Изобретение относится к приборостроению, в частности к балансировке динамически настраиваемых гироскопов.
Известна установка для коррекции дисбалансов ДНГ в вакууме [1] содержащая основание, технологический корпус, датчик угла положения ротора гироскопа, корректирующий инструмент, выполненный в виде отверток для завинчивания балансировочных винтов, и механизм его перемещения.
Известен ДНГ [2] содержащий корпус, размещенные на нем привод, катушки датчика момента и датчик угла, установленный в корпусе вал, предназначенный для закрепления на нем торсионов промежуточного и посадочного колец и маховика, усилитель обратной связи, соединенный с датчиком угла, и источник питания.
Недостатком данного устройства является низкая производительность коррекции осевого дисбаланса ДНГ.
Целью изобретения является повышение производительности коррекции осевого дисбаланса ДНГ.
Это достигается тем, что предлагаемое устройство снабжено коммутатором, входы которого соединены с усилителем обратной связи, а выход с катушками датчика момента. Это дает возможность осуществлять коррекцию осевого дисбаланса путем перемещения маховика, установленного на посадочном кольце с возможностью осевого перемещения, под действием электромагнитных сил взаимодействия маховика с катушками датчика момента.
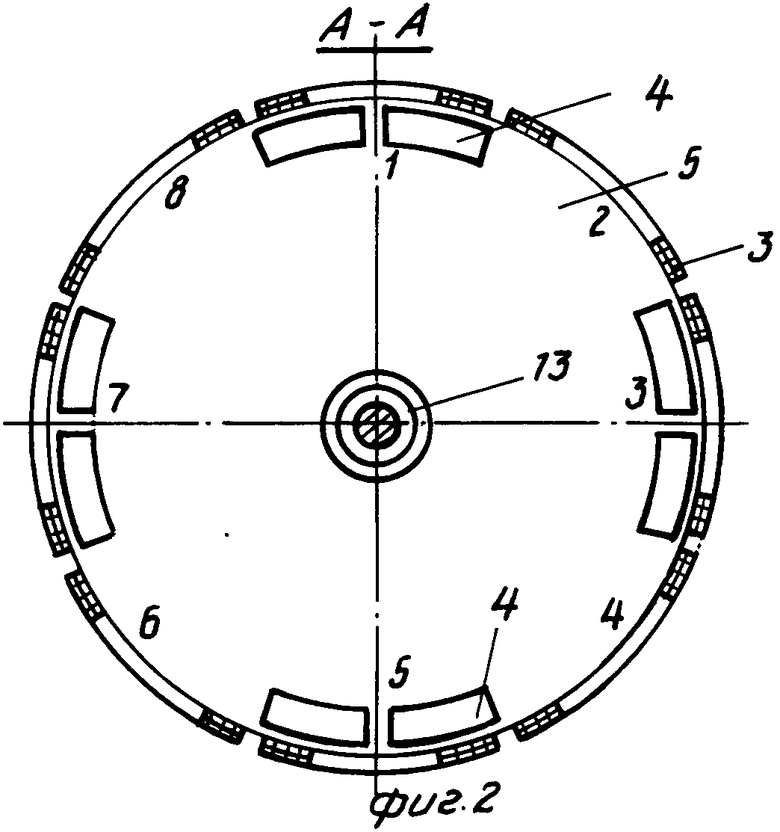
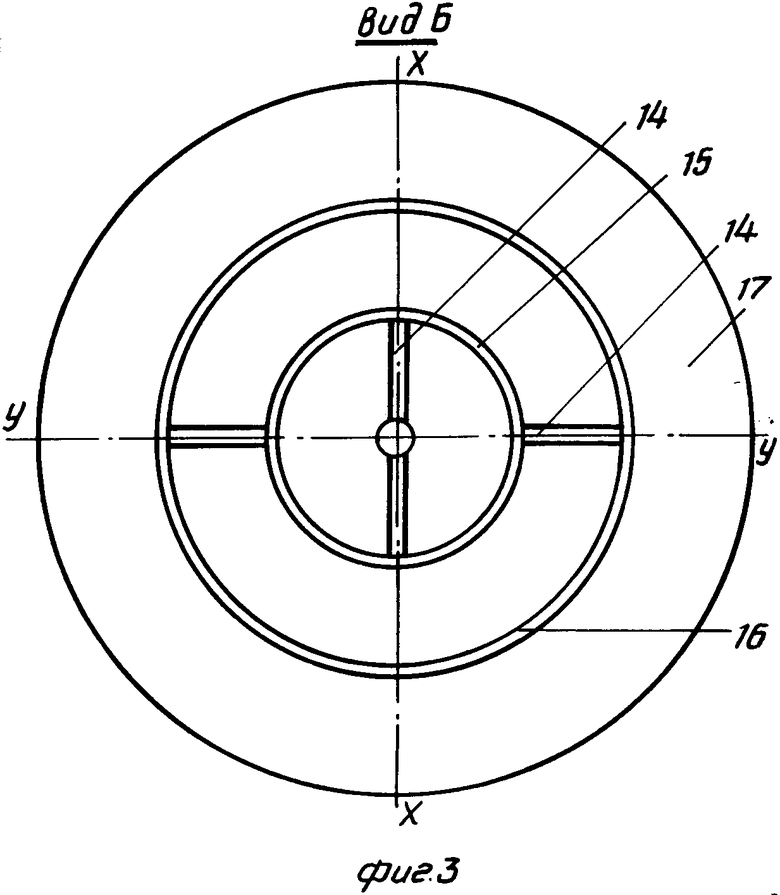
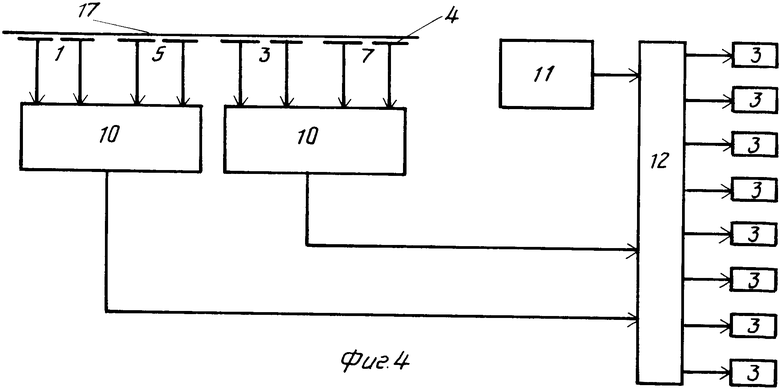
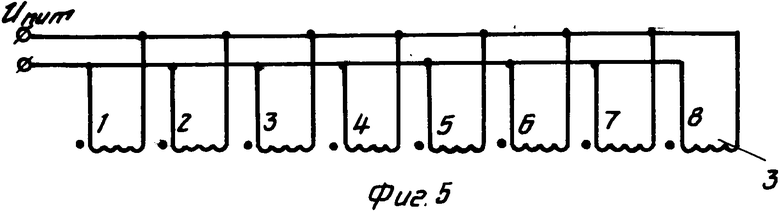
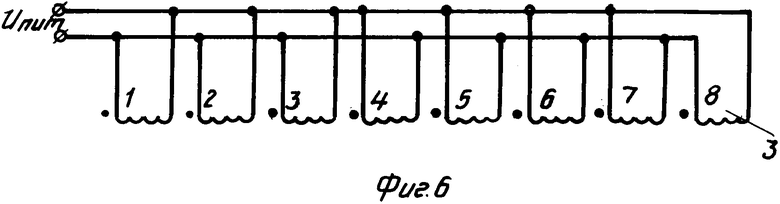
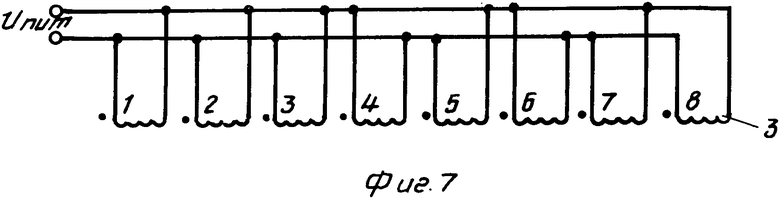
На фиг. 1 представлено устройство для коррекции осевого дисбаланса ДНГ; на фиг. 2 разрез А-А на фиг.1; на фиг.3 вид по стрелке Б на фиг.1; на фиг.4 блок-схема устройства для коррекции осевого дисбаланса ДНГ; на фиг.5 подключение катушек датчика момента в режиме определения осевого дисбаланса ДНГ; на фиг. 6 подключение катушек датчика момента в режиме коррекции осевого дисбаланса ДНГ; на фиг.7 подключение катушек датчика момента в комбинированном режиме.
Устройство для коррекции осевого дисбаланса ДНГ содержит основание 1, на котором закреплен корпус 2 с катушками датчика 3 момента и обкладками емкостного датчика угла 4 на подложке 5. В корпусе 2 установлен привод 6, содержащий электродвигатель 7, вал-втулку 8 и подшипники 9. Обкладки емкостного датчика угла 4 подключены к входам усилителя 10 обратной связи, выход которого вместе с источником 11 питания подключен через коммутатор 12 к катушкам датчика момента 3.
Работа устройства осуществляется следующим образом. Вал 13 с торсионами 14, промежуточным кольцом 15, посадочным кольцом 16 и маховиком 17 с закрепленным на нем кольцевыми постоянным магнитом 18 вставляется во втулку 8. Приводом 6 разворачивают вал 13 с упругой подвеской (торсионы 14, промежуточное кольцо 15, посадочное кольцо 16) и маховиком 17 в положение, в котором одна пара торсионов 14 находится в горизонтальной плоскости.
При осевом смещении центра масс маховика 17 от оси горизонтальных торсионов 14 появляется момент, разворачивающий маховик на угол α1.
α1 (1) где P вес маховика 17;
(1) где P вес маховика 17;
Δ1 осевое смещение центра масс маховика 17 от оси первой пары торсионов 14;
С1 угловая жесткость первой пары торсионов 14.
При развороте вала 13 с упругой подвеской и маховиком 17 в положение, когда с горизонтальной плоскостью совмещается ось второй пары торсионов 14, в случае осевого смещения центра масс маховика 17 от оси второй пары торсионов 14 появляется момент, разворачивающий маховик 17 на угол α2.
α2 (2) где Р вес маховика 17;
(2) где Р вес маховика 17;
Δ 2 осевое смещение центра масс маховика 17 от оси второй пары торсионов 14;
С2 угловая жесткость второй пары торсионов 14.
При подключении катушек датчика момента 3 в режиме определения осевого дисбаланса определяются знаки и величины моментов
M1 P ˙ Δ1 (3)
М2 P ˙ Δ2 (4)
Далее катушки датчика 3 момента подключаются в режиме коррекции осевого дисбаланса. При этом под действием электромагнитных сил взаимодействия кольцевого постоянного магнита 18 и токов в катушках датчика момента 3 осуществляется осевое смещение маховика 17 относительно посадочного кольца 16. Перемещение маховика 17 производится на величину
осуществляется осевое смещение маховика 17 относительно посадочного кольца 16. Перемещение маховика 17 производится на величину
Δ3 (5) причем
(5) причем
Δ1 Δ3 ± δ
Δ2 Δ3 ± δ (6) При этом будет наблюдаться остаточный момент
М3 ± P ˙ δ (7) Контроль перемещения маховика производится по сигналу с датчика угла 4 и прекращается при достижении величин углов ±
± 
(8) ±
± 
При подключении катушек датчика момента 3 в комбинированном режиме часть их (а именно 2, 4, 6, 8) работает в режиме определения осевого дисбаланса, а часть (1, 3, 5, 7) в режиме коррекции осевого дисбаланса. В этом случае перемещение маховика 17 контролируется по сигналу с катушек датчика 3 момента и прекращается при достижении величины остаточного момента М3.
При непрерывном вращении вала 13 с упругой подвеской и маховиком 17 производится одновременное определение и контроль осевого дисбаланса с его компенсацией. В этом случае катушки датчика момента 3 подключаются в режиме компенсации осевого дисбаланса (контрольный сигнал снимается с датчика угла 4) или в комбинированном режиме (контрольный сигнал снимается с части катушек датчика момента 3, работающих в режиме определения осевого дисбаланса). Перемещение маховика 17 прекращается при обнулении по периоду вращения контрольного сигнала.
Фиксация маховика 17 в сбалансированном положении осуществляется сваркой маховика 17 с посадочным кольцом 16 или полимеризацией клея, нанесенного непосредственно перед балансировкой на посадочные места маховика 17 и посадочного кольца 16. После компенсации осевого дисбаланса и фиксации маховика 17 в сбалансированном положении вал 13 с упругой подвеской и маховиком 17 извлекается из втулки 8 и передается на последующие технологические операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1988 |
|
RU2065575C1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |
| Установка для изучения режимов работы динамически настраиваемого гироскопа | 2024 |
|
RU2829671C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| ГИРОСКОП | 2005 |
|
RU2298151C1 |
| Способ балансировки динамически настраиваемого гироскопа | 2018 |
|
RU2690039C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| ГИРОСКОП | 2001 |
|
RU2210734C2 |
Изобретение относится к балансировке динамически настраиваемых гироскопов и позволяет повысить производительность балансировки путем введения коммутатора в усилитель обратной связи.Устройство для коррекции осевого дисбаланса ДНГ содержит корпус 2 с размещенными на нем катушками 3 датчика момента и обкладками 4 емкостного датчика угла. В корпусе размещены привод, содержащий электродвигатель 7 и вал 13, предназначенный для закрепления на нем торсионов 14 промежуточного и посадочного колец 15 и 16, а также маховика 17. Датчик угла подключен ко входам усилителя обратной связи, выход которого вместе с источником питания подключен через коммутатор к датчику момента. При непрерывном вращении вала 13 с маховиком 17 производится одновременное определение осевого дисбаланса и его компенсация. 7 ил.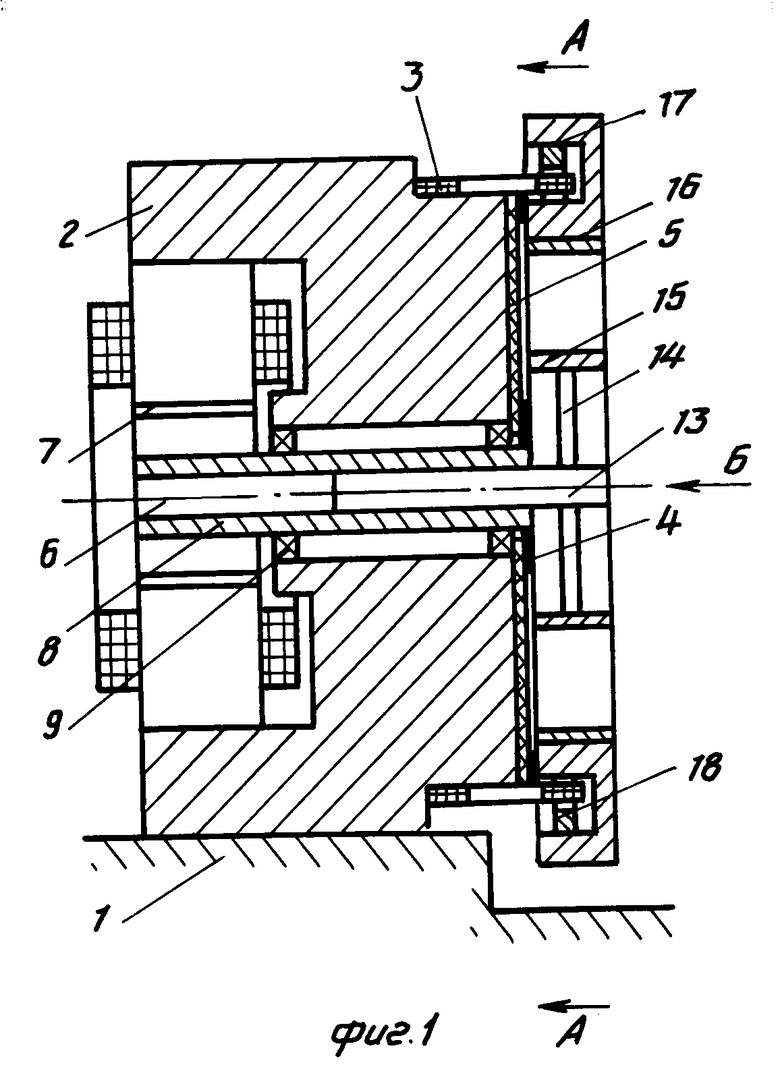
УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ОСЕВОГО ДИСБАЛАНСА ДИНАМИЧЕСКИ НАСТРАИВАЕМЫХ ГИРОСКОПОВ, содержащее корпус, размещенные на нем привод, катушки датчика момента и датчик угла, установленный в корпусе вал, предназначенный для закрепления на нем торсионов промежуточного и посадочного колец маховика, усилитель обратной связи, соединенный с датчиком угла, и источник питания, отличающееся тем, что, с целью повышения производительности, устройство снабжено коммутатором, входы которого соединены с усилителем обратной связи и с источником питания, а выход с катушками датчика момента.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МЕМБРАННЫЙ АППАРАТ ДЛЯ РАЗДЕЛЕНИЯ И ОЧИСТКИ КРОВИ | 1991 |
|
RU2046646C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
