Изобретение относится к области управления движением автотранспорта и, в частности, к регулированию движения автотранспорта на перекрестке.
Известны наиболее часто используемые на практике способы регулирования движения автотранспорта на перекрестке [1-3]. При этом переключение сигналов светофора проводится с использованием переключающего реле и таймера с фиксированной установкой времени переключения сигналов светофора. Время переключения может корректироваться по месту расположения светофора или дистанционно.
Однако недостатком этого способа является установка фиксированного времени переключения, что не позволяет в динамике (в темпе с обстановкой трафика) отслеживать складывающуюся ситуацию движения и своевременно реагировать на эту ситуацию, используя длительность времени переключения сигналов светофора. В свою очередь, это создает несимметричные потоки автомашин по сторонам движения, что приводит к неоправданным задержкам движения и возникновению пробок на пути движения автотранспорта.
Известны также способы и устройства более сложного графика для регулирования потоков транспорта на перекрестках.
При этом используются детекторы обнаружения транспортных сред и учитывается длина очереди автомашин перед светофором [1-3]. Предложены также интеллектуальные системы моделирования управления транспортными потоками на перекрестках [4, 5].
Однако недостатком этих способов и устройств является в одном случае отсутствие четких рекомендаций для определения времени переключения светофора, а в другом - сложность предлагаемых средств распределения потоков транспорта, что в итоге не позволяет организовать работу переключающих устройств управления светофора в реальном времени. В случаях [4, 5], например, алгоритмы и программное обеспечение предназначены в основном для моделирующих устройств.
Известен способ и устройство автоматизированным управлением уличным транспортом [2]. При этом учитывается длина участка дороги, занятой автомашинами перед перекрестком. Однако при этом при скоплении машин перед перекрестком не учитывается расстояние между машинами на перекрестке, т.е. число машин на данном участке дороги, и тем самым не учитывается время задержки на перекрестке движения последующей машины после начала движения предыдущей, т.е. реальное время чистого (транспортного) запаздывания, что не позволяет реально оценивать требуемое время переключения сигналов светофора.
Технической задачей настоящего изобретения является обеспечение получения достоверной информации о времени запаздывания при прохождении автотранспорта на длине участка дороги, занятой автотранспортом, для более точной оценки необходимого времени переключения сигналов светофора и тем самым более эффективного управления движения автотранспорта на перекрестке, снижение простоев транспорта, уменьшение расхода горючего и вредных выбросов в атмосферу.
Указанная задача достигается тем, что способ регулирования движения автотранспорта на перекрестке включает регулирование движения с помощью светофора, переключение сигналов светофора с использованием переключающих реле и таймера, определение длины участка дороги, занятой автомашинами от ограничивающей линии перекрестка до конечной границы участка дороги, занятой автомашинами на данном участке дороги, отличается тем, что время переключения сигналов светофора с зеленого света на красный устанавливают с учетом определения среднего расстояния между машинами перед перекрестком, т.е. числа машин на данном участке дороги, и с учетом времени задержки на перекрестке движения последующей автомашины после начала движения предыдущей машины, при этом время переключения сигналов светофора с зеленого света на красный tпep определяется одновременно для встречных полос движения на перекрестке из выражения

где tуст - базовое время установки переключения сигналов светофора для обычного режима движения (без скопления автомашин перед светофором);
Δ - длина участка дороги, занятого автомашинами; W - средняя скорость движения машин на перекрестке; n - число автомашин перед светофором;
τтр - среднее время задержки начала движения последующей машины после начала движения предыдущей, после чего сравнивают время переключения сигналов светофора для противоположных сторон движения автомашин и устанавливают на светофоре наибольшее из этих сравниваемых значений tпep=max tпep.
Способ также отличается тем, что в случае наличия двух или нескольких полос движения перед перекрестком время переключения сигналов светофора выбирают наибольшим из этих для этих сравниваемых значений.
Известно, какие трудности при автоматическом регулировании возникают, если в регулируемом объекте имеется время чистого (транспортного) запаздывания. При этом необходимо иметь точную информацию об этом времени для синтеза системы регулирования и оценки времени регулирования процессами [5].
В данном изобретении для уточнения этого времени чистого запаздывания учитывается в сложной обстановке дорожного трафика (при скоплении автомашин перед перекрестком) не только длина участка дороги Δ, занятая автомашинами, но и среднее расстояние между машинами и число машин перед перекрестком, так как время чистого запаздывания движения данного скопления автомашин перед перекрестком определяется не только скоростью движения машин после установления зеленого сигнала светофора, но и установившимся расстоянием между машинами, а также и временем определенной неизбежной задержки движения (трогания) последующей машины после начала движения впереди стоящей машины (время начала трогания машины) τтр. Среднее расстояние между машинами на длине Δ при этом определится числом машин n, а дополнительное время при задержке движения τзап определится как

В этом случае общее время чистого запаздывания tзап нахождения данной очереди машин перед перекрестком определится как

где Δ - длина дороги, занятая автотранспортом (наибольшая из встречных полос движения); W - средняя скорость движения машин на перекрестке.
В данном изобретении для организации бесперебойной работы регулирования движением на перекрестке предлагается ввести время чистого запаздывания tзап как корректирующее время к определенному (базовому) времени tуст установки переключения сигнала светофора для обычного режима движения, т.е. времени, устанавливаемому без скопления автомашин перед светофором. В этом случае при наличии установки базового времени даже в случае непредвиденного сбоя в определении времени чистого запаздывания tзап регулирование движения не будет полностью блокировано. В данном изобретении величины tуст, W, tзaп являются корректируемыми уставками, так как их значения зависят от конкретной обстановки на данном участке дороги (например, гололед, мокрая дорога, неровное покрытие дороги и т.д.). Величины Δ и n при использовании датчиков (детекторов) наблюдения определяются с использованием методов распознавания образов [7].
В предлагаемом способе требуемое время переключения tпep определяют одновременно для встречных полос движения на перекрестке и сравнивают эти определяемые времена с выбором для переключения сигналов на светофоре наибольшего из них, т.е. с выбором значения

В случае наличия на перекрестке двух или нескольких полос движения выбирают время переключения сигналов светофора по наибольшему значению для этих полос движения.
В случае наличия на светофоре стрелок поворотов движения (вправо, влево) время переключения сигналов светофора определяют дополнительно для данной полосы движения автомашин.
В предлагаемом изобретении время установки переключения сигналов светофора для обычного режима движения, средняя скорость движения машин на перекрестке, среднее время задержки начала движения последующей автомашины после начала движения предыдущей являются корректирующими величинами при определении времени переключения сигналов светофора, оцениваются и устанавливаются операторами в зависимости от условий обстановки движения перед перекрестком.
Таким образом, в случае скопления автомобилей перед перекрестком время переключения увеличивается на реальное время чистого запаздывания, что способствует быстрой эвакуации автомобилей на перегруженной трафиком стороне дороги перед перекрестком, предотвращает дальнейшее скопление автотранспорта и образование дорожных пробок.
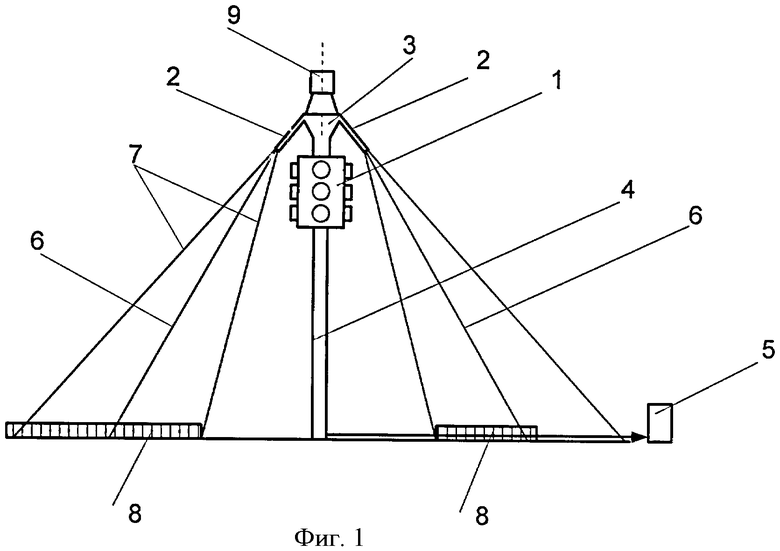
Способ реализуется устройством, представленным на фиг.1 и 2. Оно включает (фиг.1) регулирующий светофор 1, датчик наблюдения за отрезками дороги перед светофорами в перпендикулярных (или требуемых) направлениях 2; блок светофора с датчиками (детекторами) наблюдения 3; линию передачи показаний датчиков наблюдения к обрабатывающему приемнику сигналов 4; пункт управления сигналами светофора 5; центральные оси визирования датчиков наблюдения 6; линии учета результатов визирования датчиков наблюдения 7; участки дороги, занятые автомобилями 8; устройство сканирования датчиков наблюдения 9.
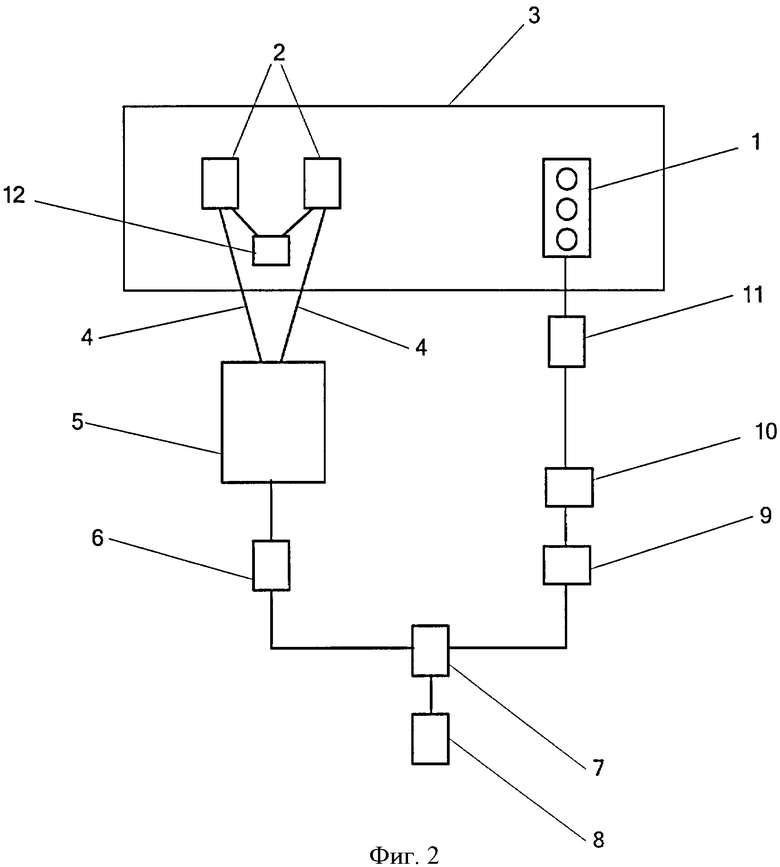
На фиг.2 представлена блок-схема устройства реализации способа. Устройство включает: светофор 1; датчик (детектор) наблюдения 2; блок светофора с датчиками наблюдения 3; линии передачи сигналов от датчиков наблюдения 4 к обрабатывающему приемнику сигналов 5; блок распознавания длины наибольшего участка дороги, занятой автотранспортом по данному направлению, и числа автомашин на данном участке дороги 6; вычислительный блок 7; блок корректировки: базового времени переключения сигналов светофора (при отсутствии скопления автомашин перед перекрестком), средней скорости движения автотранспорта перед перекрестком и времени задержки начала движения последующей автомашины после начала движения предыдущей 8; блок установки расчетного времени переключения сигналов светофора 9; таймер 10; реле переключений 11 и блок сканирования датчиков наблюдения 12.
Устройство работает следующим образом. На светофоре 1 (фиг.1 и 2) с использованием таймера 10 (фиг.2) устанавливается базовое время переключения сигналов светофора tyст (см. формулу (1)), при этом реле 11 (фиг.2) обеспечивает переключение сигналов светофора. Датчики наблюдения 2 (фиг.1 и 2) обеспечивают визирование на участки дороги перед светофором и передачу изображения участка дороги с находящимися на ней автомобилями по линиям передачи 4 в обрабатывающий приемник сигналов 5 (фиг.2). С использованием блока 6 (фиг.2), в котором используется программа распознавания образов, определяется длина участка дороги 8 (фиг.1), занятого автотранспортом от ограничивающей линии перед перекрестком до конечной границы участка дороги, занятой автомашинами Δ, наибольшая для данного направления движения, и число машин на данном участке дороги. В вычислительном блоке 7 (фиг.2) определяется время переключения сигналов светофора от зеленого света к красному по формуле (1) для каждого из противоположных направлений движения, при этом коэффициенты tуст, W, τтр задаются и могут при необходимости корректироваться блоком корректировки 8 (фиг.2). В вычислительном блоке также производится сравнение определяемых времен переключения tпep для противоположных направлений движения на перекрестке с выбором для использования наибольшего значения tпep=max tпep. Вычисленное и выбранное в блоке 7 время переключения сигналов светофора tпер=max tпep (см. формулу (1)) используется в блоке 9 для корректировки задания таймеру 10, который переключает с помощью реле 11 сигналы светофора 1 в соответствии со скорректированным временем переключения. В предлагаемом способе используются в качестве датчиков 3 (фиг.1 и 2) и обрабатывающего приемника сигналов 5 (фиг.2) различные виды их исполнения (по выбору изготовителя): визирные головки телевизионных установок и телевизионный приемник; датчики восприятия инфракрасного излучения и соответствующие приемники; излучатели радиоволн и радиоприемники. В случае потребности изменять центральную ось визирования датчиков 6 и соответствующие линии углов визирования датчиков 7 (фиг.1) используют сканирующее устройство 9 (фиг.1), 12 (фиг.2).
Примеры реализации способа
Пример 1. В блоке 8 (фиг.2) установлено базовое время переключения сигналов светофора tуст=10 с (см. формулу (1)).
С использованием датчиков наблюдения 2, линий передачи 4 и обрабатывающего устройства 5 определено расстояние от ограничивающей линии перед светофором до конечной границы участка дороги, занятой автомашинами на полосе движения одного направления дороги 8 (левая часть фиг.1) Δ=30 м и число машин n=12, а для противоположного направления дороги Δ=20 м и n=10. В блоке 8 (фиг.2) установлены параметры в формуле (1) tуст=10 с, W=20 м/с и τтр=2 с.В блоке 7 (фиг.2) по формуле (1) вычислено требуемое время переключения сигналов светофора с зеленого света на красный для обоих направлений движения

В блоке 7 происходит сравнение этих величин и выбирается наибольшее значение из них tпep.1>tnep.2
tпep.1=max tпep=33,5 с.
С использованием блока установки расчетного времени переключения сигналов светофора 9 (фиг.2) время переключения сигналов светофора на этот полупериод переключения установлено в таймере 10 tпер=33,5 с, которое и реализуется с помощью реле 11 (фиг.2). После переключения сигнала светофора в следующем полупериоде работы светофора последовательность рассмотренных выше действий устройства повторяется, но уже для полосы дороги, перпендикулярной полосе, рассмотренной в предыдущем полупериоде переключения.
Из этого примера следует, что длительность скорректированного времени переключения светофора зависит в значительной степени от времени задержки трогания машин после начала движения предыдущей машины, что и предусматривается в данном способе.
Пример 2. Базовое время переключения то же, что и в примере 1 tуст=10 с, а также те же значения Δ=30 м и n=12 и Δ=20 м и n=10 м. Из-за наличия гололеда и тумана скорость движения автотранспорта на перекрестке снижена до 10 м/с, а время задержки τтр увеличено до 2,5 с.
В этом случае


В этом случае время переключения сигналов светофора увеличивается по сравнению с примером 1 и равняется
tпер=max tпер=40,5 с.
Пример 3. Базовое время переключений то же, что и в примере 1 tуст=10 с. С использованием датчика наблюдения 2, линий передачи 4 и обрабатывающего устройства (фиг.1, 2) не установлено наличие транспорта на участках дороги от ограничивающей линии перед перекрестком по двум противоположным направлениям движения. В этом случае Δ=0 и по формуле (1) определено в блоке 7 (фиг.2) время переключения tпер, равное базовому времени переключения
tпер.1=tпер.2=tпер=tуст·0,3·0=10 с.
Применение данного способа и устройства обеспечивает ускоренную эвакуацию транспорта с полосы дороги, наиболее перегруженной автотранспортом, что предотвращает образование больших скоплений автотранспорта и образование неоправданных транспортных пробок. Тем самым снижается расход горючего автомашин и эмиссия вредных выбросов на участках дорог перед перекрестками.
БИБЛИОГРАФИЧЕСКИЕ ИСТОЧНИКИ
1. Печерский М.П., Хорович Б.Г. Автоматизированные системы управления дорожным движением в городах. - М.: Транспорт, 1979. - 176.
2. Артыков А.П. Автоматизация управления уличным пассажирским транспортом в больших городах за рубежом. - М.: ГОСИНГИ, 1975. - 39 с.
3. Рушевский П.В. Организация и регулирование уличного движения с применением автоматических средств управления. - М.: Высшая школа. 1974. - 238 с.
4. Григорьев Д.А., Шаймарданова С.И., Балыклов Т.С. Свидетельство об официальной регистрации программы для ЭВМ «Нейросетевая система управления потоками транспорта на перекрестках произвольной конфигурации» №2002611009 от 20.06.2002 г. Роспатент, Москва.
5. Юсупова Н.И., Бажин Д.Н. Модели и алгоритмы управления потоком транспорта на основе нечеткой логики // Российская научно-методическая конференция с международным участием «Управление экономикой: методы, модели, технологии». Сб. научных трудов в 3-х частях. Ч.2. Уфа: УГАТУ, 2001. С.19-24.
Изобретение относится к области управления движением автотранспорта и, в частности, к регулированию движения автотранспорта на перекрестке. Способ предусматривает установку времени переключения сигнала светофора по данному направлению движения пропорциональным длине Δ участка дороги, занятого автомашинами от ограничивающей линии перекрестка до конечной границы участка дороги, занятой автотранспортом на этом участке дороги, и количеству n машин на данном участке дороги с учетом скорости движения машин перед перекрестком и времени задержки начала движения последующей машины после начала движения предыдущей. При этом время переключения сигналов светофора определяют из выражения
где tуст - базовое время установки переключения сигналов светофора; W - средняя скорость движения машин перед перекрестком; τтр - среднее время задержки начала движения последующей машины после начала движения предыдущей. При этом выбирают наибольшую величину tпер для противоположных направлений движения на перекрестке, а величины tпер, W и τтр корректируют в зависимости от условий движения транспорта и состояния дороги. Техническим результатом, достигаемым при применении данного способа, является устранение несимметричного скопления автотранспорта перед светофором на перекрестке, ликвидация неоправданных задержек движения и пробок на пути движения автотранспорта на перекрестках. Это обеспечивает снижение простоев транспорта, снижение расхода горючего и вредных выбросов в атмосферу. 1 з.п. ф-лы, 2 ил.
1. Способ регулирования движения автотранспорта на перекрестке, включающий регулирование движения с помощью светофора, переключение сигналов светофора с использованием переключающих реле и таймера, определение длины участка дороги, занятой автомашинами от ограничивающей линии перед перекрестком до конечной границы участка дороги, занятой автомашинами на данном участке дороги, отличающийся тем, что время переключения светофора с зеленого света на красный устанавливают с учетом определения среднего расстояния между машинами перед перекрестком и числа машин на данном участке дороги, а также с учетом времени задержки на перекрестке движения последующей автомашины после начала движения предыдущей машины, при этом время переключения сигналов светофора от зеленого света на красный tпер определяют одновременно для встречных полос движения на перекрестке из выражения
 ,
,
где tуст - базовое время установки переключения сигналов светофора для обычного режима движения без скопления автомашин перед светофором;
Δ - длина участка дороги, занятого автомашинами;
W - средняя скорость движения машин на перекрестке;
n - число автомашин перед перекрестком;
τтр - среднее время задержки начала движения последующей машины после начала движения предыдущей,
после чего сравнивают время переключения сигналов светофора для противоположных сторон движения автотранспорта и устанавливают на светофоре наибольшее из этих сравниваемых значений tпер=max tпер.
2. Способ по п.1, отличающийся тем, что в случае наличия двух или нескольких полос движения перед перекрестком время переключения сигналов светофора выбирают наибольшим из определенных для этих полос.
| Способ координированного управления транспортными потоками | 1986 |
|
SU1324049A1 |
| Способ координированного управления транспортными потоками | 1973 |
|
SU510957A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ АВТОМОБИЛЕЙ | 1990 |
|
RU2022367C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

