Изобретение относится к навигации и управлению мобильными объектами железнодорожного транспорта.
В настоящее время навигация всех видов транспорта основана на спутниковых радионавигационных системах (СРНС) типа ГЛОНАСС (Россия), GPS (США) и др. Железнодорожный имеет преимущество перед другими видами транспорта, состоящее в том, что траектория движения его зафиксирована на местности с высокой точностью, что, в свою очередь, позволяет определить эталонную координатную модель пути (ЭКМП) железнодорожной магистрали (RU 2287187, G06T 17/50, 10.11.06) и использовать ее в качестве известной траектории движения и системообразующего элемента спутниковых навигационных систем. Эта возможность пока не использована. Настоящее изобретение собственно и направлено на реализацию такой возможности.
Под ЭКМП понимают координатные функции (модели) расстояния пройденного по оси пути (пикетажа) в трехмерной ортогональной системе координат.
В известном способе определения местоположения мобильного объекта на цифровой электронной карте в системах управления движением поездов типа КЛУБ-У и КЛУБ-УП (Применение спутниковых технологий для решения задач управления железнодорожным транспортом. Информационное издание второй международной научно-практической конференции «Спутниковые технологии на службе железнодорожного транспорта» Москва, 24 июля 2008 г.) применяется координатная модель пути пониженной точности, которая не может использоваться в качестве системообразующего элемента для получения координатного решения.
Наиболее близким по технической сущности является принятый в качестве прототипа способ спутниковой навигации мобильных объектов (Соловьев Ю.А. Системы спутниковой навигации, М.: Эко-Трендз, 2000, с.36), в котором координаты мобильного объекта определяют линейной засечкой от четырех и более спутников и отображают положение мобильного объекта на цифровой навигационной карте.
Известное техническое решение не обеспечивает обратной связи координат мобильного объекта с известной траекторией движения.
Технический результат изобретения заключается в расширении области применения и повышении точности спутниковой навигации за счет определения координат мобильного объекта путем линейной засечки его спутникового приемника, перемещающегося по известной траектории движения (ЭКМП) даже от одного навигационного спутника.
Технический результат достигается тем, что в способе спутниковой навигации мобильных объектов железнодорожного транспорта на основе известной траектории движения согласно изобретению известную траекторию движения - эталонную координатную модель пути представляют в единой с глобальной навигационной спутниковой системой системе ортогональных геоцентрических координат, для чего координаты точек эталонной координатной модели выражают в виде трех функций пикетажа, измеряют дальность, по крайней мере, от одного спутника глобальной навигационной спутниковой системы до мобильного объекта, на основе которой составляют уравнение сферы, и из совместного решения трех функций пикетажа и уравнения сферы определяют координаты и пикетаж мобильного объекта, а скорость и ускорение движения мобильного объекта определяют как первую и вторую производные пикетажа по времени по разностной схеме первого и второго порядка.
Сущность заявляемого изобретения состоит в том, что ЭКМП представляют в единой с СРНС системе ортогональных координат {Oxyz} (фиг.1). Координаты точек ЭКМП выражают в виде функций пикетажа s:
Функции могут принимать различный вид, начиная от уравнения прямой до уравнений сплайнов различной степени, в частности кубических сплайнов. Для апроксимирующих кубических сплайнов, функции f1(s), f2(s), f3(s), для каждого прямолинейного, или криволинейного участка железнодорожного пути (см., например, Журкин И.Г., Нейман Ю.М. Методы вычислений в геодезии Учеб. пособие, М.: Недра, 1988) будут иметь вид:
f1(s)=a0+a1(s-s0)+a2(s-s0)2+a3(s-s0)3;
f2(s)=b0+b1(s-s0)+b2(s-s0)2+b3(s-s0)3;
f3(s)=c0+c1(s-s0)+c2(s-s0)2+c3(s-s0)3,
где ai, bi, ci: ∀i ∈ 0, 1, 2, 3 - известные коэффициенты кубического сплайна, полученные путем апроксимации эталонной координатной модели железнодорожного пути; s0 - пикетаж начала участка пути.
С помощью спутникового приемника СРНС измеряют дальность D от спутника до мобильного объекта, определяющую уравнение сферы

где х, у, z, xc, yc, zc - координаты антенны приемника и антенны передатчика на спутнике соответственно.
Из совместного решения уравнений (1-4) однозначно вычисляют координаты х, у, z точки приемника и пикетаж s мобильного объекта.
Определение дальностей до других спутников приводит к избыточности измерений. Однозначное и оптимальное статистическое решение (х, у, z, s) в этом случае находят методом наименьших квадратов.
Далее определяют скорость и ускорение движения мобильного объекта как первую и вторую производные пути s по времени.
Измерения дальностей в СРНС проводят через одинаковые и малые (обычно равные 1 сек) интервалы времени dt, поэтому скорость v и ускорение а движения мобильного объекта в любой точке i вычисляют в соответствии с разностной схемой первого и второго порядка по формулам:








где vx, vy, vz, ax, ay, az - проекции скорости и ускорения на оси координат.
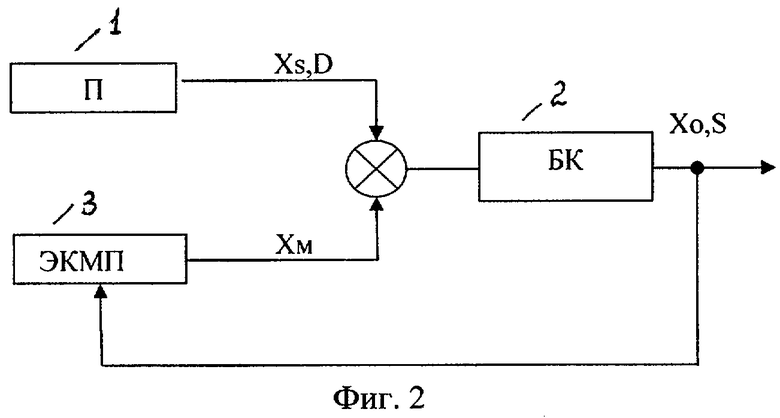
Пример устройства для навигации мобильного объекта железнодорожного транспорта по известной траектории движения, представляющего измерительно-вычислительный комплекс (ИВК), приведен на фиг.2. Измерительно-вычислительный комплекс состоит из приемника 1 ГНСС (П), бортового компьютера 2 (БК) и специализированной геоинформационной системы 3 (СГИС) -ЭКМП, устанавливаемый на любой мобильный объект, передвигающийся по железнодорожному пути.
Определение координат мобильного объекта осуществляют предлагаемым устройством в соответствии со способом, изложенным в формуле изобретения, при этом поступающая из приемника 1 информация о векторе спутниковых координат и информация о векторе координат модели обрабатываются совместно с помощью одного из известных алгоритмов идентификации, в результате работы которого получают вектор искомых координат мобильного объекта и его пикетаж.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ФОРМИРОВАНИЯ ЕДИНОЙ ГЛОБАЛЬНОЙ СИСТЕМЫ ТРЁХМЕРНЫХ КООРДИНАТ НЕПОСРЕДСТВЕННО НА ЭЛЛИПСОИДЕ | 2014 |
|
RU2569487C1 |
| СПОСОБ АДАПТИВНОГО ФОРМИРОВАНИЯ ЕДИНОЙ СИСТЕМЫ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЖЕЛЕЗНЫХ ДОРОГ РОССИИ ПО ГЛОБАЛЬНЫМ КООРДИНАТАМ В НОВОЙ ТРЕХМЕРНОЙ ПРЯМОУГОЛЬНОЙ СИСТЕМЕ КООРДИНАТ НЕПОСРЕДСТВЕННО НА ЭЛЛИПСОИДЕ | 2014 |
|
RU2580436C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭТАЛОННОЙ КООРДИНАТНОЙ МОДЕЛИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287187C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2584541C1 |
| СПОСОБ ПРЯМОЙ ДИФФЕРЕНЦИАЛЬНОЙ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛЬЗОВАТЕЛЕЙ СРЕДНЕОРБИТАЛЬНЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2007 |
|
RU2359283C2 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ МЕСТООПРЕДЕЛЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2638358C2 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2498335C2 |
| ИНТЕГРАЛЬНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2112991C1 |
Изобретение относится к способу спутниковой навигации мобильных объектов железнодорожного транспорта на основе известной траектории движения. Техническим результатом является расширение области применения и повышение точности спутниковой навигации за счет определения координат мобильного объекта путем линейной засечки его спутникового приемника, перемещающегося по известной траектории движения. Технический результат достигается тем, что эталонную координатную модель пути - известную траекторию движения представляют в единой с глобальной навигационной спутниковой системой системе ортогональных геоцентрических координат. Координаты точек эталонной координатной модели выражают в виде трех функций пикетажа, измеряют дальность, по крайней мере, от одного спутника глобальной навигационной спутниковой системы до мобильного объекта, на основе которой составляют уравнение сферы, и из совместного решения трех функций пикетажа и уравнения сферы определяют координаты и пикетаж мобильного объекта, а скорость и ускорение движения мобильного объекта определяют как первую и вторую производные пикетажа по времени по разностной схеме первого и второго порядка. 2 ил.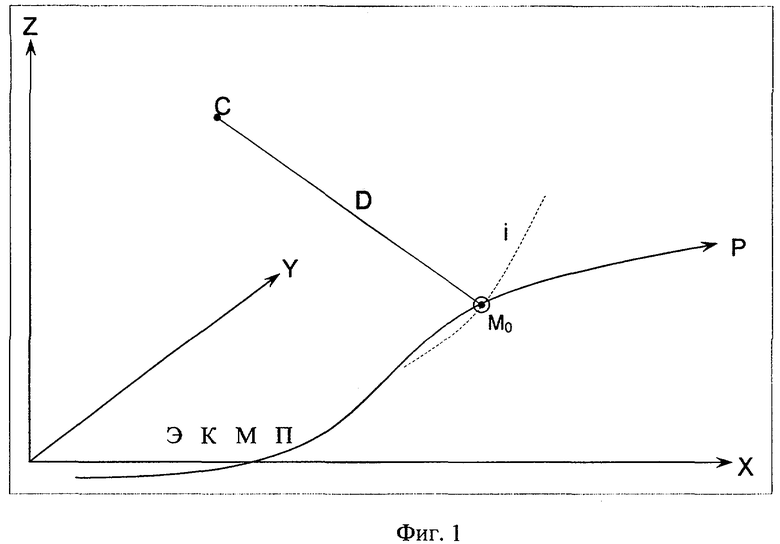
Способ спутниковой навигации мобильных объектов железнодорожного транспорта на основе известной траектории движения, заключающийся в том, что известную траекторию движения - эталонную координатную модель пути представляют в единой с глобальной навигационной спутниковой системой системе ортогональных геоцентрических координат, для чего координаты точек эталонной координатной модели выражают в виде трех функций пикетажа, измеряют дальность, по крайней мере, от одного спутника глобальной навигационной спутниковой системы до мобильного объекта, на основе которой составляют уравнение сферы, и из совместного решения трех функций пикетажа и уравнения сферы определяют координаты и пикетаж мобильного объекта, а скорость и ускорение движения мобильного объекта определяют как первую и вторую производные пикетажа по времени по разностной схеме первого и второго порядка.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ЖЕЛЕЗНОДОРОЖНЫХ ПОЕЗДОВ | 1997 |
|
RU2145423C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭТАЛОННОЙ КООРДИНАТНОЙ МОДЕЛИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287187C1 |
| Устройство для автоматического регулирования температуры, давления и тому подобных величин | 1936 |
|
SU48911A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ФАЗОВЫХ ЦЕНТРОВ АНТЕНН СПУТНИКОВЫХ ИСТОЧНИКОВ НАВИГАЦИОННЫХ СИГНАЛОВ И ФАЗОВЫХ ЦЕНТРОВ АНТЕНН НАВИГАЦИОННОЙ АППАРАТУРЫ ПОЛЬЗОВАТЕЛЕЙ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2210788C2 |
| US 5963167 A, 05.09.1999 | |||
| ЯВОРСКИЙ Б.М | |||
| и ДЕТЛАФ А.А | |||
| Справочник по физике | |||
| - М.: Наука, 1977, с.19-23. | |||

