Изобретение относится к метрологическому обеспечению навигационных систем железнодорожного транспорта и содержания геометрии железнодорожных путей.
В настоящее время навигация всех видов транспорта основана на спутниковых радионавигационных системах (СРНС) типа ГЛОНАСС (Россия), GPS (США) и др. Железнодорожный имеет преимущество перед другими видами транспорта, состоящее в том, что траектория движения подвижных объектов (ПО) его зафиксирована на местности с высокой точностью, что, в свою очередь, позволяет определить эталонную координатную модель пути (ЭКМП) железнодорожной магистрали. Эта возможность пока не использована. Настоящее изобретение собственно и направлено на реализацию такой возможности.
Под ЭКМП понимают метризованные эталонные функции (модели), представленные в виде равномерных (например, метровых) точечных шкал, условно фиксирующих положение рабочих граней левого и правого рельсов в трехмерной ортогональной системе координат с точностью, необходимой для диагностики геометрических параметров пути. Такое определение позволяет отнести ЭКМП к групповым рабочим эталонам, позволяющим определять основные геометрические параметры пути (координаты, длины отрезков, продольные и поперечные уклоны, возвышения рельсов, стрелы изгиба, просадки, рихтовки и др.), выполнять калибровку и самокалибровку датчиков угловых и линейных измерений навигационных систем и самонастройку их по эталонной модели.
В известном способе определения пространственных параметров рельсового пути и устройства для его осуществления /1/ определяют координаты левого и правого рельсов путем измерения эйлеровых углов гироскопическим курсокреноуказателем и расстояний датчиками пути и ширины колеи, установленными на путеизмерительной тележке.
Этот способ координирования пути является наиболее близким по технической сущности. Он и взят за прототип.
Прототип не обеспечивает точного определения непрерывной эталонной координатной модели на всем протяжении железнодорожной магистрали, т.е. не удовлетворяет основному принципу метрологии - обеспечению единства измерений.
Технический результат заявляемого объекта состоит в создании ЭКМП на всем протяжении железнодорожной магистрали для обеспечения самокалибровки и самонастройки навигационных систем локомотивов, диагностических и выправочных комплексов.
Сущность заявляемого изобретения состоит в том, что для обеспечения единства измерений на протяжении всей магистрали устанавливают единую, не дающую практически значимых искажений углов и расстояний систему ортогональных координат в проекции В.А. Коугия. Центральной линией проекции и осью абсцисс на поверхности земного эллипсоида принимают геодезическую линию, совпадающую с главным направлением магистрали. Ординатами на эллипсоиде принимают геодезические нормали к оси абсцисс.
Положение любой точки М железнодорожного пути на эллипсоиде (фиг.1а) и на плоскости (фиг.1б) определяется одинаковыми координатами х и y, измеренными в первом случае - по геодезическим, во втором - по прямым линиям. При отклонениях пути от оси абсцисс до 50 км, искажения углов и расстояний являются пренебрежимыми, следовательно, координатные модели пути в такой системе координат, определенные с достаточной для диагностики геометрии пути точностью, являются эталонными. Третья координата - высота Н - определяется в общепринятой ортометрической системе высот.
Для повышения точности результатов координирование выполняют путем совместного оценивания параметров (координат точек модели) по результатам комплексированных спутниковых, гироскопических и дальномерных измерений. Для этого вдоль магистрали создают систему временных базовых станций СРНС из двухчастотных геодезических приемников, установленных через 50-100 км друг от друга. На ПО устанавливают измерительно-вычислительный комплекс (ИВК), включающий подвижный спутниковый приемник (ровер), датчик эйлеровых углов, датчики пути и ширины колеи, контроллер и персональный компьютер. При проезде ПО по магистрали контроллер непрерывно ведет синхронную запись показаний всех измерительных устройств ИВК. Параллельно ведется непрерывная запись спутниковой информации на временных базовых станциях, функционирующих на время проезда ИВК по всей магистрали.
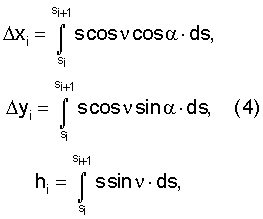
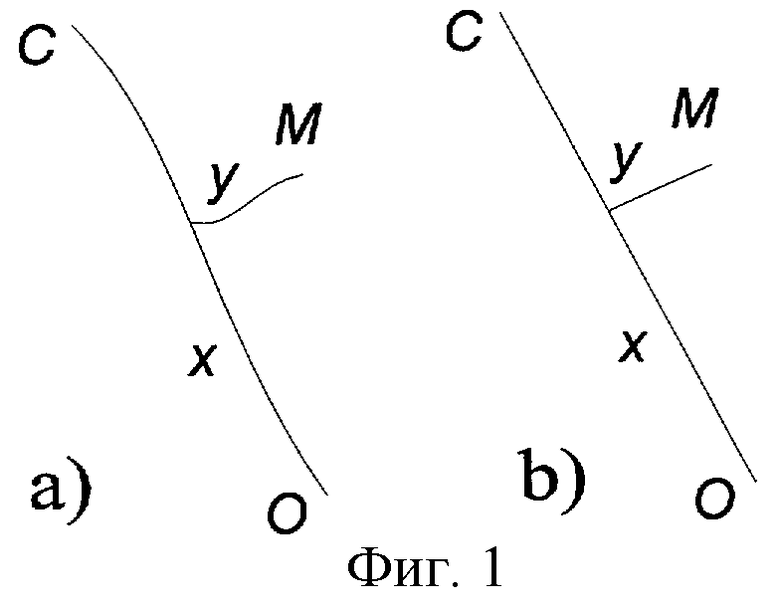
Для компенсации влияния перекосов и эксцентриситета колес показания датчика эйлеровых углов сглаживают фильтром скользящего среднего на интервале скольжения, равном длине окружности колеса ПО. В моменты приема спутниковых измерений ti фиксируют значения сглаженного курсового угла аi, поперечного qi и продольного νi углов наклона, датчика пути si и спутниковые координаты хi, yi, полученные из относительных фазовых определений. В координаты вводят поправки за продольный и поперечный наклоны. В соответствии с фиг.2 формулы вычисления координат оси пути имеют вид
где αi - дирекционный угол курса ПО в точке i; δα=arctan(p/t); р=acos(ν)sin(k); t=acos(k)sin(ν);  ; xа; yа; На - спутниковые координаты центра антенны; а - длина антенны.
; xа; yа; На - спутниковые координаты центра антенны; а - длина антенны.
По координатам оси пути из решения обратных геодезических задач вычисляют последовательные дирекционные углы αi, горизонтальные проложения  и эталонный пикетаж пути
и эталонный пикетаж пути
На прямых участках пути образуют последовательность точек j, расположенных на значительном (порядка 0.5-2 км) друг от друга. Для этих точек вычисляют средние весовые значения дирекционных углов прямых участков  , после чего формируют двумерные массивы спутниковых М и зафиксированных с датчиков m полярных координат
, после чего формируют двумерные массивы спутниковых М и зафиксированных с датчиков m полярных координат
вычисляют средние координаты  ,
,  ,
,  ,
,  , вычитая которые из соответствующих элементов массивов М и m, получают массивы центральных координат
, вычитая которые из соответствующих элементов массивов М и m, получают массивы центральных координат  и
и  после чего вычисляют матрицу центроаффинных преобразований А по формуле:
после чего вычисляют матрицу центроаффинных преобразований А по формуле:

После этого, показания датчиков si и ai во всех точках i, принадлежащих интервалу пути от точки j-1 до точки j, перевычисляют в эталонные по формуле:
При таком преобразовании происходит масштабирование и калибровка показаний датчика пути  и калибровка показаний курсового угла
и калибровка показаний курсового угла  Во всех приведенных формулах угловые величины выражены в радианной мере.
Во всех приведенных формулах угловые величины выражены в радианной мере.
Показания продольного и поперечного углов наклона калибруют по показаниям цифровых электронных уровней, ориентированных по продольной и поперечной осям ПО.
После калибровки все виды комплексированных измерений: эйлеровы углы, расстояния и спутниковые координаты представляют собой практически независимые случайные последовательности. С их помощью образуют два параллельных и совпадающих по расстоянию потока информации:
- последовательность векторов спутниковых координат хi сопровождается ковариационными матрицами К(х)i. Эта последовательность образует протяженную доверительную область диаметром 20-50 мм;
- соответствующие приращения координат dxi, полученные численным интегрированием полярных координат p: показаний гироскопа (дирекционные углы и продольные углы наклона t) и датчика пути (s) как
Приращения, за счет проведенных ранее процедур фильтрации, обладают высокой точностью - порядка 1 мм на 10 м пути.
Пренебрегая кривизной траектории на интервале i-(i+1), и дифференцируя dxi, по всем переменным, получим

По теореме о ковариации векторной функции, для ковариационной матрицы приращений K(dx)i, будем иметь

Совместная обработка этих потоков рекуррентным обобщенным методом наименьших квадратов по принципу учета ошибок исходных данных позволяет сохранить точность спутниковых измерений на дальних расстояниях и взаимную высокую точность точек пути на расстояниях до 100 и более метров.
Из косвенных измерений хi и dxi, поступающих из контроллера на ПК, формируют статистическую модель Гаусса-Маркова:

с матрицами А и К(l) квазидиагональной структуры. Диагональные блоки их шестого порядка имеют вид

где I - единичные матрицы третьего порядка, К(l), К(х)ii и К(dx)ii - ковариационные матрицы векторов измерений  ,
,  и
и  .
.
Для повышения эффективности оценивания систему (7) умножением слева на К(l)-1/2 приводят к равноточному виду

где μ - средняя квадратическая ошибка единицы веса, а блоки  имеют вид
имеют вид
и осуществляют прямое решение квазидиагональной системы (9) с помощью плоских вращений Гивенса, позволяющих оценивать каждое измерение обобщенным рекуррентным методом наименьших квадратов, выполнять отбраковку грубых измерений, накапливать квадратичную форму вектора поправок νTК(l)-1ν. В результате система (9) приводится к верхнетреугольной ленточной форме

решение которой (оценку  ) находят методом обратной подстановки, после чего вычисляют среднюю квадратическую ошибку единицы веса
) находят методом обратной подстановки, после чего вычисляют среднюю квадратическую ошибку единицы веса
Для решения вопроса оценки точности вычисляют ковариационную матрицу параметров
или только диагональные элементы ее, позволяющие вычислить средние квадратические ошибки параметров 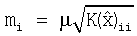 .
.
Исследования показали, что при высокой точности определения приращений, точность оценивания параметров х повышается пропорционально  , где m - число точек спутниковых определений, а результаты оценивания совпадают с оценками калмановской фильтрации.
, где m - число точек спутниковых определений, а результаты оценивания совпадают с оценками калмановской фильтрации.
Для протяженных магистралей применяют принцип авторегрессионных преобразований скользящего среднего, когда вращения Гивенса выполняют на скользящем интервале из k≪m точек без ощутимой потери точности.
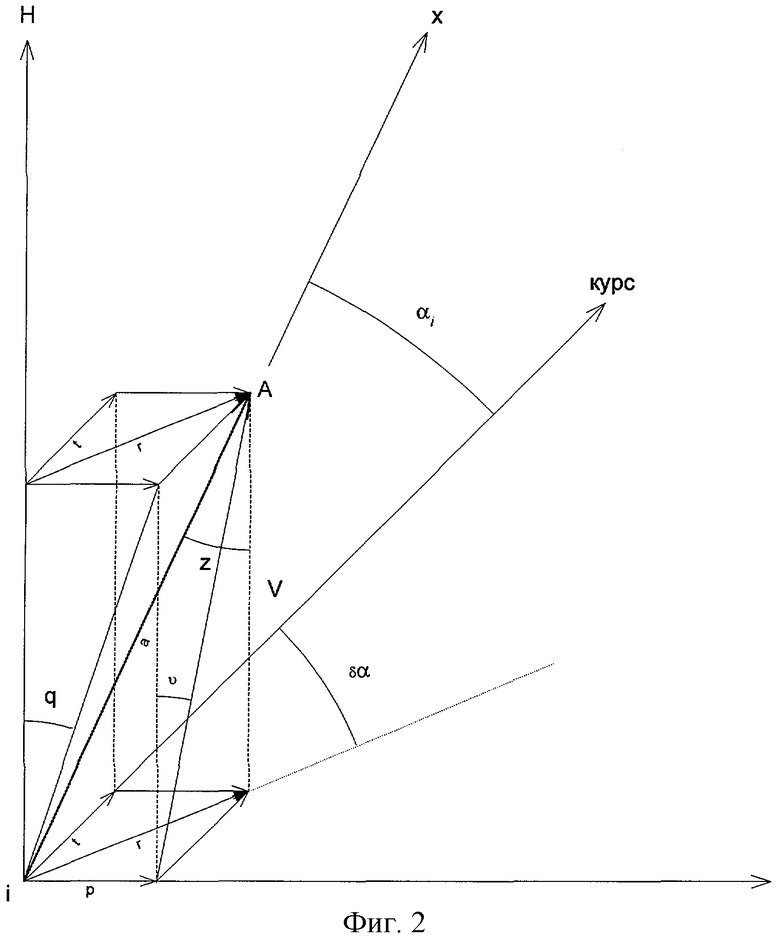
Устройство для определения эталонной координатной модели пути, включающее ИВК (см. фиг.3), состоящий из спутникового двухчастотного ГЛОНАСС/GPS приемника (ровера) - 1, гироскопического датчика эйлеровых углов - 2, датчиков пути и ширины колеи - 3, контроллера для синхронной записи показаний этих измерительных устройств по часам ровера - 4 и персонального компьютера - 5, устанавливаемого на любом ПО (например, путеизмерительном комплексе ЦНИИ-4), и системы временных базовых станций из спутниковых приемников того же типа, что и ровер, установленных вдоль железнодорожной магистрали через 50-100 км друг от друга.
Определение координат точек модели осуществляют предлагаемым устройством способом, изложенным в п.1 настоящего изобретения. Другими отличиями от прототипа является наличие двухчастотных спутниковых приемников, установленных на ПО и системы временных базовых станций; наличие в контроллере процедур фильтрации эйлеровых углов фильтром скользящего среднего на интервале скольжения, равном длине окружности колеса ПО, и синхронизации показаний всех измерительных устройств ИВК по показаниям времени часов спутникового приемника ровера.
Заявленные изобретения взаимосвязаны настолько, что образуют единый изобретательский замысел. Действительно, для заявляемого способа определения эталонной координатной модели ж.д. пути было изобретено устройство для его осуществления. Следовательно, заявляемые изобретения удовлетворяют требованию единства изобретения.
Полученные эталонные координатные модели пути являются новым классом непрерывных опорных геодезических сетей специального назначения и могут эффективно использоваться взамен создаваемых на скоростных магистралях реперных систем контроля плана и профиля пути.
На основе ЭКМП могут быть созданы стратегически безопасные автономные самокалибрующиеся и самонастраивающиеся по эталонным координатным моделям навигационные системы железнодорожного транспорта без использования спутниковых технологий (технологий двойного назначения).
Источники информации
1. Щербаков В.В., Круглов В.М. и др. Патент на изобретение: Способ определения пространственных параметров рельсового пути и устройство для его осуществления. Заявка №2003111110/11(011816) от 17.04.2003 (прототип).
2. Матвеев С.И., Коугия В.А., Цветков В.Я. Геоинформационные системы и технологии на железнодорожном транспорте. - М.: УМК МПС России, 2002. - С.288.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ФОРМИРОВАНИЯ ЕДИНОЙ ГЛОБАЛЬНОЙ СИСТЕМЫ ТРЁХМЕРНЫХ КООРДИНАТ НЕПОСРЕДСТВЕННО НА ЭЛЛИПСОИДЕ | 2014 |
|
RU2569487C1 |
| СПОСОБ АДАПТИВНОГО ФОРМИРОВАНИЯ ЕДИНОЙ СИСТЕМЫ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЖЕЛЕЗНЫХ ДОРОГ РОССИИ ПО ГЛОБАЛЬНЫМ КООРДИНАТАМ В НОВОЙ ТРЕХМЕРНОЙ ПРЯМОУГОЛЬНОЙ СИСТЕМЕ КООРДИНАТ НЕПОСРЕДСТВЕННО НА ЭЛЛИПСОИДЕ | 2014 |
|
RU2580436C2 |
| СПОСОБ СПУТНИКОВОЙ НАВИГАЦИИ МОБИЛЬНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА НА ОСНОВЕ ИЗВЕСТНОЙ ТРАЕКТОРИИ ДВИЖЕНИЯ | 2008 |
|
RU2380721C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ МЕСТООПРЕДЕЛЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2638358C2 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2014 |
|
RU2582428C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ОТНОСИТЕЛЬНЫХ ОПРЕДЕЛЕНИЙ ПАРАМЕТРОВ | 2011 |
|
RU2469273C1 |
| Способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем | 2023 |
|
RU2821670C1 |
Изобретение относится к метрологическому обеспечению навигационных систем железнодорожного транспорта и содержания геометрии железнодорожных путей. Сущность: координируют рабочие грани рельсового пути через заданный интервал пикетажа с помощью установленного на подвижный объект (ПО) измерительно-вычислительного комплекса (ИВК). ИВК включает ровер, гироскопический датчик эйлеровых углов, датчики пути и ширины колеи, контроллер, персональный компьютер. Для обеспечения единства измерений на железнодорожной магистрали принимают единую трехмерную ортогональную систему координат в проекции В.А. Коугия. При этом ось абсцисс на поверхности земного эллипсоида совмещают с геодезической линией, совпадающей с главным направлением магистрали. Ординатами принимают геодезические нормали к оси абсцисс. Основу системы координат составляет система временных базовых станций СРНС. Станции СРНС располагают вдоль магистрали через 50-100 км на время проезда ИВК. Ведется непрерывная синхронная запись показаний всех устройств и спутниковых приемников базовых станций. Координатные модели пути, не имеющие в такой системе значимых искажений углов и расстояний, принимают за эталонные. Для компенсации систематических погрешностей показания датчика эйлеровых углов ИВК сглаживают фильтром скользящего среднего на интервале скольжения, равном длине окружности колеса ПО. В спутниковые координаты приема ровера ИВК вводят поправки на наклон антенны. Показания курсового датчика пути калибруют способом центроаффинных преобразований, переводя их в последовательность дирекционных углов и масштабированных горизонтальных проложений. Выполняют совместное оценивание комплексированных измерений и параметров статистической модели рекуррентным обобщенным методом наименьших квадратов. Технический результат: повышение точности определения эталонной координатной модели. 2 н.п. ф-лы, 3 ил.
| RU 2003111110 А, 20.10.2004 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1991 |
|
RU2026448C1 |
| JP 2002083321 А, 22.03.2002 | |||
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ПЛАНА И ПРОДОЛЬНОГО ПРОФИЛЯ ПУТИ | 1973 |
|
SU432262A1 |

