1
Изобретение относится к способам управления движением транспорта и может быть использовано для координированного управления транспортьами потоками на магистрали.
Целью изобретения является повышение точности управления способа.
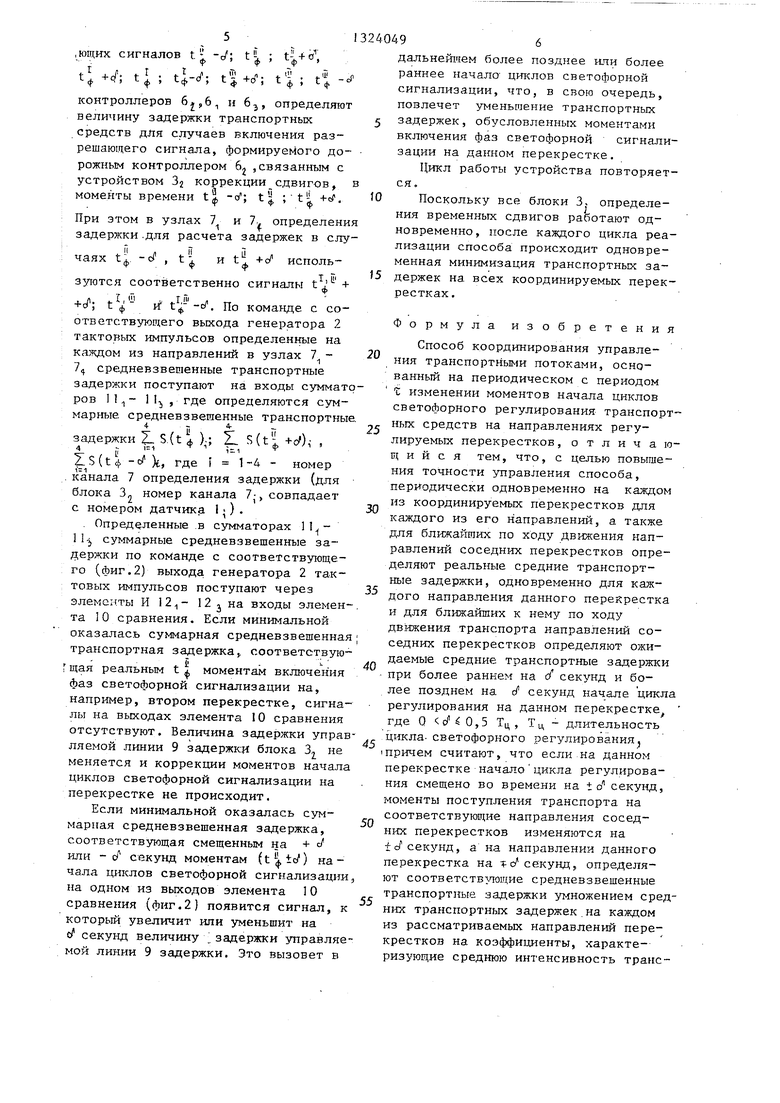
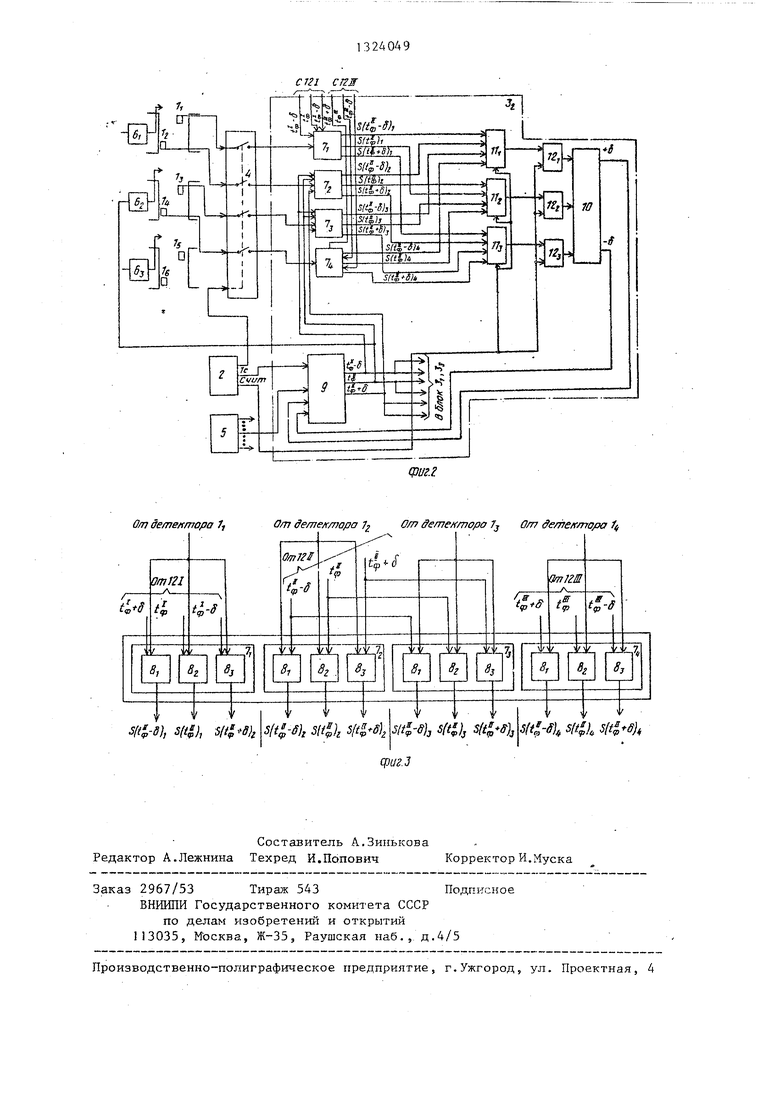
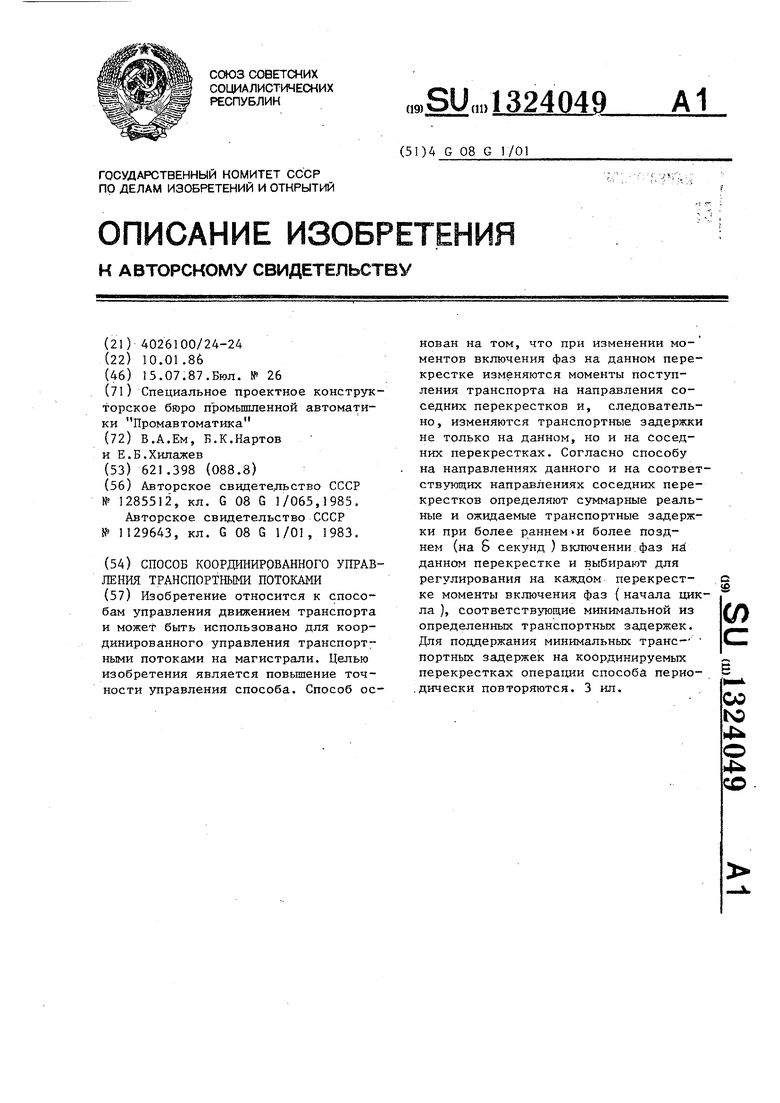
На фиг. приведена функциональная схема устройства, реализующего предлагаемый способ; на фиг.2 - функциональная схема блока временных сдвигов, а также показаны его связи с другими блоками устройства; на фиг.3 - структура узлов определения задержек и подключение их к другим блокам устройства,
В состав устройства, реализующего предлагаемый способ, входят датчики 1 - 1, генератор 2 тактовых импульсов, блоки 34 определения временных сдвигов, блок 4 ключей, блок 5 памяти, контроллеры 6 , узлы 7 определения задержек, каналы 8,, определения задержек, управляемая линия 9 задержки, злемент 10 сравнения, сумматоры 1 li и элементы И 12.
Транспортные задержки на каждом перекрестке магистрали определяются двумя основными факторами: моментами включения фаз (моментом начала цикла) светофорной сигнализации на данном перекрестке и моментами прихода транспортных средств (ТС) на перекрес ток. Если, например, в результате изменения погодных условий изменилась скорость движения, а следовательно, время прохождения ТС одного из перегонов магистрали между координируемыми для компенсации возможных при этом транспортных задержек перекрестками, то соответствукнцим образом должен быть скорректирован временной сдвиг между началами циклов светофорного регулирования этих перекрестков. Корректировка момента начала цикла светофорного регулирования на перекрестке может считаться эффективной в том случае, если она приводит не только к умекъшетт транспортных за,п,ержек на рассматриваемом перекрестке, но и не увеличивает при этом транспортные задержки, равные сумме транспортных задержек на направлениях данного перекрестка и транспортных: задержек . на ближайших к ним по ходу движения ТС направлениях соседних перекрестков т.е. на тех направлениях соседних
0
240492
перекрестков,, моменты поступления ТС на которые зависят от моментов включения фаз светофорного регулирования на данном перекрестке. 5 Поэтому, кроме измерения реальных; транспортных задержек на направлениях данного и соответствующих направлениях соседн1сх перекрестков, определяют ожидаемые транспортные задержки на 0 .тех же направлениях данного и соседних перекрестков для сдвинутых во времени на t 5 секунд моментов включения фаз светофорного регулирования на данном перекрестке, где О - с/ 5 ,5 Тц, (Тц - длительность цикла светофорного регулирования). При этом предполагают, что, во-первых, моменты поступления ТС на ближайшие по ходу движения направления сосед- тгх перекрестков определяются моментом начала цикла (моментами включения фаз ) светофорного регулирования на данном перекрестке. Более ранее, например на с секунд, включение разрешающего сигнала на данном перекрестке приводит к более раннему , на с/ секунд, приходу ТС на соответствующие направления соседних перекрестков. Во-вторых, при определении ожидаемых транспортных задержек -на каждом из рассматриваемых направлений соседних перекрестков с точки зрения ее величины равнозначно используются для определения транспортной задержки смещенные во времени на + в секунд моменты поступления ТС на соотьетствуюидее направление соседнего перекрестка и реальные моменты включения на нем фаз светофорной сигнализации или смещенные на ; (У секунд моменты включения фаз светофорной сигнализации на соседнем перекрестке, а моменты напряжения ТС берутся реальными.
5
0
5
0
После измерения cpeдшix реальных, и средних ожидаемых транспортных задержек на направлениях данного и ближайгиих к ним по ходу движения ТС направлениях соседних перекрестков с учетом средней интенсивности транспортных потоков на каж,цом из рассматриваемых направлений определяют три суммарные средневзвешенные задержки для реальных и смещенных во времени на t секунд моментов начала цикла светофорной сигнализации на данном перекрестке.
Таким образом, определены сущест- вугадие транспортные задержки на направлениях данного перекрестка, а также на связанных с ними направлениях соседних перекрестков. Кроме того, определены аналогичные транспортные задержки, которые будут получены, если изменятся моменты начала циклов регулирования на ± S секунд на данном перекрестке.
Затем для регулирования на данном перекрестке выбирают моменты включения фаз (сдвинутые на i . секунд или несдвинутые ), соответствующие минимальной средневременной суммар- ной транспортной задержке.
Перечисленная последовательность операций выполняется одновременно на каждом из координируемьЕх перекрестков и периодически во времени с пе- риодом f, Причем С 7 Тц.
Датчики 1-, устройства (фиг. реализующего предлагаемъш способ, предназначены для определения момента въезда ТС на направление соответ- ствующего перекрестка.
Генератор 2 тактовых импульсов предназначен для формирования через равные промежутки времени импульсов , управляющих работой блоков 3 определения временных сдвигов и блока 4 ключей.
Каждый из блоков 3 определения временных сдвигов предназначен для
коррекции времени включения фаз светофорных сигналов на соответствующем J-M перекрестке. Например, блок 3 (фиг.2) соответствует второму перекрестку, контролируемому датчиками Ц и Ij. Каждый из узлов 1 s определения задержек, входящий,, например, в блок 3 предназначен для определения Средневзвешенных за - держек транспортных средств в контролируемой зоне, расположенной между датчиком 1 и линией СТОП. Каждый из узлов 7. определения задержек содержит три одинаковых (фиг.З) канала 8j. Первый канал предназначен для определения задержек транспор та S(tp . в зоне датчика 1 - в условиях реального включения запрещающих и разрешающих, сигналов данного (второго ) перекрестка контроллера 6. Второй канал предназначен для опреде- ления задержек для условий, когда начало и конец разрешающего сигнала (начало цикла) предполагается сдвинутым во времени на величину - с/ секунд - S(t -); . Третий канал предназначен для определения задержек для условий, когда и конец разрешающего сигнала предполагается сдвинутым на +1/ секунд - S (t ) , Все каналы работают одновременно.
Таким образом, каждым из узлов 7-7 определяются реальная и ожи- даемые средневзвешенные транспортные задержки в контролируемой зоне датчика ; (для второго перекрестка i 1,2,3.4)..
Управляемая линия 9 задержки, входящая в состав каждого блока 3. определения временных сдвигов (например, блока Зд, ) , предназначена для формирования сигналов, соответствуюп
щих реальным t . и смещенным во времени моментам включения разрешающих сигналов в данном случае на втором перекрестке.
Блок 5 памяти (фиг.2,1) служит дл хранения программы светофорной сигнализации на каждом J-M перекрестке, причем разрешающие сигналы контроллеров 6. могут:быть записаны в нем, например, с помощью нулей, а запрещающие - единиц.
Способ с помощью устройства pea - следующим образом.
С помощью датчиков I фиксируют . транспортные средства,. въезжающие в контролируемзто зону, расположенную между соответствующим датчиком 1. и линией СТОП. По началу очередного периода опроса по сигналу с генератора 2 тактовых импульсов, сн1-о- ающему. запрет на передачу информации, через блок 4 ключей начинают поступать сигналы от датчиков 1 , на входы соответствующих блоков 3 определения временных сдвигов, например на входы блока 3, (фиг.2), контролирующего движение на втором перекрестке. Сигналы, поступающие из блока 2 ключей, подаются в узлы определения задержек блока 3. В каждом узле 7 - 7 определения -задержек (Лиг.З) осутцествляется определение задержек транспортных средств, находящихся в контролируемой зоне данного направления, .за период опро-. са, задаваемого генератором 2. По сигналам с управляемых линий 9 задержки блока 3 и блоков 3, и 3,, соответствуюр;им тек ущим и сдвинутым во времени на состояниям разреша-cf
,ющих сигналов t -J; t- ; t- + e , t W; tj ; t ; t
контроллеров 6p6 н 6, определяют величину задержки транспортных средств для случаев включения разрешающего сигнала, формируемого до- рожным контроллером 6 ,связанным с устройством 3 коррекции сдвигов, в моменты времени t t| I ti этом в узлах 7 и 7 определения задержки .для расчета задержек в случаях t.. - сС
;
и t.+cf исполь- ф
л, Л
зздотся соотйетственно сигналы +
t
Г,ш
rf t/ -c . По команде с соответствующего выхода генератора 2 тактовых импульсов определенные на каждом из направлений в узлах 7 средневзвешенные транспортные задержки поступают на входы сумматоров 1 Ц , где определяются суммарные средневзвешенные транспортные
+ - 4-
задержки Z- SXt ф ); Z. S(t +d ),- ,
4 bl
Z S (t ф - с/ )е, где 1 1-4- номер канала 7 определения задержки (для блока 3„ номер канала 7; совпадает с номером датчика I;)
. Определенные .в сумматорах 1 Ц суммарные средневзвешенные задержки по команде с соответствующего (фиг.2) выхода генератора 2 тактовых импульсов поступают через элементы И 12j на входы элемента 10 сравнения. Если минимальной оказалась суммарная средневзвешенная транспортная задержка соответствуюгщая реальным t моментам включения фаз светофорной сигнализации на, например, втором перекрестке, сигналы на выходах элемента 10 сравнения отсутствуют. Величина задержки управляемой линии 9 задержку блока 3, не меняется и коррекции моментов начала циклов светофорной сигнализации на перекрестке не происходит.
Если минимальной оказалась суммарная средневзвешенная задержка, соответствующая смещенным на + « или - секунд моментам () начала щжлов светофорной сигнализации на одном из выходов элемента 10 сравнения (фиг.2) появится сигнал, к который увеличит или уменьшит на с/ секувд величину задержки управляемой линии 9 задержки. Это вызовет в
5
0
5
0
5
0
5
0
5
дальнейшем более позднее или более раннее начало циклов светофорной сигнализации, что, в свою очередь, повлечет уменьшение транспортных задержек, обусловленных моментами включения фаз светофорной сигнализации на данном перекрестке.
Цикл работы устройства повторяется.
Поскольку все блоки 3, определения временных сдвигов работают одновременно, после каждого цикла реализации способа происходит одновременная минимизация транспортных задержек на всех координируемых перекрестках.
Формула изобретения
Способ координирования управления транспортными потоками, основанный на периодическом с периодом t изменении моментов начала циклов светофорного регулирования транспортных средств на направлениях регулируемых перекрестков, о т л и ч а ю- щ и и с я тем, что, с целью повыще- ния точности управления способа, периодически одновременно на каждом из координируемых перекрестков для каждого из его направлений, а также для ближайших по ходу Движения направлений соседних перекрестков определяют реальные средние транспортные задержки, одновременно для каждого направления данного перекрестка и для ближайших к нему по ходу движения транспорта направлений соседних перекрестков определяют ожидаемые средние транспортные задержки при более раннем на / секунд и более позднем на cf секунд начале цикла регулирования на данном перекрестке где О ,5 Тц, Тд,- длительность цикла- светофорного регулирования Причем считают, что если на данном перекрестке начало цикла регулирования смещено во времени на t с/ секунд, моменты поступления транспорта на соответствующие направления соседних перекрестков из -1еняются на td секунд, а на направлении данного перекрестка на т с/секунд, определяют соответствующие средневзвешенные транспортные задержки умножением средних транспортных задержек.на каждом из рассматриваемых направлений перекрестков на коэффициенты, характеризующие среднюю интенсивность транс71
портного потока на каждом направлении, определяют три суммарные транспортные задержки путем суммирования средневзвешенных транспортных задержек на направлениях данного и соответствующих направлениях соседних перекрестков, соответствующих смещенным во времени на +cf секунд момента начала цикла регулирования на данном перекрестке, и
24049 8
выбирают для управления транспортными потоками в течение времени С 7 T,j на данном перекрестке момент начала цикла светофорного регулирова- НИН, соответствующий минимальной из трех суммарных средневзвешенных транспортных задержек,после окончания времени Т вновь для каждого перекрестка определяют момент нача- W ла цикла светофорного регулирования.
с 7 I СГ2Ж
От детептора /,
От детел люра 1 О/п ffeme fnopa 7j ил7 ffe/ne/nrro/Xf 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕЙРОСЕТЕВОГО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ ПОТОКАМИ В РАЙОНЕ РЕГУЛИРОВАНИЯ | 1997 |
|
RU2134453C1 |
| СИСТЕМА И СПОСОБ РЕГУЛИРОВАНИЯ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2432616C1 |
| Устройство для моделирования дорожного движения | 1988 |
|
SU1518826A2 |
| Способ управления движением транспортных средств на перекрестке | 1987 |
|
SU1462395A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВЕТОФОРНЫМ ОБЪЕКТОМ С ЭВМ С НЕЙРОПРОГРАММАМИ | 1998 |
|
RU2151424C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2454726C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА МНОГОПОЛОСНЫХ ПЕРЕКРЕСТКАХ | 2011 |
|
RU2469410C1 |
| Способ определения скорости транспортного потока | 1988 |
|
SU1587558A1 |
| Устройство для координированного управления движением транспорта | 1983 |
|
SU1129643A1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ ПРИ ПРОЕЗДЕ ПЕРЕКРЕСТКА | 2013 |
|
RU2534131C1 |
| Способ определения транспортных задержек на регулируемом перекрестке и устройство для его осуществления | 1985 |
|
SU1285512A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для координированного управления движением транспорта | 1983 |
|
SU1129643A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
