Изобретение относится к радиолокации и может быть использовано в бортовых, наземных и корабельных импульсно-доплеровских радиолокационных станциях (РЛС) для селекции цели по скорости на фоне уводящей по скорости помехи.
Известен способ селекции цели импульсно-доплеровской РЛС на фоне уводящей по скорости помехи с помощью использования сторожевых стробов [Защита радиолокационных систем от помех. Состояние и тенденции развития / Под ред. А.И.Канащенкова и В.И.Меркулова. М.: Радиотехника. 2003. с.117]. Сущность способа заключается в том, что формируются два сторожевых строба по скорости, низкочастотный и высокочастотный, сигналы которых поступают на логическую схему вместе с сигналом цели. Если появляется помеха, значительно превышающая по интенсивности сигнал цели, то срабатывает автоматическая регулировка усиления РЛС, в результате чего уровень сигнала цели существенно падает, а помеховый сигнал выделяется одним из сторожевых стробов, высокочастотным или низкочастотным. Появление сигнала в одном из сторожевых стробов позволяет обнаружить факт воздействия на импульсно-доплеровскую РЛС помехи и обеспечить селекцию сигнала цели на фоне уводящей по скорости помехи.
Недостатком способа является то, что в сторожевые стробы могут попасть сигналы доплеровских частот от близкорасположенных целей, а также сигналы, обусловленные турбовинтовым эффектом (эхосигналы от винтов, лопаток турбин и т.д.). Это приведет к тому, что будет невозможно осуществить селекцию сигнала цели на фоне уводящей по скорости помехи.
Известен способ селекции цели импульсно-доплеровской РЛС на фоне уводящей по скорости помехи с использованием быстрого преобразования Фурье (БПФ) [Защита радиолокационных систем от помех. Состояние и тенденции развития / Под ред. А.И.Канащенкова и В.И.Меркулова. М.: Радиотехника. 2003. с.120]. Решение задачи основывается на том, что сигнал цели и уводящая по скорости помеха создают в диапазоне доплеровских частот импульсно-доплеровской РЛС дополнительные сигналы. Для цели это сигналы доплеровских частот, обусловленные турбовинтовым эффектом (эхосигналы от винтов, лопаток турбин и т.д.). Для уводящей по скорости помехи это свои собственные составляющие доплеровских частот. Важно то, что их спектр типичен, уникален и существенно отличается от спектра сигналов доплеровских частот цели. Поэтому после сравнительного анализа спектров сигналов цели и уводящей по скорости помехи, выполняемого с использованием БПФ, можно обнаружить помеху.
Недостаток способа состоит в том, что при наличии нескольких близкорасположенных целей и их взаимных перемещениях доплеровские частоты сигналов совпадают с доплеровскими частотами уводящей по скорости помехи. Это не позволяет селектировать сигнал цели на фоне уводящей по скорости помехи.
Известен способ селекции цели импульсно-доплеровской РЛС на фоне уводящей по скорости помехи путем передачи двух сигналов одновременно на разных частотах (мерцания частоты сигнала) [Защита радиолокационных систем от помех. Состояние и тенденции развития/Под ред. А.И.Канащенкова и В.И.Меркулова. М.: Радиотехника. 2003. с.120, 121]. Сущность способа заключается в том, что сравниваются принятые сигналы доплеровских частот для обеих несущих частот. В отсутствие уводящей по скорости помехи амплитуды сигналов доплеровских частот для обеих несущих частот одинаковы. При действии уводящей по скорости помехи амплитуды откликов на обеих несущих частотах оказываются различными.
Недостатками способа являются необходимость излучения зондирующего сигнала на нескольких частотах, усложнение алгоритмов обработки отраженных сигналов, а также увеличение времени для селекции сигнала цели на фоне уводящей по скорости помехи, что может оказаться нереализуемым.
Наиболее близким техническим решением является способ обнаружения групповой цели [патент РФ №2293349, приоритет от 18.05.05 г. МПК G01S 13/04, 13/56]. В состав групповой цели, как правило, входят несколько одиночных, близкорасположенных целей. С учетом взаимного перемещения этих целей отраженные от них сигналы, имеющие трудноразличимые доплеровские частоты, можно рассматривать в качестве уводящих по скорости помех. В основе способа-прототипа используются амплитудно-фазовые различия сигналов, отраженных от цели, и уводящей по скорости помехи на выходах доплеровских фильтров, перекрывающих выбранный диапазон частот. Поэтому, реализуя фильтровую обработку отраженных сигналов по алгоритму БПФ и дополняя ее соответствующими расчетами, выполненными на основе известных соотношений, удается принять достоверное решение о наличии только полезного сигнала, отраженного от цели, или смеси сигнала и помехи. Иными словами, при воздействии на импульсно-доплеровскую РЛС уводящей по скорости помехи способ-прототип позволяет обнаружить в пределах одного доплеровского фильтра смесь полезного сигнала и помехи.
Однако недостатком способа-прототипа является то, что с его помощью не удается отселектировать сигнал по доплеровской частоте на фоне уводящей по скорости помехи и обеспечить тем самым эффективную помехозащиту импульсно-доплеровской РЛС.
Таким образом, изобретение решает задачу: осуществить селекцию по доплеровской частоте сигнала цели на фоне мощной уводящей по скорости помехи. Достигаемым техническим результатом является нейтрализация воздействия на РЛС мощной уводящей по скорости помехи и выделение на ее фоне полезного сигнала, отраженного от цели.
Суть изобретения состоит в следующем. Известно [Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием. 2003. С.183-185], что создание уводящей по скорости помехи осуществляется за счет приема, усиления и ретрансляции сигнала подавляемой импульсно-доплеровской РЛС. Следовательно, в начальный момент постановки уводящих по скорости помех разница доплеровских частот помехи и сигнала, отраженного от цели, не превышает ширину доплеровского фильтра. Считаем также, что сигнал и помеха не разрешаются и по другим координатам - углам и дальности. Тогда можно утверждать, что в полосе пропускания одного доплеровского фильтра приемника РЛС действует смесь полезного сигнала и помехи. Принципиально важно отметить, что в начальный момент увода амплитуда помехового сигнала должна значительно превышать амплитуду полезного сигнала.
Алгоритм реализации технического результата состоит из двух этапов, а именно сначала устанавливается факт начала постановки уводящей по скорости помехи, а затем обеспечивается селекция полезного сигнала по доплеровской частоте на фоне помехи данного вида.
На первом этапе осуществляют совместную корреляционно-фильтровую обработку принятой антенной смеси сигнала и помехи в стробах дальности и доплеровских фильтрах. Выделяют квадратурные составляющие комплексной огибающей принятой смеси сигнала и помехи, в каждой квадратурной составляющей осуществляют преобразование амплитуд в цифровую форму, в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, подвергают полученные в результате суммирования N отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму N-точечного БПФ, для всех N доплеровских фильтров смесь сигнала и помехи в j-м фильтре домножают на величину  , где i - мнимая единица, N - количество фильтров БПФ, j - номер доплеровского фильтра
, где i - мнимая единица, N - количество фильтров БПФ, j - номер доплеровского фильтра  , вычисляют модули комплексных огибающих смеси сигналов и помехи на выходах доплеровских фильтров, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров как частоту фильтра jmax1 с максимальной амплитудой смеси сигнала и помехи, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, для всех фильтров подмножества R1 вычисляют коэффициент bj, равный отношению амплитуды смеси сигнала и помехи j-го фильтра
, вычисляют модули комплексных огибающих смеси сигналов и помехи на выходах доплеровских фильтров, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров как частоту фильтра jmax1 с максимальной амплитудой смеси сигнала и помехи, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, для всех фильтров подмножества R1 вычисляют коэффициент bj, равный отношению амплитуды смеси сигнала и помехи j-го фильтра  к найденной максимальной амплитуде смеси сигнала и помехи в фильтре jmax1
к найденной максимальной амплитуде смеси сигнала и помехи в фильтре jmax1  :
:
вычисляют величины  ,
,  , равные разностям модулей соответствующих квадратурных составляющих смеси сигнала и помехи j-го фильтра и произведений найденных коэффициентов bj на модули соответствующих квадратурных составляющих смеси сигнала и помехи фильтра с максимальной амплитудой:
, равные разностям модулей соответствующих квадратурных составляющих смеси сигнала и помехи j-го фильтра и произведений найденных коэффициентов bj на модули соответствующих квадратурных составляющих смеси сигнала и помехи фильтра с максимальной амплитудой:


рассчитывают показатель  как
как

сравнивают полученный показатель  с порогом обнаружения η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения смеси полезного сигнала и помехи, при превышении порога, хотя бы в одном фильтре, принимают решение об обнаружении смеси полезного сигнала и помехи. Учитывая, что в начальный момент увода отношение помеха/сигнал много больше единицы, превышение порога указывает на факт наличия мощной уводящей по скорости помехи.
с порогом обнаружения η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения смеси полезного сигнала и помехи, при превышении порога, хотя бы в одном фильтре, принимают решение об обнаружении смеси полезного сигнала и помехи. Учитывая, что в начальный момент увода отношение помеха/сигнал много больше единицы, превышение порога указывает на факт наличия мощной уводящей по скорости помехи.
На втором этапе для селекции полезного сигнала на фоне мощной помехи определяют номера доплеровских фильтров, в которых значение показателя  превысило порог обнаружения η, осуществляют запоминание значений показателя
превысило порог обнаружения η, осуществляют запоминание значений показателя  соответствующих выбранным номерам фильтров, среди запомненных значений показателя
соответствующих выбранным номерам фильтров, среди запомненных значений показателя  выбирают показатель, имеющий максимальную величину
выбирают показатель, имеющий максимальную величину  и определяют доплеровскую частоту сигнала цели как частоту фильтра, имеющего максимальную величину показателя
и определяют доплеровскую частоту сигнала цели как частоту фильтра, имеющего максимальную величину показателя  .
.
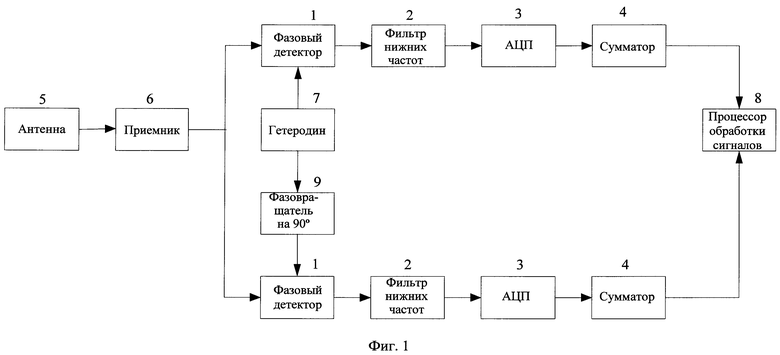
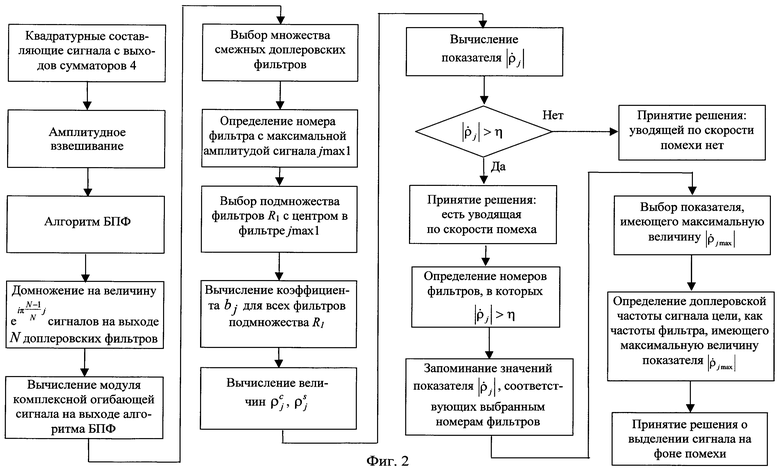
Изобретение поясняется чертежами. На фиг.1 изображена структурная схема устройства, реализующего предлагаемый способ селекции цели на фоне уводящей по скорости помехи. На фиг.2 представлена схема, поясняющая последовательность преобразования сигнала в процессоре обработки сигналов 8. На фиг.3-6 приведены диаграммы экспериментальных данных, доказывающие работоспособность способа. Устройство содержит фазовые детекторы 1, фильтры нижних частот 2, аналого-цифровые преобразователи 3, сумматоры 4, антенну 5, приемник 6, гетеродин 7, процессор обработки сигналов 8, фазовращатель на 90° 9.
В случае, когда на входе приемника РЛС действует только полезный сигнал, а уводящая по скорости помеха отсутствует, коэффициенты bj, вычисленные согласно (1), равны отношениям модулей частотных характеристик j-х фильтров к модулю характеристики фильтра jmaxl на доплеровской частоте цели:

где  - комплексная амплитуда полезного сигнала;
- комплексная амплитуда полезного сигнала;
 - значение комплексной частотной характеристики доплеровского фильтра с номером j на частоте f;
- значение комплексной частотной характеристики доплеровского фильтра с номером j на частоте f;
 - значение комплексной частотной характеристики доплеровского фильтра с номером jmax1 на частоте f;
- значение комплексной частотной характеристики доплеровского фильтра с номером jmax1 на частоте f;
f - доплеровская частота сигнала цели.
Известно, что характеристики доплеровских фильтров, полученных при помощи БПФ, являются комплексными. Фазовое смещение для j-го фильтра равно  . Для устранения этого смещения и получения вещественных характеристик доплеровских фильтров выходные отсчеты смеси сигналов и помехи после алгоритма БПФ необходимо домножать на величины
. Для устранения этого смещения и получения вещественных характеристик доплеровских фильтров выходные отсчеты смеси сигналов и помехи после алгоритма БПФ необходимо домножать на величины  . В результате частотные характеристики фильтров БПФ становятся вещественными:
. В результате частотные характеристики фильтров БПФ становятся вещественными:  и
и  . С учетом выполненного умножения квадратурные составляющие смеси сигналов помехи на выходах доплеровских фильтров j и jmax1 описываются следующими выражениями:
. С учетом выполненного умножения квадратурные составляющие смеси сигналов помехи на выходах доплеровских фильтров j и jmax1 описываются следующими выражениями:




Подстановка (5)-(9) в (2) и (3) позволяет получить


Как следует из (4), (10), (11), значение  в отсутствие уводящей по скорости помехи равно нулю. Важно, что при действии уводящей по скорости помехи значение коэффициента bj зависит не только от доплеровских частот смеси полезных сигналов и помехи f1, f2, но и от их комплексных амплитуд
в отсутствие уводящей по скорости помехи равно нулю. Важно, что при действии уводящей по скорости помехи значение коэффициента bj зависит не только от доплеровских частот смеси полезных сигналов и помехи f1, f2, но и от их комплексных амплитуд  ,
,  :
:

Соответственно значения величин ρc j и ρs j в общем случае отличны от нуля:


Таким образом, величина  является показателем для принятия решения об обнаружении факта постановки уводящей по скорости помехи. Для принятия решения при наличии внутреннего шума приемника необходимо величину
является показателем для принятия решения об обнаружении факта постановки уводящей по скорости помехи. Для принятия решения при наличии внутреннего шума приемника необходимо величину  сравнивать с порогом η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения уводящей по скорости помехи, например, в соответствии с выражением
сравнивать с порогом η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения уводящей по скорости помехи, например, в соответствии с выражением

где µ - постоянный коэффициент;
µ0 - уровень порога обнаружения смеси полезного сигнала и помехи.
Селекция сигнала, отраженного от цели, по доплеровской частоте основана на допущении о том, что в начале цикла увода амплитуда помехового сигнала существенно больше амплитуды полезного сигнала. Тогда за частоту помехи целесообразно принять частоту доплеровского фильтра, в котором амплитуда смеси сигнала и помехи максимальна. Для селекции полезного сигнала по доплеровской частоте на фоне мощной уводящей по скорости помехи проводят компенсацию помехового сигнала по всем частотным фильтрам согласно (2), (3) и рассчитывают показатель  в соответствии с (4).
в соответствии с (4).
Таким образом, после компенсации помехового сигнала величина показателя  служит признаком для определения доплеровской частоты сигнала цели. Доплеровская частота сигнала цели определяется номером фильтра, в котором получено максимальное значение показателя
служит признаком для определения доплеровской частоты сигнала цели. Доплеровская частота сигнала цели определяется номером фильтра, в котором получено максимальное значение показателя  Поэтому для селекции полезного сигнала по доплеровской частоте на фоне мощной уводящей по скорости помехи необходимо после ее обнаружения определить номера доплеровских фильтров, в которых значение показателя
Поэтому для селекции полезного сигнала по доплеровской частоте на фоне мощной уводящей по скорости помехи необходимо после ее обнаружения определить номера доплеровских фильтров, в которых значение показателя  превысило порог обнаружения η, осуществить запоминание значений показателя
превысило порог обнаружения η, осуществить запоминание значений показателя  , соответствующих выбранным номерам фильтров, среди запомненных значений показателя
, соответствующих выбранным номерам фильтров, среди запомненных значений показателя  выбрать показатель, имеющий максимальную величину
выбрать показатель, имеющий максимальную величину  и определить доплеровскую частоту сигнала цели как частоту фильтра, имеющего максимальную величину показателя
и определить доплеровскую частоту сигнала цели как частоту фильтра, имеющего максимальную величину показателя  .
.
Осуществить предлагаемый способ обработки возможно в импульсно-доплеровской РЛС. Один из возможных вариантов структурной схемы устройства, реализующего предлагаемый способ селекции цели, представлен на фиг.1. Принятый антенной 5 сигнал поступает на вход приемника 6. Для обеспечения когерентной обработки сигнал с выхода приемника 6 с помощью двух фазовых детекторов 1, гетеродина 7, фазовращателя на 90° 9 и двух фильтров нижних частот 2 разделяется на квадратурные составляющие. В аналого-цифровых преобразователях 3 производится формирование последовательности цифровых отсчетов квадратурных составляющих сигнала. Далее в сумматорах 4 осуществляется суммирование цифровых отсчетов квадратурных составляющих сигнала. Суммирование производится в пределах интервала, равного длительности зондирующего импульса.
Вся дальнейшая обработка сигнала происходит в процессоре обработки сигналов 8. На фиг.2 представлена схема, поясняющая последовательность преобразования сигнала в процессоре обработки сигналов 8. Полученные в результате суммирования отсчеты подвергают амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму БПФ и для всех N доплеровских фильтров отсчеты смеси сигнала и помехи в j-м фильтре домножают на величину  . Затем вычисляют модуль комплексных огибающих смеси сигналов и помехи на выходах доплеровских фильтров. Далее выбирают множество смежных доплеровских фильтров. Из выбранного множества смежных доплеровских фильтров определяют доплеровскую частоту f1 как частоту фильтра jmax1 с максимальной амплитудой смеси сигнала и помехи и выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1. Для всех фильтров подмножества R1 вычисляют коэффициент bj согласно соотношению (1). Далее в процессоре обработки сигналов 8 в соответствии с выражениями (2) и (3) вычисляют величины
. Затем вычисляют модуль комплексных огибающих смеси сигналов и помехи на выходах доплеровских фильтров. Далее выбирают множество смежных доплеровских фильтров. Из выбранного множества смежных доплеровских фильтров определяют доплеровскую частоту f1 как частоту фильтра jmax1 с максимальной амплитудой смеси сигнала и помехи и выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1. Для всех фильтров подмножества R1 вычисляют коэффициент bj согласно соотношению (1). Далее в процессоре обработки сигналов 8 в соответствии с выражениями (2) и (3) вычисляют величины  ,
,  и рассчитывают показатель
и рассчитывают показатель  согласно (4). Затем показатель
согласно (4). Затем показатель  сравнивают с порогом η, который вычисляют в процессоре обработки сигналов 8 по формуле (15). При превышении порога, хотя бы в одном фильтре, принимают решение об обнаружении уводящей по скорости помехи. После обнаружения этой помехи в процессоре обработки сигналов 8 определяют номера доплеровских фильтров, в которых значение показателя
сравнивают с порогом η, который вычисляют в процессоре обработки сигналов 8 по формуле (15). При превышении порога, хотя бы в одном фильтре, принимают решение об обнаружении уводящей по скорости помехи. После обнаружения этой помехи в процессоре обработки сигналов 8 определяют номера доплеровских фильтров, в которых значение показателя  превысило порог обнаружения η. Для тех номеров доплеровских фильтров, в которых значение показателя
превысило порог обнаружения η. Для тех номеров доплеровских фильтров, в которых значение показателя  превысило порог обнаружения η, осуществляют запоминание значений показателя
превысило порог обнаружения η, осуществляют запоминание значений показателя  . Далее среди запомненных значений показателя
. Далее среди запомненных значений показателя  выбирают тот, который имеет максимальную величину
выбирают тот, который имеет максимальную величину  и определяют доплеровскую частоту сигнала цели как частоту доплеровского фильтра, имеющего максимальную величину показателя
и определяют доплеровскую частоту сигнала цели как частоту доплеровского фильтра, имеющего максимальную величину показателя  .
.
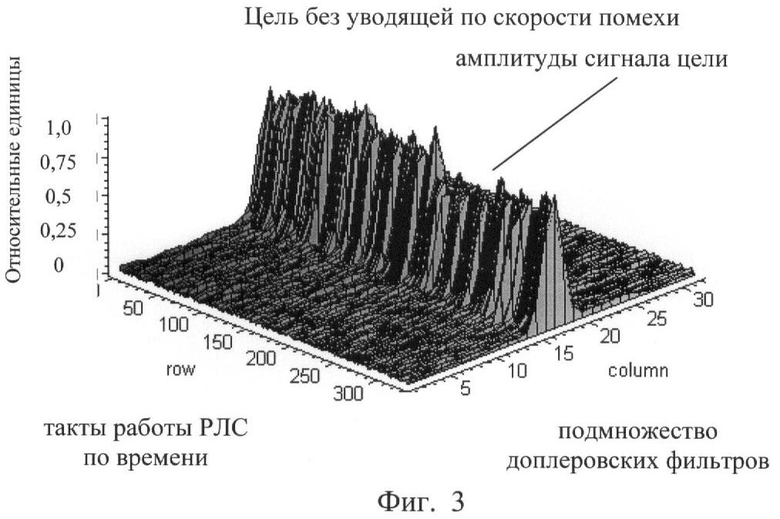
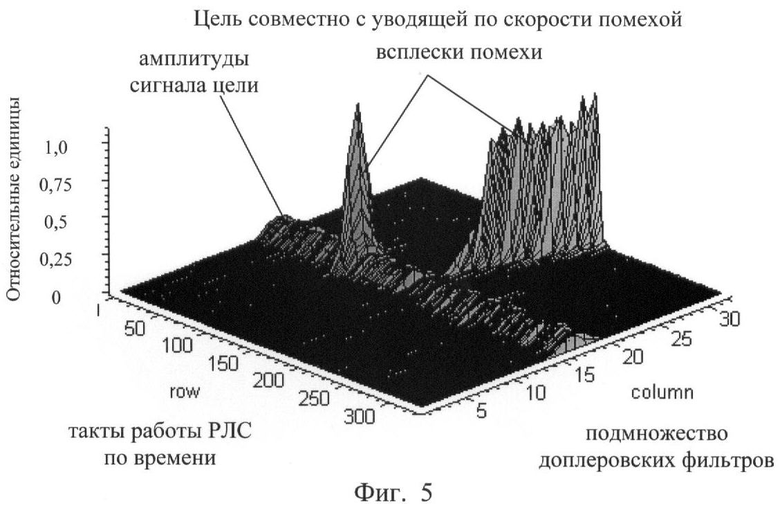
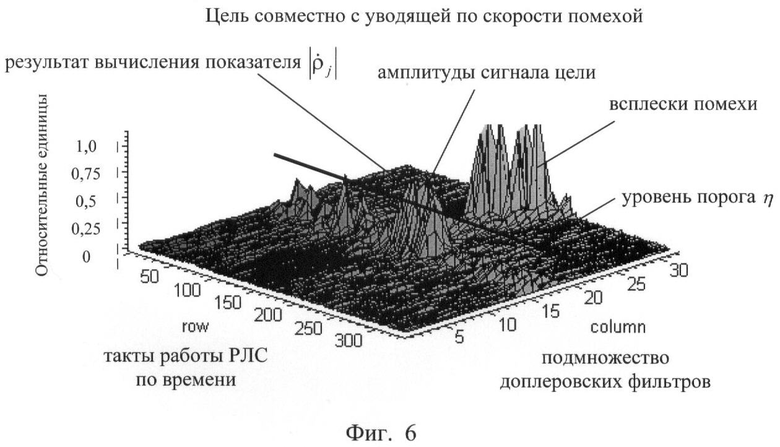
Подтверждение возможности получения вышеуказанного технического результата при осуществлении предлагаемого способа проводилось по экспериментальным данным (фиг.3-6). На фиг.3 и 4 показано исходное распределение амплитуд полезных сигналов по доплеровским фильтрам в k-м стробе дальности в отсутствие уводящей по скорости помехи, а на фиг.5 и 6 изображены распределения амплитуд полезных сигналов и уводящей по скорости помехи по доплеровским фильтрам в том же стробе дальности.
При помощи предлагаемого способа были обработаны записи реальных сигналов РЛС, каждая из которых состояла из 328 тактов работы РЛС по времени. В каждом такте были записаны квадратурные составляющие сигналов 32 частотных фильтров строба дальности, в котором обнаруживался сигнал. По осям ординат откладывались относительные значения амплитуд полезных и помеховых сигналов.
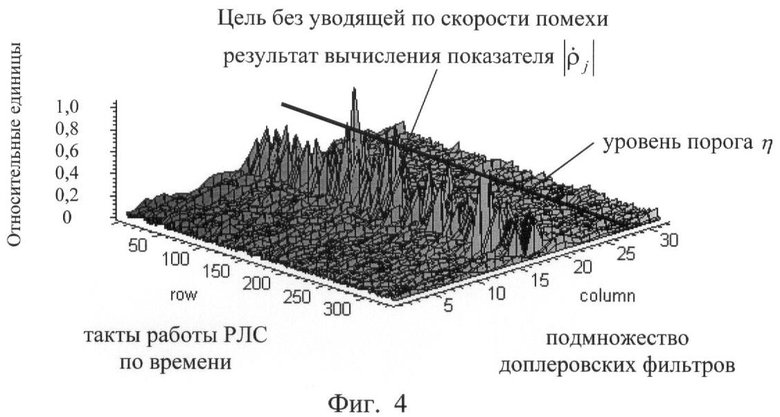
На фиг.4 показан результат вычисления показателя  для подмножества сигналов доплеровских частот цели, представленного на фиг.3. Показатель
для подмножества сигналов доплеровских частот цели, представленного на фиг.3. Показатель  вычислялся по формулам (1-4). Из чертежа видно, что значения показателя
вычислялся по формулам (1-4). Из чертежа видно, что значения показателя  ниже порогового значения η. Поэтому в соответствии с предлагаемым способом здесь принимается решение об отсутствии уводящей по скорости помехи, что соответствует действительности.
ниже порогового значения η. Поэтому в соответствии с предлагаемым способом здесь принимается решение об отсутствии уводящей по скорости помехи, что соответствует действительности.
Из фиг.5 и 6 видно, что в начале цикла увода, т.е. на 75-100 тактах по времени доплеровские частоты, помехи и сигнала цели примерно равны, а к концу цикла увода, т.е. примерно к 150-160 такту, эти частоты существенно различаются. Кроме того, амплитуда помехового сигнала существенно больше амплитуды полезного сигнала.
На фиг.6 показан результат вычисления показателя  для подмножества сигналов доплеровских частот цели и уводящей по скорости помехи, показанного на фиг.5. Из чертежа видно, что значения показателя
для подмножества сигналов доплеровских частот цели и уводящей по скорости помехи, показанного на фиг.5. Из чертежа видно, что значения показателя  выше порогового значения η. Поэтому в соответствии с предлагаемым способом здесь принимается решение о применении уводящей по скорости помехи.
выше порогового значения η. Поэтому в соответствии с предлагаемым способом здесь принимается решение о применении уводящей по скорости помехи.
Из фиг.6 видно, что для доплеровских фильтров с номерами №№16-20 значение показателя  превысило порог обнаружения η, поэтому в соответствии с предлагаемым способом для них осуществляют запоминание значений показателя
превысило порог обнаружения η, поэтому в соответствии с предлагаемым способом для них осуществляют запоминание значений показателя  . Среди запомненных значений показателя
. Среди запомненных значений показателя  выбирают тот, который имеет максимальную величину
выбирают тот, который имеет максимальную величину  . В данном случае это доплеровский фильтр №17. Следовательно, доплеровская частота сигнала цели соответствует доплеровскому фильтру под №17, в чем легко убедиться путем сравнения фиг.5 и 6.
. В данном случае это доплеровский фильтр №17. Следовательно, доплеровская частота сигнала цели соответствует доплеровскому фильтру под №17, в чем легко убедиться путем сравнения фиг.5 и 6.
Использование изобретения в бортовых, наземных и корабельных РЛС не потребует изменения их принципов построения, режимов работы, существенных вычислительных затрат и позволит осуществлять селекцию по доплеровской частоте сигнала цели на фоне мошной уводящей по скорости помехи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2298806C9 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2293349C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2009 |
|
RU2407034C9 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2008 |
|
RU2379704C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2006 |
|
RU2316788C9 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ПО СКОРОСТИ С ЗАЩИТОЙ ОТ УВОДЯЩЕЙ ПОМЕХИ | 2003 |
|
RU2234106C1 |
Изобретение может быть использовано в бортовых, наземных и корабельных импульсно-доплеровских радиолокационных станцях (РЛС) для селекции цели по скорости на фоне уводящей по скорости помехи. Достигаемым техническим результатом является нейтрализация воздействия на РЛС мощной уводящей по скорости помехи и выделение на ее фоне полезного сигнала, отраженного от цели. Заявленный способ реализуется в два этапа. На первом этапе устанавливается факт начала постановки уводящей по скорости помехи. Для этого осуществляют совместную корреляционно-фильтровую обработку принятой антенной смеси сигнала и помехи в стробах дальности и доплеровских фильтрах. Из комплексных амплитуд на выходах анализируемых фильтров по определенным правилам формируют специальный показатель сигнально-помеховой обстановки. При превышении этим показателем некоторого порогового значения принимается решение о правильном обнаружении уводящей по скорости помехи. На втором этапе анализируются выходные напряжения тех доплеровских фильтров, для которых значение показателя превысило ранее установленный порог, и доплеровская частота полезного сигнала, отраженного от цели, определяется как частота фильтра, имеющего максимальную величину показателя. 6 ил.
Способ селекции цели на фоне уводящей по скорости помехи, заключающийся в том, что выделяют квадратурные составляющие комплексной огибающей принятой антенной смеси сигнала и помехи, в каждой квадратурной составляющей осуществляют преобразование амплитуд в цифровую форму, в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, подвергают полученные в результате суммирования N отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму N-точечного быстрого преобразования Фурье (БПФ), для всех N доплеровских фильтров отсчеты смеси сигнала и помехи в j-м фильтре домножают на величину  , где i - мнимая единица, N - количество фильтров БПФ, j - номер доплеровского фильтра
, где i - мнимая единица, N - количество фильтров БПФ, j - номер доплеровского фильтра  , вычисляют модули комплексных огибающих смеси сигналов и помехи на выходах доплеровских фильтров, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров, как частоту фильтра jmax1 с максимальной амплитудой смеси сигнала и помехи, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, для всех фильтров подмножества R1 вычисляют коэффициент bj, равный отношению амплитуды смеси сигнала и помехи j-го фильтра
, вычисляют модули комплексных огибающих смеси сигналов и помехи на выходах доплеровских фильтров, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров, как частоту фильтра jmax1 с максимальной амплитудой смеси сигнала и помехи, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, для всех фильтров подмножества R1 вычисляют коэффициент bj, равный отношению амплитуды смеси сигнала и помехи j-го фильтра  , к найденной максимальной амплитуде смеси сигнала и помехи в фильтре jmax1
, к найденной максимальной амплитуде смеси сигнала и помехи в фильтре jmax1  :
:
 ,
,
вычисляют величины  ,
,  , равные разностям модулей соответствующих квадратурных составляющих смеси сигнала и помехи j-го фильтра и произведений найденных коэффициентов bj на модули соответствующих квадратурных составляющих смеси сигнала и помехи фильтра с максимальной амплитудой:
, равные разностям модулей соответствующих квадратурных составляющих смеси сигнала и помехи j-го фильтра и произведений найденных коэффициентов bj на модули соответствующих квадратурных составляющих смеси сигнала и помехи фильтра с максимальной амплитудой:
 ,
,

рассчитывают показатель  как
как
сравнивают полученный показатель с порогом обнаружения η, который устанавливают, исходя из требуемого значения вероятности ложного обнаружения уводящей по скорости помехи, при превышении порога хотя бы в одном фильтре принимают решение об обнаружении уводящей по скорости помехи, отличающийся тем, что определяют номера доплеровских фильтров, в которых значение показателя превысило порог обнаружения η, осуществляют запоминание значений показателя соответствующих выбранным номерам фильтров, среди запомненных значении показателя выбирают показатель, имеющий максимальную величину  , определяют доплеровскую частоту сигнала цепи, как частоту фильтра, имеющего максимальную величину показателя
, определяют доплеровскую частоту сигнала цепи, как частоту фильтра, имеющего максимальную величину показателя  .
.
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2293349C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 2004 |
|
RU2264633C2 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В ОДНОЧАСТОТНОМ РАДИОЛОКАТОРЕ С ВОБУЛЯЦИЕЙ ЧАСТОТЫ ПОВТОРЕНИЯ И ЧЕРЕСПЕРИОДНЫМ ВЫЧИТАНИЕМ СИГНАЛОВ НА ПРОМЕЖУТОЧНОЙ ЧАСТОТЕ | 1964 |
|
SU1840641A1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ПО СКОРОСТИ С ЗАЩИТОЙ ОТ УВОДЯЩЕЙ ПОМЕХИ | 2003 |
|
RU2234106C1 |
| US 6765525 B2, 20.07.2004 | |||
| US 2005078029 A1, 14.04.2005 | |||
| Устройство для механической обработки пластмассовых изделий | 1990 |
|
SU1742081A1 |

