Изобретение относится к радиолокации и может быть использовано в бортовых, наземных и корабельных радиолокационных станциях (РЛС) для установления факта наличия групповой цели в импульсном объеме.
Известен способ обнаружения групповой цели [Патент РФ №2106653 от 10.03.1998 г., МПК G01S 7/292]. В данном способе задача обнаружения групповой цели решается на основе явления взаимного подавления перекрывающихся сигналов при их сжатии после ограничения. Указанный результат достигается тем, что в известном способе обработки радиолокационного сигнала, основанном на весовой обработке принятого колебания и сравнении его с порогом U0, дополнительно проводят весовую обработку колебания после его ограничения. Решение об обнаружении групповой цели принимают, если уровень сигнала после основной обработки достигает значения U0i, а после дополнительной - ниже уровня U∂i, соответствующего значению U0i.
Недостатком способа является то, что для принятия решения об обнаружении групповой цели необходимо наличие дополнительного канала обработки, что усложняет техническую реализацию способа. Кроме того, предусматривается обработка сигнала в режиме с ограничением, который приводит к дополнительным потерям, искажению фазовой структуры принятого сигнала и снижению вероятности обнаружения групповой цели.
Наиболее близким техническим решением является способ обнаружения групповой цели [Патент США №4536764 от 20.08.85 г. МПК G01S 7/28, 13/52]. Сущность способа заключается в том, что выделяют квадратурные составляющие комплексной огибающей принятого антенной сигнала, в каждой квадратурной составляющей осуществляют преобразование сигнала в цифровую форму в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, подвергают полученные в результате суммирования N отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму N-точечного быстрого преобразования Фурье (БПФ), вычисляют модуль комплексной огибающей сигнала на выходе доплеровских фильтров БПФ, в стробе дальности kmax выбирают множество смежных доплеровских фильтров, определяют первую доплеровскую частоту f1 из названного множества смежных доплеровских фильтров как частоту фильтра jmax1 с максимальной амплитудой сигнала, выбирают первое подмножество множества смежных доплеровских фильтров R1 с центром около выбранной первой доплеровской частоты f1, получают величину первого порога путем перемножения амплитуды сигнала первой доплеровской частоты f1 с первым множителем, меньшим единицы, в первом подмножестве множества смежных доплеровских фильтров R1, определяют группы амплитуд сигналов, превысивших первый порог, разделяют полученные группы амплитуд сигналов на кластеры, ширина которых ограничена предварительно определенным числом амплитуд сигналов смежных доплеровских частот, подсчитывают количество кластеров для получения первого счета С1, ослабляют путем бланкирования амплитуды сигналов первой доплеровской частоты f1 и группы доплеровских частот, расположенных вблизи, определяют вторую доплеровскую частоту f2 как частоту фильтра jmax2 с максимальной амплитудой сигнала среди неослабленных сигналов из первого подмножества множества смежных доплеровских фильтров R1, выбирают второе подмножество множества смежных доплеровских фильтров R2 с центром около выбранной второй доплеровской частоты f2, получают величину второго порога путем перемножения амплитуды сигнала второй доплеровской частоты f2 со вторым множителем, если первый счет С1 меньше или равен единице, или путем перемножения амплитуды сигнала второй доплеровской частоты f2 с первым множителем, если первый счет C1 больше единицы, затем во втором подмножестве множества смежных доплеровских фильтров R2 определяют группы амплитуд сигналов, превысивших второй порог, разделяют полученные группы амплитуд сигналов на кластеры, ширина которых ограничена предварительно определенным числом амплитуд сигналов смежных доплеровских частот, подсчитывают количество кластеров для получения второго счета С2, вычисляют промежуточный счет в соответствии с математическим выражением
C=C1-|C2-C1|+1,
приравнивают далее окончательный счет к промежуточному счету С, если полученный промежуточный счет С больше или равен единице, либо приравнивают окончательный счет к единице, если полученный промежуточный счет С меньше единицы, принимают решение об обнаружении групповой цели в стробе дальности, если полученный окончательный счет больше единицы.
Недостатком способа-прототипа является невысокая вероятность обнаружения групповой цели в стробе дальности, доплеровские частоты сигналов которой совпадают. Связано это с тем, что разрешающая способность способа-прототипа определяется шириной кластера (шириной группы смежных доплеровских фильтров), которая принципиально не может быть меньше ширины одного-трех доплеровских фильтров. Таким образом, если доплеровские частоты сигналов групповой цели совпадают, то при выполнении операции бланкирования (установки в нуль) амплитуд сигналов первой доплеровской частоты и группы доплеровских частот, расположенных вблизи, информация о том, что цель групповая, может быть потеряна. Это является причиной невысокой вероятности обнаружения групповой цели, доплеровские частоты сигналов которой совпадают.
Задачей изобретения является: повысить вероятность обнаружения групповой цели в стробе дальности, доплеровские частоты сигналов которой совпадают, и отсутствует разрешение по угловым координатам.
Решение задачи заключается в том, что после определения в стробе дальности kmax доплеровской частоты f1 как частоты фильтра jmax1 с максимальной амплитудой сигнала, для всех стробов дальности определяют коэффициент ослабления амплитуды сигнала по стробам bk, равный отношению амплитуды сигнала в фильтре jmax1 k-го строба  к амплитуде сигнала в фильтре jmax1 строба kmax
к амплитуде сигнала в фильтре jmax1 строба kmax 
находят квадратурные составляющие напряжений  равные разностям модулей соответствующих квадратурных составляющих сигнала в фильтре jmax1 k-го строба и произведений, найденных коэффициентов ослабления амплитуды сигнала по стробам bk, на модули соответствующих квадратурных составляющих сигнала в фильтре jmax1 строба kmax:
равные разностям модулей соответствующих квадратурных составляющих сигнала в фильтре jmax1 k-го строба и произведений, найденных коэффициентов ослабления амплитуды сигнала по стробам bk, на модули соответствующих квадратурных составляющих сигнала в фильтре jmax1 строба kmax:


получают амплитуду напряжения  как
как

сравнивают полученную амплитуду напряжения  с порогом обнаружения η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения групповой цели, принимают решение об обнаружении групповой цели при превышении порога хотя бы в одном стробе дальности.
с порогом обнаружения η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения групповой цели, принимают решение об обнаружении групповой цели при превышении порога хотя бы в одном стробе дальности.
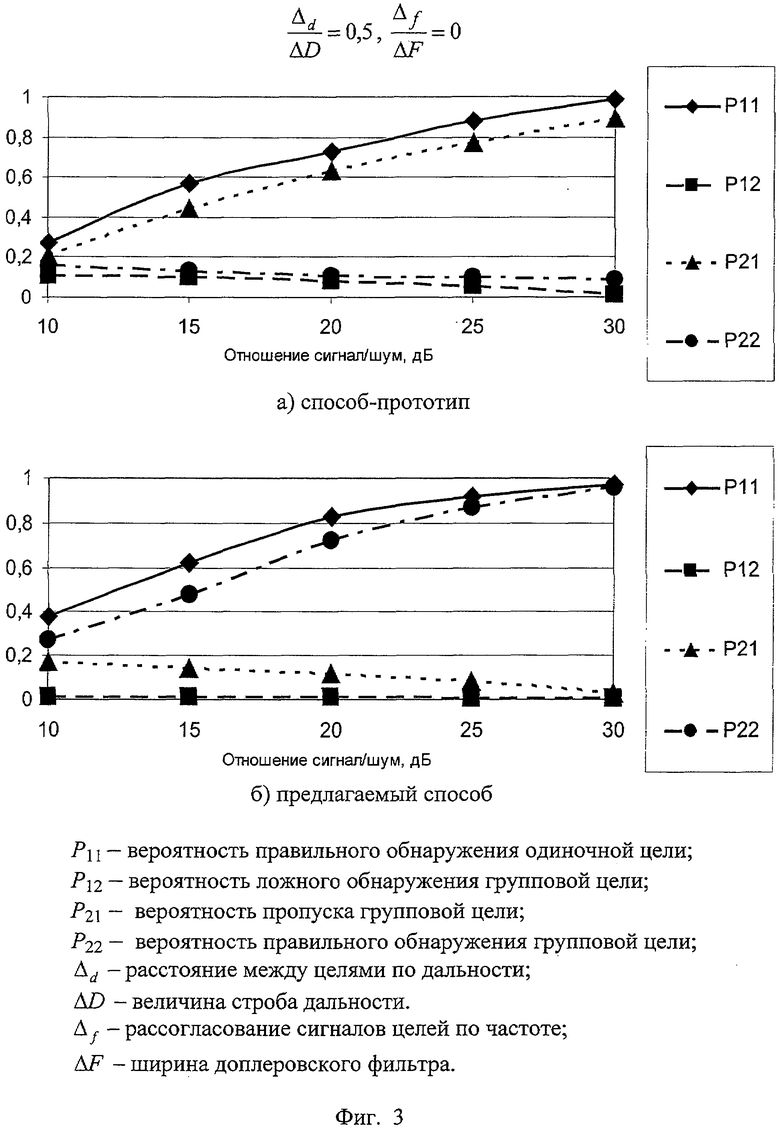
Изобретение поясняется чертежами. На фиг.1 изображена структурная схема устройства, реализующего предлагаемый способ обнаружения групповой цели, где 1 - фазовый детектор, 2 - фильтр нижних частот, 3 - аналого-цифровой преобразователь, 4 - сумматор, 5 - антенна, 6 - приемник, 7 - гетеродин, 8 - процессор обработки сигналов, 9 - фазовращатель на 90°. На фиг.2 представлена схема, поясняющая последовательность преобразования сигнала в процессоре обработки сигналов 8. На фиг.3 приведены диаграммы, показывающие изменения показателей эффективности обнаружения групповой цели при использовании предлагаемого способа по сравнению со способом-прототипом, где P11 - вероятность правильного обнаружения одиночной цели, Р12 - вероятность ложного обнаружения групповой цели, Р21 - вероятность пропуска групповой цели, P22 - вероятность правильного обнаружения групповой цели, Δd - расстояние между одиночными целями из состава групповой по дальности, ΔD - величина строба дальности, Δf - рассогласование сигналов целей по частоте, ΔF - ширина доплеровского фильтра. На фиг.3 представлены зависимости показателей эффективности от отношения сигнал/шум при относительном расстоянии одиночных целей из состава групповой по дальности  и относительном рассогласований сигналов целей по частоте
и относительном рассогласований сигналов целей по частоте 
Суть изобретения состоит в следующем. Для варианта одиночной цели коэффициенты ослабления амплитуды сигнала по стробам bk, вычисленные согласно (1), равны:

где  - комплексная амплитуда сигнала цели;
- комплексная амплитуда сигнала цели;
 - комплексная частотная характеристика доплеровского фильтра с номером jmax;
- комплексная частотная характеристика доплеровского фильтра с номером jmax;
f - доплеровская частота сигнала цели;
Fk(t) - значение корреляционной функции закона амплитудной модуляции сигнала цели с весовой функцией сумматора в k-м стробе дальности;
Fkmax(t) - значение корреляционной функции закона амплитудной модуляции сигнала цели с весовой функцией сумматора в стробе дальности kmax;
t - время запаздывания сигнала цели.
Квадратурные составляющие сигналов на выходах стробов дальности в этом случае описываются следующими выражениями:




Подстановка (5)-(9) в (2) и (3) позволяет получить квадратурные составляющие сигналов на выходах стробов дальности в виде


Как следует из (4), (10), (11), величина амплитуды напряжения  в случае одиночной цели равна нулю. Для варианта групповой (например, парной) цели коэффициент ослабления амплитуды сигнала по стробам bk зависит не только от корреляционных функций Fk(t), Fkmax(t), но и от комплексных амплитуд
в случае одиночной цели равна нулю. Для варианта групповой (например, парной) цели коэффициент ослабления амплитуды сигнала по стробам bk зависит не только от корреляционных функций Fk(t), Fkmax(t), но и от комплексных амплитуд  :
:

Соответственно квадратурные составляющие напряжений  и
и  отличны от нуля:
отличны от нуля:

Таким образом, величина амплитуды напряжения характеризует состав цели (одиночная или групповая) и является показателем обнаружения групповой цели. При наличии внутреннего шума приемника для принятия решения необходимо амплитуду напряжения сравнить с порогом обнаружения η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения групповой цели, например, в соответствии с выражением

где μ - постоянный коэффициент;
μ0 - порог обнаружения одиночной цели.
Осуществить предлагаемый способ обработки возможно в импульсно-доплеровской РЛС. Один из возможных вариантов структурной схемы устройства, реализующего предлагаемый способ обнаружения групповой цели, представлен на фиг.1. Принятый антенной 5 сигнал поступает на вход приемника 6. Для обеспечения когерентной обработки сигнал с выхода приемника 6 с помощью двух фазовых детекторов 1, гетеродина 7, фазовращателя на 90° 9 и двух фильтров нижних частот 2 разделяется на квадратурные составляющие. В аналого-цифровых преобразователях 3 производится формирование последовательности цифровых отсчетов квадратурных составляющих сигнала. Далее, в сумматорах 4 осуществляется суммирование цифровых отсчетов квадратурных составляющих сигнала. Суммирование производится в пределах интервала, равного длительности зондирующего импульса.
Вся дальнейшая обработка сигнала происходит в процессоре обработки сигналов 8. На фиг.2 представлена схема, поясняющая последовательность преобразования сигнала в процессоре обработки сигналов 8. Полученные в результате суммирования отсчеты подвергают амплитудному взвешиванию и осуществляют фильтровую обработку по алгоритму БПФ. Затем вычисляют модуль комплексной огибающей сигнала на выходе доплеровских фильтров. Далее в стробе дальности kmax выбирают множество смежных доплеровских фильтров. Из выбранного множества смежных доплеровских фильтров определяют доплеровскую частоту f1 как частоту фильтра jmax1 с максимальной амплитудой сигнала. Для всех стробов дальности вычисляют коэффициент ослабления амплитуды сигнала по стробам bk согласно соотношению (1). Далее в процессоре обработки сигналов 8 в соответствии с выражениями (2) и (3) вычисляют квадратурные составляющие напряжений  и рассчитывают амплитуду напряжения
и рассчитывают амплитуду напряжения  величина которой характеризует состав цели (одиночная или групповая), согласно (4). Затем амплитуду напряжения
величина которой характеризует состав цели (одиночная или групповая), согласно (4). Затем амплитуду напряжения  сравнивают с порогом обнаружения η. При превышении порога хотя бы в одном стробе дальности принимают решение об обнаружении групповой цели.
сравнивают с порогом обнаружения η. При превышении порога хотя бы в одном стробе дальности принимают решение об обнаружении групповой цели.
Подтверждение возможности получения вышеуказанного технического результата при осуществлении предлагаемого способа проводилось с помощью математического моделирования.
В качестве показателя эффективности предлагаемого способа вводится матрица Р вероятностей исходов обработки сигналов. Элементом Рnm матрицы Р является вероятность того, что при наличии одиночной (n=1) или групповой (n=2) цели будет принято решение о наличии одиночной (m=1) или групповой (m=2) цели. Вероятности Р11 и Р22 являются вероятностями принятия правильных решений, а Р12 и Р21 - ошибочных решений.
На фиг.3 приведены оценки значений элементов матрицы Р при использовании предлагаемого способа обработки и способа-прототипа для одно- и двухцелевых ситуаций и различных отношений сигнал/шум.
Анализ графических зависимостей, приведенных на фиг.3, позволяет сделать вывод о повышении вероятности правильного обнаружения групповой цели P22 при использовании предлагаемого способа по сравнению со способом-прототипом в 2-10 раз в зависимости от отношения сигнал/шум. Выигрыш тем значительнее, чем выше отношение сигнал/шум. Например, в наиболее сложных условиях обнаружения групповой цели, когда относительное расстояние между целями по дальности  и относительное рассогласований сигналов целей по частоте
и относительное рассогласований сигналов целей по частоте  вероятность правильного обнаружения Р22 для предлагаемого способа в зависимости от отношения сигнал/шум составляет 0,2-0,9, а для способа-прототипа - не превышает 0,1.
вероятность правильного обнаружения Р22 для предлагаемого способа в зависимости от отношения сигнал/шум составляет 0,2-0,9, а для способа-прототипа - не превышает 0,1.
Использование изобретения в бортовых, наземных и корабельных РЛС не потребует изменения их принципов построения, режимов работы, существенных вычислительных затрат и позволит с высокой достоверностью обнаруживать групповую цель, сигналы которой находятся в пределах одного строба дальности при отсутствии разрешения отдельных целей в группе по угловым координатам и скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2009 |
|
RU2407034C9 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2293349C1 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛИ НА ФОНЕ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2009 |
|
RU2411537C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2008 |
|
RU2379704C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2006 |
|
RU2316788C9 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ ЗА ОДИН ПЕРИОД ИЗЛУЧЕНИЯ И ПРИЕМА ПАЧКИ РАДИОИМПУЛЬСОВ | 2021 |
|
RU2782574C1 |
| Способ радиолокационной съёмки Земли и околоземного пространства радиолокатором с синтезированной апертурой антенны в неоднозначной по дальности полосе с селекцией движущихся целей на фоне отражений от подстилающей поверхности и радиолокатор с синтезированной апертурой антенны для его реализации | 2019 |
|
RU2740782C1 |

Изобретение относится к радиолокации и может быть использовано в бортовых, наземных и корабельных РЛС. Техническим результатом является повышение вероятности обнаружения групповой цели, сигналы которой не разрешаются по дальности, скорости и угловым координатам. Для этого выделяют квадратурные составляющие комплексной огибающей принятого антенной сигнала, в каждой квадратурной составляющей осуществляют преобразование сигнала в цифровую форму в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, подвергают полученные в результате суммирования N отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму N-точечного быстрого преобразования Фурье (БПФ), вычисляют модуль комплексной огибающей сигнала на выходе доплеровских фильтров БПФ, в стробе дальности выбирают множество смежных доплеровских фильтров, определяют первую доплеровскую частоту из названного множества смежных доплеровских фильтров как частоту фильтра с максимальной амплитудой сигнала, при этом для всех стробов дальности определяют коэффициент ослабления амплитуды сигнала по стробам, находят квадратурные составляющие напряжений, получают амплитуду напряжения, сравнивают полученную амплитуду напряжения с порогом обнаружения, принимают решение об обнаружении групповой цели при превышении порога хотя бы в одном стробе дальности. 3 ил.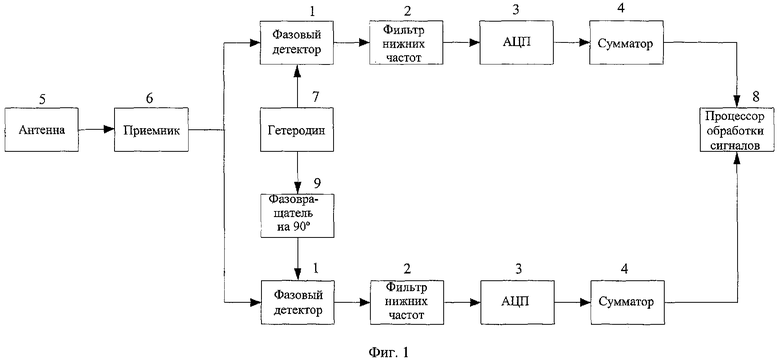
Способ обнаружения групповой цели, заключающийся в том, что выделяют квадратурные составляющие комплексной огибающей принятого антенной сигнала, в каждой квадратурной составляющей осуществляют преобразование сигнала в цифровую форму, в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, подвергают полученные в результате суммирования N отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму N-точечного быстрого преобразования Фурье (БПФ), вычисляют модуль комплексной огибающей сигнала на выходе доплеровских фильтров БПФ, в стробе дальности kmax выбирают множество смежных доплеровских фильтров, определяют первую доплеровскую частоту f1 из названного множества смежных доплеровских фильтров как частоту фильтра jmax1 с максимальной амплитудой сигнала, отличающийся тем, что для всех стробов дальности определяют коэффициент ослабления амплитуды сигнала по стробам bk, равный отношению амплитуды сигнала в фильтре jmax1 k-го строба  к амплитуде сигнала в фильтре jmax1 строба kmax
к амплитуде сигнала в фильтре jmax1 строба kmax  :
:

находят квадратурные составляющие напряжений 
 равные разностям модулей соответствующих квадратурных составляющих сигнала в фильтре jmax1 k-го строба и произведений, найденных коэффициентов ослабления амплитуды сигнала по стробам bk, на модули соответствующих квадратурных составляющих сигнала в фильтре jmax1 строба kmax:
равные разностям модулей соответствующих квадратурных составляющих сигнала в фильтре jmax1 k-го строба и произведений, найденных коэффициентов ослабления амплитуды сигнала по стробам bk, на модули соответствующих квадратурных составляющих сигнала в фильтре jmax1 строба kmax:


получают амплитуду напряжения  как
как
 ,
,
сравнивают полученную амплитуду напряжения с порогом обнаружения η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения групповой цели, принимают решение об обнаружении групповой цели при превышении порога хотя бы в одном стробе дальности.
| US 4536764 А, 20.08.1985 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВЫХ ОБЪЕКТОВ | 1999 |
|
RU2157550C1 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |
| US 4806936 A, 21.02.1989 | |||
| JP 2000180537 A, 30.06.2000. | |||

