Изобретение относится к радиолокации и может быть использовано в радиолокационной технике для определения количества целей в группе в условиях, когда цели близки по разрешаемым координатам так, что затрудняется их отдельное обнаружение.
Известен способ определения количества целей в группе, заключающийся в проверке сложных гипотез по критерию отношения правдоподобия [1]. Однако данный способ, имея характеристики, близкие к оптимальным, требует значительных вычислительных затрат, нелинейно растущих с увеличением области обнаружения так, что затрудняется его реализация.
Наиболее близким к предлагаемому изобретению является способ определения количества целей в группе, заключающийся в том, что выполняют аналого-цифровое преобразование отраженного от целей и принятого сигнала, вычисляют комплексные корреляционные суммы Y(fn) выборки принятого сигнала и опорных квадратурных сигналов при значениях параметра разрешения опорных сигналов f, взятых на равномерной сетке

где N - количество точек сетки, δf - шаг сетки, δf<Δf, Δf - размер элемента разрешения, [f1, fN] - область обнаружения. Определяют максимальные по ширине интервалы значений параметра разрешения [ai, bi], внутри которых все модули корреляционных сумм превышают порог обнаружения V, где i=1...I, I - количество интервалов. Так, что для fn∈[ai,bi] выполняется соотношение |Y(fn)|>V, а из условия fn∉[ai, bi], i=1...I, следует |Y(fn)|≤V. Определяют локальные максимумы  модулей корреляционных сумм внутри интервалов [ai,bi], i=1...I, где j=1...J, J - количество локальных максимумов, под которыми понимаются такие значения fn, для которых выполняются условия:
модулей корреляционных сумм внутри интервалов [ai,bi], i=1...I, где j=1...J, J - количество локальных максимумов, под которыми понимаются такие значения fn, для которых выполняются условия:

Принимают решение о соответствии каждого локального максимума одной цели в тех интервалах, внутри которых количество локальных максимумов более одного. Вычисляют ширину интервала [аi, bi], внутри которого находится один локальный максимум, и принимают решение о соответствии одного локального максимума двум целям в случае, если

где  - пороговая ширина интервала, зависящая от превышения значения локального максимума над порогом
- пороговая ширина интервала, зависящая от превышения значения локального максимума над порогом  . Принимают решение о соответствии одного локального максимума одной цели в случае невыполнения условия (3) [2].
. Принимают решение о соответствии одного локального максимума одной цели в случае невыполнения условия (3) [2].
Недостатком данного способа является низкая вероятность правильной оценки количества целей в группе в условиях, когда величины параметров разрешения, соответствующие сигналам целей, отличаются на величину, меньшую размера элемента разрешения.
Цель изобретения - повышение вероятности правильной оценки количества целей в группе в условиях, когда значения параметров разрешения, соответствующие сигналам целей, отличаются на величину, меньшую размера элемента разрешения.
Предлагаемый способ определения количества целей в группе заключается в следующем.
Выполняют аналого-цифровое преобразование отраженного от целей и принятого сигнала, вычисляют комплексные корреляционные суммы Y(fn) выборки принятого сигнала и опорных квадратурных сигналов при значениях параметра разрешения опорных сигналов, взятых на равномерной сетке fn, определяемой формулой (1). Определяют максимальные по ширине интервалы значений параметра разрешения [ai, bi], i=1...I, внутри которых все модули корреляционных сумм превышают порог обнаружения V. Определяют локальные максимумы j=1...J, модулей корреляционных сумм внутри интервалов по формуле (2). Принимают решение о соответствии каждого локального максимума одной цели в тех интервалах, внутри которых количество локальных максимумов более одного. Вычисляют ширину интервала, внутри которого находится один локальный максимум, принимают решение о соответствии одного локального максимума двум целям в случае выполнения условия (3). В противном случае (когда ширина интервала меньше пороговой ширины) вычисляют минимальную квадратичную невязку D отсчетов комплексных корреляционных сумм и отсчетов эталонных корреляционных сумм сигнала одной цели по формуле

где [fa, fb]=[ai, bi] для некоторого i;
σ - среднеквадратическое отклонение квадратурных составляющих корреляционных сумм, обусловленное наличием шумов;
Ym=Y(fm+n);
M=1...M, М - четное;
 при
при 
 при
при 
Sm(f) - значения эталонных корреляционных сумм сигнала одной цели с параметром разрешения, равным f, вычисленные в тех же точках, что и величины Ym, m=1...М.
Принимают решение о соответствии локального максимума внутри интервала [ai, bi] одной цели в случае, если D<Vd, и двум целям - если - D≥Vd, где Vd - порог невязки, выбираемый по вероятности принятия одиночной цели за групповую.
Новым признаком, обладающим существенными отличиями, является следующее.
В случае когда ширина интервала меньше пороговой ширины вычисляют минимальную квадратичную невязку D отсчетов комплексных корреляционных сумм и отсчетов эталонных корреляционных сумм сигнала одной цели по формуле (4), принимают решение о соответствии локального максимума внутри интервала [ai, bi] одной цели в случае, если D<Vd, и двум целям - если D≥Vd, где Vd - порог невязки, выбираемый по вероятности принятия одиночной цели за групповую.
Данный признак обладает существенными отличиями, т.к. в известных способах не обнаружен. Применение нового признака позволит повысить вероятность правильной оценки количества целей в условиях, когда значения параметров разрешения, соответствующие сигналам целей, отличаются на величину, меньшую размера элемента разрешения.
Пример оценки влияния отличительных признаков на технический результат.
В импульсно-доплеровских радиолокационных станциях в одном канале дальности опорными являются гармонические сигналы, квадратурные составляющие которых сдвинуты по фазе на 90° [3]. Параметром разрешения является частота Доплера f. Элементы разрешения по доплеровской частоте определяются значениями частот опорных сигналов, размещенных равномерно с шагом Δf=1/Т, где Т - время когерентного накопления сигнала. Для подавления боковых лепестков спектра сигналов выборочные значения опорных сигналов дополнительно умножаются на коэффициенты весового окна. Величины отсчетов комплексных корреляционных сумм Y(fn) соответствуют дискретному преобразованию Фурье на сетке частот fn, n=1...N. Значения эталонных корреляционных сумм сигнала одной цели Sm(f) в случае использования весового окна Хэмминга вычисляются по формуле

где Nx - размер сигнальной выборки.
Порог обнаружения V выставляется по вероятности ложных тревог, равной 10-4. Пороговая ширина для окна Хэмминга и данной величины V вычисляется по формуле

В результате моделирования установлено, что выбранная величина пороговой ширины обеспечивает вероятность принятия одиночной цели за групповую на уровне 10-4. Квадратичная невязка D определяется при следующих значениях параметров: δf=Δf/2, M=4. Порог невязки Vd равен 15, что также обеспечивает вероятность принятия одиночной цели за групповую на уровне 10-4.
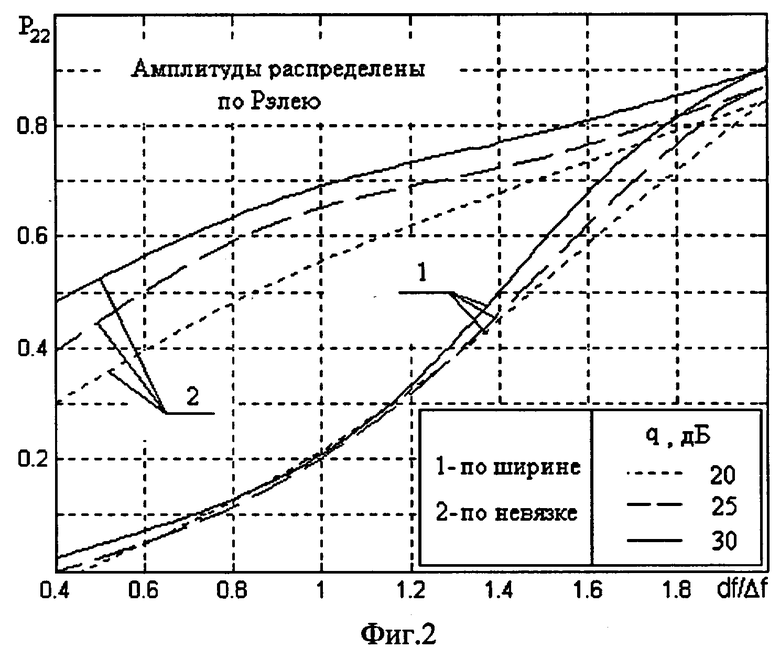
На фиг.1 и 2 приведены зависимости вероятности правильного определения двух целей Р22 от частотного разноса между сигналами df в случае, когда амплитуды сигналов постоянны и распределены по закону Рэлея соответственно, для величин отношения сигнал/шум q=20, 25 и 30 дБ. Графики 1 и 2 относятся к прототипу и предлагаемому способу соответственно. Зависимости получены методом математического моделирования, причем для построения одной точки графика выполнялось 1000 реализаций. Как следует из приведенных графиков, при df/Δf<1.2...1.4 эффективность предлагаемого способа относительно прототипа выше на 20...60% по вероятности Р22.
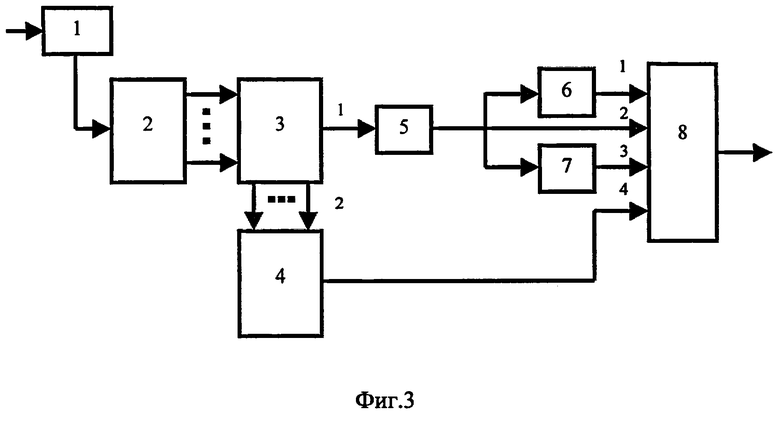
На фиг.3 представлен вариант технической реализаци предлагаемого способа. Устройство состоит из блока АЦП 1, вычислителя корреляционных сумм 2, коммутатора 3, вычислителя невязки 4, вычислителя амплитуды 5, вычислителя локального максимума 6, вычислителя интервала 7, вычислителя количества целей 8.
Устройство работает следующим образом. На вход блока АЦП 1 поступает аналоговый сигнал. Цифровые отсчеты сигнала поступают в вычислитель корреляционных сумм 2, на N выходах которого формируются комплексные величины корреляционных сумм, соответствующие равномерной сетке значений параметра разрешения fn, n=1...N. Выходы вычислителя корреляционных сумм 2 поступают на вход коммутатора 3. Работа коммутатора 3 управляется генератором тактовых импульсов так, что в каждый такт на первый выход коммутатора 3 поступает комплексный отсчет корреляционной суммы Y(fn), n=1...N. С первого выхода коммутатора 3 данные поступают на вход вычислителя амплитуды 5, на выходе которого формируется величина |Y(fn)|. С выхода вычислителя амплитуды 5 данные поступают на вход вычислителя локального максимума 6, вычислителя интервала 7 и вычислителя количества целей 8. Вычислитель локального максимума 6 на выходе формирует единицу в случае выполнения условия (2) и ноль в противном случае. Вычислитель интервала 7 на выходе формирует единицу, если отсчет fn принадлежит интервалу [ai, bi] (i=1...I), и ноль - в противном случае. С выходов вычислителя локального максимума 6, вычислителя амплитуды 5 и вычислителя интервала 7 данные поступают на первый, второй и третий входы вычислителя количества целей 8.
Вычислитель количества целей 8 содержит: регистр количества целей, регистр количества целей на интервале, регистр позиции локального максимума и регистр позиции интервала. В начале работы в регистры заносятся нулевые значения.
При переключении третьего входа вычислителя количества целей 8 с нуля в единицу происходит обнуление регистра количества целей на интервале, а в регистр позиции интервала заносится номер n текущей позиции. При поступлении на первый вход вычислителя количества целей 8 единицы, значение регистра количества целей на интервале увеличивается на единицу.
При переключении третьего входа вычислителя количества целей 8 с единицы в ноль производятся следующие действия. Если значение регистра количества целей на интервале больше единицы, то значение регистра количества целей увеличивается на значение регистра количества целей на интервале. Если значение регистра количества целей на интервале равно единице, то вычисляется ширина интервала и сравнивается с пороговой шириной. Если выполняется соотношение (3), то значение регистра количества целей увеличивается на два. В противном случае на второй группе выходов коммутатора 3 формируются комплексные значения Ym, m=l...M, в соответствии с формулой (4). Данные со второй группы выходов коммутатора 3 поступают на входы вычислителя невязки 4, который производит вычисление невязки D по формуле (4). При этом минимум величины невязки определяются для дискретных значений параметра разрешения f с малым шагом, равным 0,005Δf, а величины Sm(f), m=l...M, предварительно вычисляются и хранятся в постоянном запоминающем устройстве. С выхода вычислителя невязки 4 величина D поступает на четвертый вход вычислителя количества целей 8. Если D<Vd, то значение регистра количества целей увеличивается на единицу. Если D≥Vd, то значение регистра количества целей увеличивается на два.
Таким образом, предлагаемый способ определения количества целей в группе позволяет повысить вероятность правильной оценки числа целей в группе в условиях, когда значения параметров разрешения, соответствующие сигналам целей, отличаются на величину, меньшую размера элемента разрешения.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Коновалов Л.Н. Определение числа сигналов методом проверки сложных гипотез по критерию отношения правдоподобия/Изв. вуз. Радиоэлектроника, 1988, том 31, N 7, с.18...25 (аналог).
2. Кобызев И.Н. Мера разрешения радиолокационных сигналов по одному параметру.// Зарубежная радиоэлектроника, 1992, №10 (прототип).
3. Многофункциональные радиоэлектронные комплексы истребителей./ Под. ред. Г.С.Кондратенкова. - М.: Военное издательство, 1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА ЦЕЛЕЙ В ГРУППЕ | 2013 |
|
RU2540951C1 |
| СПОСОБ АДАПТИВНОГО ЦИФРОВОГО ОБНАРУЖЕНИЯ СИГНАЛОВ | 2002 |
|
RU2237258C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ | 1999 |
|
RU2154837C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ РАННЕЙ ЭЛЕКТРОЭНЦЕФАЛОГРАФИЧЕСКОЙ ДИАГНОСТИКИ БОЛЕЗНИ ПАРКИНСОНА | 2012 |
|
RU2484766C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
Изобретение относится к радиолокации и может быть использовано в радиолокационной технике для определения количества целей в группе в условиях. Технический результат заключается в повышении вероятности правильной оценки количества целей в группе. Способ заключается в том, что выполняют аналого-цифровое преобразование отраженного от целей и принятого сигнала, вычисляют комплексные корреляционные суммы выборки принятого сигнала и опорных квадратурных сигналов при значениях параметра разрешения опорных сигналов, взятых на равномерной сетке, максимальные по ширине интервалы значений параметра разрешения, внутри которых все модули корреляционных сумм превышают порог обнаружения, определяют локальные максимумы модулей корреляционных сумм, принимают решение о соответствии каждого локального максимума одной цели в тех интервалах, внутри которых количество локальных максимумов более одного, вычисляют ширину интервала, внутри которого находится один локальный максимум, принимают решение о соответствии одного локального максимума двум целям в случае, если ширина интервала больше пороговой ширины, в противном случае вычисляют минимальную квадратичную невязку отсчетов комплексных корреляционных сумм и отсчетов эталонных корреляционных сумм сигнала одной цели, принимают решение о соответствии локального максимума внутри интервала одной цели в случае, если невязка меньше порога невязки, и двум целям - в противном случае. 3 ил.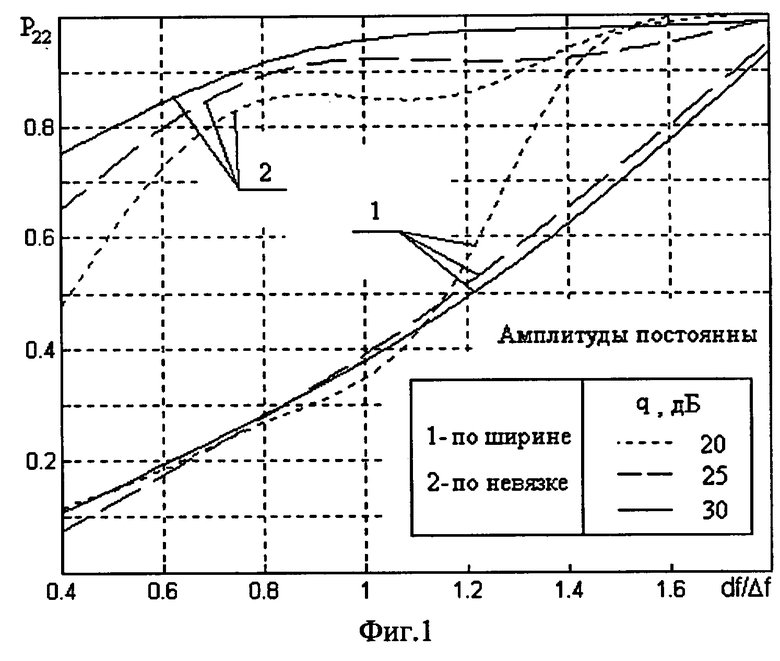
Способ определения количества целей в группе, заключающийся в том, что выполняют аналого-цифровое преобразование отраженного от целей и принятого сигнала, вычисляют комплексные корреляционные суммы выборки принятого сигнала и опорных квадратурных сигналов при значениях параметра разрешения опорных сигналов, взятых на равномерной сетке fn, n=1...N, где N - количество точек сетки, в области обнаружения с постоянным шагом, меньшим размера элемента разрешения, определяют максимальные по ширине интервалы значений параметра разрешения, внутри которых все модули корреляционных сумм превышают порог обнаружения, определяют локальные максимумы модулей корреляционных сумм 
где J - их количество внутри интервалов, принимают решение о соответствии каждого локального максимума одной цели в тех интервалах, внутри которых количество локальных максимумов более одного, вычисляют ширину интервала, внутри которого находится один локальный максимум, принимают решение о соответствии одного локального максимума двум целям в случае, если ширина интервала больше пороговой ширины, зависящей от превышения значения локального максимума над порогом, отличающийся тем, что в случае, если ширина интервала меньше пороговой ширины, вычисляют минимальную квадратичную невязку D отсчетов комплексных корреляционных сумм и отсчетов эталонных корреляционных сумм сигнала одной цели по формуле
где f - параметр разрешения;
[fa, fb] - интервал параметра разрешения;
σ - среднеквадратическое отклонение квадратурных составляющих корреляционных сумм, обусловленное наличием шумов;
Ym=Y(fm+n);
m=1...M, М - четное;
при

при



Sm(f) - значения эталонных корреляционных сумм сигнала одной цели с параметром разрешения, равным f, вычисленные в тех же точках, что и величины Ym, m=1...М,
принимают решение о соответствии локального максимума внутри интервала [fa, fb] одной цели в случае, если D<Vd, и двум целям - если D≥Vd, где Vd - порог невязки, выбираемый по уровню вероятности принятия одиночной цели за групповую.
| КОБЫЗЕВ И.Н | |||
| Мера разрешения радиолокационных сигналов по одному параметру | |||
| Зарубежная радиоэлектроника | |||
| Пуговица для прикрепления ее к материи без пришивки | 1921 |
|
SU1992A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА РАЗРЕШАЕМЫХ ВОЗДУШНЫХ ЦЕЛЕЙ В ГРУППЕ | 1993 |
|
RU2080617C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧИСЛА РАЗРЕШАЕМЫХ ВОЗДУШНЫХ ЦЕЛЕЙ В ГРУППЕ | 1999 |
|
RU2158005C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1998 |
|
RU2137152C1 |
| US 5587929 А, 24.12.1996 | |||
| Снегомусороуборочная машина для очистки железнодорожных путей | 1973 |
|
SU530088A1 |
| СПОСОБ ПОЛУЧЕНИЯ ТКАНЕИНЖЕНЕРНОЙ КОНСТРУКЦИИ | 2016 |
|
RU2661738C2 |

