Настоящее изобретение относится к измерительной технике и может быть использовано для определения неуравновешенности деталей вращения, имеющих две плоскости приведения неуравновешенных масс.
Известен способ балансировки деталей вращения [1], при котором детали сообщают круговое колебательное движение, а о величине и угловой координате избыточной массы детали судят по амплитуде и фазе ее угловых колебаний. Недостатком этого способа является то, что он применим лишь для балансировки деталей, имеющих одну плоскость приведения неуравновешенности, проходящей через центр масс. Это детали типа дисков.
Аналогом настоящего изобретения является также способ балансировки роторов, описанный в [2] и взятый за прототип, по которому продольная ось ротора подвижно закреплена в центре координат неподвижной системы осей и описывает коническую поверхность, а неуравновешенность ротора, характеризуемая величиной радиальной и угловой координат его центра масс, определяется по угловому колебательному движению ротора вокруг его продольной оси.
Недостатком этого способа, как и способа [1], является возможность его применения также лишь для роторов, имеющих одну плоскость приведения неуравновешенности. Как известно, балансировка роторов, имеющих две плоскости приведения неуравновешенности, требует разделения и исключения взаимовлияния этих плоскостей для точного определения величин избыточных масс и их координат в каждой плоскости.
В этом способе это может быть достигнуто только расположением одной плоскости приведения неуравновешенности в неподвижной точке, совпадающей с центром координат системы неподвижных осей, что практически невозможно или связано с большими техническими трудностями, так как этому препятствует наличие на роторе цапф, предназначенных для установки его в подшипниках.
Сущность изобретения
Целями настоящего изобретения являются:
- первое - достижение возможности балансировки роторов с двумя плоскостями приведения неуравновешенности и повышение точности их балансировки;
- второе - повышение производительности балансировки.
Возможность балансировки роторов с двумя плоскостями приведения неуравновешенности достигается тем, что балансируемый ротор своей продольной осью располагают параллельно подвижной оси системы, совершающей коническое вращательное движение, называемое сферическим колебательным, а одну из плоскостей приведения неуравновешенности (при вертикальном расположении ротора она будет нижней) совмещают с плоскостью, проходящей через неподвижный центр системы и перпендикулярной ее подвижной оси, совершающей коническое вращательное движение. Такое расположение ротора исключает необходимость пропускания цапфы ротора сквозь неподвижный центр системы, являющийся вершиной конической поверхности, что в свою очередь повышает точность балансировки.
Действительно, точка ротора в верхней плоскости приведения неуравновешенности в месте расположения избыточной массы m1, как и все другие точки в этой плоскости, описывает эллиптические кривые, близкие к окружности, и, следовательно, является источником информации о неуравновешенности ротора, а вторая точка ротора в нижней плоскости приведения неуравновешенности с избыточной массой m2, как и все другие точки в этой плоскости, совершает лишь продольные угловые колебания в вертикальной плоскости с амплитудой, равной половине угла раствора конуса, и поэтому не является источником информации о неуравновешенности ротора.
Сам же ротор совершает поперечные угловые колебания вокруг своей продольной оси, амплитуда которых определяется только величиной избыточной массы m1 и амплитудой сферического колебательного движения ротора, а фаза их относительно его фазы - угловой координатой этой массы.
Избыточная же масса m2 в нижней плоскости приведения не вызывает поперечных угловых колебаний ротора, т.к. сила инерции этой массы направлена параллельно продольной оси ротора и не создает крутящего момента.
Точность же балансировки повышается благодаря исключению влияния неуравновешенных масс m1 и m2 при их измерении.
Повышение производительности балансировки настоящим способом достигается тем, что аналогичным образом вокруг подвижной оси системы, совершающей коническое вращательное движение, устанавливается два и более роторов, которые в каждой плоскости приведения балансируются за один пуск - установку одновременно.
Сущность настоящего изобретения поясняется чертежом, на котором представлена схема установки балансируемых роторов, показаны действующие силы, моменты и движения, происходящие при их балансировке.
Здесь OXYZ - система неподвижных координатных осей. Ось OZ′ - подвижная ось системы осей OX′Y′Z′, совершающая коническое вращательное движение вокруг оси OZ, характеризующееся некоторой круговой частотой ω и углом раствора конуса, равным 2β. Неподвижный опорный центр 1, являющийся центром сферы радиусом R и вершиной конуса О. Балансируемые роторы 2 и 3 со своими цапфами 4 и 5. m1 и m2 - избыточные массы ротора, расположенные на торцах радиуса r и лежащие в плоскостях приведения I и II, а α1 и α2 - их угловые координаты. F1 - сила инерции массы m1, содержащая крутящий момент, пропорциональный m1r, и вызывающая поперечные угловые колебания ротора ϕ1 при балансировке в плоскости I. ϕ2 - продольные угловые колебания точек ротора в плоскости II с размахом, равным углу раствора конуса 2β.
F2 - сила инерции массы m2, действующая в вертикальной плоскости. Она направлена параллельно продольной оси ротора и, следовательно, не вызывает его поперечных угловых колебаний.
Плоскость приведения неуравновешенности II совпадает с плоскостью, проходящей через неподвижный центр 1 перпендикулярно подвижной оси OZ′ и продольной оси O2Z1, расположенной параллельно оси OZ′ на некотором расстоянии l от нее. Как видно из чертежа цапфа 4 ротора 2 удалена на такое же расстояние и не мешает расположению плоскости приведения II в плоскости, проходящей перпендикулярно оси ротора O2Z1. Таким образом, исключается взаимовлияние плоскостей приведения неуравновешенности I и II и тем самым повышается точность балансировки.
Величина избыточной массы m1 и ее угловая координата α1 определяется по амплитуде и фазе поперечных угловых колебаний ротора относительно фазы сферического колебательного движения подвижной оси системы OZ′. Определение избыточной массы m2 и ее угловой координаты α2 ротора 2 производится аналогично путем его переустановки таким образом, что плоскости приведения I и II меняются местами.
Для повышения производительности, обеспечения симметрии и равновесия системы устанавливается ротор 3 и более, неуравновешенность которых в каждой плоскости приведения определяется одновременно подобным же образом.
На основании изложенного можно заключить, что использование настоящего изобретения позволит осуществить балансировку роторов с двумя плоскостями приведения неуравновешенных масс и повысить ее точность и производительность.
Перечень схем, рисунков и чертежей
Чертеж, содержащий схему установки балансируемых роторов, действующих сил и движений, происходящих при их балансировке.
Литература
1. Авторское свидетельство №316956. Способ балансировки деталей вращения. МПК G01m 1/16. Бюллетень №30 от 07.10.1971. УДК 620.1.05:531.24 (088.8).
2. Авторское свидетельство №462098. Способ балансировки роторов. М. кл. G01m 1/16. Бюллетень №8 от 28.02.75. УДК 62-755:62-25 (088.8).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2009 |
|
RU2441211C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Устройство для балансировки ротора | 2022 |
|
RU2795641C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2382999C1 |
| СПОСОБ ВИБРАЦИОННОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2101689C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |
Изобретение относится к измерительной технике. Сущность: ротору, установленному вертикально, сообщают сферическое колебательное движение. Ротор продольной осью располагают параллельно оси системы, движущейся по конической поверхности, а одну из двух плоскостей приведения неуравновешенности последовательно совмещают с плоскостью, проходящей через вершину конической поверхности перпендикулярно продольной оси ротора, причем исключают взаимовлияние избыточных масс m1 и m2, расположенных в верхней и нижней плоскостях соответственно. Технический результат: повышение точности и производительности балансировки. 1 ил.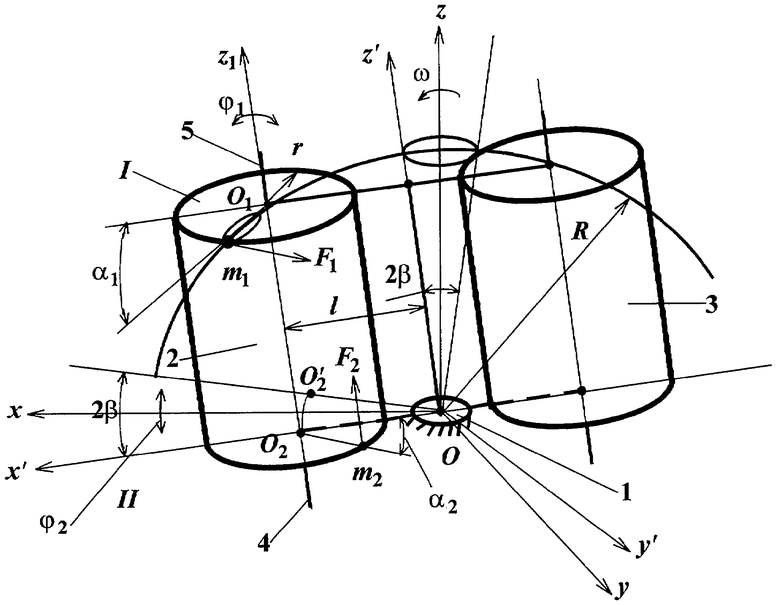
Способ балансировки роторов с двумя плоскостями приведения неуравновешенности, заключающийся в том, что ротору, установленному вертикально, сообщают сферическое колебательное движение, отличающийся тем, что ротор продольной осью располагают параллельно оси системы, движущейся по конической поверхности, а одну из двух плоскостей приведения неуравновешенности последовательно совмещают с плоскостью, проходящей через вершину конической поверхности перпендикулярно продольной оси ротора, причем исключают взаимовлияние избыточных масс m1 и m2, расположенных в верхней и нижней плоскостях соответственно.
| Способ балансировки роторов | 1973 |
|
SU462098A1 |
| RU 2004112998 A 20.10.2005 | |||
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| US 4285240 25.08.1981. | |||

