Область техники
Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано в системах определения направления на источники радиоизлучения, работающие на одной частоте.
Уровень техники
Многосигнальное пеленгование источников радиоизлучения (ИРИ) имеет место в процессе мониторинга радиоэлектронной обстановки при многолучевом распространении радиоволн, воздействии преднамеренных и непреднамеренных помех, отражениях сигнала от различных объектов и слоев атмосферы.
Известен способ определения двумерного пеленга [1], при котором достигается следующее.
1. Принимают многолучевой сигнал источника электромагнитного излучения
антенной решеткой из N+1 элементов и формируют ансамбль сигналов xn (t), зависящих от времени t и номера антенного элемента n=0, …, N.
2. Синхронно преобразуют ансамбль принятых сигналов xn (t) в цифровые сигналы
xn(z), где z - номер временного отсчета сигнала.
3. Преобразуют цифровые сигналы xn(z) в сигнал комплексного амплитудно-фазового распределения (АФР)  описывающий амплитуды и фазы сигналов, принятых элементами решетки. Запоминают сигнал АФР
описывающий амплитуды и фазы сигналов, принятых элементами решетки. Запоминают сигнал АФР 
4. Генерируют и запоминают идеальный двумерный сигнал  комплексной фазирующей функции размером N×М, зависящий от заданной частоты приема и описывающий возможные направления прихода сигнала от каждого потенциального источника, где М - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигналов по азимуту αm и углу места βm,
комплексной фазирующей функции размером N×М, зависящий от заданной частоты приема и описывающий возможные направления прихода сигнала от каждого потенциального источника, где М - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигналов по азимуту αm и углу места βm,  - номер направления.
- номер направления.
5. Используя восстановленный вектор АФР  и сигнал фазирующей функции
и сигнал фазирующей функции  синтезируют по известному алгоритму псевдообращения начальное приближение углового спектра сигнала
синтезируют по известному алгоритму псевдообращения начальное приближение углового спектра сигнала  которое запоминают для использования на очередной итерации.
которое запоминают для использования на очередной итерации.
6. Восстанавливают угловой спектр мощности  углового спектра сигнала
углового спектра сигнала  k≥1, полученного на предыдущей итерации.
k≥1, полученного на предыдущей итерации.
7. Возводя смещенное на малую положительную величину полученное приближение углового спектра мощности  в степень
в степень  формируют зависящий от предыдущего решения двумерный взвешивающий сигнал размером M×M в форме диагональной матрицы
формируют зависящий от предыдущего решения двумерный взвешивающий сигнал размером M×M в форме диагональной матрицы
 где p<1,
где p<1,  - m-й элемент вектора
- m-й элемент вектора  ε - малое число.
ε - малое число.
8. Используя полученный взвешенный сигнал  и запомненные сигналы
и запомненные сигналы  и
и  формируют взвешенный сигнал фазирующей функции
формируют взвешенный сигнал фазирующей функции  сигнал весовых коэффициентов
сигнал весовых коэффициентов  взвешивающий сигнал АФР
взвешивающий сигнал АФР  вектор взвешенного АФР
вектор взвешенного АФР  и зависящий от предыдущего решения текущий угловой спектр сигнала
и зависящий от предыдущего решения текущий угловой спектр сигнала  который запоминают для использования на очередной итерации.
который запоминают для использования на очередной итерации.
9. Сравнивают энергию разности угловых спектров  полученных на текущей и предыдущей итерации, с порогом δ. Значение порога выбирается, например, из условия
полученных на текущей и предыдущей итерации, с порогом δ. Значение порога выбирается, например, из условия 
10. При невыполнении условия  инициализируется очередная итерация синтеза углового спектра, на которой повторяются операции последовательного формирования сигналов
инициализируется очередная итерация синтеза углового спектра, на которой повторяются операции последовательного формирования сигналов 

 запоминания
запоминания  и сравнения энергии разности угловых спектров
и сравнения энергии разности угловых спектров  с порогом δ.
с порогом δ.
11. При выполнении условия  восстанавливают спектр мощности
восстанавливают спектр мощности  углового спектра сигнала
углового спектра сигнала  полученного на текущей итерации синтеза, по максимумам которого определяют азимут α и угол места β каждого луча принятого многолучевого сигнала.
полученного на текущей итерации синтеза, по максимумам которого определяют азимут α и угол места β каждого луча принятого многолучевого сигнала.
12. Полученные двумерные пеленги (α, β) выделенных лучей отображаются на картографическом фоне, чем обеспечивается повышение информативности пеленгования. Недостатки данного способа следующие.
- Угловой спектр  получают по формуле
получают по формуле
 где
где  p<1, что не гарантирует устойчивости решения к малым вариациям сигнала
p<1, что не гарантирует устойчивости решения к малым вариациям сигнала  Поскольку сигнал
Поскольку сигнал  получают на основе физических измерений, он неизбежно содержит в себе помеху. Таким образом, невозможно гарантировать устойчивое получение углового спектра
получают на основе физических измерений, он неизбежно содержит в себе помеху. Таким образом, невозможно гарантировать устойчивое получение углового спектра 
- Нет гарантии выполнения условия для угловых спектров  за конечное число итераций.
за конечное число итераций.
- Результатом итерационного процесса является точечная оценка углового спектра  которая не позволяет судить о ее надежности, так как имеет место помеха в сигнале АФР
которая не позволяет судить о ее надежности, так как имеет место помеха в сигнале АФР  а также в сигнале фазирующей функции
а также в сигнале фазирующей функции  (несущая частота и геометрические параметры АС также содержат погрешности).
(несущая частота и геометрические параметры АС также содержат погрешности).
Указанные недостатки очевидно не позволят применять способ в реальных условиях из-за его недопустимо низкой практической эффективности (надежности, устойчивости и сходимости решения).
Раскрытие изобретения
Техническим результатом является повышение эффективности определения точечных оценок азимутальных и угломестных пеленгов источников радиоизлучения, а также повышение надежности результатов за счет получения интервальных оценок решения. Эффективность предлагаемого способа обеспечивается использованием аппарата многокритериального математического программирования, позволяющего учесть всевозможные виды дополнительных условий, которым должна удовлетворять оценка решения.
Способ пеленгования с повышенной эффективностью включает прием многолучевого сигнала многоэлементной антенной решеткой, синхронное преобразование ансамбля принятых сигналов, зависящих от времени и номера антенного элемента, в цифровые сигналы, преобразование цифровых сигналов в сигнал  , описывающий распределение амплитуд и фаз на элементах решетки, формирование сигнала комплексной фазирующей функции, описывающего возможные направления прихода от каждого потенциального источника на заданной частоте приема.
, описывающий распределение амплитуд и фаз на элементах решетки, формирование сигнала комплексной фазирующей функции, описывающего возможные направления прихода от каждого потенциального источника на заданной частоте приема.
Отличается тем, что получение углового спектра осуществляют введением переопределенного базиса посредством сетки пеленгов для формирования из исходной системы нелинейных уравнений системы линейных алгебраических уравнений (СЛАУ) и решением этой системы посредством формирования нескольких целевых функций и использованием, в зависимости от предъявляемых требований (критериев) эффективности, одного из методов многокритериального математического программирования, сведением многокритериальной задачи к однокритериальной задаче с ограничениями, получением итерационными вычислительными процедурами решения указанной однокритериальной задачи с ограничениями, определением по максимумам спектра мощности  полученного углового спектра сигнала
полученного углового спектра сигнала  точечных сигналов азимута α и угла места β каждого луча принятого многолучевого сигнала.
точечных сигналов азимута α и угла места β каждого луча принятого многолучевого сигнала.
Для дополнительного определения интервальных оценок указанных точечных сигналов на основе теоремы Крамера-Рао используют ковариационную матрицу решений, сформированную с помощью функции правдоподобия, связанной с указанной исходной системой нелинейных уравнений.
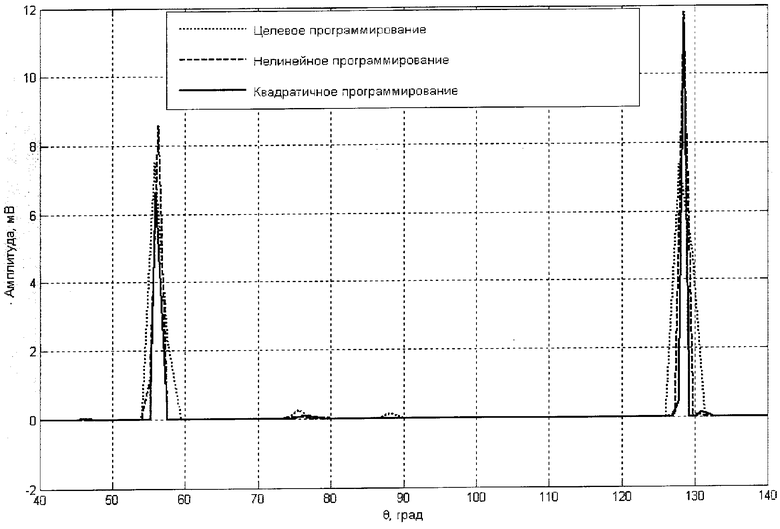
Результаты точечных и интервальных оценок пеленгов далее можно представлять в визуальном графическом виде для последующей работы людей с ними, представленном на чертеже, где
- показаны графики пеленгационной панорамы примера реализации способа с применением разных методов многокритериального математического программирования.
Осуществление изобретения
Необходимо определение следующих параметров ИРИ, присутствующих в эфире: количество; амплитуды (мощности) излучаемых сигналов; азимутальные пеленги и угломестные пеленги.
В качестве практически оправданного допущения для предлагаемого способа сигналы рассматривают как детерминированные, подверженные аддитивной помехе, оценки параметров которых подлежат определению.
Поскольку на результаты измерений неизбежно накладывается помеха, а также имеют место ошибки измерений, обусловленные используемой аппаратурой, дополнительно желательно получить не только точечные оценки искомых параметров, но и их ковариационные матрицы или, по крайней мере, дисперсии, для получения интервальных оценок.
Полагаем, что в эфире присутствует K ИРИ с азимутальными пеленгами  угломестными пеленгами
угломестными пеленгами  и амплитудами (мощностями) излучаемых сигналов
и амплитудами (мощностями) излучаемых сигналов 
 сигнал комплексного АФР, описывающий амплитуды и фазы сигналов, принятых элементами АС, где N+1 - количество элементов АС. Используемый вид модуляции (амплитудная, частотная, фазовая и др.) не имеет принципиального значения.
сигнал комплексного АФР, описывающий амплитуды и фазы сигналов, принятых элементами АС, где N+1 - количество элементов АС. Используемый вид модуляции (амплитудная, частотная, фазовая и др.) не имеет принципиального значения.
В общем случае исходная система нелинейных уравнений относительно неизвестных α, β и  имеет следующий вид:
имеет следующий вид:

где n(t) - вектор аддитивной помехи, имеющей нулевое математическое ожидание и ковариационную матрицу вида σ2I, I - единичная матрица, σ - среднеквадратическое отклонение (СКО); матрица  (фазирующая функция) формируется с учетом вида сигналов, пеленгуемых ИРИ, и пространственной конфигурации АС.
(фазирующая функция) формируется с учетом вида сигналов, пеленгуемых ИРИ, и пространственной конфигурации АС.
Требуется определить для каждого из одновременно поступивших на АС сигналов амплитуду (мощность) sk, азимутальный пеленг αk и угломестный пеленг βk.
Линеаризуем нелинейную модель (1) при помощи введения переопределенного базиса посредством сетки пеленгов. Будем считать, что задан интервал возможных значений азимутальных пеленгов (например, от 0° до 180°) и угломестных пеленгов (например, от 0° до 90°). Введем на данном интервале сетку пеленгов  и сетку углов места
и сетку углов места  системе (1) матрицу
системе (1) матрицу  заменим матрицей
заменим матрицей 
 в которой неизвестными остаются только амплитуды, соответствующие азимутальным пеленгам
в которой неизвестными остаются только амплитуды, соответствующие азимутальным пеленгам  и угломестным пеленгам
и угломестным пеленгам  .
.
Получаем СЛАУ относительно вектора неизвестных 

Количество элементов вектора амплитуд сигналов (количество столбцов матрицы системы) увеличивается до произведения размерностей сеток азимутальных и угломестных пеленгов - Mα×Mβ. Теперь вектор представляет собой распределение амплитуд (мощностей) по пеленгам (угловой спектр). В идеальном случае (шумы отсутствуют) количество ненулевых элементов вектора равно количеству фактически присутствующих в эфире ИРИ. Положение ненулевых элементов в векторе (в сетке пеленгов) характеризует пеленги соответствующих ИРИ.
Таким образом, введение сетки пеленгов решает не только проблему нелинейности задачи, но и проблему определения количества ИРИ.
Решив СЛАУ (3), получаем необходимую информацию по пеленгам.
Несмотря на линейность, задача (3) является вычислительно некорректном. Поэтому для ее решения необходимо применение специфических методов, в предлагаемом способе - это методы многокритериального математического программирования.
Предлагаемый способ пеленгования осуществляют следующим образом.
1. Принимают многолучевой сигнал источника электромагнитного излучения антенной решеткой из N+1 элементов и формируют ансамбль сигналов xn(t), зависящих от времени t и номера антенного элемента n=0, …, N.
2. Синхронно преобразуют ансамбль принятых сигналов xn(t) в цифровые сигналы
xn(z), где z - номер временного отсчета сигнала.
3. Преобразуют цифровые сигналы - xn(z) в сигнал комплексного амплитудно-фазового распределения (АФР)  описывающий амплитуды и фазы сигналов, принятых элементами решетки. Запоминают сигнал АФР
описывающий амплитуды и фазы сигналов, принятых элементами решетки. Запоминают сигнал АФР 
4. Генерируют и запоминают идеальный двумерный сигнал  комплексной фазирующей функции размером N×(Mα·Mβ), зависящий от заданной частоты приема и описывающий возможные направления прихода сигнала от каждого потенциального источника, где Мα - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигналов по азимуту
комплексной фазирующей функции размером N×(Mα·Mβ), зависящий от заданной частоты приема и описывающий возможные направления прихода сигнала от каждого потенциального источника, где Мα - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигналов по азимуту  и Mβ - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигналов по углу места
и Mβ - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигналов по углу места 
5. Формируют многокритериальную задачу математического программирования. Это преимущественно двухкритериальная задача:
с показателем степени нормы 0<р ≤ 1 и при ограничениях  или
или  ;
;
но может быть и трехкритериальная задача:
при ограничениях или .
6. Используя метод пороговой оптимизации или целевое программирование, от двухкритериальной задачи математического программирования переходят к однокритериальной задаче посредством перевода всех, кроме одного, из вышеуказанных функционалов в условия ограничений.
Метод пороговой оптимизации (или метод е-ограничений) приводит к различным возможным комбинациям целевых функций и ограничений:
a)  при
при 
b)  при
при 
c)  при
при 
d)  при
при 
Оценки правых частей ограничений δ и γ могут быть получены при независимой минимизации функционалов J1, и J2 при ограничениях  или
или  При этом может использоваться любой из методов математического программирования.
При этом может использоваться любой из методов математического программирования.
В целевом программировании существует две модели решения - архимедова и модель с приоритетами.
При использовании архимедовой модели все целевые функции переводят в ограничения и осуществляют минимизацию взвешенной суммы меры их отклонений от ограничений:

где wi - весовые коэффициенты, 
di - отклонения от ограничений.
В модели с приоритетами осуществляют последовательный перевод целевых функций в ограничения и минимизацию отклонения значений целевых функций от ограничений. При этом найденное на данном шаге значение отклонения di используют как оптимальное отклонение на следующем i+1 шаге:
шаг 1:  при
при 
шаг 2:  при
при 
Далее в зависимости от предъявляемых требований (критериев) эффективности:
а) если основным критерием эффективности предлагаемого способа является минимум интервальных оценок пеленгов сигналов (например, в случае близко направленных пеленгов), то лучше использовать нелинейное программирование для однокритериальной задачи, получаемой методом пороговой оптимизации;
б) если критичным показателем является время определения пеленга, то лучше применять квадратичное программирование для однокритериальной задачи, получаемой методом пороговой оптимизации;
в) если основным критерием эффективности является минимум интервальных оценок амплитуд (мощностей излучения) сигналов, то целесообразнее использовать архимедову модель из целевого программирования.
Если необходимо учесть сразу два показателя - минимум интервальных оценок для амплитуд сигналов и углов пеленгов, то лучшие результаты даст решение задачи минимизации энтропии. Для этого можно ввести дополнительную целевую функцию - энтропию -  для получения трехкритериальной задачи:
для получения трехкритериальной задачи:
при ограничениях  или
или 
Наибольший эффект дает вариант, когда функционалы J1 и J2 переведены в ограничения (метод пороговой оптимизации); то есть:
 при
при 

6. Итерационными вычислительными процедурами находят решение  одной из задач математического программирования, выбранных в п.5.
одной из задач математического программирования, выбранных в п.5.
7. По максимумам спектра мощности  полученного углового спектра сигнала
полученного углового спектра сигнала  определяют азимут α и угол места β каждого луча принятого многолучевого сигнала.
определяют азимут α и угол места β каждого луча принятого многолучевого сигнала.
8. Для уточнения полученных в п.7 точечных оценок используем способ получения интервальных оценок параметров ИРИ.
Ковариационную матрицу решения СЛАУ вида (3) (неизвестного вектора параметров) можно найти, используя теорему Крамера-Рао [2, С.380], если известна логарифмическая функция правдоподобия (логарифм совместной плотности вероятности входящих в рассмотрение измеренных величин - 
Теорема Крамера-Рао гласит: В каждом случае регулярной оценки непрерывного типа квадрат среднего квадратического отклонения (СКО) оценки  от истинного значения θ удовлетворяет неравенству
от истинного значения θ удовлетворяет неравенству
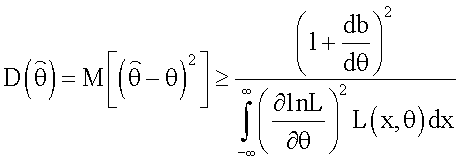
где lnL (x, θ) - натуральный логарифм функции правдоподобия L для выборки
x1x2…xn.
Тогда ковариационная матрица решения имеет вид 
где N - матрица, составленная из вторых производных логарифмической функции правдоподобия ln L, по всем элементам векторов  α и β.
α и β.
Поскольку на вектор  действует аддитивный гауссовый шум со среднеквадратичным отклонением (СКО), равным σ, и нулевым математическим ожиданием, то
действует аддитивный гауссовый шум со среднеквадратичным отклонением (СКО), равным σ, и нулевым математическим ожиданием, то  подчиняется многомерному нормальному закону распределения вида:
подчиняется многомерному нормальному закону распределения вида:

где  является математическим ожиданием вектора
является математическим ожиданием вектора  При найденных оценках
При найденных оценках  и αi и βj, i=1, 2,…, Mα, j=1, 2,…, Mβ выражение (4) будет являться функцией правдоподобия для
и αi и βj, i=1, 2,…, Mα, j=1, 2,…, Mβ выражение (4) будет являться функцией правдоподобия для  Найдем натуральный логарифм выражения (4):
Найдем натуральный логарифм выражения (4):

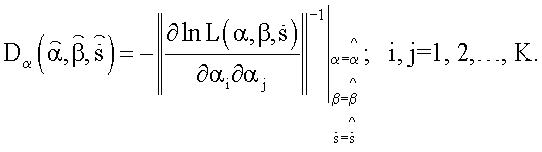
Тогда ковариационную матрицу оценок решения для азимутов, углов места и амплитуд определяем по формулам
В конце можно произвести построение и визуализацию пеленгационной панорамы, полученной на основе точечных и интервальных оценок амплитуд и пеленгов.
В качестве примера проверки реализации предлагаемого способа проведено имитационное моделирование на персональном компьютере с процессором Intel Celeron 2,00 ГГц с объемом оперативной памяти 512 МБ в математическом пакете Matlab 7.0.
Имитировались два сигнала с пеленгами α1=56°25' и α2=128°57' и амплитудами 10 и 12 мВ соответственно (β1 и β2 примем нулевыми). Полагали, что число элементов АС N+1=16, R=30, f0=20 МГц. Для каждого метода своя оптимальная сетка по α.
На компоненты вектора  действует аддитивный гауссовый шум с нулевым математическим ожиданием и СКО σ=0,5 мВ. Вектор
действует аддитивный гауссовый шум с нулевым математическим ожиданием и СКО σ=0,5 мВ. Вектор  везде один и тот же.
везде один и тот же.
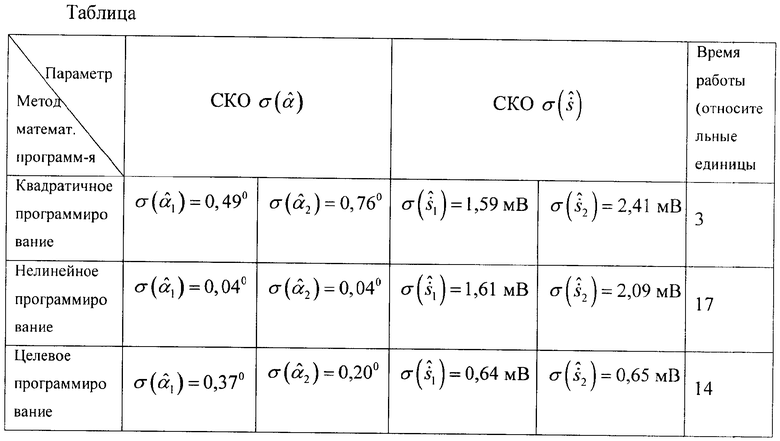
Пеленгационная панорама примера реализации способа представлена на фиг.1. СКО решений  и
и  и оценки времени счета (в сравнительных друг с другом относительных единицах по функции cputime пакета Matlab) выполнения способа с разными методами математического программирования: квадратичным, нелинейным и целевым, сведены в таблицу. Имитационное моделирование способа-прототипа [1] с такими же имитирующими сигналами после 10000 итераций не дало сходящегося решения.
и оценки времени счета (в сравнительных друг с другом относительных единицах по функции cputime пакета Matlab) выполнения способа с разными методами математического программирования: квадратичным, нелинейным и целевым, сведены в таблицу. Имитационное моделирование способа-прототипа [1] с такими же имитирующими сигналами после 10000 итераций не дало сходящегося решения.
Таким образом, преимуществами предлагаемого способа является следующее.
1. Повышение эффективности за счет учета дополнительных ограничений, налагаемых на решение и соответствующих физической постановке задачи, и за счет разных целевых функций.
2. Повышение надежности за счет получения интервальных оценок решения, позволяющие судить о возможном разбросе решений и, следовательно, о достоверности получаемых решений.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2285938, МПК G01S 5/04, 2006 г.
2. Грешилов А.А. Математические методы принятие решений: Учеб. пособие для вузов. - М.: Изд-во МГТУ им. Н.Э.Баумана, 2006. - 584 с.
Изобретение относится к радиотехнике, в частности к радиопеленгации, и может быть использовано в системах определения направления на источники радиоизлучения (ИРИ). Достигаемым техническим результатом является повышение эффективности определения точечных оценок азимутальных и угломестных пеленгов ИРИ, а также повышение надежности результатов за счет получения интервальных оценок решения. Получение углового спектра осуществляют введением переопределенного базиса посредством сетки пеленгов для формирования из исходной системы нелинейных уравнений системы линейных алгебраических уравнений и решением этой системы посредством формирования нескольких целевых функций и использованием, в зависимости от предъявляемых критериев эффективности, одного из методов многокритериального математического программирования, сведением многокритериальной задачи к однокритериальной задаче с ограничениями, получением итерационными вычислительными процедурами решения указанной однокритериальной задачи с ограничениями, определением точечных сигналов азимута α и угла места β каждого луча принятого многолучевого сигнала. Для определения интервальных оценок точечных сигналов на основе теоремы Крамера-Рао используют ковариационную матрицу решений, сформированную с помощью функции правдоподобия, связанной с исходной системой нелинейных уравнений. 1 з.п. ф-лы. 1 ил., 1 табл.
1. Способ пеленгования источников радиоизлучения на одной частоте, включающий прием многолучевого сигнала многоэлементной антенной решеткой, преобразование ансамбля принятых сигналов, зависящих от времени и номера антенного элемента, в цифровые сигналы, преобразование цифровых сигналов в сигнал  , описывающий комплексное распределение амплитуд и фаз на элементах решетки, формирование двумерного сигнала
, описывающий комплексное распределение амплитуд и фаз на элементах решетки, формирование двумерного сигнала  комплексной фазирующей функции размером N×(Mα·Mβ), описывающего возможные направления прихода от каждого потенциального источника на заданной частоте приема, где N - количество элементов антенной решетки, Мα - число угловых положений, соответствующих заданным потенциально возможным направлениям сигнала по азимуту α, Мβ - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигнала по углу места β, отличающийся тем, что получение углового спектра многолучевого сигнала осуществляют посредством задания сетки пеленгов принимаемых сигналов, формирования сигнала J1 как суммы квадратов разности между сигналами hi комплексного амплитудно-фазового распределения на каждом элементе антенной решетки и произведениями строк двумерного сигнала комплексной фазирующей функции на элементы
комплексной фазирующей функции размером N×(Mα·Mβ), описывающего возможные направления прихода от каждого потенциального источника на заданной частоте приема, где N - количество элементов антенной решетки, Мα - число угловых положений, соответствующих заданным потенциально возможным направлениям сигнала по азимуту α, Мβ - число угловых положений, соответствующих заданным потенциально возможным направлениям прихода сигнала по углу места β, отличающийся тем, что получение углового спектра многолучевого сигнала осуществляют посредством задания сетки пеленгов принимаемых сигналов, формирования сигнала J1 как суммы квадратов разности между сигналами hi комплексного амплитудно-фазового распределения на каждом элементе антенной решетки и произведениями строк двумерного сигнала комплексной фазирующей функции на элементы  сигнала
сигнала  , где i=1,2,…,N, j=1,2,…, Мα·Мβ, и сигнала J2, определяющего вид спектра мощности
, где i=1,2,…,N, j=1,2,…, Мα·Мβ, и сигнала J2, определяющего вид спектра мощности  как суммы дробных степеней
как суммы дробных степеней  формирования целевой функции и ограничения из сигналов
формирования целевой функции и ограничения из сигналов
J1 и J2 с последующим нахождением по максимумам спектра мощности  углового спектра сигнала
углового спектра сигнала  , точечных сигналов азимута α и угла места β, являющихся соответствующими точечными оценками, для каждого луча принятого многолучевого сигнала.
, точечных сигналов азимута α и угла места β, являющихся соответствующими точечными оценками, для каждого луча принятого многолучевого сигнала.
2. Способ по п.1, отличающийся тем, что дополнительно определяют интервальные оценки точечных сигналов с помощью обращения матрицы сигналов, элементы которой есть вторые частные производные сигнала, определяемого как квадрат разности двумерного сигнала  комплексной фазирующей функции, умноженного на точечные оценки углового спектра сигнала , и сигнала
комплексной фазирующей функции, умноженного на точечные оценки углового спектра сигнала , и сигнала  комплексного амплитудно-фазового распределения на каждом элементе антенной решетки, по элементам вектора при найденных точечных оценках пеленгов и амплитуд.
комплексного амплитудно-фазового распределения на каждом элементе антенной решетки, по элементам вектора при найденных точечных оценках пеленгов и амплитуд.
| СПОСОБ ПЕЛЕНГОВАНИЯ С ПОВЫШЕННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ | 2004 |
|
RU2285938C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| СПОСОБ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ИЗДЕЛИЙ | 2015 |
|
RU2589941C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| Способ изготовления ферритовыхСЕРдЕчНиКОВ МАгНиТНыХ гОлОВОК | 1979 |
|
SU834748A1 |
| US 5361073, 01.11.2006 | |||
| WO 2006114426 A1, 02.11.2006. | |||

