Изобретение относится к нефтедобывающей промышленности, а именно к технике и технологии бурения скважин, и предназначено для автоматического регулирования зенитного угла искривления скважины и поддержания ее заданных геометрических параметров.
Известно устройство для направленного бурения скважин, включающее исполнительный орган, соединенный с валом, размещенным внутри невращающегося корпуса с закрепленными на нем отклонителями, связанными с силовыми элементами, выполненными в виде эластичных баллонов, в котором силовые элементы расположены внутри отклонителей симметрично их поперечным осям, при этом отклонители снабжены обоймой и клиновидным ножом, между которыми размещены шариковые опоры (см. а.с. СССР №567804, 1977).
Недостатком указанного устройства является то, что ввиду своих конструктивных особенностей оно не обеспечивает оперативного управления направлением бурящейся скважины.
Прототипом является устройство для управления процессом турбинного бурения скважин (см. а.с. СССР №972064, 1982). Недостатком данного устройства является то, что оно не предназначено для регулирования зенитного угла искривления скважины.
Техническая задача - создание точного устройства для автоматического регулирования зенитного угла искривления скважины непосредственно в процессе бурения скважины.
Технический результат - повышение точности и сокращение времени регулирования зенитного угла искривления скважины.
Он достигается тем, что в автоматическое устройство регулирования зенитного угла искривления скважины, снабженное ротором с индивидуальным приводом, устройством съема, приемным устройством, лебедкой и тормозом лебедки, дополнительно введены датчик зенитного угла, датчик глубины, приемник датчика глубины, блок вычисления траектории, запоминающее устройство, блок хранения проектной траектории и геологических параметров, вычислительный блок, пропорциональный блок, интегрирующий блок, сумматор и исполнительный механизм, при этом датчик зенитного угла и датчик глубины скважины соединены с входами блока вычисления траектории, выход которого соединен с входом запоминающего устройства, а выход последнего связан с одним из входов вычислительного блока, выход блока хранения проектной траектории и геологических параметров соединен со вторым входом вычислительного блока, выход которого соединен с входом задатчика, выход задатчика соединен с одним из входов решающего устройства, а выход приемного устройства соединен со вторым входом решающего устройства, при этом выход последнего соединен с входами пропорционального и интегрирующего блоков, выходы которых соединены с входами сумматора, соединенного с исполнительным механизмом, выход которого соединен с тормозом лебедки.
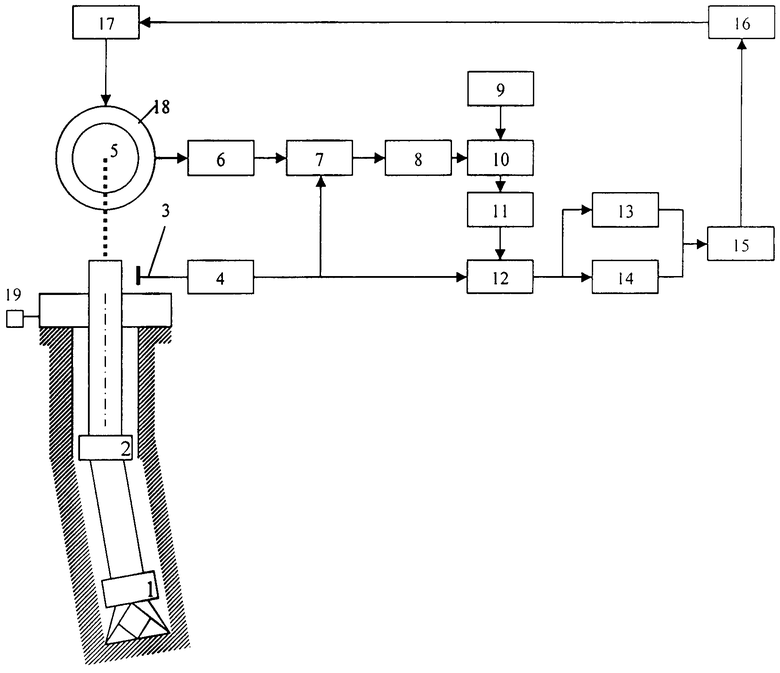
Предлагаемое устройство изображено на чертеже. Устройство содержит датчик зенитного угла 1, канал связи 2, устройство съема 3, приемник 4, датчик глубины 5, приемник датчика глубины 6, блок вычисления траектории 7, запоминающее устройство 8, блок хранения проектной траектории и геологических параметров 9, вычислительный блок 10, задатчик 11, решающее устройство 12, пропорциональный блок 13, интегрирующий блок 14, сумматор 15, исполнительный механизм 16, тормоз лебедки 17, лебедку 18, ротор 19.
При этом выход датчика зенитного угла 1 подключен ко входу канала связи 2, выход канала связи соединен с устройством съема 3, выход которого связан со входом приемника 4, а выход датчика глубины 5 через приемник датчика глубины 6 подключен к одному входу блока вычисления траектории 7, а выход приемника 4 - ко второму входу блока вычисления траектории, при этом выход последнего подключен ко входу запоминающего устройства 8, а выход последнего связан с одним из входов вычислительного блока 10, выход блока хранения проектной траектории и геологических параметров 9 соединен со вторым входом вычислительного блока, выход которого подключен ко входу задатчика 11, выход задатчика соединен с одним из входов решающего устройства 12, а выход приемного устройства соединен со вторым входом решающего устройства, при этом выход последнего соединен с входами пропорционального 13 и интегрирующего 14 блоков, выходы которых подключены к входам сумматора 15, соединенного с исполнительным механизмом 16, выход которого подключен к тормозу 17 лебедки 18, осуществляющей совместно с ротором 19 подачу и привод бурового инструмента.
Блоки 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15 выполнены в виде электронных улов. Исполнительный механизм 16 является электрическим приводом тормоза лебедки.
Устройство работает следующим образом.
Выходной сигнал с датчика 1 зенитного угла искривления скважины подается на вход гидравлического канала связи 2 забоя с устьем скважины. На устье скважины сигнал с выхода канала связи поступает на устройство съема 3, с него на вход приемника 4, где фильтруется от помех и усиливается. Сигнал с датчика глубины 5 поступает на приемник 6, где фильтруется от помех и усиливается. Выделенные и усиленные полезные сигналы, пропорциональные величине зенитного угла и глубине скважины, подаются на блок вычисления траектории 7, в котором определяется текущее положение ствола скважины в пространстве. Полученные данные заносятся в буфер запоминающего устройства 8 и передаются на один из входов вычислительного блока 10. На второй вход передается информация о проектной траектории и свойствах породы из блока хранения 9. Данные о требуемом угле искривления и свойствах пород на текущем участке передаются на вход задатчика 11, который и формирует текущее задание.
По величине полученного сигнала в блоке 12 формируется сигнал рассогласования и подается на входы пропорционального блока 13 и интегрирующего блока 14, где формируются соответственно пропорциональные и интегральные составляющие управляющего воздействия. Сигналы с выходов пропорционального и интегрального блоков передаются на сумматор 15, где и формируется итоговое управляющее воздействие, передающееся затем на вход регулируемого привода 16, связанного с тормозом 17 буровой лебедки 18, в результате чего изменяется осевая нагрузка на забой в соответствии с законом регулирования и величиной зенитного угла. Это устанавливает требуемую величину угла искривления скважины.
Предлагаемое устройство управления процессом бурения позволяет автоматически изменять осевую нагрузку на долото исходя из литологических свойств породы и проектной траектории на данном участке.
Для исключения статической ошибки предлагается использовать пропорционально-интегральный закон регулирования.
В общем случае предлагается использовать программное управление. В управляющий блок закладывается проектная траектория скважины; задание, подаваемое на регулятор, меняется в зависимости от проектной кривизны участка, пробуриваемого в данный момент. Текущее положение скважины в пространстве определяется исходя из показаний датчиков зенитного угла и глубины скважины.
Одним из факторов, вызывающих искривление скважин, является разница в твердости пробуриваемых пластов. Информация о литологическом составе пород, их твердости и углах падения пластов известна заранее как результат геолого-разведочного бурения. Это позволяет автоматически вносить корректировки в задание для уменьшения погрешностей.
Если разбить проектную траекторию скважины на участки, на каждом из которых свойства горных пород и проектный зенитный угол неизменны, то процесс автоматического регулирования можно представить следующим образом:
1. По проектным данным и значению глубины скважины определяется момент перехода с одного участка на другой.
2. Задание на данном участке θз складывается из задания, необходимого для набора данного угла искривления θтp и поправки на литологические свойства породы θпор:θз=θтp+θпор.
3. По показаниям датчика зенитного угла определяется текущий угол искривления скважины θтeк.
4. Вычисляется угол рассогласования ΔθЗ=θз-θтeк.
5. По заданному закону регулирования вычисляется управляющее воздействие η, подаваемое на забой  ,
,
где kп - пропорциональный коэффициент настройки регулятора, kи - интегральный коэффициент настройки регулятора.
Использование предлагаемого устройства позволяет оперативно управлять направлением скважины непосредственно в процессе бурения, повысить скорость и точность проводки скважины, ускорить проходку скважины за счет исключения времени перебуривания ствола скважины при отклонении его от заданного направления и времени, затрачиваемого на спуск и подъем регистрирующих приборов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления процессом турбинного бурения скважин | 1981 |
|
SU972064A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЗАБОЙНОГО ДАВЛЕНИЯ БУРОВОГО РАСТВОРА | 2008 |
|
RU2362011C1 |
| Устройство для контроля положения забоя | 1991 |
|
SU1816856A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЗАБОЯ | 1994 |
|
RU2089854C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНОГО УГЛА ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2020 |
|
RU2752202C1 |
| Устройство для управления процессом бурения скважин | 2019 |
|
RU2728079C1 |
| Устройство для измерения зенитного угла искривления скважины | 2018 |
|
RU2692365C1 |
| Устройство для контроля положения забоя | 1987 |
|
SU1439223A1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ СКВАЖИНЫ В ПРОЦЕССЕ БУРЕНИЯ | 1999 |
|
RU2161701C2 |
| Устройство для измерения зенитного угла искривления скважины | 2016 |
|
RU2649187C2 |
Изобретение относится к нефтедобывающей промышленности, а именно к технике и технологии бурения скважин. Техническим результатом изобретения является повышение точности и сокращение времени регулирования зенитного искривления скважины. Для этого устройство содержит ротор с индивидуальным приводом, устройство съема, приемное устройство и лебедку с тормозом. Дополнительно в устройство введены датчик зенитного угла, датчик глубины, приемник датчика глубины, блок вычисления траектории, запоминающее устройство (ЗУ), блок хранения проектной траектории и геологических параметров, вычислительный блок (ВБ), пропорциональный блок, интегрирующий блок, сумматор и исполнительный механизм. При этом датчик зенитного угла и датчик глубины скважины соединены с входами блока вычисления траектории, выход которого соединен с входом ЗУ, а выход последнего связан с одним из входов ВБ. Выход блока хранения проектной траектории и геологических параметров соединен со вторым входом ВБ, выход которого соединен с входом задатчика. Выход задатчика соединен с одним из входов решающего устройства, ко второму входу которого подключен выход приемного устройства. При этом выход последнего соединен с входами пропорционального и интегрирующего блоков, выходы которых соединены с входами сумматора, соединенного с исполнительным механизмом, выход которого соединен с тормозом лебедки. 1 ил.
Устройство автоматического регулирования зенитного угла искривления скважины, снабженное ротором с индивидуальным приводом, устройством съема, приемным устройством, лебедкой и тормозом лебедки, отличающееся тем, что в него дополнительно введены датчик зенитного угла, датчик глубины, приемник датчика глубины, блок вычисления траектории, запоминающее устройство, блок хранения проектной траектории и геологических параметров, вычислительный блок, пропорциональный блок, интегрирующий блок, сумматор и исполнительный механизм, при этом датчик зенитного угла и датчик глубины скважины соединены с входами блока вычисления траектории, выход которого соединен с входом запоминающего устройства, а выход последнего связан с одним из входов вычислительного блока, выход блока хранения проектной траектории и геологических параметров соединен со вторым входом вычислительного блока, выход которого соединен с входом задатчика, выход задатчика соединен с одним из входов решающего устройства, а выход приемного устройства соединен со вторым входом решающего устройства, при этом выход последнего соединен с входами пропорционального и интегрирующего блоков, выходы которых соединены с входами сумматора, соединенного с исполнительным механизмом, выход которого соединен с тормозом лебедки.
| Устройство для управления процессом турбинного бурения скважин | 1981 |
|
SU972064A1 |
| Устройство для направленного бурения скважин | 1975 |
|
SU567804A1 |
| Система геомагнитного азимутального кругового обзора для ориентации устройств направленного бурения | 1989 |
|
SU1668652A1 |
| Способ определения местоположения забоя скважины | 1989 |
|
SU1698865A1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ТРАЕКТОРИИ СТВОЛА СКВАЖИНЫ | 1997 |
|
RU2110684C1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЗА НАПРАВЛЕНИЕМ ДЕЙСТВИЯ ОТКЛОНИТЕЛЯ, ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263782C2 |
| Устройство для укладки в ящики бисквитов или галет | 1939 |
|
SU67635A1 |
| СПОСОБ ПРОВОДКИ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ НА ОСНОВЕ ГЕОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ | 2006 |
|
RU2313668C1 |
| US 5341886 A, 30.08.1994 | |||
| КАЛИНИН А.А., Искривление буровых скважин | |||
| - М.: Гостоптехиздат, 1963, с.168-170 | |||
| ИСАЧЕНКО В.Х., Инклинометрия скважин | |||
| - М.: Недра, 1987, с.45, 46. | |||

