Изобретение относится к области дефектоскопии и диагностики магистральных нефтегазопроводов и может быть использовано в других отраслях промышленности при обнаружении дефектов и повреждений различных продуктопроводов, например:
- непроваров сварных швов, продольных и поперечных трещин, расслоений, раковин и потери металла труб;
- рисок и задиров на их внутренней поверхности;
- вмятин, овальности и различных неоднородностей в местах сварки стыков труб, выдающихся внутрь трубопровода и уменьшающих его проходное сечение;
- стресс-коррозионных и коррозионных повреждений и др.
Указанные дефекты могут располагаться в любой точке по всему периметру труб; однако наибольшее количество весьма опасных дефектов стресс-коррозии было выявлено в нижней части труб с расположением на 4-5 ч и 7-8 ч по периметру (1) (Развитие системы диагностического обслуживания МГ. В.Н. Дедешко, В.В. Салюков. Жур. «Газовая промышленность», 2005, №8, с.15-18).
Отмеченное многообразие и разнородность дефектов обуславливает необходимость применения разных типов дефектоскопов, использующих контактные и бесконтактные методы получения информации с применением различных физических полей (магнитных, электромагнитных, электромагнитно-акустических, ультразвуковых и др.) и последовательного запуска их в обследуемый участок трубопровода для предотвращения пропусков тех или иных видов дефектов (1), (2) (Новые подходы к планированию ремонта и диагностике магистральных трубопроводов. Газовая промышленность. Обзорная информация. Серия: Транспорт и хранение газа. ООО «ИРЦ Газпром», 1999, с.42-58).
Известны магнитные дефектоскопы для обследования трубопроводов, например, типа «ДМТ» и «ДМТП» (1), «MFL» (3) (Магнитный дефектоскоп MFL. Проспект ОАО ЦТД «Диаскан»), «КОД» (4) (Дефектоскоп КОД-4М-1420. Проспект ДКДТ), электронные профилемеры «ПРТ» (1), а также ультразвуковые дефектоскопы, например, типа «WM» (5) (Ультразвуковой дефектоскоп WM. Проспект ОАО ЦТД «Диаскан»), «CD» - аналог (6) (Ультразвуковой дефектоскоп CD. Проспект ОАО ЦТД «Диаскан») и др.
Их общим недостатком является низкая эффективность выявления дефектов трубопроводов, т.к. в процессе движения дефектоскопов вдоль оси трубопровода происходит их вращение вокруг продольной оси, что неминуемо приводит:
- к вращению блока датчиков дефектов и датчиков пройденного пути;
- к неповторяемости выходных сигналов датчиков дефектов и погрешности определения пройденного пути, поскольку они (датчики дефектов и датчики пройденного пути) движутся по неповторяющимся от исследования к исследованию спиральным траекториям;
- к погрешности определения местоположения дефектов по длине трубопровода;
- к неопределенности в определении количества дефектов, т.к. один и тот же дефект может быть зарегистрирован в разных местах по длине исследуемого трубопровода (при первичном и повторном пропуске дефектоскопов из-за погрешности определения местоположения дефектов по длине трубопровода).
Таким образом, для выявления имеющихся в обследуемом трубопроводе дефектов и определения степени опасности каждого из них оказывается необходимым проведение многократных исследований. (На практике, при 5-6 пропусках дефектоскопических устройств и совместной интерпретации результатов исследований, достоверность информации о дефектах трубопроводов составляет около 60-70%).
Кроме того, указанные дефектоскопические устройства (1, 3, 4, 5, 6) и др. состоят из отдельных модулей (с блоками датчиков преимущественно цилиндрической формы и элементами, контактирующими с внутренней поверхностью трубопровода), соединенных между собой шарнирными сцепками. Такая конструкция дефектоскопических устройств не обеспечивает свободного прохождения их в участках трубопроводов, имеющих местные сужения, задиры и острые кромки, выдающиеся на внутреннюю поверхность в местах сварных швов и т.д.
Поэтому на практике обследование трубопроводов нередко сопровождается:
- частыми остановками дефектоскопических устройств из-за их застревания внутри трубопроводов;
- большими потерями времени, не позволяющими выполнить обследование протяженных трубопроводов за летний период;
- большими материальными и трудовыми затратами.
Все вышеизложенное приводит к низкой эффективности известных дефектоскопических устройств для диагностики трубопроводов (1, 3, 4, 5, 6) и др.
Известно также устройство для измерения температуры и контроля за изменением гидродинамических процессов, происходящих в потоке жидкости или газа, движущегося по трубопроводу, включающее два полых эластичных сферических элемента несущего корпуса, соединенных между собой с помощью элемента связи - обоймы, на которой с одной стороны (внутри первого сферического элемента несущего корпуса) установлен магнитный датчик, а с другой (внутри второго сферического элемента несущего корпуса) - источник питания и электронный блок с регистратором измеряемого параметра (7) (Контроль за изменением температуры в потоке жидкости. С.А.Бобровский, М.Э.Шварц. Жур. «Нефтяное хозяйство», 1973, №1, с.60-61).
По сравнению с другими устройствами для диагностики трубопроводов (1, 3, 4, 5, 6) и т.п. данное известное устройство обладает лучшей проходимостью в участках трубопроводов, имеющих местные сужения и другие неоднородности на их внутренней поверхности за счет выполнения элементов несущего корпуса в виде эластичных сфер.
Однако оно также обладает низкой эффективностью, поскольку с его помощью регистрируется только один параметр вдоль оси (по длине) исследуемого трубопровода.
Задачей настоящего изобретения является повышение эффективности устройства для обследования и диагностики трубопроводов за счет:
- повышения проходимости устройства вдоль оси исследуемого трубопровода;
- расширения функциональных возможностей и повышение информативности устройства;
- повышения достоверности выявления дефектов и точности определения их местоположения вдоль оси исследуемого трубопровода.
Сущность настоящего изобретения заключается в том, что известное устройство для обследования и диагностики трубопроводов, содержащее несущий корпус, выполненный в виде двух сфер с наружным диаметром меньше внутреннего диаметра трубопровода, соединенных между собой элементом связи, и установленные внутри сфер датчик технологических параметров дефектов, датчик длины пройденного пути, источник питания, электронный блок с регистратором измеряемых параметров, отличающееся тем, что дополнительно содержит микропроцессор для предварительной обработки сигналов датчиков и управления работой устройства, а элемент связи сфер выполнен в виде упругой гибкой связи с полыми осевыми окончаниями, проходящими через центры сфер с возможностью проворота каждой из сфер относительно друг друга и полых осевых окончаний элементов гибкой связи, причем датчики дефектов равномерно размещены по периметру наружной поверхности подвижного кольцевого основания, имеющего смещенный центр тяжести, и установленного соосно внутри сфер несущего корпуса в их диаметральной плоскости, перпендикулярной продольной оси устройства на полых осевых окончаниях элементов гибкой связи с возможностью постоянной ориентации по направлению действия сил гравитации.
При этом, по крайней мере, одна из сфер несущего корпуса разделена в диаметральной плоскости, перпендикулярной продольной оси устройства с образованием двух идентичных полусфер, установленных относительно друг друга с зазором, в котором на подвижном кольцевом основании со смещенным центром тяжести размещены датчики для контактного и бесконтактного съема информации о дефектах и состоянии внутренней поверхности обследуемого трубопровода с возможностью постоянной ориентации по направлению действия сил гравитации.
Кроме того, устройство дополнительно содержит бесконтактные датчики для электромагнитно-акустической, магнитоимпульсной дефектоскопии, магнитной и электромагнитной толщинометрии трубопровода, датчики напряженного состояния металла, размещенные на наружной поверхности подвижного кольцевого основания, имеющего смещенный центр тяжести и установленного на полом осевом окончании элемента гибкой связи с возможностью постоянной ориентации по направлению действия сил гравитации.
Причем устройство дополнительно содержит датчики визуального определения состояния внутренней поверхности трубопровода, установленные на кольцевом основании со смещенным центром тяжести в зазоре между двумя полусферами и на полом осевом окончании элемента гибкой связи перед несущим корпусом по ходу движения устройства, а датчики для определения пройденного пути установлены на полой оси, жестко связанной с кольцевым основанием со смещенным центром тяжести, с возможностью постоянной ориентации по направлению действия сил гравитации в задней части устройства.
При этом устройство дополнительно содержит датчики влажности, уровня и электропроводности прокачиваемого по трубопроводу флюида, установленные на полом осевом окончании элемента гибкой связи перед несущим корпусом по ходу движения устройства.
Причем устройство дополнительно снабжено, по крайней мере, двумя эластичными манжетами, контактирующими с внутренней поверхностью трубопровода и установленными на полых осевых окончаниях элементов гибкой связи за первым и вторым по ходу движения элементами сферического несущего корпуса, двумя датчиками давления, установленными с наружных сторон эластичных манжет и перепускным клапаном, управляемым с помощью микропроцессора по сигналам от датчиков давления для регулирования скорости движения дефектоскопа вдоль оси трубопровода.
Повышение проходимости устройства вдоль оси исследуемого трубопровода достигается за счет выполнения элементов несущего корпуса в виде, как минимум, двух полых сфер (из «прозрачных» для физических полей материалов) с наружным диаметром меньше внутреннего диаметра трубопровода и соединенных упругой гибкой связью по линии, проходящей через их центры с возможностью проворота каждой из сфер относительно друг друга и элементов упругой гибкой связи.
Расширение функциональных возможностей и повышение информативности устройства достигается путем дополнительной установки бесконтактных датчиков дефектов на подвижном основании, выполненном в виде кольца со смещенным центром тяжести, причем датчики дефектов установлены на его наружной поверхности, распределены равномерно по периметру, а само подвижное кольцевое основание установлено внутри полых сферических элементов несущего корпуса в диаметральной плоскости, перпендикулярной продольной оси устройства, и постоянно ориентировано относительно направления действия сил гравитации.
Повышение достоверности выявления дефектов и точности определения их местоположения вдоль оси исследуемого трубопровода обеспечивается за счет постоянной ориентации датчиков дефектов и датчика длины пройденного пути относительно направления действия сил гравитации (по одной из образующих трубопровода), что, в свою очередь, исключает их движение по неповторяющимся спиральным траекториям из-за вращения известных дефектоскопов при их движении вдоль оси трубопровода.
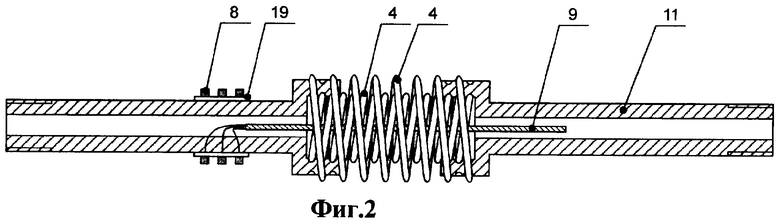
На Фиг.1 схематично показано предлагаемое дефектоскопическое устройство для обследования и диагностики трубопроводов, где:
1 - труба трубопровода в разрезе;
2 - эластичная манжета;
3 - сферические элементы несущего корпуса;
4 - пружины элементов гибкой связи (с противоположным направлением витков);
5 - неуравновешенное кольцевое основание;
6 - датчики дефектов;
7 - щеточный узел токосъемного устройства;
8 - контактные кольца;
9 - соединительный кабель;
10 - подшипники;
11 - полые осевые окончания элементов гибкой связи;
12- фиксатор (гайка);
13 - датчик проходного сечения и профиля внутренней поверхности трубопровода;
14 - рычаг датчика проходного сечения и профиля внутренней поверхности трубопровода;
15 - датчик пройденного пути;
16 - электронный блок обработки информации (с микропроцессором, твердотельной памятью и др.);
17 - блок питания;
18 - датчики визуального определения состояния внутренней поверхности трубопровода;
19 - изолирующая вставка контактных колец токосъемника;
20 - полая ось (для установки датчика проходного сечения и профиля внутренней поверхности трубопровода, жестко связанная с кольцевым основанием 5).
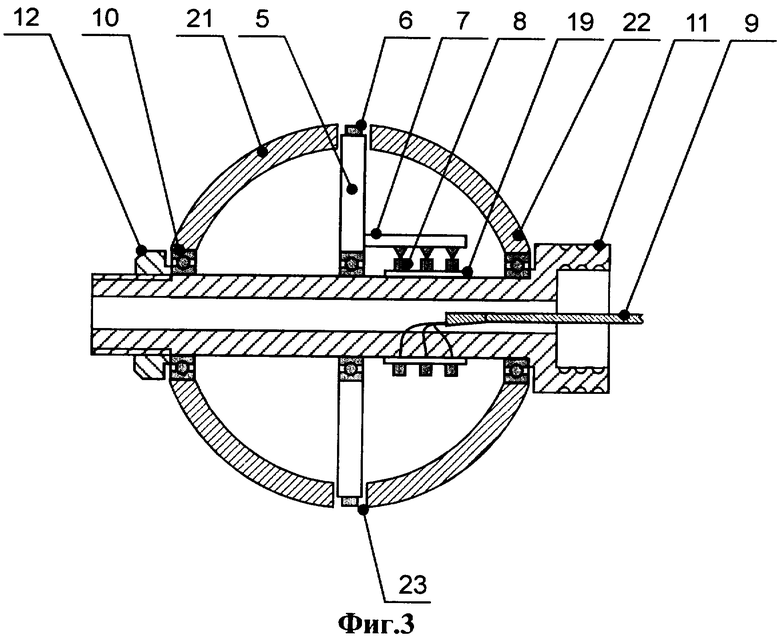
На Фиг.2 приведен элемент гибкой упругой связи, состоящий из двух полых осевых окончаний 11, двух пружин с противоположным направлением витков 4, соединительного кабеля 9 и контактных колец 8, установленных на изолирующей вставке 19.
На Фиг.3 показан один из сферических элементов несущего корпуса 3, разделенный в диаметральной плоскости, перпендикулярной продольной оси устройства с образованием двух идентичных полусфер 21 и 22, установленных относительно друг друга с зазором 23, на полом осевом окончании элемента гибкой связи XY.
Устройство работает следующим образом.
При помещении устройства внутрь обследуемого трубопровода 1 и нагнетании потока прокачиваемого флюида, эластичные манжеты 2, установленные на полых осевых окончаниях 11 за 21, 22 и 3 элементами несущего корпуса прижимаются давлением флюида к внутренней поверхности трубопровода 1 и создают проталкивающее усилие. Устройство для обследования и диагностики трубопроводов начинает двигаться вдоль оси трубопровода 1. При этом все его датчики дефектов 6, установленные на подвижных кольцевых основаниях со смещенным центром тяжести 5, включая датчики проходного сечения и профиля внутренней поверхности трубопровода 13 и датчик пройденного пути 15, будут сохранять свою первоначальную ориентацию относительно направления действия сил гравитации даже в случае вращения устройства при его движении вдоль трубопровода 1 (за счет постоянной ориентации подвижных кольцевых оснований со смещенным центром тяжести 5 относительно направления действия сил гравитации). Таким образом, обеспечивается повышение достоверности выявления дефектов и точности определения их местоположения вдоль оси исследуемого трубопровода. Сигналы от датчиков 6, 13 и 15 через щеточный узел токосъемника 7, контактные кольца 8, установленные на изолирующей вставке 19, передаются по соединительному кабелю 9 в электронный блок обработки информации и регистрации 16, запитанный от блока электропитания 17. Сигналы от датчиков визуального определения состояния внутренней поверхности трубопровода 18 передаются по соединительному кабелю 9 в электронный блок обработки информации и регистрации в твердотельной памяти 16 без применения токосъемника, т.е. непосредственно. Регистрация поступающей информации производится с помощью микропроцессорного электронного блока обработки информации и регистрации в твердотельной памяти 16 в цифровой форме обычным способом.
Для получения максимальной чувствительности к дефектам путем максимального приближения магнитных и электромагнитных датчиков 6 к внутренней поверхности трубопровода 1, а также для устранения экранирующего влияния материала сферического элемента несущего корпуса 3 при ультразвуковой дефектоскопии, по крайней мере, одна из сфер несущего корпуса разделена (см. Фиг.3) в диаметральной плоскости, перпендикулярной продольной оси устройства с образованием двух идентичных полусфер 21 и 22, установленных относительно друг друга с зазором 23, в котором на подвижном кольцевом основании со смещенным центром тяжести 5 размещены датчики 6 для съема информации о дефектах обследуемого трубопровода.
При этом оказывается возможной установка на подвижном кольцевом основании 5 различных датчиков (как с контактным, так и с бесконтактным способом съема информации) для дальнейшего расширения функциональных возможностей устройства, например оптических (лазерных и т.д.).
Дальнейшее повышение эффективности устройства для обследования и диагностики трубопроводов обеспечивается путем дополнительной установки датчиков электромагнитно-акустической, магнитоимпульсной дефектоскопии, магнитной и электромагнитной толщинометрии и датчиков напряженного состояния металла трубопровода, также размещенных на наружной поверхности подвижного кольцевого основания 5 со смещенным центром тяжести, установленного на полом осевом окончании элемента гибкой связи 11 с возможностью постоянной ориентации по направлению действия сил гравитации.
Кроме того, для получения наиболее полной информации о техническом состоянии обследуемого трубопровода за один проход предлагаемого устройства, дополнительно введены датчики визуального определения состояния внутренней поверхности трубопровода 18, установленные на кольцевом основании 5 со смещенным центром тяжести в зазоре 23 между двумя полусферами 21 и 22, а также и на полом осевом окончании элемента гибкой связи 11 перед фиксатором 12 и полусферой 21 несущего корпуса по ходу движения устройства. Там же (на полом осевом окончании элемента гибкой связи 11 перед фиксатором 12 и полусферой 21 несущего корпуса по ходу движения устройства) установлены датчики влажности, уровня и электропроводности прокачиваемого по трубопроводу флюида (не показано). Следует отметить, что получения наиболее полной информации о техническом состоянии обследуемого трубопровода за один проход предлагаемого устройства, оказывается необходимым поддержание постоянной скорости его движения. Поэтому оно снабжено, по крайней мере, двумя эластичными манжетами 2, контактирующими с внутренней поверхностью трубопровода 1 и установленными на полых осевых окончаниях элементов гибкой связи 11 за элементами несущего корпуса 21, 22 и 3; двумя датчиками давления, установленными с наружных сторон эластичных манжет 2 и перепускным клапаном между ними, управляемым с помощью микропроцессора по сигналам от датчиков давления (не показано). На фиг.2 приведена конструкция элементов упругой гибкой связи, состоящей из двух полых осевых окончаний 11, между которыми установлены две пружины разного диаметра 4, вставленные одна в другую и имеющие противоположное направление витков. Благодаря такому конструктивному решению, каждая из пружин 4 имеет возможность упруго деформироваться в продольном и радиальных направлениях без эффекта «закусывания» отдельных витков, что способствует лучшему прохождению заявляемого устройства по трубопроводу 1 в участках с измененной внутренней геометрией.
Каждый из отмеченных признаков необходим, а все они вместе достаточны для решения задачи повышения эффективности устройства для обследования и диагностики трубопроводов.
Источники информации
1. Развитие системы диагностического обслуживания МГ. В.Н.Дедешко, В.В.Салюков. Жур. «Газовая промышленность», 2005, №8, с.15-18.
2. Новые подходы к планированию ремонта и диагностике магистральных трубопроводов. Газовая промышленность. Обзорная информация. Серия: Транспорт и хранение газа. ООО «ИРЦ Газпром», 1999, с.42-58.
3. Магнитный дефектоскоп MFL. Проспект ОАО ЦТД «Диаскан».
4. Дефектоскоп КОД-4М-1420. Проспект ДКДТ.
5.Ультразвуковой дефектоскоп WM. Проспект ОАО ЦТД «Диаскан».
6. Ультразвуковой дефектоскоп CD. Проспект ОАО ЦТД «Диаскан».
7. Контроль за изменением температуры в потоке жидкости. С.А.Бобровский, М.Э.Шварц. Жур. «Нефтяное хозяйство», 1973, №1, с.60-61 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБ | 2012 |
|
RU2528033C2 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| УСТРОЙСТВО И СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2022 |
|
RU2784140C1 |
| СПОСОБ ИСПЫТАНИЯ ТРУБОПРОВОДА НА БЕЗОПАСНОЕ РАБОЧЕЕ ВНУТРЕННЕЕ ДАВЛЕНИЕ С ОЦЕНКОЙ ОПАСНОСТИ СУЩЕСТВУЮЩИХ ДЕФЕКТОВ В ТРУБОПРОВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2473063C2 |
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО ПРОХОДНОГО КОНТРОЛЯ | 2007 |
|
RU2344413C2 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| УСТРОЙСТВО ДЛЯ ВИЗУАЛЬНОГО И ИЗМЕРИТЕЛЬНОГО КОНТРОЛЯ ВНУТРЕННИХ ПОЛОСТЕЙ | 2004 |
|
RU2290626C2 |
| СИСТЕМА ПОПЕРЕЧНОГО НАМАГНИЧИВАНИЯ ДЛЯ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА | 2019 |
|
RU2717902C1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
Изобретение относится к области дефектоскопии и диагностики магистральных нефтегазопроводов. Технический результат направлен на повышение эффективности устройства. Устройство для обследования и диагностики трубопроводов содержит несущий корпус, выполненный в виде двух сфер с наружным диаметром меньше внутреннего диаметра трубопровода, соединенных между собой элементом связи, и установленные внутри сфер датчик технологических параметров дефектов, датчик длины пройденного пути, источник питания, электронный блок с регистратором измеряемых параметров, микропроцессор для предварительной обработки сигналов датчиков и управления работой устройства, а элемент связи сфер выполнен в виде упругой гибкой связи с полыми осевыми окончаниями, проходящими через центры сфер с возможностью проворота каждой из сфер относительно друг друга и полых осевых окончаний элементов гибкой связи. Причем датчики дефектов равномерно размещены по периметру наружной поверхности подвижного кольцевого основания, имеющего смещенный центр тяжести, и установленного соосно внутри сфер несущего корпуса в их диаметральной плоскости, перпендикулярной продольной оси устройства на полых осевых окончаниях элементов гибкой связи с возможностью постоянной ориентации по направлению действия сил гравитации. 5 з.п. ф-лы, 3 ил.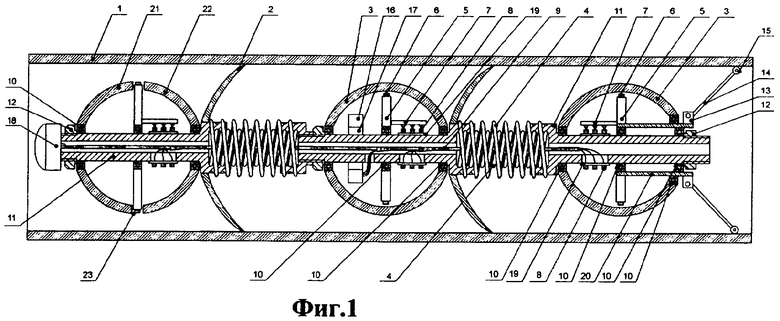
1. Устройство для обследования и диагностики трубопроводов, содержащее несущий корпус, выполненный в виде двух сфер с наружным диаметром меньше внутреннего диаметра трубопровода, соединенных между собой элементом связи, и установленные внутри сфер датчик технологических параметров дефектов, датчик длины пройденного пути, источник питания, электронный блок с регистратором измеряемых параметров, отличающееся тем, что дополнительно содержит микропроцессор для предварительной обработки сигналов датчиков и управления работой устройства, а элемент связи сфер выполнен в виде упругой гибкой связи с полыми осевыми окончаниями, проходящими через центры сфер с возможностью проворота каждой из сфер относительно друг друга и полых осевых окончаний элементов гибкой связи, причем датчики дефектов равномерно размещены по периметру наружной поверхности подвижного кольцевого основания, имеющего смещенный центр тяжести, и установленного соосно внутри сфер несущего корпуса в их диаметральной плоскости, перпендикулярной продольной оси устройства, на полых осевых окончаниях элементов гибкой связи с возможностью постоянной ориентации по направлению действия сил гравитации.
2. Устройство по п.1, отличающееся тем, что, по крайней мере, одна из сфер несущего корпуса разделена в диаметральной плоскости, перпендикулярной продольной оси устройства, с образованием двух идентичных полусфер, установленных относительно друг друга с зазором, в котором на подвижном кольцевом основании со смещенным центром тяжести размещены датчики для контактного и бесконтактного съема информации о дефектах и состоянии внутренней поверхности обследуемого трубопровода с возможностью постоянной ориентации по направлению действия сил гравитации.
3. Устройство по п.1, отличающееся тем, что дополнительно содержит бесконтактные датчики для электромагнитно-акустической, магнитоимпульсной дефектоскопии, магнитной и электромагнитной толщинометрии трубопровода, датчики напряженного состояния металла, размещенные на наружной поверхности подвижного кольцевого основания, имеющего смещенный центр тяжести и установленного на полом осевом окончании элемента гибкой связи с возможностью постоянной ориентации по направлению действия сил гравитации.
4. Устройство по п.1, отличающееся тем, что дополнительно содержит датчики визуального определения состояния внутренней поверхности трубопровода, установленные на кольцевом основании со смещенным центром тяжести в зазоре между двумя полусферами и на полом осевом окончании элемента гибкой связи перед несущим корпусом по ходу движения устройства, а датчики для определения пройденного пути установлены на полой оси, жестко связанной с кольцевым основанием со смещенным центром тяжести, с возможностью постоянной ориентации по направлению действия сил гравитации, в задней части устройства.
5. Устройство по п.1, отличающееся тем, что дополнительно содержит датчики влажности, уровня и электропроводности прокачиваемого по трубопроводу флюида, установленные на полом осевом окончании элемента гибкой связи перед несущим корпусом по ходу движения устройства.
6. Устройство по п.1, отличающееся тем, что дополнительно снабжено, по крайней мере, двумя эластичными манжетами, контактирующими с внутренней поверхностью трубопровода и установленными на полых осевых окончаниях элементов гибкой связи за первым и вторым, по ходу движения, элементами сферического несущего корпуса, двумя датчиками давления, установленными с наружных сторон эластичных манжет и перепускным клапаном, управляемым с помощью микропроцессора по сигналам от датчиков давления для регулирования скорости движения дефектоскопа вдоль оси трубопровода.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 1999 |
|
RU2157514C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ ТРУБ И ТРУБОПРОВОДОВ | 1999 |
|
RU2149394C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ СТЕНКИ НЕФТЯНЫХ И ГАЗОВЫХ ТРУБОПРОВОДОВ И ЦЕЛОСТНОСТИ ВНЕШНЕЙ ИЗОЛЯЦИИ | 1996 |
|
RU2121105C1 |
| СПОСОБ ДИАГНОСТИКИ И КОНТРОЛЯ КАЧЕСТВА МАТЕРИАЛА ТРУБОПРОВОДОВ | 1999 |
|
RU2193771C2 |

