Изобретение относится к радиолокации и может быть использовано в бортовых, наземных и корабельных импульсно-доплеровских радиолокационных станциях (РЛС) для установления факта наличия групповой цели в импульсном объеме.
Известен способ обнаружения групповой цели по патенту РФ №2157550 от 10.10.2000 г. МПК G01S 5/04, 3/72. Способ основывается на том, что различные методы пеленгования групповой цели дают несовпадающие пеленги. Для этого пеленгацию цели осуществляют одновременно несколькими известными методами пеленгации. Например, одноканальным и моноимпульсным, по направлению приема излучений бортовых радиоэлектронных средств и одноканальным или еще и моноимпульсным методом. Если разброс полученных значений пеленга, измеренных одновременно разными методами пеленгации, превышает пороговую величину, то принимают решение о наличии групповой цели.
Недостаток способа состоит в том, что вероятность обнаружения групповой цели существенно снижается с увеличением дальности до нее.
Известен также другой способ обнаружения групповой цели по патенту РФ №2143706 от 27.12.99 г. МПК G01S 3/22. Способ заключается в том, что в процессе обзора пространства РЛС по азимуту α осуществляют измерение сигналов пеленгационных ошибок по азимуту U'α и углу места U'β, преобразуют их в сигнал пеленгационной ошибки, величина и знак которого связаны с угловым рассогласованием по угломестной координате β соотношением
Uβ=U'β·cosγ-U'α·sinγ,
где γ - угол между плоскостью сканирования луча антенны РЛС и плоскостью пеленгации, фиксируют сигнал пеленгационной ошибки Uβ в начале Uβн и в конце Uβk пачки суммарного сигнала, формируют модуль разности ΔUβ сигналов Uβн и Uβк, служащий для обнаружения групповой цели
сравнивают ΔUβ с установленным пороговым значением, соответствующим аппаратурной ошибке РЛС Un, при превышении которого принимают решение об обнаружении групповой цели.
Недостатком способа, как и ранее рассмотренного, является зависимость вероятности правильного обнаружения групповой цели от дальности до нее.
Наиболее близким техническим решением является способ обнаружения групповой цели по патенту США №4536764 от 20.08.85 г. МПК G01S 7/28, 13/52. Способ основан на анализе амплитуд сигналов доплеровских частот в импульсно-доплеровской РЛС. Сущность способа заключается в том, что в стробе, в котором обнаружена (сопровождается) цель, выбирают несколько сигналов смежных доплеровских частот. Выбранные сигналы доплеровских частот обрабатывают в два прохода, причем каждый проход включает этапы поиска, порогового обнаружения и подсчета числа целей С1 и С2 соответственно. Затем вычисляют промежуточный счет С в соответствии с выражением

и приравнивают далее окончательный счет C0 к промежуточному счету С (С0=С), если полученный промежуточный счет С больше или равен единице (С≥1), либо приравнивают окончательный счет C0 к единице (C0=1), если полученный промежуточный счет С меньше единицы (С<1). Если полученный окончательный счет C0 больше единицы (C0>1), то принимают решение об обнаружении групповой цели.
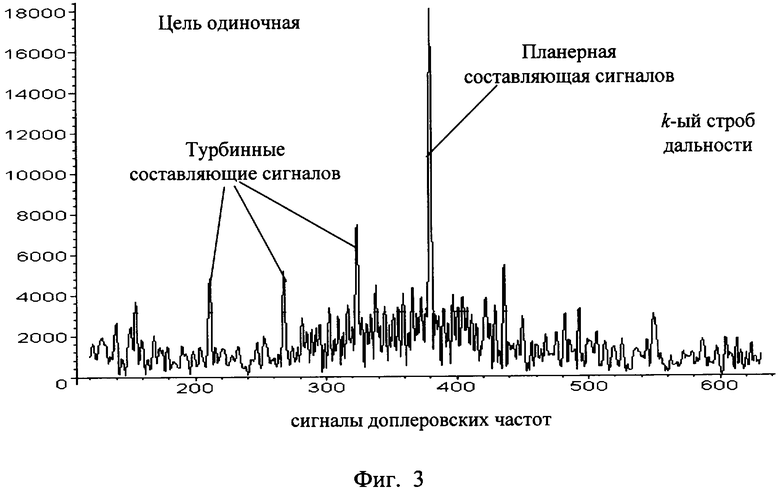
Недостатком способа-прототипа является невысокая вероятность обнаружения групповой или одиночной целей в условиях наличия в их спектре доплеровских частот интенсивных сигналов, обусловленных турбовинтовым эффектом (эхосигналы от винтов, лопаток турбин и т.д.). В способе-прототипе сигналы, обусловленные наличием данного эффекта, как и сигналы от планера («планерной составляющей»), могут попасть в анализируемое множество сигналов доплеровских частот и быть приняты за совокупность отдельных групповых или одиночных целей, что и приводит к невысокой вероятности обнаружения групповой или одиночной целей.
Задачей изобретения является обеспечение обнаружения групповой или одиночной целей с учетом наличия в их спектре доплеровских частот сигналов, обусловленных турбовинтовым эффектом (эхосигналы от винтов, лопаток турбин и т.д.).
Способ обнаружения групповой цели импульсно-доплеровской РЛС заключается в том, что выделяют квадратурные косинусную Sc(t) и синусную Ss(t) составляющие комплексной огибающей принятых антенной РЛС отраженных от цели сигналов, в каждой квадратурной составляющей осуществляют преобразование сигналов в цифровую форму  и
и 

 Tn - период повторения зондирующих импульсов, Δt - интервал дискретизации), формируют стробы дальности
Tn - период повторения зондирующих импульсов, Δt - интервал дискретизации), формируют стробы дальности  ,
, 
 (K - скважность зондирующих импульсов) путем суммирования цифровых отсчетов сигналов в пределах интервалов, равных длительности τзи зондирующего импульса, подвергают полученные в результате суммирования сигналы амплитудному взвешиванию, осуществляют фильтровую обработку сигналов по алгоритму БПФ, вычисляют модуль
(K - скважность зондирующих импульсов) путем суммирования цифровых отсчетов сигналов в пределах интервалов, равных длительности τзи зондирующего импульса, подвергают полученные в результате суммирования сигналы амплитудному взвешиванию, осуществляют фильтровую обработку сигналов по алгоритму БПФ, вычисляют модуль 
 (J - количество сигналов доплеровских частот на выходе фильтров БПФ) комплексной огибающей сигналов доплеровских частот на выходе фильтров БПФ. Выбирают далее сигнал с наибольшим значением модуля комплексной огибающей Ukj max и определяют соответствующий ему k-й строб дальности и сигнал доплеровской частоты jmax. Для всех сигналов доплеровских частот выбранного k-го строба дальности определяют коэффициенты ослабления
(J - количество сигналов доплеровских частот на выходе фильтров БПФ) комплексной огибающей сигналов доплеровских частот на выходе фильтров БПФ. Выбирают далее сигнал с наибольшим значением модуля комплексной огибающей Ukj max и определяют соответствующий ему k-й строб дальности и сигнал доплеровской частоты jmax. Для всех сигналов доплеровских частот выбранного k-го строба дальности определяют коэффициенты ослабления  комплексных амплитуд сигналов по частотам, равные отношению комплексных амплитуд сигналов j-х частот
комплексных амплитуд сигналов по частотам, равные отношению комплексных амплитуд сигналов j-х частот  к максимальной комплексной амплитуде сигнала частоты jmax
к максимальной комплексной амплитуде сигнала частоты jmax 
в смежном с k-м стробе дальности при помощи вычисленных коэффициентов формируют разность амплитуд сигналов Δj между комплексными амплитудами сигналов доплеровских частот и произведения максимальной комплексной амплитуды сигнала частоты jmax на соответствующие коэффициенты ослабления вида

сравнивают полученную разность амплитуд сигналов Δj пороговым значением амплитуды η, которое устанавливают исходя из требуемого значения вероятности ложного обнаружения групповой цели, при превышении порогового значения η хотя бы одним значением разности амплитуд сигналов Δj принимают решение об обнаружении групповой цели.
Поясним подробнее сущность изобретения. Для варианта одиночной цели комплексную амплитуду отраженного сигнала в k-м стробе дальности и j-м частотном фильтре при отсутствии шума можно записать в виде

где  - комплексная амплитуда сигнала на выходе доплеровского фильтра, обусловленная суммарным воздействием комплексных амплитуд планерной и турбинных составляющих сигнала цели на частотную характеристику j-го фильтра;
- комплексная амплитуда сигнала на выходе доплеровского фильтра, обусловленная суммарным воздействием комплексных амплитуд планерной и турбинных составляющих сигнала цели на частотную характеристику j-го фильтра;
Fk - величина, равная количеству дискретных отсчетов сигнала цели, приходящихся на k-й строб дальности.
При этом коэффициенты ослабления комплексной амплитуды сигнала по частотам, вычисленные в k-м стробе дальности, согласно (1), равны

Из выражения (4) видно, что в случае одиночной цели полученные коэффициенты определяются отношением комплексных амплитуд сигналов на выходе доплеровских фильтров и не зависят от того, в каком стробе дальности они получены. В смежном стробе дальности, например (k+1)-м, при помощи вычисленных коэффициентов (4) найдем разности между комплексными амплитудами сигналов в соответствии с выражением (2)

Из выражения (5) видно, что разности амплитуд сигналов Δj в данном случае будут равны нулю, поскольку для одиночной цели в любом стробе дальности комплексные амплитуды сигналов в доплеровских фильтрах компенсируются. Таким образом, для варианта одиночной цели при отсутствии шумов разности амплитуд сигналов Δj будут равны нулю.
В случае групповой цели выражение для сигнала в k-м стробе дальности и j-м частотном фильтре при отсутствии шума можно записать в виде
где  - комплексная амплитуда сигнала на выходе доплеровского фильтра, обусловленная суммарным воздействием комплексных амплитуд планерной и турбинных составляющих сигнала n-й цели на частотную характеристику j-го фильтра;
- комплексная амплитуда сигнала на выходе доплеровского фильтра, обусловленная суммарным воздействием комплексных амплитуд планерной и турбинных составляющих сигнала n-й цели на частотную характеристику j-го фильтра;
Fkn - величина, равная количеству дискретных отсчетов сигнала n-й цели, приходящихся на k-й строб дальности;
N - количество одиночных целей в составе групповой.
При этом коэффициенты ослабления комплексной амплитуды сигнала по частотам, вычисленные в k-м стробе дальности, согласно (1), равны
Из выражения (7) видно, что в случае групповой цели полученные коэффициенты определяются довольно сложной зависимостью. В частности, они теперь зависят от взаимного расположения n-го отраженного сигнала групповой цели относительно k-го строба дальности.
В смежном (k+1)-м стробе дальности при помощи вычисленных коэффициентов (7) найдем разности между комплексными амплитудами сигналов в соответствии с выражением (2)
Из выражения (8) видно, что разности амплитуд сигналов Δj в данном случае не будут равны нулю, поскольку зависимость коэффициентов от взаимного расположения n-го отраженного сигнала групповой цели относительно k-го строба дальности не позволяет скомпенсировать комплексные амплитуды сигналов на выходе доплеровских фильтров. Таким образом, для варианта групповой цели при отсутствии шумов разности амплитуд сигналов Δj не будут равны нулю. Это является отличительным признаком групповых и одиночных целей.
Изобретение поясняется чертежами на фиг.1-10. На фиг.1 изображена структурная схема импульсно-доплеровской РЛС, реализующей предлагаемый способ обнаружения групповой цели, где 1 - фазовый детектор, 2 - фильтр нижних частот, 3 - аналого-цифровой преобразователь, 4 - сумматор, 5 - антенна, 6 - приемник, 7 - гетеродин, 8 - процессор обработки сигналов.
На фиг.2 представлен алгоритм, поясняющий последовательность преобразования сигнала в процессоре обработки сигналов 8.
На фиг.3-10 приведены диаграммы экспериментальных данных, доказывающие работоспособность способа.
Осуществить предлагаемый способ обработки возможно в импульсно-доплеровской РЛС. Один из возможных вариантов структурной схемы устройства, реализующего предлагаемый способ обнаружения групповой цели, представлен на фиг.1. На схеме импульсно-доплеровской РЛС антенная система 5 последовательно соединена с приемником сигналов 6. Выходной сигнал приемника 6 с помощью двух фазовых детекторов 1, гетеродина 7 и фазовращателя на 90° 9 делится на два квадратурных канала. Каждый квадратурный канал содержит последовательно соединенные фазовый детектор 1, фильтр нижних частот 2, АЦП 3 и сумматор 4. Выходы квадратурных каналов, т.е. сумматоров 4, соединены с процессором обработки сигналов 8. Процессор обработки сигналов 8 функционирует в соответствии с заранее заложенной в него программой.
Обнаружение групповой цели импульсно-доплеровской РЛС происходит следующим образом. Принятые антенной 5 сигналы поступают на вход приемника 6. Для обеспечения когерентной обработки сигналы с выхода приемника 6 с помощью двух фазовых детекторов 1, гетеродина 7, фазовращателя на 90° 9 и двух фильтров нижних частот 2 разделяются на квадратурные косинусную Sc(t) и синусную Ss(t) составляющие. В аналого-цифровых преобразователях 3 производится формирование последовательности цифровых отсчетов квадратурных составляющих сигналов  и
и 
 Tn - период повторения зондирующих импульсов, Δt - интервал дискретизации). Далее формируются стробы дальности
Tn - период повторения зондирующих импульсов, Δt - интервал дискретизации). Далее формируются стробы дальности  ,
, 
 (K - скважность зондирующих импульсов) путем суммирования отсчетов сигналов в сумматорах 4. Суммирование производится в пределах интервалов, равных длительности τзи зондирующего импульса РЛС.
(K - скважность зондирующих импульсов) путем суммирования отсчетов сигналов в сумматорах 4. Суммирование производится в пределах интервалов, равных длительности τзи зондирующего импульса РЛС.
Вся дальнейшая обработка сигнала происходит в процессоре обработки сигналов 8. На фиг.2 представлена схема, поясняющая последовательность преобразования сигналов в процессоре обработки сигналов 8. Полученные в результате суммирования сигналы подвергают амплитудному взвешиванию и осуществляют фильтровую обработку по алгоритму БПФ, а затем вычисляют модуль комплексной огибающей сигналов доплеровских частот на выходе фильтров БПФ  ,
,  (J - количество сигналов доплеровских частот на выходе фильтров БПФ). Далее выбирают сигнал с наибольшим значением модуля комплексной огибающей Ukj max и определяют соответствующий ему k-й строб дальности и сигнал доплеровской частоты jmax. В процессоре обработки сигналов 8 для всех сигналов доплеровских частот выбранного k-го строба дальности определяют коэффициенты ослабления комплексных амплитуд сигналов по частотам, в соответствии с выражением (1). Затем в смежном стробе дальности (например, k+1-м) при помощи вычисленных коэффициентов ослабления амплитуды сигнала формируют разности амплитуд сигналов Δj по формуле (2). Полученные разности амплитуд сигналов Δj сравнивают с пороговым значением амплитуды сигнала η, которое устанавливают исходя из требуемого значения вероятности ложного обнаружения групповой цели. При превышении порогового значения η хотя бы одной разностью амплитуд сигналов Δj принимают решение об обнаружении групповой цели.
(J - количество сигналов доплеровских частот на выходе фильтров БПФ). Далее выбирают сигнал с наибольшим значением модуля комплексной огибающей Ukj max и определяют соответствующий ему k-й строб дальности и сигнал доплеровской частоты jmax. В процессоре обработки сигналов 8 для всех сигналов доплеровских частот выбранного k-го строба дальности определяют коэффициенты ослабления комплексных амплитуд сигналов по частотам, в соответствии с выражением (1). Затем в смежном стробе дальности (например, k+1-м) при помощи вычисленных коэффициентов ослабления амплитуды сигнала формируют разности амплитуд сигналов Δj по формуле (2). Полученные разности амплитуд сигналов Δj сравнивают с пороговым значением амплитуды сигнала η, которое устанавливают исходя из требуемого значения вероятности ложного обнаружения групповой цели. При превышении порогового значения η хотя бы одной разностью амплитуд сигналов Δj принимают решение об обнаружении групповой цели.
Подтверждение возможности получения вышеуказанного технического результата при осуществлении предлагаемого способа проводилось по экспериментальным данным (фиг.3-10).
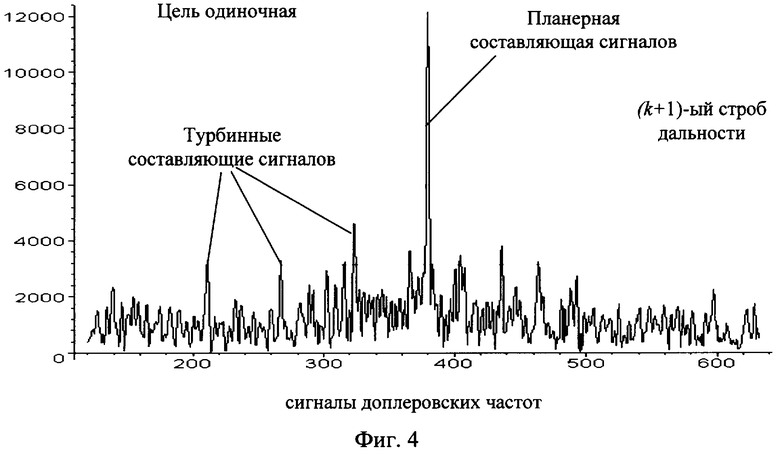
На фиг.3 представлены сигналы доплеровских частот одиночной цели в k-м стробе дальности. На фиг.4 показаны сигналы доплеровских частот той же одиночной цели в (k+1)-м стробе дальности. На фиг.5 показаны разности амплитуд сигналов А, вычисленные по формуле (2) в (k+1)-м стробе дальности. Представленные разности амплитуд сигналов Δj были вычислены для сигналов доплеровских частот одиночной цели, представленных на фиг.3, 4. Коэффициенты ослабления комплексной амплитуды сигнала по частотам определялись, согласно соотношению (1), по сигналам доплеровских частот одиночной цели в k-м стробе дальности. Из фиг.5 видно, что разности амплитуд сигналов Δj ниже порогового значения амплитуды η.
Поэтому в соответствии с предлагаемым способом будет принято решение об обнаружении одиночной цели, что соответствует действительности.
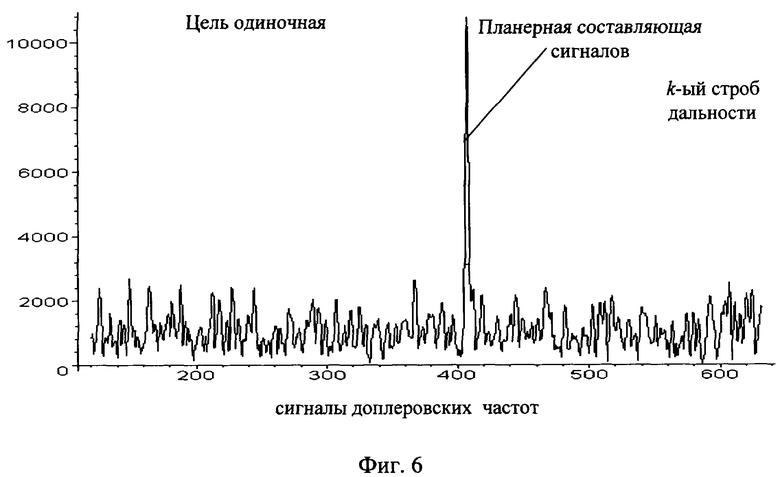
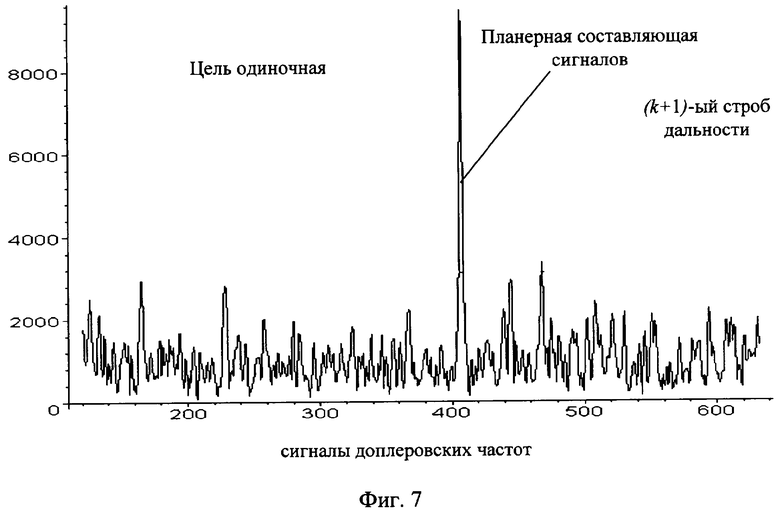
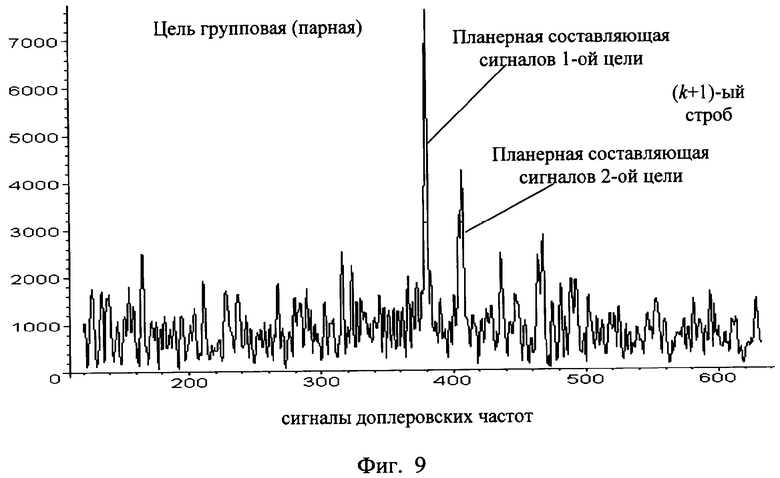
Для проверки работоспособности способа при наличии групповой цели программным образом были объединены сигналы доплеровских частот одиночной цели, изображенные на фиг.6, 7 с сигналами доплеровских частот одиночной цели, изображенными на фиг.3, 4 в k-м и в (k+1)-м стробах дальности соответственно. Полученные в результате такого объединения сигналы доплеровских частот групповой (парной) цели в k-м и в (k+1)-м стробах дальности показаны на фиг.8, 9 соответственно. Вычисленные по формуле (2) разности амплитуд сигналов Δj в (k+1)-м стробе дальности представлены на фиг.10. Из фиг.10 видно, что одна из разностей амплитуд сигналов Δj превысила пороговое значение амплитуды η, поэтому в соответствии с предлагаемым способом будет принято решение об обнаружении групповой цели, что также соответствует действительности.
Использование изобретения в бортовых, наземных и корабельных импульсно-доплеровских РЛС не потребует изменения их принципов построения, режимов работы, а также существенных вычислительных затрат и позволит обнаруживать групповую или одиночную цели в условиях наличия в их спектре доплеровских частот сигналов, обусловленных турбовинтовым эффектом (эхосигналы от винтов, лопаток турбин и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2298806C9 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2009 |
|
RU2407034C9 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛИ НА ФОНЕ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2009 |
|
RU2411537C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2293349C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2008 |
|
RU2379704C1 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2323452C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ ЗА ОДИН ПЕРИОД ИЗЛУЧЕНИЯ И ПРИЕМА ПАЧКИ РАДИОИМПУЛЬСОВ | 2021 |
|
RU2782574C1 |



Изобретение относится к радиолокации и может быть использовано для установления факта наличия групповой цели в импульсном объеме. Достигаемым техническим результатом является повышение вероятности обнаружения групповой или одиночной целей с учетом турбовинтового эффекта. В основу способа положен принцип компенсации сигнала, если он образован одиночной целью при наличии только эхо-сигнала от планера и появлении нескомпенсированных остатков, если эхо-сигнал образован групповой целью или одиночной целью с учетом отражений как от планера, так и от лопаток турбин или винтов летательного аппарата. Для этого осуществляют совместную корреляционно-фильтровую обработку принятого антенной сигнала в стробах дальности и доплеровских фильтрах. Различия в комплексных амплитудах выявляются путем сравнения весовых коэффициентов комплексных амплитуд сигналов по доплеровским частотам в каждом из текущих стробов дальности. При различиях этих коэффициентов, превышающих некоторое пороговое значение, принимается решение о правильном обнаружении групповой цели. 10 ил.
Способ обнаружения групповой цели импульсно-доплеровской радиолокационной станцией (РЛС), заключающийся в том, что выделяют квадратурные косинусную Sс(t) и синусную Ss(t) составляющие комплексной огибающей принятых антенной РЛС отраженных от цели сигналов, в каждой квадратурной составляющей осуществляют преобразование сигналов в цифровую форму  и
и  ,
,  Тn - период повторения зондирующих импульсов, Δt - интервал дискретизации), формируют стробы дальности
Тn - период повторения зондирующих импульсов, Δt - интервал дискретизации), формируют стробы дальности  ,
,  (К -скважность зондирующих импульсов) путем суммирования цифровых отсчетов сигналов в пределах интервалов, равных длительности τзи зондирующего импульса, подвергают полученные в результате суммирования сигналы амплитудному взвешиванию, осуществляют фильтровую обработку сигналов по алгоритму быстрого преобразования Фурье (БПФ), вычисляют модуль
(К -скважность зондирующих импульсов) путем суммирования цифровых отсчетов сигналов в пределах интервалов, равных длительности τзи зондирующего импульса, подвергают полученные в результате суммирования сигналы амплитудному взвешиванию, осуществляют фильтровую обработку сигналов по алгоритму быстрого преобразования Фурье (БПФ), вычисляют модуль  ,
,  (J - количество сигналов доплеровских частот на выходе фильтров БПФ) комплексной огибающей сигналов доплеровских частот на выходе фильтров БПФ, отличающийся тем, что выбирают сигнал с наибольшим значением модуля комплексной огибающей Ukjmax и определяют соответствующий ему k-й строб дальности и сигнал доплеровской частоты jmax, для всех сигналов доплеровских частот выбранного k-го строба дальности определяют коэффициенты ослабления
(J - количество сигналов доплеровских частот на выходе фильтров БПФ) комплексной огибающей сигналов доплеровских частот на выходе фильтров БПФ, отличающийся тем, что выбирают сигнал с наибольшим значением модуля комплексной огибающей Ukjmax и определяют соответствующий ему k-й строб дальности и сигнал доплеровской частоты jmax, для всех сигналов доплеровских частот выбранного k-го строба дальности определяют коэффициенты ослабления  комплексных амплитуд сигналов по частотам, равные отношению комплексных амплитуд сигналов j-х частот
комплексных амплитуд сигналов по частотам, равные отношению комплексных амплитуд сигналов j-х частот  к максимальной комплексной амплитуде сигнала частоты jmax
к максимальной комплексной амплитуде сигнала частоты jmax 

в смежном с k-м стробе дальности при помощи вычисленных коэффициентов  формируют разность амплитуд сигналов Δj, вида
формируют разность амплитуд сигналов Δj, вида

между комплексными амплитудами сигналов доплеровских частот и произведения максимальной комплексной амплитуды сигнала частоты jmax на соответствующие коэффициенты ослабления , сравнивают полученную разность амплитуд сигналов Δj с пороговым значением амплитуды η, которое устанавливают исходя из требуемого значения вероятности ложного обнаружения групповой цели, при превышении порогового значения η хотя бы одним значением разности амплитуд сигналов Δj принимают решение об обнаружении групповой цели.
| US 4536764 А, 20.08.1985 | |||
| RU 2066462 С1, 10.09.1996 | |||
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ КОРРЕКЦИИ КВАДРАТУРНЫХ ДЕМОДУЛЯТОРОВ | 2000 |
|
RU2187140C2 |
| US 5402131 А, 28.03.1995 | |||
| US 2004113835 A1, 17.06.2004 | |||
| Механизм шарнирно-рычажного антипараллелограмма | 1988 |
|
SU1610150A1 |

