Изобретение относится к навигации и управлению подвижных объектов наземного транспорта и содержанию геометрии его траектории движения.
В настоящее время навигация всех видов транспорта основана на спутниковых радионавигационных системах (СРНС) типа ГЛОНАСС (Россия), GPS (США) и др. Железнодорожный транспорт имеет преимущество перед другими видами транспорта, состоящее в том, что траектория движения подвижных объектов (ПО) его зафиксирована на местности с высокой точностью, что, в свою очередь, позволяет определить эталонную координатную модель пути (ЭКМП) (Патент РФ на изобретение №2287187, 2005 г. Авторы: С.И. Матвеев, В.М. Круглов, А.С. Матвеев и др. «Способ определения эталонной координатной модели железнодорожного пути и устройство для его осуществления»).
Под ЭКМП понимают метризованные эталонные функции (модели), представленные в виде равномерных (например, метровых) точечных шкал, условно фиксирующих положение рабочих граней левого и правого рельсов и оси пути в трехмерной ортогональной системе координат с точностью, необходимой для диагностики геометрических параметров пути и др., что позволяет выполнять калибровку и самокалибровку датчиков угловых и линейных измерений навигационных систем и самонастройку их по эталонной модели.
Этот способ координирования пути является наиболее близким по технической сущности. Он и взят за прототип.
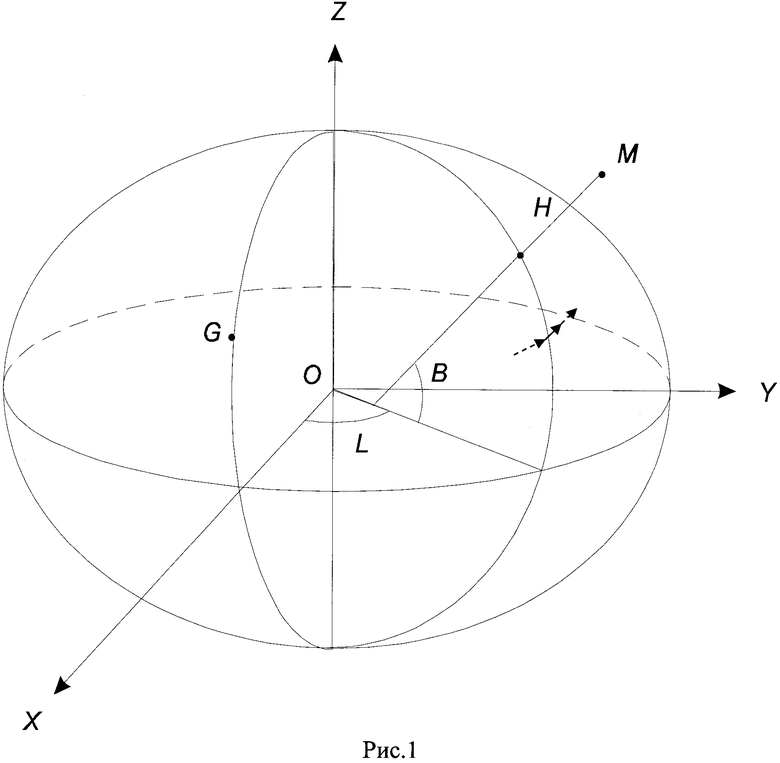
Прототип не обеспечивает точного определения непрерывной эталонной координатной модели на всем протяжении железнодорожных магистралей, т.е. не удовлетворяет основному принципу метрологии - обеспечению единства измерений и требованию Постановления Правительства от 28 декабря 2012 года «О единых государственных системах системах координат» в прямоугольной СК-95/11 и эллипсоидальной B, L, H / 11 формах (Рис. 1).
Ни прямоугольная, ни эллипсоидальная форма неудобны для использования в транспортно-строительном комплексе ни для навигации, ни для проектирования, ни для строительства инженерных сооружений. Технический результат заявляемого объекта состоит в создании траектории движения впервые на всем протяжении железнодорожных магистралей для обеспечения самокалибровки и самонастройки навигационных систем локомотивов, диагностических и выправочных комплексов в единой системе прямоугольных координат.
Сущность заявляемого изобретения состоит в том, что для обеспечения единства измерений на протяжении всех магистралей устанавливают единую, не дающую искажений углов и расстояний систему ортогональных координат непосредственно на эллипсоиде, за счет применения плоских метрических графов малой длины (Б.А. Левин, С.И. Матвеев, И.Н. Розенберг. Теория адаптивных систем навигации и управления движением железнодорожного транспорта на основе глобальной навигационной спутниковой системы ГЛОНАСС и навигационных функций. М.: ВИНИТИ РАН, 2014, 110 с.), что сохраняет единство глобальных координат (впервые) без применения каких-либо картографических проекций. Для этого вначале определяют глобальные трехмерные координаты оси пути измерительно-вычислительным комплексом, подобным указанному на рис. 1, с интервалом 1 м, получая линейные метровые метрические графы, совпадающие с метровыми векторами или линейными метровыми сплайнами, представляющими собой непрерывные функции.
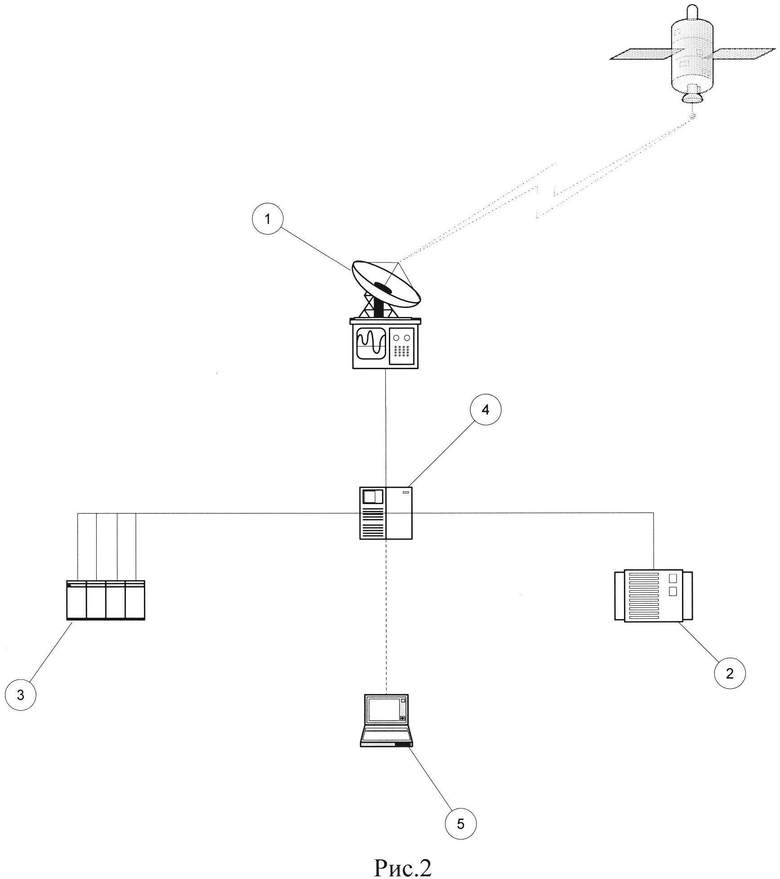
Адаптивный измерительно-вычислительный комплекс (АИВК) состоит из спутникового двухчастотного ГЛОНАСС/GPS приемника (ровера) - 1, бесплатформенной инерциальной системы (БИНС, которые эффективно изготавливать из микроэлектронных механических системах (МЭМС), широко используемых в телекоммуникационных устройствах - 2, датчиков пути и ширины колеи - 3, контроллера для синхронной записи показаний этих измерительных устройств по часам ровера - 4 и персонального компьютера - 5, устанавливаемого на любом ПО (например, на миниатюрной путеизмерительной тележке ПТ-10 фирмы «Твема»), и системы временных базовых станций из спутниковых приемников того же типа, что и ровер, установленных вдоль железнодорожной магистрали через 20-50 км друг от друга.
АИВК и связанный с ним алгоритмический и программный комплекс представляют собой интегрированную специализированную систему для создания эталонных координатных моделей железнодорожного пути.
АИВК этого типа являются универсальными кибернетическими системами. Они могут устанавливаться на путеизмерительные комплексы ЦНИИ-4, КВЛП, выправочные комплексы и др. им подобные для того, чтобы создавать эталонные координатные модели пути. Эти модели являются готовым исходным материалом для проведения выправки пути в плане и профиле при достижении требуемой точности измерений. Однако при создании высокоскоростных железнодорожных направлений ЭКМП следует создавать с размещением АИВК на путеизмерительных тележках.
Полученные ЭКМП используют в способе спутниковой навигации подвижных объектов (ПО) железнодорожного транспорта как известные навигационные функции.
В известных способах спутниковой навигации координаты ПО определяют линейной засечкой от 4 и более спутников и отображают положение ПО на цифровой навигационной карте. В них не обеспечивается обратной связи координат ПО с известной траекторией движения.
Технический результат заявляемого объекта состоит в определении координат путем линейной засечки ПО, перемещающегося по известной навигационной функции даже при отсутствии спутниковых сигналов.
Важным результатом предлагаемого изобретения следует считать разработку геоинформационной технологии создания эталонных координатных моделей железнодорожного пути, включающей следующие основные составляющие:
1. Временную ДП ГНСС и трехмерную составную системы координат железнодорожной магистрали,
2. Адаптивный измерительно-вычислительный комплекс (АИВК) для создания ЭКМП на основе комплексирования инерциальных и спутниковых измерений,
3. Адаптивный алгоритм стохастической фильтрации комплексированных измерений основанный на рекуррентной обработке поступающих инерциальных и спутниковых измерений, приводимых к равноточному виду и последующее их решение методом плоских ортогональных вращений Гивенса,
4. Адаптивную систему определения эталонных координатных моделей железнодорожного пути.
Эти составляющие геоинформационной технологии полностью вошли в патент РФ на изобретение №2287187, 2005. Именно они, как и вся геоинформационная технология, являются важными компонентами предлагаемого изобретения. Ниже, на рис. 3, для наглядности приведена блок-схема этой технологии.
Приведенная в этом разделе геоинформационная технология создания эталонных координатных моделей пути включает адаптивный измерительно-вычислительный комплекс (АИВК) и адаптивный алгоритм стохастической фильтрации (ААСФ), в которых самонастройка (адаптация) осуществляется адаптивными алгоритмами контроллера и персонального компьютера. Придание алгоритмам свойств самонастройки (адаптации) существенно расширяет возможности измерительных и навигационных систем. Как видно из рис. 2, представленная геоинформационная технология содержит три контура самонастройки, и потому сама может быть отнесена к классу адаптивных геоинформационных технологий.
Поскольку полученные в результате принятой технологии координаты фиксируют метровые векторы оси пути, их логично представлять координатами концов этих векторов.
Далее авторы переходят от ЭКМП к существу изобретения - совершенно новой (ранее неизвестной) системе трехмерных прямоугольных координат, впервые полученной без использования каких-либо картографических проекций. Для этого предлагаем вычислять координаты x, y и z каждого метрового вектора непосредственно на эллипсоиде, для чего воспользуемся техникой вычисления топоцентрических координат (С.И. Матвеев, В.А. Коугия. Высокоточные цифровые модели пути и спутниковая навигация железнодорожного транспорта. М.: Маршрут, 2005, 290 с.), вычисляя приращения координат Δxi+1, Δyi+1, Δzi+1 между концами каждого вектора по формуле

или, переходя к строчной записи для приращений Δxi+1, Δyi+1, Δzi+1, будем иметь

Поскольку все вычисления проходят на эллипсоиде очень короткими отрезками длиной 1 м, то приращения координат, вычисленные по формуле (2), не подвержены искажениям за кривизну эллипсоида, и мы получаем новую прямоугольную систему координат, вычисляя координаты xi+1, yi+1, и zi+1 концов каждого вектора по рекуррентным формулам
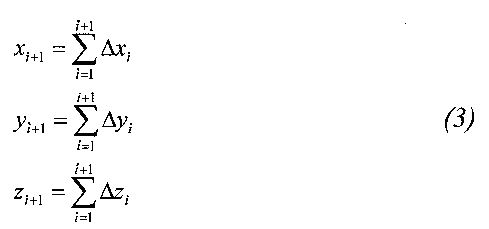
Достоинством способа является полная независимость вычисления координат в любом районе железнодорожной сети. Так для любого железнодорожного пути с номером j, состоящего из к метровых интервалов, формулы (3) остаются справедливыми. Высоты z, вычисленные по последней формуле, являются нормальными, а не эллипсоидальными, что позволяет отказаться от обычно применяемого при создании профилей - геометрического нивелирования. Более того, наличие в концах каждого метрового вектора нормальных z и эллипсоидальных H высот позволяет выполнить съемку уклонений высот, что является также новым результатом предлагаемого изобретения.
Полученные по формулам (2-3) эталонные координатные модели траекторий движения могут быть названы навигационными функциями. Они являются новым классом непрерывных опорных геодезических сетей специального назначения и могут эффективно использоваться взамен создаваемых на скоростных магистралях реперных систем контроля плана и профиля пути.
На их основе могут быть созданы стратегически безопасные автономные самокалибрующиеся и самонастраивающиеся по навигационным функциям навигационные системы железнодорожного транспорта без использования спутниковых технологий (технологий двойного назначения), что особенно важно в современных политических условиях. Подводя итог всему изложенному, можно сделать вывод, что разработаны:
1. Новая система единых трехмерных глобальных координат, подтвержденная формулами (2-3), пригодная для создания единых прямоугольных глобальных координат для всех видов транспорта и транспортно-строительного комплекса в целом;
2. Абсолютно безопасная система навигации всех видов транспорта, не требующая в процессе движения ПО наличия спутниковых сигналов;
3. Новый способ создания единой безошибочной системы пикетажа, освобождающей железнодорожников от нарушающих целостность системы железных дорог так называемых «резаных» пикетов и километров.
Источники информации
1. Патент РФ на изобретение №2287187, 2005 г. Авторы: С.И. Матвеев, В.М. Круглов, А.С. Матвеев и др. «Способ определения эталонной координатной модели железнодорожного пути и устройство для его осуществления».
2. С.И. Матвеев, В.А. Коугия. Высокоточные цифровые модели пути и спутниковая навигация железнодорожного транспорта. М.: Маршрут, 2005, 290 с.
3. Б.А. Левин, С.И. Матвеев, И.Н. Розенберг. Теория адаптивных систем навигации и управления движением железнодорожного транспорта на основе глобальной навигационной спутниковой системы ГЛОНАСС и навигационных функций. М.: ВИНИТИ РАН, 2014, 110 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ФОРМИРОВАНИЯ ЕДИНОЙ ГЛОБАЛЬНОЙ СИСТЕМЫ ТРЁХМЕРНЫХ КООРДИНАТ НЕПОСРЕДСТВЕННО НА ЭЛЛИПСОИДЕ | 2014 |
|
RU2569487C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭТАЛОННОЙ КООРДИНАТНОЙ МОДЕЛИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287187C1 |
| СПОСОБ СПУТНИКОВОЙ НАВИГАЦИИ МОБИЛЬНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА НА ОСНОВЕ ИЗВЕСТНОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ | 2008 |
|
RU2380721C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2579606C1 |
| ПРОСТРАНСТВЕННО-ВРЕМЕННАЯ СИСТЕМА РЕАЛЬНОГО ВРЕМЕНИ | 2005 |
|
RU2274953C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| Способ построения Мировой космической геодезической сети с применением результатов наблюдений космических аппаратов спутниковых навигационных систем | 2021 |
|
RU2776698C1 |
| Способ интеграции систем и/или средств обеспечения навигационной и мониторинговой информацией и аппаратно-программный комплекс - центр компетенций | 2017 |
|
RU2654237C1 |
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЕЙ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ РАЗМЕТКИ УЧАСТКОВ УЛИЧНО-ДОРОЖНОЙ СЕТИ | 2016 |
|
RU2633093C1 |
Изобретение относится к навигации подвижных железнодорожных объектов. Техническим результатом является обеспечение самокалибровки и самонастройки навигационных систем локомотивов. В способе на протяжении всех магистралей устанавливают единую систему ортогональных координат непосредственно на эллипсоиде, определяют глобальные трехмерные координаты оси пути измерительно-вычислительным комплексом, с интервалом 1 м, получают линейные метровые метрические графы, совпадающие с метровыми векторами или линейными метровыми сплайнами, представляющими собой непрерывные функции. 3 ил.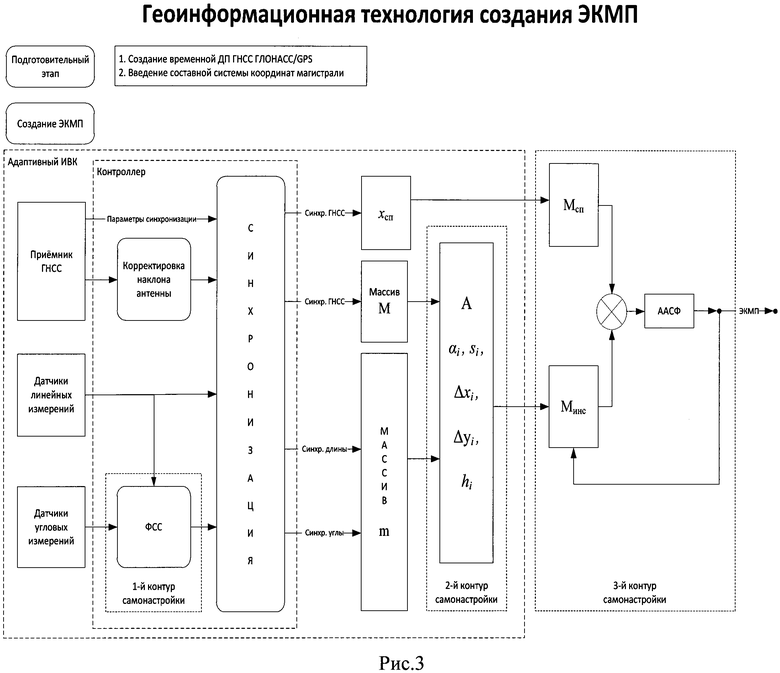
Способ адаптивного формирования единой системы траекторий движения железных дорог России по глобальным координатам в новой трехмерной прямоугольной системе координат непосредственно на эллипсоиде, осуществляемый путем определения эталонной координатной модели пути (ЭКМП), отличающийся тем, что создают траектории движения на всем протяжении железнодорожных магистралей для обеспечения самокалибровки и самонастройки навигационных систем локомотивов, диагностических и выправочных комплексов в единой системе прямоугольных координат, кроме того, для обеспечения единства измерений на протяжении всех магистралей устанавливают единую, не дающую искажений углов и расстояний систему ортогональных координат непосредственно на эллипсоиде, за счет применения плоских метрических графов малой длины, что сохраняет единство глобальных координат без применения каких-либо картографических проекций, при этом вначале определяют глобальные трехмерные координаты оси пути измерительно-вычислительным комплексом, с интервалом 1 м, получая линейные метровые метрические графы, совпадающие с метровыми векторами или линейными метровыми сплайнами, представляющими собой непрерывные функции.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭТАЛОННОЙ КООРДИНАТНОЙ МОДЕЛИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287187C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕСУРСОВ В ПРЕДЕЛАХ ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 2006 |
|
RU2473443C2 |
| СПОСОБ СПУТНИКОВОЙ НАВИГАЦИИ МОБИЛЬНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА НА ОСНОВЕ ИЗВЕСТНОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ | 2008 |
|
RU2380721C1 |
| Способ электролитического хромирования | 1921 |
|
SU12943A1 |
| US 20100017115 A1, 21.01.2010 | |||
| US 20090099774 A1, 16.04.2009. | |||

