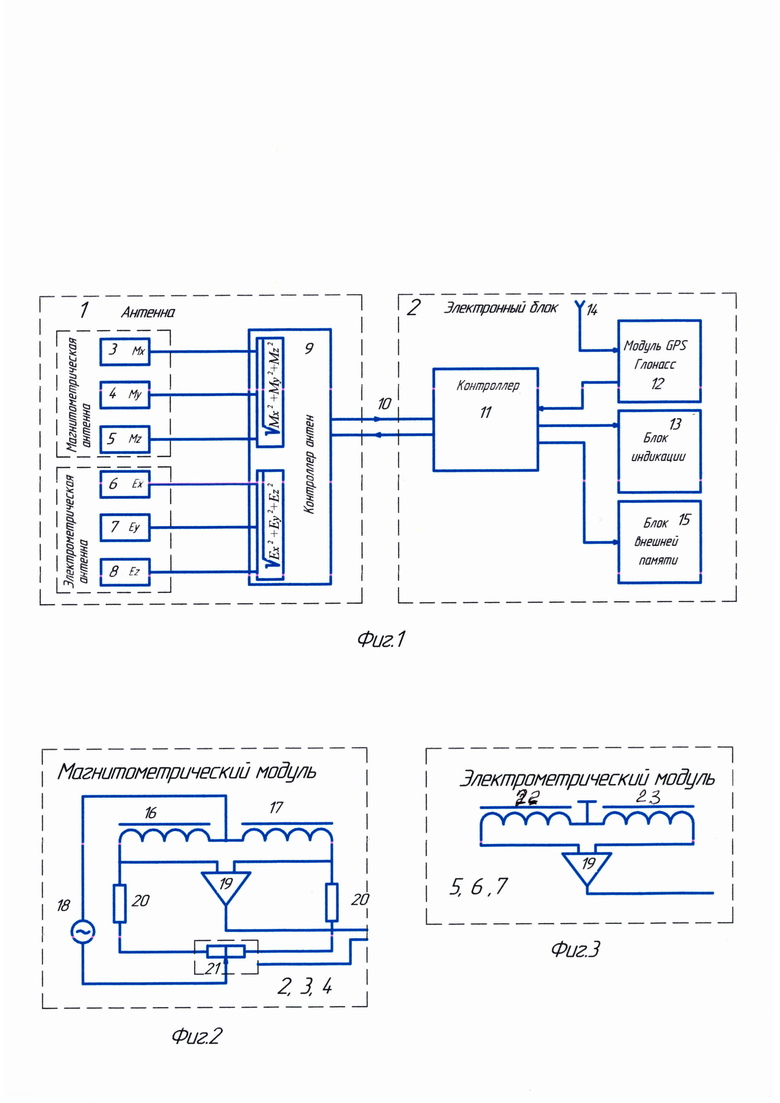
На фиг. 1 представлена функциональная схема устройства.
Устройство содержит антенну 1 и электронный блок 2, при этом антенна содержит магнитометрические 3, 4, 5 и дополнительно трехкомпонентные электрометрические 6, 7, 8 антенны и контроллер антенн 9. При этом компоненты выше названных антенн ориентированы соосно с осями ортогональных координат, и измеряемые значения программно преобразуются в среднеквадратические значения градиентов постоянного и переменного магнитного поля в измеряемом компонентами пространстве. Магнитометрические 3, 4, 5 и электрометрические 6, 7, 8 антенны соединены со входами контроллера антенн 9. Выход контроллера антенн 9 через двунаправленный интерфейс 10 соединен со входом контроллера 11, выполненного с возможностью получения сигнала с модуля GPS- ГЛОНАСС 12 и передаче сигнала на блок индикации 13. На другой вход контроллера 11 поступает сигнал с встроенной антенны 14 через модуль GPS-ГЛОНАСС 12, осуществляющий привязку к географическим координатам, а с выхода контроллера 11 сигнал поступает одновременно на блок индикации 13 и блок внешней памяти 15, второй управляющий выход контроллера 11 через двунаправленный интерфейс 10 поступает на управляющий вход программно-управляющего резистора 21 (фиг. 2).
Дальнейшая работа прибора происходит в автоматическом режиме. При движении пользователя вдоль трубопровода происходит смена координат местоположения, что соответственно фиксируется модулем GPS-ГЛОНАСС и каждой смене координат соответствует скалярное значение градиента постоянного и переменного магнитного поля. Получаемая информация накапливается в блоке внешней памяти, а текущие данные в виде фрагмента участка воспроизводятся на экране блока индикации.
На фиг. 2 приведена схема магнитометрической компоненты.
Компонент магнитометрической антенны состоит из двух индукционных датчиков 16 и 17, разнесенных в пространстве вдоль одной оси, два конца этих индукционных датчиков объединены и подключены к выводу высокочастотного генератора подмагничивания 18, а два других конца датчиков подключены к входам инструментального усилителя 19, к которым одновременно подключены резисторы 20, вторые концы которых соединены к концам программно-управляемого резистора 21, образующих управляемую мостовую схему, а второй вывод генератора 18 соединен к среднему выводу программно-управляемого резистора 20. В рабочее состояние схема переходит после балансировки мостовой схемы переменным программно-управляемым резистором 21 от сигнала, поступающего с контроллера антенн 9. Выход инструментального усилителя 19 содержит сигнал градиента постоянного магнитного поля в соответствии с пространственной ориентацией антенны к положению трубопровода.
На фиг. 3 приведена схема электрометрической компоненты.
Компонент электрометрической антенны состоит из двух индукционных датчиков 22 и 23, разнесенных в пространстве вдоль одной оси, два конца индукционных датчиков объединены и подключены к общему проводу, а два других конца подключены ко входам инструментального усилителя 19, разностный сигнал с выхода инструментального усилителя 19 соответствует градиенту переменного магнитного поля, индуцируемого трубопроводом от подключенного генератора с известной частотой и (или) сигнал промышленной частоты от электрохимической защиты трубопровода в соответствии с пространственной ориентацией антенны к положению трубопровода, при этом максимальный сигнал присутствует при совпадении оси индукционных датчиков с осью трубопровода, а минимальный - при расположении индукционных датчиков перпендикулярно оси трубопровода.
В трехкомпонентном исполнении магнитометрическая и электрометрическая антенны измеряют проекции градиентов магнитного поля на оси прямоугольной системы координат и независимо от положения антенн в пространстве вычисляется среднеквадратические значения результатов измерений компонентов для каждой антенны, которые соответствуют скалярам измеряемых величин.
Вышеназванные антенны расположены по осям трех равноудаленных от начала координат ортогональных проекций на прямоугольную систему координат и позволяют, геометрическим сложением, вычислять среднеквадратическое значение градиента магнитного поля в измеряемом пространстве. Результаты среднеквадратических значений (СКЗ) передаются в контроллер 11, получая при этом информацию по двум каналам, использующим разные физические методы, магнитометрический и электрометрический.
Это делает устройство некритичным к пространственному положению, увеличивает помехоустойчивость к колебаниям и обеспечивает взаимную корреляцию полезного сигнала. А встроенная экспертная программа позволит получить из большого объема информации более достоверную интерпретацию сигнала.
Способ обнаружения дефектов в трубопроводе и врезок в трубопровод осуществляется следующим образом.
Производят непрерывное измерение градиента постоянного магнитного поля трехкомпонентной магнитометрической антенной, при этом измеряют три ортогональные проекции градиента постоянного магнитного поля на оси прямоугольной системы координат с последующим вычислением среднеквадратического значения, которое для каждой из антенн определяют по формуле  , где М - среднеквадратическое значение трех ортогональных векторов проекций градиента магнитного поля на оси прямоугольной системы координат Мх, My, Mz, соответствующее скаляру объемного градиента магнитного поля над обследуемым трубопроводом и вдоль него. Одновременно производят непрерывное измерение градиента переменного магнитного поля трехкомпонентной электрометрической антенной, при этом измеряют три ортогональные проекции градиента переменного магнитного поля на оси прямоугольной системы координат с последующим вычислением среднеквадратического значения, которое для каждой из антенн определяют по формуле
, где М - среднеквадратическое значение трех ортогональных векторов проекций градиента магнитного поля на оси прямоугольной системы координат Мх, My, Mz, соответствующее скаляру объемного градиента магнитного поля над обследуемым трубопроводом и вдоль него. Одновременно производят непрерывное измерение градиента переменного магнитного поля трехкомпонентной электрометрической антенной, при этом измеряют три ортогональные проекции градиента переменного магнитного поля на оси прямоугольной системы координат с последующим вычислением среднеквадратического значения, которое для каждой из антенн определяют по формуле  где Е - среднеквадратическое значение трех ортогональных проекций градиента переменного магнитного поля на оси прямоугольной системы координат Ex, Еу, Ez, соответствующее скаляру объемного градиента магнитной индукции переменного магнитного поля над обследуемым трубопроводом и вдоль него. При этом источником градиента магнитной индукции является трубопровод с подключенным к нему генератором известной частоты и (или) сигналом промышленной частоты от электрохимической защиты трубопровода. Полученные скалярные значения градиентов постоянного и переменного магнитного поля являются некритичными к положению антенны в точке измерения и служат для независимого считывания и взаимной корреляции обнаруженных аномалий и по совокупности выявленных признаков детально классифицировать вид дефекта.
где Е - среднеквадратическое значение трех ортогональных проекций градиента переменного магнитного поля на оси прямоугольной системы координат Ex, Еу, Ez, соответствующее скаляру объемного градиента магнитной индукции переменного магнитного поля над обследуемым трубопроводом и вдоль него. При этом источником градиента магнитной индукции является трубопровод с подключенным к нему генератором известной частоты и (или) сигналом промышленной частоты от электрохимической защиты трубопровода. Полученные скалярные значения градиентов постоянного и переменного магнитного поля являются некритичными к положению антенны в точке измерения и служат для независимого считывания и взаимной корреляции обнаруженных аномалий и по совокупности выявленных признаков детально классифицировать вид дефекта.
После обнаружения дефекта магнитные поля, обусловленные эффектом «Виллари» в местах упругой деформации участков трубопровода, распознаются по скаляру постоянного магнитного поля М и по скаляру переменного магнитного поля Е, являющихся источниками от разных физических факторов, а именно постоянного магнитного поля, включающего магнитное поле земли, исходную начальную намагниченность трубопровода и влияние магнитного поля окружающих металлических коммуникаций. А переменное магнитное поле Е включает магнитные поля, вызванные протекающим переменным током известной частоты от электрохимической защиты и (или) генератора, подключенного к трубопроводу. Вышеуказанные формулы определения скаляра градиента постоянного магнитного поля М и скаляра градиента переменного магнитного поля Е включают две независимые характеристики дефекта по разным признакам, например, изменение скаляра М включает признаки напряженно-деформированного состояния обнаруженного дефектного участка трубопровода, изменение геометрии трубопровода, нарушения сплошности стенок трубопровода. Изменение скаляра Е включает признаки нарушения гидроизоляции трубопровода, отводы трубопровода, напряженно-деформированного состояния обнаруженного дефектного участка трубопровода.
Запись считываемой магнитограммы постоянного магнитного поля М и магнитограммы переменного магнитного поля Е осуществляется в соответствии с изменением координат, получаемых от встроенного модуля GPS-ГЛОНАСС на твердотельную (внешнюю) память в соответствии с изменением географических координат модуля GPS-ГЛОНАСС.
Наличие на обследуемом участке дефекта или врезки и их географические координаты определяют по изменениям амплитуды, скорости изменения сигнала и формы магнитограмм постоянного магнитного поля и переменного магнитного поля, полученных в скалярном виде в соответствии с изменениями координат модуля GPS-ГЛОНАСС.
Таким образом, предлагаемый способ для обнаружения дефектов трубопровода и врезок в трубопровод и устройство для его осуществления позволяют получать информацию по двум каналам, использующим разные физические методы. Это делает прибор некритичным к пространственному положению. Увеличивает помехоустойчивость к колебаниям и обеспечивает взаимную корреляцию полезных сигналов.
Кроме того, предлагаемые способ и устройство для обнаружения утечек и врезок в нефтяные трубопроводы позволяют использовать способ обследования магистральных трубопроводов на беспилотных летательных аппаратах и беспилотных подводных аппаратах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения дефектов трубопроводов и устройство для его осуществления | 2023 |
|
RU2822335C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572907C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ МАГНИТНОГО СОСТОЯНИЯ ОБЪЕКТОВ | 2021 |
|
RU2759799C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2379579C1 |
| Способ обнаружения несанкционированных врезок в трубопровод и устройство для его реализации | 2020 |
|
RU2751271C1 |
| Устройство обнаружения дефектов металлических трубопроводов | 2023 |
|
RU2831870C1 |
| Способ обнаружения несанкционированных врезок в подземный трубопровод | 2020 |
|
RU2741177C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА МЕТОДОМ МАГНИТОМЕТРИЧЕСКОЙ СЪЕМКИ | 2013 |
|
RU2542625C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
Группа изобретений относится к области трубопроводного транспорта и может быть использована для обнаружения местоположения дефектов магистральных и иных трубопроводов, а также врезок в трубопровод. Особенность изобретения заключается в том, что трехкомпонентной магнитометрической антенной непрерывно измеряют три ортогональные проекции градиента постоянного магнитного поля с последующим вычислением среднеквадратического значения, соответствующего скаляру объемного градиента магнитной индукции над обследуемым трубопроводом и вдоль него. Одновременно измеряют трехкомпонентными электрометрическими датчиками три ортогональные проекции переменного магнитного поля от подключенного к трубопроводу генератора известной частоты и (или) промышленной частоты от электрохимической защиты трубопровода. Затем вычисляют скаляр переменного магнитного поля над тем же участком трубопровода. Полученные скалярные значения постоянного и переменного градиентов магнитной индукции используют для формирования магнитограммы. Магнитограмму записывают в твердотельную память в соответствии с изменением координат, получаемых от встроенного модуля GPS-ГЛОНАСС. По совокупности признаков на магнитограмме выявляют места, содержащие дефекты. Также предложено устройство для осуществления способа. Предлагаемый способ и устройство позволяют получать информацию по двум каналам, использующим разные физические методы. Это делает прибор некритичным к пространственному положению, увеличивает помехоустойчивость к колебаниям и обеспечивает взаимную корреляцию полезных сигналов. Способ и устройство могут быть использованы на беспилотных летательных или подводных аппаратах. 2 н.п. ф-лы, 3 ил.
1. Способ обнаружения дефектов трубопровода и врезок в трубопровод, включающий непрерывное измерение составляющей магнитной индукции над трубопроводом и вдоль него, и выявление участка трубопровода с дефектом, определение градиента модуля вектора магнитной индукции с получением магнитограммы, с последующей записью считываемой магнитограммы на внешнюю память, при этом наличие участка трубопровода с дефектом или врезкой определяют по плавному возрастанию или убыванию магнитограммы в зависимости от величины и направленности магнитного поля, а запись магнитограммы во внешнюю память производят в соответствии с изменением координат, получаемых от встроенного модуля GPS-ГЛОНАСС, отличающийся тем, что производят непрерывное измерение трехкомпонентной магнитометрической антенной трех ортогональных проекций градиента постоянного магнитного поля, с последующим вычислением среднеквадратического значения, соответствующего скаляру объемного градиента магнитной индукции над обследуемым трубопроводом и вдоль него, одновременно производят измерение трехкомпонентной электрометрической антенной трех ортогональных проекций переменного магнитного поля от подключенного к трубопроводу генератора известной частоты и (или) сигнала промышленной частоты от электрохимической защиты трубопровода с последующим вычислением скаляра переменного магнитного поля над тем же участком трубопровода, полученные скалярные значения постоянного и переменного градиентов магнитной индукции записываются во внешнюю память и используются для формирования магнитограммы постоянного магнитного поля и переменного магнитного поля и по совокупности признаков, выделяемых на магнитограмме выявляются места содержащие дефекты.
2. Устройство для обнаружения дефектов трубопровода и врезок в трубопровод, содержащее электронный блок и магнитометрическую антенну, которая снабжена программно-управляемым резистором, инструментальным усилителем и схемой из двух индукционных датчиков, размещенных на одной оси, разнесенных в пространстве и встроенных в дифференциально-мостовую схему с электронной балансировкой программно-управляемым резистором, а электронный блок содержит контроллер, модуль GPS-ГЛОНАСС с встроенной антенной, блок индикации и блок внешней памяти, при этом выход модуля GPS-ГЛОНАСС соединен через контроллер и двунаправленный интерфейс на вход контроллера антенн и обратно на контроллер, а два других выхода контроллера - с блоком индикации и с блоком внешней памяти, а через двунаправленный интерфейс - на управляющий вход программно-управляемого резистора, отличающееся тем, что магнитометрическая антенна выполнена трехкомпонентной, а антенна дополнительно содержит трехкомпонентную электрометрическую антенну, компоненты которой выполнены в виде двух индукционных датчиков, размещенных на одной оси, разнесенных в пространстве и встроенных в дифференциально-мостовую схему, выходы компонент соединены с контроллером антенн, выход которого интерфейсно соединен с контроллером электронного блока.
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572907C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШЕНИЙ ИЗОЛЯЦИОННОГО ПОКРЫТИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2003 |
|
RU2263333C2 |

